Планетарний дебалансний інерційний запобіжний механізм

Формула / Реферат
Планетарний дебалансний інерційний запобіжний механізм з ведучим водилом і веденим центральним колесом, які зв'язані між собою за допомогою сателітів, кожен з яких нерухомо з'єднаний з встановленим в підшипниках водила і його кришки валом, на якому жорстко закріплений ведучий диск з периферійним виступом-поводком, а в проміжку між ближніми торцями сателіта і ведучого диска на валу на підшипниках встановлений дебаланс, який відрізняється тим, що центр маси кожного дебалансу послідовно зміщений в коловому напрямку відносно радіальної осі, яка проходить через центральну вісь водила і вісь кожного сателіта на кут ![]() , де Zn - кількість пар діаметрально протилежно розміщених сателітів і мінімальне число Zn, що дорівнює трьом, а по периферії ведучого диска діаметрально протилежно виконані наскрізні осьові отвори і по одній стороні кожного диска в один із отворів запресовані виступи-поводки у вигляді пальців, а з інших їх сторін в інші отвори запресовані пальці-зрівноважувачі, і маси виступів-поводків і пальців-зрівноважувачів рівні між собою.
, де Zn - кількість пар діаметрально протилежно розміщених сателітів і мінімальне число Zn, що дорівнює трьом, а по периферії ведучого диска діаметрально протилежно виконані наскрізні осьові отвори і по одній стороні кожного диска в один із отворів запресовані виступи-поводки у вигляді пальців, а з інших їх сторін в інші отвори запресовані пальці-зрівноважувачі, і маси виступів-поводків і пальців-зрівноважувачів рівні між собою.
Текст
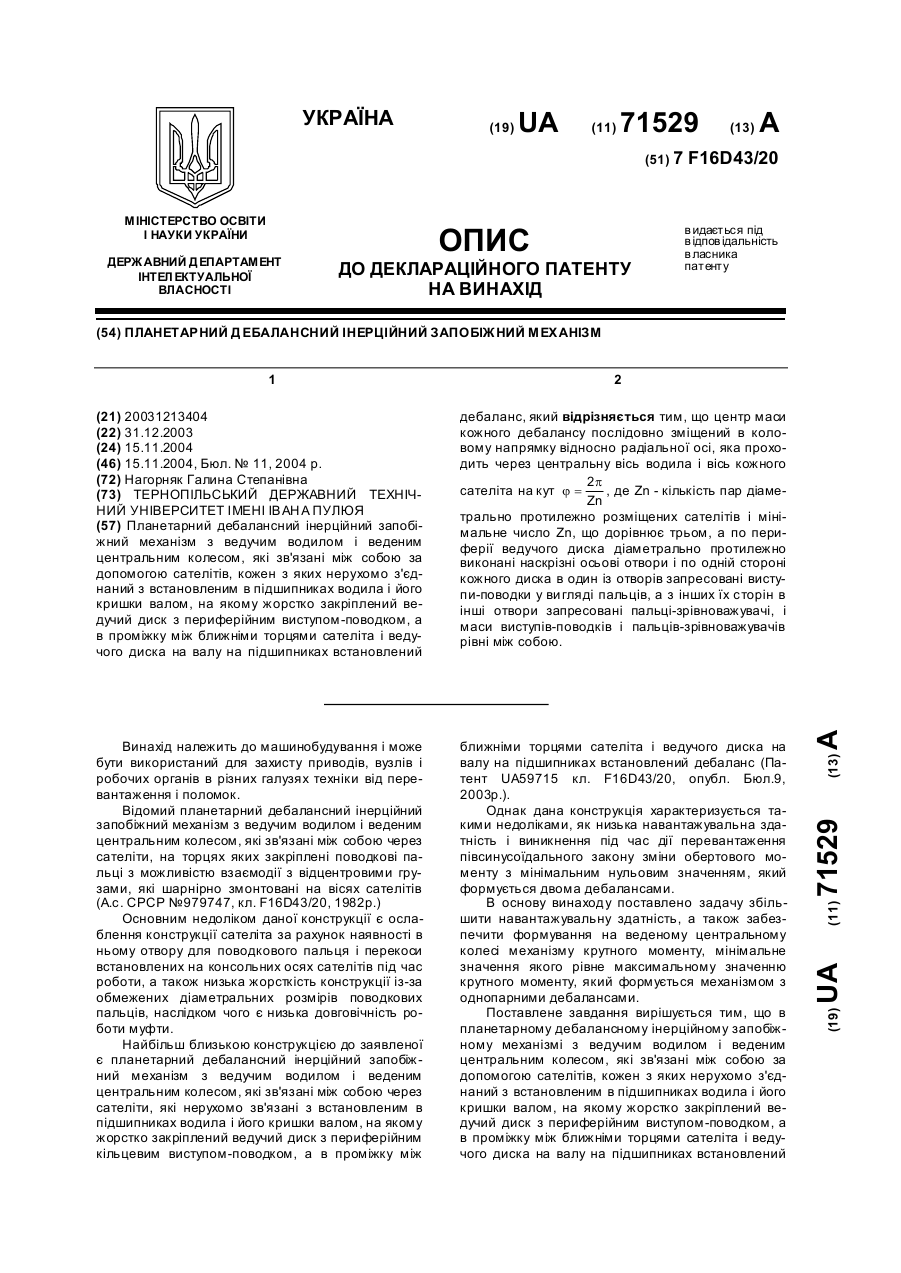
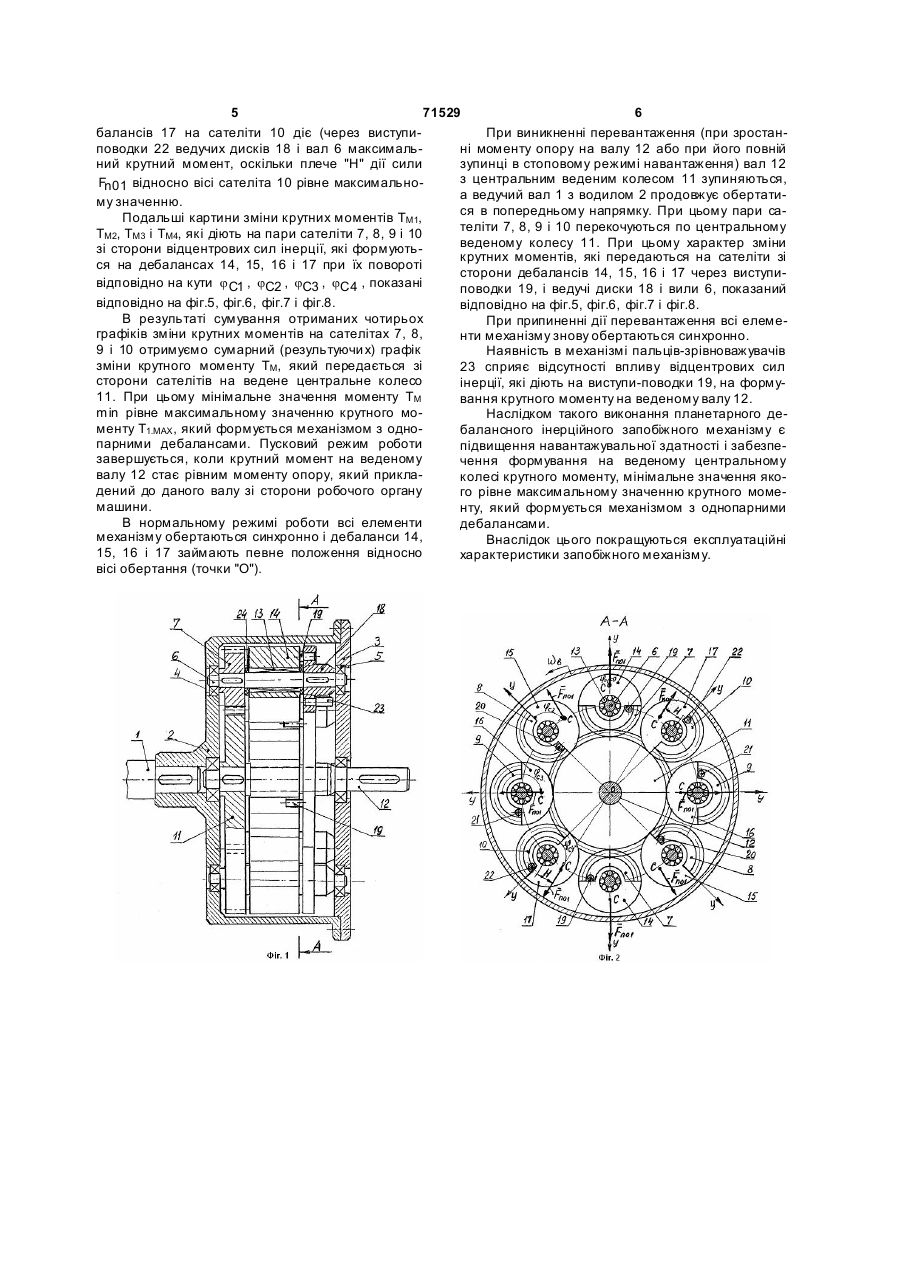
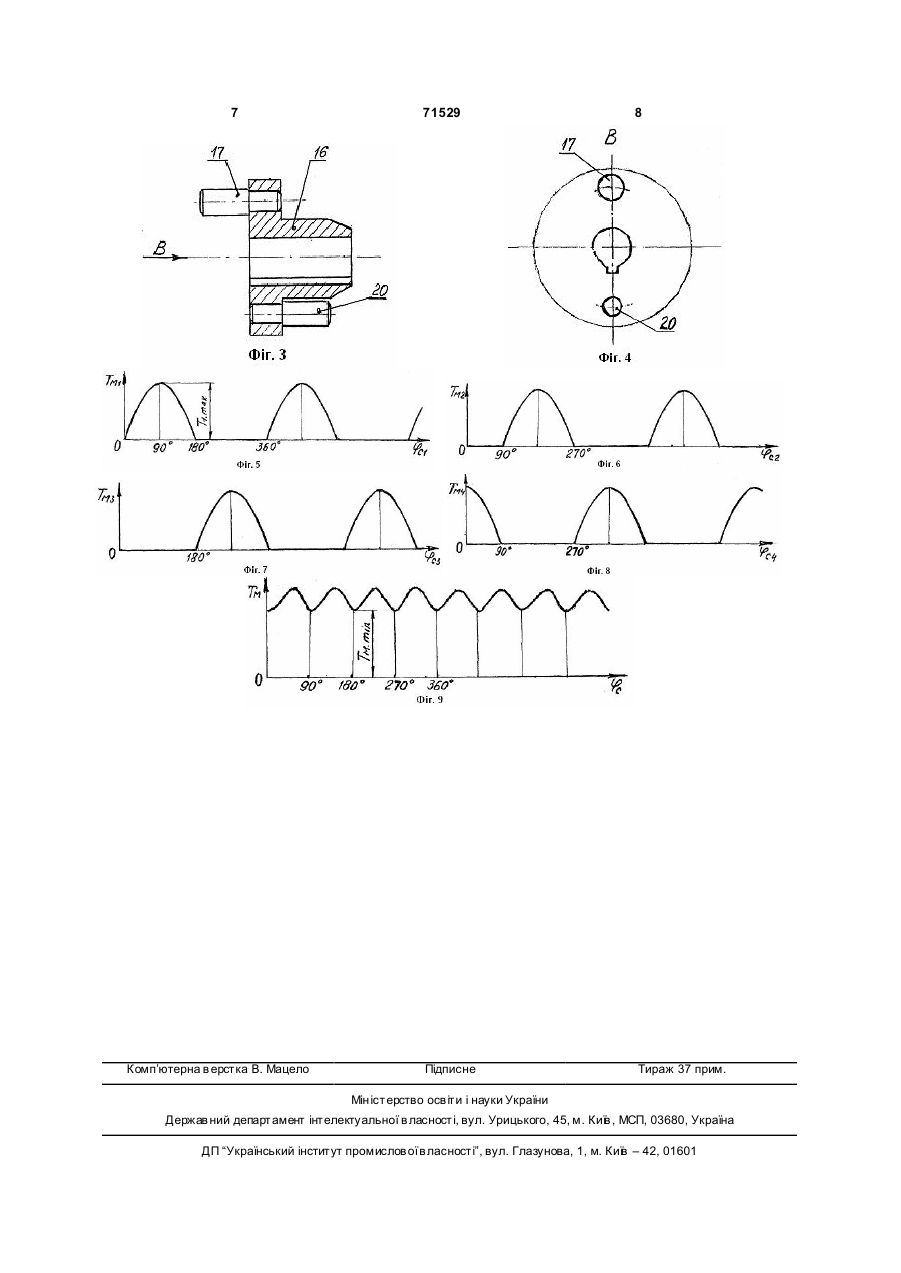
Планетарний дебалансний інерційний запобіжний механізм з ведучим водилом і веденим центральним колесом, які зв'язані між собою за допомогою сателітів, кожен з яких нерухомо з'єднаний з встановленим в підшипниках водила і його кришки валом, на якому жорстко закріплений ведучий диск з периферійним виступом-поводком, а в проміжку між ближніми торцями сателіта і ведучого диска на валу на підшипниках встановлений 3 71529 4 дебаланс, причому центр маси кожного дебалансу ві сторони дебалансів на валах 6 встановлені плапослідовно зміщений в коловому напрямку відносстмасові шайби 24. но радіальної вісі, яка проходять через центральну Планетарний дебалансний інерційний запобіжний механізм працює наступним чином. В пуско2p вісь водила і вісь кожного сателіта на кут j = , вому режимі роботи, тобто в процесі збільшення Zn швидкості обертання вала 1 з водилом 2, сателіти де Zn - кількість пар діаметрально-протилежно 7, 8, 9 і 10 перекошуються по центральному веденому колесі 11. При цьому ведучі диски 18 своїми розміщених сателітів і мінімальне число Zn рівне виступами-поводками 19 періодично взаємодіють трьом, а по периферії ведучого диска діаметральз дебалансами 14, 15, 16 і 17. По мірі збільшення но-протилежно виконані наскрізні осьові отвори і швидкості обертання ведучого вала 1 зростає вепо одній стороні кожного диска в один із отворів личина відцентрової сили інерції Fn01, яка діє на запресовані виступи-поводки у вигляді пальців, а з други х їх сторін в другі отвори запресовані пальцідебаланси. Величина сили Fn01 = m × wв 2 × ri , де m зрівноважувачі і маси виступів-поводків і пальців- маса дебалансу; wв - кутова швидкість обертанзрівноважувачів рівні між собою. Планетарний дебалансний інерційний запобіня водила 2 (вала 1); ri - відстань від вісі обертанжний механізм на прикладі механізму з чотирма ня водила 2 (точки "О") до точки "С" розміщення парами сателітів показаний на фіг.1 повздовжній центра маси дебалансу. розріз; на фіг.2 січення А-А на фіг.1; на фіг.3 ведуОскільки в розробленому механізмі центр мачий диск; на фіг.4 вид по В на фіг.3; на фіг.5 графік си кожного дебалансу послідовно зміщений в козміни крутного моменту, який формується дебалаловому напрямку відносно радіальної вісі "OY", яка нсами, встановлених на валах першої пари діамепроходять через центральну вісь водила 2 (точку трально-протилежно розміщених сателітів; на фіг. "О") і вісь кожного сателіта 7, 8, 9 і 10 на кут 6 графік зміни крутного моменту, який формується 2p дебалансами, встановлених на валах другої пари j= , де Zn - кількість пар сателітів, то значенсателітів; на фіг. 7 гра фік зміни крутного моменту, Zn який формується дебалансами, встановлених на ня сили Fn01, яка діє на дебаланси 14, 15, 16 і 17 валах третьої пари сателітів; на фіг.8 графік зміни в різних положеннях центрів мас дебалансів (точок крутного моменту, який формується дебалансами, "С") будуть різними. встановлених на валах че твертої пари сателітів; Так для розглядуваного чотирипарного планена фіг. 9 результуючий графік зміни крутного мотарного дебалансного інерційного запобіжного менту на виході планетарного дебалансного інермеханізму, наприклад при миттєвому початковому ційного механізму при перевантаженні. положенні центрів мас (точки "С") дебалансів 14 Планетарний дебалансний інерційний запобі(фіг.2) відцентрова сила інерції Fn01 буде мати жний механізм складається з встановленого на ведучому валу 1 водила 2. З водилом 2 жорстко максимальне значення, а плече "Н" дії сили відноз'єднана кришка 3. В підшипниках 4 водила 2 і сно вісі обертання сателіта 7 рівне нульовому знапідшипниках 5 його кришки 3 рівномірно по колу ченню. В даному положенні дебалансів крутний розміщені вали 6, на яких діаметральномомент, як добуток відцентрової сили інерції Fn01 протилежно жорстко встановлені пари сателіти 7, на плече "Н" рівний нульовому значенню. Для чо8, 9 і 10. Дані сателіти знаходяться в постійному тирьохпарного механізму центри мас дебалансів кінематичному зачепленні з центральним веденим 2p 2p p колесом 11, яке встановлене на веденому валу 12. послідовно зміщені на кут jC = = = , тобНа кожному валі 6 на підшипниках 13 встановлені Zn 4 2 дебаланси 14, 15, 16 і 17. При цьому центр мас то на 90°. Центри мас наступної пари дебалансів кожного дебалансу послідовно зміщений в колоp 15 зміщені на кут jC 2 = відносно радіальної вісі вому напрямку відносно радіальної вісі "OY", яка 2 проходить через центральну вісь водила 2 (точку "OY" (фі г.2). В даному положенні дебалансів 15 2p крутний момент, який діє на сателіти 8 рівний нуО) і вісь кожного сателіта 7, 8, 9 і 10 на кут j = , Zn льовому значенню, оскільки виступи-поводки 20 не впливають на дебаланси 15, і під дією відцентроде Zn - кількість пар діаметрально-протилежно вої сили інерції дебаланси 15 намагаються відійти розміщених сателітів. Мінімальне число Zn рівне в коловому напрямку від виступів-поводків 20. трьом. При коловому зміщенні центрів мас наступної На валах 6 жорстко закріплені ведучі диски 18. третьої пари дебалансів 16 на кут jC3 = p відносПо периферії кожного ведучого диска 18 діаметно радіальної вісі "OY" сила Fn01 має мінімальне рально-протилежно виконані наскрізні осьові отвозначення (оскільки відстань від точки "О" до точки ри і по одній стороні диска в один із отворів запресовані виступи-поводки у вигляді пальців 19, 20, 21 "С" мінімальна), і крутний момент рівний нульовому значенню, оскільки плече дії сили відносно вісі і 22, а з других їх сторін в другі отвори запресовані обертання сателіта 9 рівне нулю. Центри мас пальці-зрівноважувачі 23. При цьому маси вистуостанньої четвертої пари дебалансів 17 зміщені в пів-поводків і пальців-зрівноважувачів рівні між коловому напрямку відносно радіальної вісі "OY" собою. Для зменшення сил бокового тертя між деба3p на кут jC 4 = . В цьому випадку зі сторони делансами і сателітами і ведучими дисками по обид2 5 71529 6 балансів 17 на сателіти 10 діє (через виступиПри виникненні перевантаження (при зростанповодки 22 ведучих дисків 18 і вал 6 максимальні моменту опору на валу 12 або при його повній ний крутний момент, оскільки плече "Н" дії сили зупинці в стоповому режимі навантаження) вал 12 з центральним веденим колесом 11 зупиняються, Fn01 відносно вісі сателіта 10 рівне максимальноа ведучий вал 1 з водилом 2 продовжує обертатиму значенню. ся в попередньому напрямку. При цьому пари саПодальші картини зміни крутних моментів ТМ1, теліти 7, 8, 9 і 10 перекочуються по центральному ТМ2, ТМ3 і ТМ4, які діють на пари сателіти 7, 8, 9 і 10 веденому колесу 11. При цьому характер зміни зі сторони відцентрових сил інерції, які формуютькрутних моментів, які передаються на сателіти зі ся на дебалансах 14, 15, 16 і 17 при їх повороті сторони дебалансів 14, 15, 16 і 17 через виступивідповідно на кути j C1 , jC2 , jC3 , jC4 , показані поводки 19, і ведучі диски 18 і вили 6, показаний відповідно на фіг.5, фіг.6, фіг.7 і фіг.8. відповідно на фіг.5, фіг.6, фіг.7 і фіг.8. В результаті сумування отриманих чотирьох При припиненні дії перевантаження всі елемеграфіків зміни крутних моментів на сателітах 7, 8, нти механізму знову обертаються синхронно. 9 і 10 отримуємо сумарний (результуючи х) графік Наявність в механізмі пальців-зрівноважувачів зміни крутного моменту ТМ, який передається зі 23 сприяє відсутності впливу відцентрових сил сторони сателітів на ведене центральне колесо інерції, які діють на виступи-поводки 19, на форму11. При цьому мінімальне значення моменту ТМ вання крутного моменту на веденому валу 12. min рівне максимальному значенню крутного моНаслідком такого виконання планетарного дементу Т1.MAX , який формується механізмом з однобалансного інерційного запобіжного механізму є парними дебалансами. Пусковий режим роботи підвищення навантажувальної здатності і забезпезавершується, коли крутний момент на веденому чення формування на веденому центральному валу 12 стає рівним моменту опору, який приклаколесі крутного моменту, мінімальне значення якодений до даного валу зі сторони робочого органу го рівне максимальному значенню крутного момемашини. нту, який формується механізмом з однопарними В нормальному режимі роботи всі елементи дебалансами. механізму обертаються синхронно і дебаланси 14, Внаслідок цього покращуються експлуатаційні 15, 16 і 17 займають певне положення відносно характеристики запобіжного механізму. вісі обертання (точки "О"). 7 Комп’ютерна в ерстка В. Мацело 71529 8 Підписне Тираж 37 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюPlanetary debalance inertial safety mechanism
Автори англійськоюNahorniak Halyna Stepanivna
Назва патенту російськоюПланетарный дебалансный инерционный предохранительный механизм
Автори російськоюНагорняк Галина Степановна
МПК / Мітки
МПК: F16D 43/00
Мітки: інерційний, механізм, дебалансний, планетарний, запобіжний
Код посилання
<a href="https://ua.patents.su/4-71529-planetarnijj-debalansnijj-inercijjnijj-zapobizhnijj-mekhanizm.html" target="_blank" rel="follow" title="База патентів України">Планетарний дебалансний інерційний запобіжний механізм</a>
Інерційний планетарний трансформатор моменту
Номер патенту: 34821
Опубліковано: 15.04.2003
Автор: Данилишин Григорій Михайлович
МПК: F16H 33/00, F16H 31/00, B60K 17/06
Мітки: моменту, трансформатор, інерційний, планетарний
Формула / Реферат:
1. Інерційний планетарний трансформатор моменту з ведучим водилом, веденим центральним колесом, по меншій мірі двома єатепітами з кінематично зв'язаними з можливістю переміщення в одній з діаметральних площин сателіту дебалансами, причому кожний з дебалансів кінематично зв'язаний з водилом за допомогою кривошипа довжиною половини можливого переміщення дебалансу по одну сторону від осі сателіту, який відрізняється тим, що він обладнаний для...
Планетарний імпульсний запобіжний механізм
Номер патенту: 59715
Опубліковано: 15.09.2003
Автори: Нагорняк Галина Степанівна, Рогатинський Роман Михайлович
МПК: F16D 43/00
Мітки: планетарний, механізм, імпульсний, запобіжний
Формула / Реферат:
Планетарний імпульсний запобіжний механізм з ведучим водилом і веденим центральним колесом, які зв'язані між собою за допомогою сателітів, який відрізняється тим, що кожен сателіт нерухомо зв'язаний з встановленим в підшипниках водила і його кришки валом, на якому жорстко закріплений ведучий диск з периферійним кільцевим виступом-поводком і в проміжку між ближніми торцями сателіта і ведучого диска на валу на підшипниках встановлений дебаланс,...
Інерційний планетарний трансформатор моменту
Номер патенту: 36321
Опубліковано: 15.04.2003
Автор: Данилишин Григорій Михайлович
МПК: B60K 17/06, F16H 31/00, F16H 33/00
Мітки: моменту, інерційний, трансформатор, планетарний
Формула / Реферат:
Інерційний планетарний трансформатор моменту з ведучим водилом, веденим центральним циліндричним колесом, принаймні двома сателітами з встановленими з можливістю обертання відносно осей, перпендикулярних одній з діаметральних площин кожного сателіту, дебалансами, який відрізняється тим, що кожен з дебалансів зв’язаний з водилом конічною передачею з передаточним числом рівним одиниці, причому одне з коліс конічної передачі жорстко зв'язане з...
Інерційний планетарний трансформатор моменту
Номер патенту: 55495
Опубліковано: 15.04.2003
Автор: Данилишин Григорій Михайлович
МПК: F16H 33/00, F16H 31/00
Мітки: інерційний, планетарний, трансформатор, моменту
Формула / Реферат:
1. Інерційний планетарний трансформатор моменту з ведучою епіциклічною шестірнею, веденим водилом щонайменше двома сателітами з кінематично зв'язаними з ними дебалансами, який відрізняється тим, що кожен з дебалансів встановлений з можливістю обертання відносно осі, перпендикулярної до одної з діаметральних площин відповідного сателіта, і зв'язаний з водилом конічною передачею з передаточним числом рівним одиниці, одне з коліс якої жорстко...
Інерційний планетарний трансформатор моменту
Номер патенту: 35094
Опубліковано: 15.03.2001
Автор: Данилишин Григорій Михайлович
МПК: F16H 33/00, F16H 31/00, B60K 17/06
Мітки: планетарний, трансформатор, моменту, інерційний
Формула / Реферат:
1. Інерційний планетарний трансформатор моменту з ведучим водилом, веденим центральним колесом, по меншій мірі двома сателітами з підпружиненими з можливістю переміщення в одній з діаметральних площин сателіту і по одну сторону від осі відповідного сателіту дебалансами, який відрізняється тим, що дебаланси підпружинені на водилі.2. Трансформатор моменту по п. 1, який відрізняється тим, що принаймні одна з пружин орієнтації дебалансу...
Попередній патент: Інерційний запобіжний механізм для відключення приводу машини при перевантаженні
Наступний патент: Шнековий прес для видалення соку
Випадковий патент: Система для одержання дифузійного соку