Керований дебалансний віброзбуджувач
Номер патенту: 88546
Опубліковано: 26.10.2009
Формула / Реферат
Керований дебалансний віброзбуджувач, що складається з корпусу, розміщеного в ньому механізму керування та дебалансного вала з гвинтовими канавками, на якому закріплено один нерухомий дебаланс та два рухомих дебаланси, з'єднані з валом кульовими шпонками, статичний момент кожного рухомого дорівнює половині статичного моменту нерухомого дебалансу, який відрізняється тим, що кульові шпонки, які з'єднують рухомі дебаланси з валом, розміщені в площині, що проходить через вісь вала і перпендикулярна до осі симетрії дебалансу.
Текст
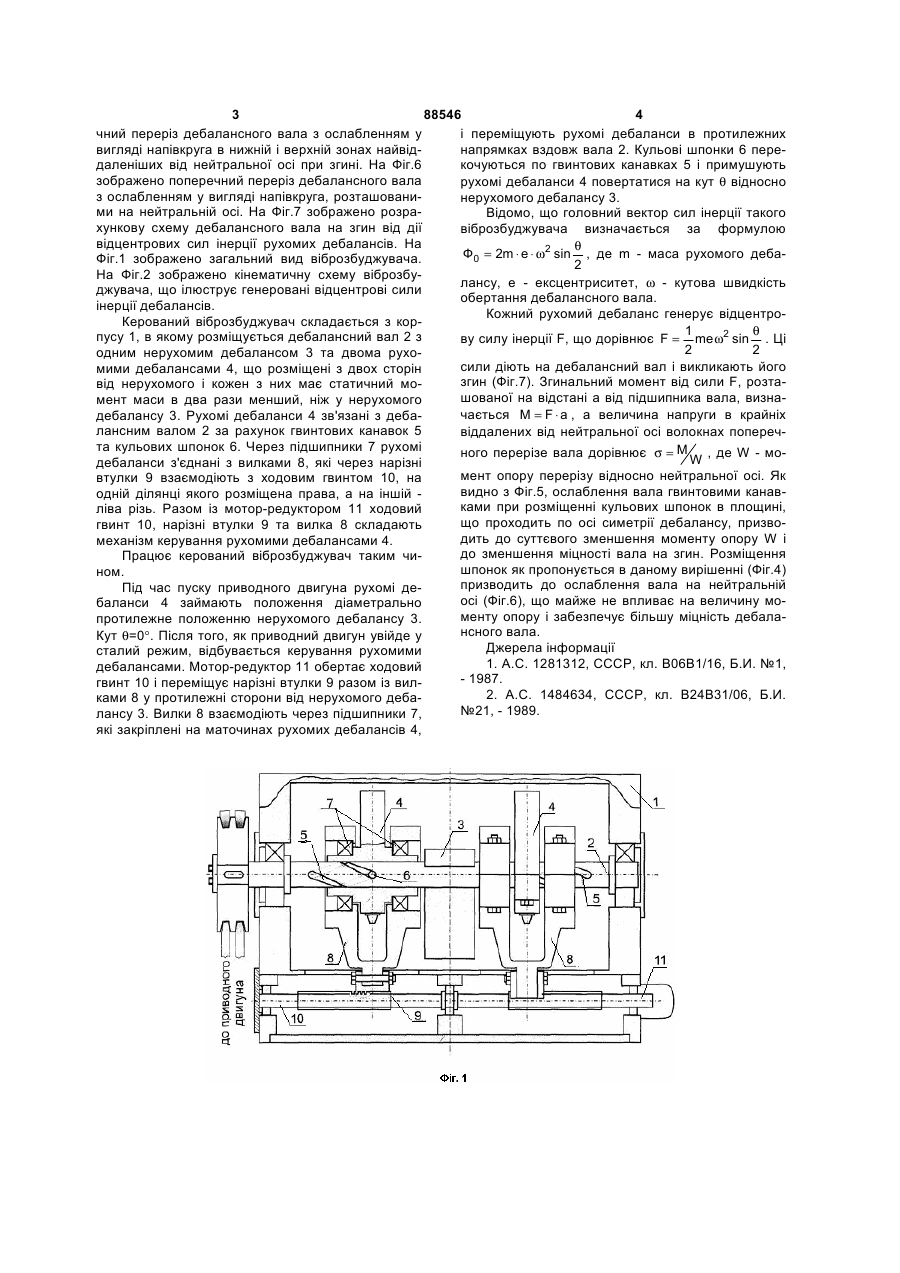
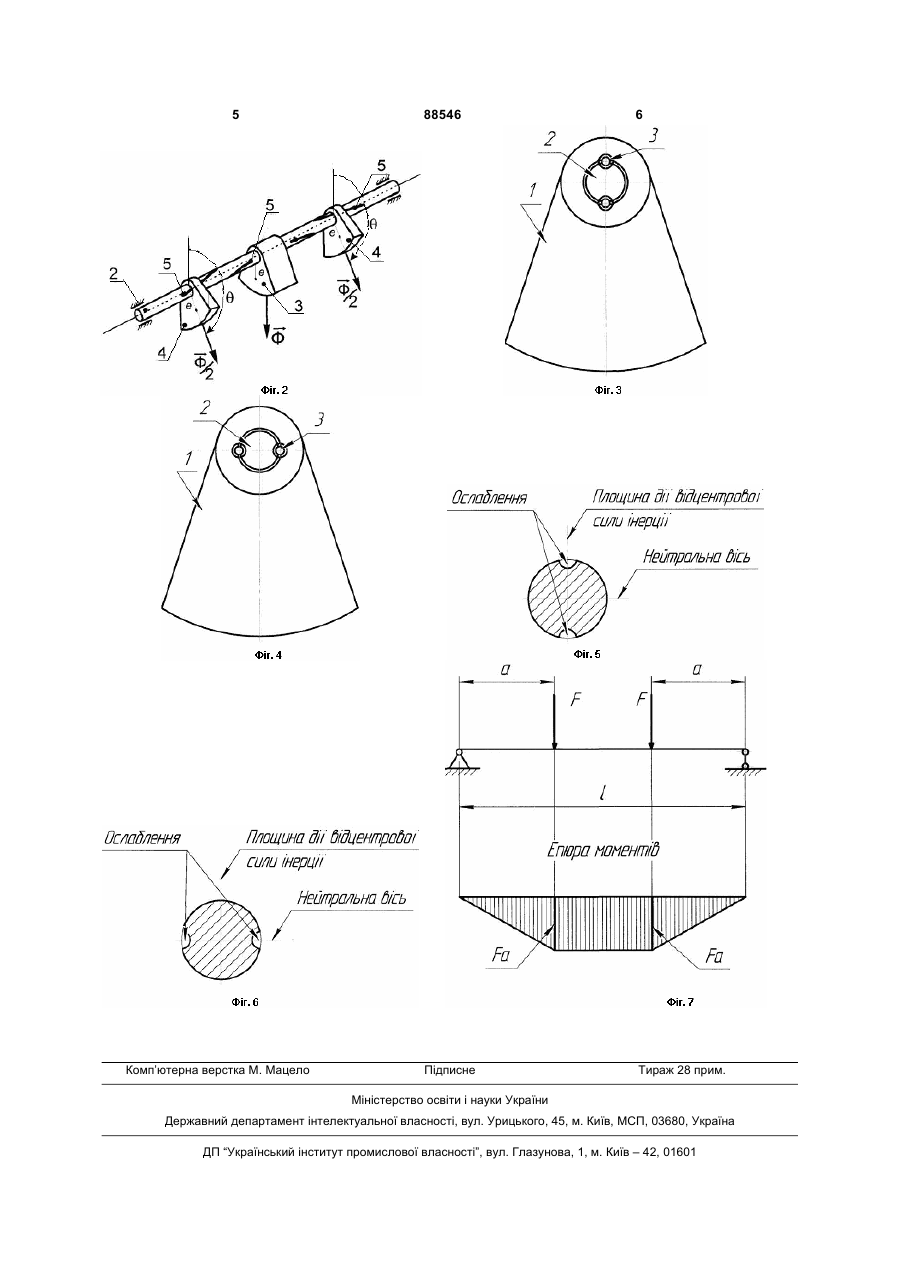
Керований дебалансний віброзбуджувач, що складається з корпусу, розміщеного в ньому механізму керування та дебалансного вала з гвинтовими канавками, на якому закріплено один нерухомий дебаланс та два рухомих дебаланси, з'єднані з валом кульовими шпонками, статичний момент кожного рухомого дорівнює половині статичного моменту нерухомого дебалансу, який відрізняється тим, що кульові шпонки, які з'єднують рухомі дебаланси з валом, розміщені в площині, що проходить через вісь вала і перпендикулярна до осі симетрії дебалансу. (19) (21) a200801041 (22) 29.01.2008 (24) 26.10.2009 (46) 26.10.2009, Бюл.№ 20, 2009 р. (72) СЕРДЮК ЛЕОНІД ІВАНОВИЧ, ПІСКОВИЙ СЕРГІЙ СЕРГІЙОВИЧ (73) ПОЛТАВСЬКИЙ НАЦІОНАЛЬНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ ІМЕНІ ЮРІЯ КОНДРАТЮКА (56) SU 1281312 A1, 07.01.1987. Бюл.№1 SU 1484634 A1, 07.06.1989. Бюл.№21 UA 40341 A, 16.07.2001. Бюл.№6 UA 9094 U, 15.09.2005 SU 1442271 А1, 07.12.1988. Бюл.№45 SU 1695962 A1, 07.12.1991. Бюл.№45 3 88546 4 чний переріз дебалансного вала з ослабленням у і переміщують рухомі дебаланси в протилежних вигляді напівкруга в нижній і верхній зонах найвіднапрямках вздовж вала 2. Кульові шпонки 6 передаленіших від нейтральної осі при згині. На Фіг.6 кочуються по гвинтових канавках 5 і примушують зображено поперечний переріз дебалансного вала рухомі дебаланси 4 повертатися на кут θ відносно з ослабленням у вигляді напівкруга, розташованинерухомого дебалансу 3. ми на нейтральній осі. На Фіг.7 зображено розраВідомо, що головний вектор сил інерції такого хункову схему дебалансного вала на згин від дії віброзбуджувача визначається за формулою відцентрових сил інерції рухомих дебалансів. На θ Ф0 = 2m ⋅ e ⋅ ω2 sin , де m - маса рухомого дебаФіг.1 зображено загальний вид віброзбуджувача. 2 На Фіг.2 зображено кінематичну схему віброзбулансу, е - ексцентриситет, ω - кутова швидкість джувача, що ілюструє генеровані відцентрові сили обертання дебалансного вала. інерції дебалансів. Кожний рухомий дебаланс генерує відцентроКерований віброзбуджувач складається з кор1 θ пусу 1, в якому розміщується дебалансний вал 2 з ву силу інерції F, що дорівнює F = me ω2 sin . Ці 2 2 одним нерухомим дебалансом 3 та двома рухосили діють на дебалансний вал і викликають його мими дебалансами 4, що розміщені з двох сторін згин (Фіг.7). Згинальний момент від сили F, розтавід нерухомого і кожен з них має статичний мошованої на відстані a від підшипника вала, визнамент маси в два рази менший, ніж у нерухомого чається M = F ⋅ a , а величина напруги в крайніх дебалансу 3. Рухомі дебаланси 4 зв'язані з дебалансним валом 2 за рахунок гвинтових канавок 5 віддалених від нейтральної осі волокнах поперечта кульових шпонок 6. Через підшипники 7 рухомі ного перерізe вала дорівнює σ = M , де W - моW дебаланси з'єднані з вилками 8, які через нарізні мент опору перерізу відносно нейтральної осі. Як втулки 9 взаємодіють з ходовим гвинтом 10, на видно з Фіг.5, ослаблення вала гвинтовими канаводній ділянці якого розміщена права, а на іншій ками при розміщенні кульових шпонок в площині, ліва різь. Разом із мотор-редуктором 11 ходовий що проходить по осі симетрії дебалансу, призвогвинт 10, нарізні втулки 9 та вилка 8 складають дить до суттєвого зменшення моменту опору W і механізм керування рухомими дебалансами 4. до зменшення міцності вала на згин. Розміщення Працює керований віброзбуджувач таким чишпонок як пропонується в даному вирішенні (Фіг.4) ном. призводить до ослаблення вала на нейтральній Під час пуску приводного двигуна рухомі деосі (Фіг.6), що майже не впливає на величину мобаланси 4 займають положення діаметрально менту опору і забезпечує більшу міцність дебалапротилежне положенню нерухомого дебалансу 3. нсного вала. Кут θ=0°. Після того, як приводний двигун увійде у Джерела інформації сталий режим, відбувається керування рухомими 1. А.С. 1281312, СССР, кл. В06В1/16, Б.И. №1, дебалансами. Мотор-редуктор 11 обертає ходовий - 1987. гвинт 10 і переміщує нарізні втулки 9 разом із вил2. А.С. 1484634, СССР, кл. В24В31/06, Б.И. ками 8 у протилежні сторони від нерухомого деба№21, - 1989. лансу 3. Вилки 8 взаємодіють через підшипники 7, які закріплені на маточинах рухомих дебалансів 4, 5 Комп’ютерна верстка М. Мацело 88546 6 Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюControlled unbalance vibration exciter
Автори англійськоюSerdiuk Leonid Ivanovych, Piskovyi Serhii Serhiiovych
Назва патенту російськоюУправляемый дебалансный вибровозбудитель
Автори російськоюСердюк Леонид Иванович, Песковой Сергей Сергеевич
МПК / Мітки
МПК: B06B 1/10
Мітки: керований, віброзбуджувач, дебалансний
Код посилання
<a href="https://ua.patents.su/3-88546-kerovanijj-debalansnijj-vibrozbudzhuvach.html" target="_blank" rel="follow" title="База патентів України">Керований дебалансний віброзбуджувач</a>
Керований дебалансний віброзбуджувач
Номер патенту: 32745
Опубліковано: 26.05.2008
Автори: Пісковий Сергій Сергійович, Сердюк Леонід Іванович
МПК: B06B 1/10
Мітки: керований, дебалансний, віброзбуджувач
Формула / Реферат:
Керований дебалансний віброзбуджувач, що складається з корпусу, розміщеного в ньому механізму керування та дебалансного вала з гвинтовими канавками, на якому закріплено один нерухомий дебаланс та два рухомих дебаланси, з'єднані з валом кульовими шпонками, статичний момент кожного рухомого дорівнює половині статичного моменту нерухомого дебаланса, який відрізняється тим, що кульові шпонки, які з'єднують рухомі дебаланси з валом, розміщені в...
Керований віброзбуджувач гвинтових коливань
Номер патенту: 40341
Опубліковано: 15.07.2004
Автори: Сердюк Леонід Іванович, Осіна Людмила Михайлівна, Давиденко Юрій Олександрович, Костенко Микола Іванович
МПК: B06B 1/10
Мітки: коливань, керований, віброзбуджувач, гвинтових
Формула / Реферат:
Керований віброзбуджувач гвинтових коливань, який складається з корпуса, розміщеного в ньому механізму керування та дебалансного вала, на якому закріплено один нерухомий дебаланс та два рухомих дебаланси, з'єднаних з валом шаровими шпонками, що виконані з можливістю контактування з гвинтовими канавками, які виконані на ділянках згаданого вала, розташованих по обидва боки від нерухомого дебаланса, причому статичний момент кожного рухомого...
Планетарний дебалансний інерційний запобіжний механізм
Номер патенту: 71529
Опубліковано: 15.11.2004
Автор: Нагорняк Галина Степанівна
МПК: F16D 43/00
Мітки: дебалансний, інерційний, планетарний, механізм, запобіжний
Формула / Реферат:
Планетарний дебалансний інерційний запобіжний механізм з ведучим водилом і веденим центральним колесом, які зв'язані між собою за допомогою сателітів, кожен з яких нерухомо з'єднаний з встановленим в підшипниках водила і його кришки валом, на якому жорстко закріплений ведучий диск з периферійним виступом-поводком, а в проміжку між ближніми торцями сателіта і ведучого диска на валу на підшипниках встановлений дебаланс, який відрізняється тим,...
Дебалансний вібратор
Номер патенту: 18010
Опубліковано: 16.10.2006
Автори: Сухін Микола Васильович, Решевський Олександр Петрович, Аляб'єв Вадим Леонідович, Закутний Володимир Вікторович
МПК: B06B 1/10
Мітки: дебалансний, вібратор
Формула / Реферат:
Дебалансний вібратор, що включає вал, установлений в підшипникових опорах, центральний дебаланс, розташований на валу між підшипниковими опорами симетрично відносно підшипникових опор, два однакових периферійних дебаланси, розташованих на консольних ділянках вала, що виступають за підшипникові опори, який відрізняється тим, що центральний дебаланс виконаний із статичним моментом, рівним 0,9-1,1 суми статичних моментів периферійних...
Пружна муфта для передачі обертального моменту від електродвигуна на віброзбуджувач технологічної вібромашини
Номер патенту: 18087
Опубліковано: 17.06.1997
Автори: Солов`ян Сергій Дмитрович, Бахмудов Курбан Алісултанович, Олехнович Казимир Олександрович
МПК: F16D 43/00
Мітки: вібромашини, передачі, електродвигуна, муфта, пружна, віброзбуджувач, обертального, моменту, технологічної
Формула / Реферат:
Упругая муфта для передачи крутящего момента от электродвигателя на вибровозбудитель технологической вибромашины, включающая упругий трубчатый элемент из полимерного материала, отличающаяся тем, что между упругим элементом и валом вибровозбудителя дополнительно установлен промежуточный вал, размещенный внутри полости пустотелого дебалансного вала, в конечной части которой запрессована цилиндрическая втулка с поперечным гребнем, входящим в...
Попередній патент: Чотирисекційна стріла крана
Наступний патент: Пристрій для транспортування і очистки коренебульбоплодів
Випадковий патент: Секція механізованого кріплення