Спосіб керування крановим візком з вантажем на гнучкому підвісі
Номер патенту: 91263
Опубліковано: 12.07.2010
Автори: Ромасевич Юрій Олександрович, Ловейкін Вячеслав Сергійович
Формула / Реферат
Спосіб керування крановим візком з вантажем на гнучкому підвісі, у якому на крановий візок діють з приводним зусиллям протягом перехідних режимів руху, який відрізняється тим, що приводне зусилля має плавний характер зміни в часі і описується виразом:
 ,
,
де nн - номінальна швидкість вантажного візка, м/с;
g - прискорення вільного падіння, м/с2;
m1 - приведена до поступального руху маса візка, кг;
m2 - маса вантажу, кг;
t - поточний час, с;
t1 - час перехідного режиму руху візка, с;
L - довжина гнучкого підвісу, м;
W - гальмуюче зусилля опору переміщенню візка, Н.
Текст
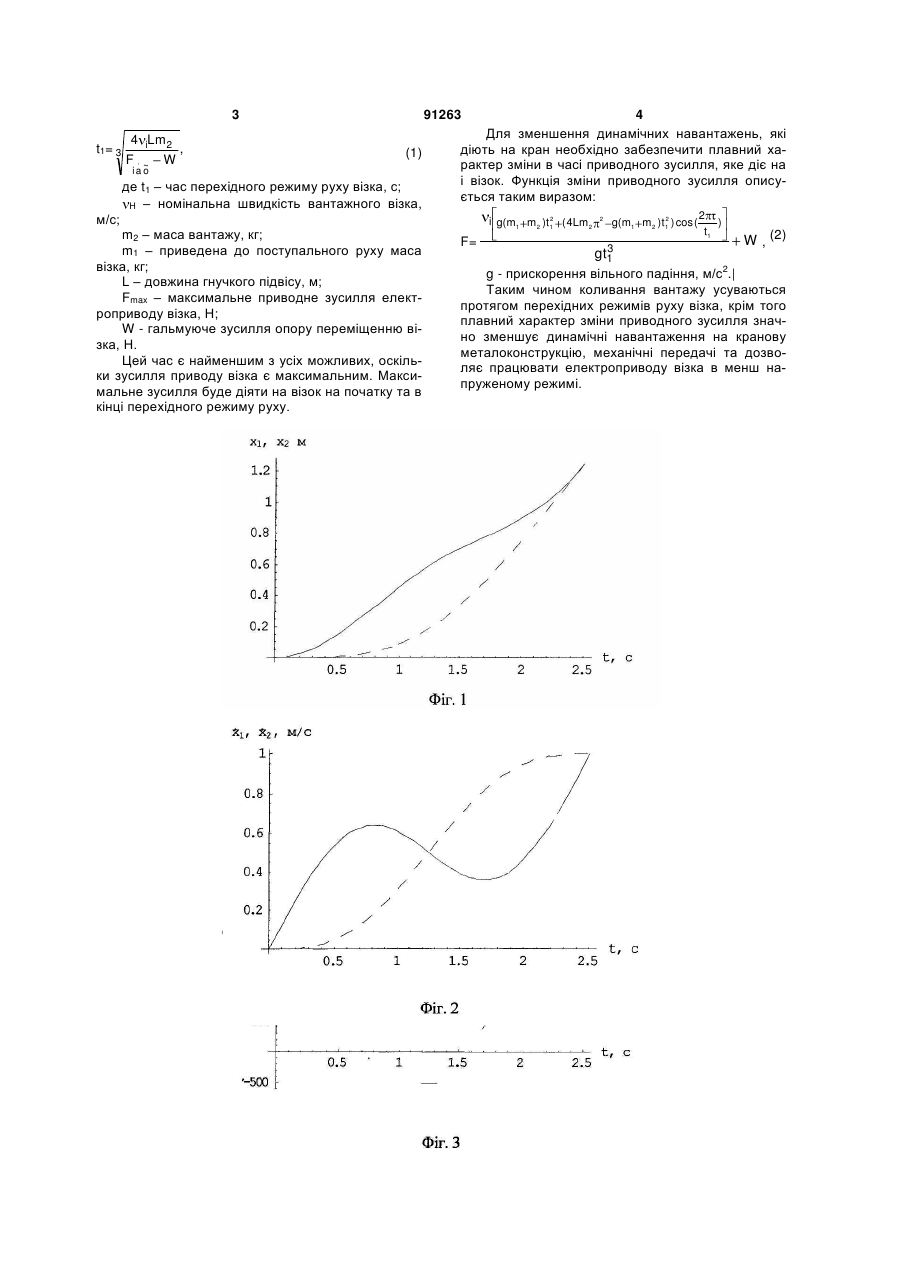
Спосіб керування крановим візком з вантажем на гнучкому підвісі, у якому на крановий візок діють з приводним зусиллям протягом перехідних режимів руху, який відрізняється тим, що приводне зусилля має плавний характер зміни в часі і описується виразом: Винахід відноситься до підйомнотранспортного устаткування, а саме до способів керування рухом візка крана з вантажем, який закріплений на гнучкому підвісі. Відомий спосіб усунення коливань вантажу, відповідно до якого пуск і зупинка візка здійснюються на трьох часових інтервалах, по закінченню яких коливання вантажу будуть відсутні (Смехов А.А., Ерофеев Н.И. Оптимальное управление подьемно-транспортными машинами. - М.: Машиностроение, 1975. - 239с). Усунення коливань вантажу проходить якнайшвидше (з максимальною швидкодією). Даний спосіб обраний в якості прототипу. Недоліком цього способу є те, що під час перехідних режимів руху візка значно зростають динамічні навантаження на механічні передачі та металоконструкцію крана. Крім того, електродвигун при такому способі керування повинен розвивати максимальні моменти, як додатні так і від'ємні. Все це негативно впливає на надійність крана та зменшує термін його експлуатації. Винаходом ставиться завдання покращити динаміку процесу усунення коливань вантажу на гнучкому підвісі за мінімальний час. Поставлене винаходом завдання досягається тим, що протягом перехідних режимів руху на крановий візок діє приводне зусилля, яке має плавний характер зміни в часі і є функцією маси переміщуваного вантажу, довжини гнучкого підвісу, номінальної швидкості візка та часу перехідного режиму, причому час перехідного режиму при даному максимальному приводному зусиллі електроприводу візка є мінімальним. В кінці розгону або гальмування переміщення та швидкості візка і вантажу зрівняються, а це означає, що коливання вантажу будуть усунені. На фіг. 1 представлені графіки зміни переміщень візка x1 і вантажу х2, на фіг. 2 - графіки зміни швидкостей візка Õ1 і вантажу Õ2 , на фіг. 3 - графік зміни приводного зусилля, що діє на візок (всі представлені графіки побудовані за умов H = 1м/с, L= 5м, m2 = 2000кг, m1 = 500кг, W = 50H). Штриховими лініями на фігурах зображені кінематичні характеристики руху вантажу. Час, протягом якого візок розганяється до номінальної швидкості, або гальмується з номінальної швидкості до зупинки, визначається за формулою: н F 2 g m1 m2 t1 4Lm2 2 3 gt1 2 g m1 m2 t1 cos 2 t t1 W, (19) UA (11) 91263 (13) C2 де н - номінальна швидкість вантажного візка, м/с; g - прискорення вільного падіння, м/с2; m1 - приведена до поступального руху маса візка, кг; m2 - маса вантажу, кг; t - поточний час, с; t1 - час перехідного режиму руху візка, с; L - довжина гнучкого підвісу, м; W - гальмуюче зусилля опору переміщенню візка, Н. 3 t1 = 3 4 iLm2 , F,~ W 91263 (1) ia o м/с; де t1 – час перехідного режиму руху візка, с; H – номінальна швидкість вантажного візка, m2 – мaса вантажу, кг; m1 – приведена до поступального руху маса візка, кг; L – довжина гнучкого підвісу, м; Fmax – максимальне приводне зусилля електроприводу візка, Н; W - гальмуюче зусилля опору переміщенню візка, Н. Цей час є найменшим з усіх можливих, оскільки зусилля приводу візка є максимальним. Максимальне зусилля буде діяти на візок на початку та в кінці перехідного режиму руху. 4 Для зменшення динамічних навантажень, які діють на кран необхідно забезпечити плавний характер зміни в часі приводного зусилля, яке діє на і візок. Функція зміни приводного зусилля описується таким виразом: 2 i g(m1 m2 )t1 ( 4Lm2 F= 2 2 g(m1 m2 )t1 ) cos( 3 gt1 2 ) t1 W , (2) g - прискорення вільного падіння, м/с2.| Таким чином коливання вантажу усуваються протягом перехідних режимів руху візка, крім того плавний характер зміни приводного зусилля значно зменшує динамічні навантаження на кранову металоконструкцію, механічні передачі та дозволяє працювати електроприводу візка в менш напруженому режимі. 5 Комп’ютерна верстка В. Мацело 91263 6 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of control of crane carriage with load on flexible suspension
Автори англійськоюLoveikin Viacheslav Serhiiovych, Romasevych Yurii Oleksandrovych
Назва патенту російськоюСпособ управления крановой тележкой с грузом на гибком подвесе
Автори російськоюЛовейкин Вячеслав Сергеевич, Ромасевич Юрий Александрович
МПК / Мітки
МПК: B66C 13/04, B66C 13/22
Мітки: спосіб, керування, візком, гнучкому, крановим, вантажем, підвісі
Код посилання
<a href="https://ua.patents.su/3-91263-sposib-keruvannya-kranovim-vizkom-z-vantazhem-na-gnuchkomu-pidvisi.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування крановим візком з вантажем на гнучкому підвісі</a>
Пристрій для керування приводом візка з вантажем на гнучкому підвісі
Номер патенту: 28823
Опубліковано: 25.12.2007
Автори: Ловейкін Вячеслав Сергійович, Ярошенко Володимир Федорович, Ромасевич Юрій Олександрович
МПК: B66C 13/04
Мітки: візка, вантажем, підвісі, пристрій, керування, приводом, гнучкому
Формула / Реферат:
Пристрій для керування приводом візка з вантажем на гнучкому підвісі, що містить датчик довжини підвісу, блок пам'яті, компаратор, блок пам'яті, який відрізняється тим, що пристрій додатково обладнаний арифметичним блоком, на входи якого підключені блок формування маси візка, датчик довжини гнучкого підвісу, датчик швидкості візка та підключений через аналого-цифровий перетворювач датчик маси вантажу, при цьому вихід арифметичного пристрою...
Спосіб керування механізмом переміщення кранового візка
Номер патенту: 87236
Опубліковано: 25.06.2009
Автори: Ромасевич Юрій Олександрович, Ловейкін Андрій В'ячеславович, Ловейкін Вячеслав Сергійович
МПК: B66C 13/04, B66C 13/22
Мітки: кранового, керування, механізмом, переміщення, візка, спосіб
Формула / Реферат:
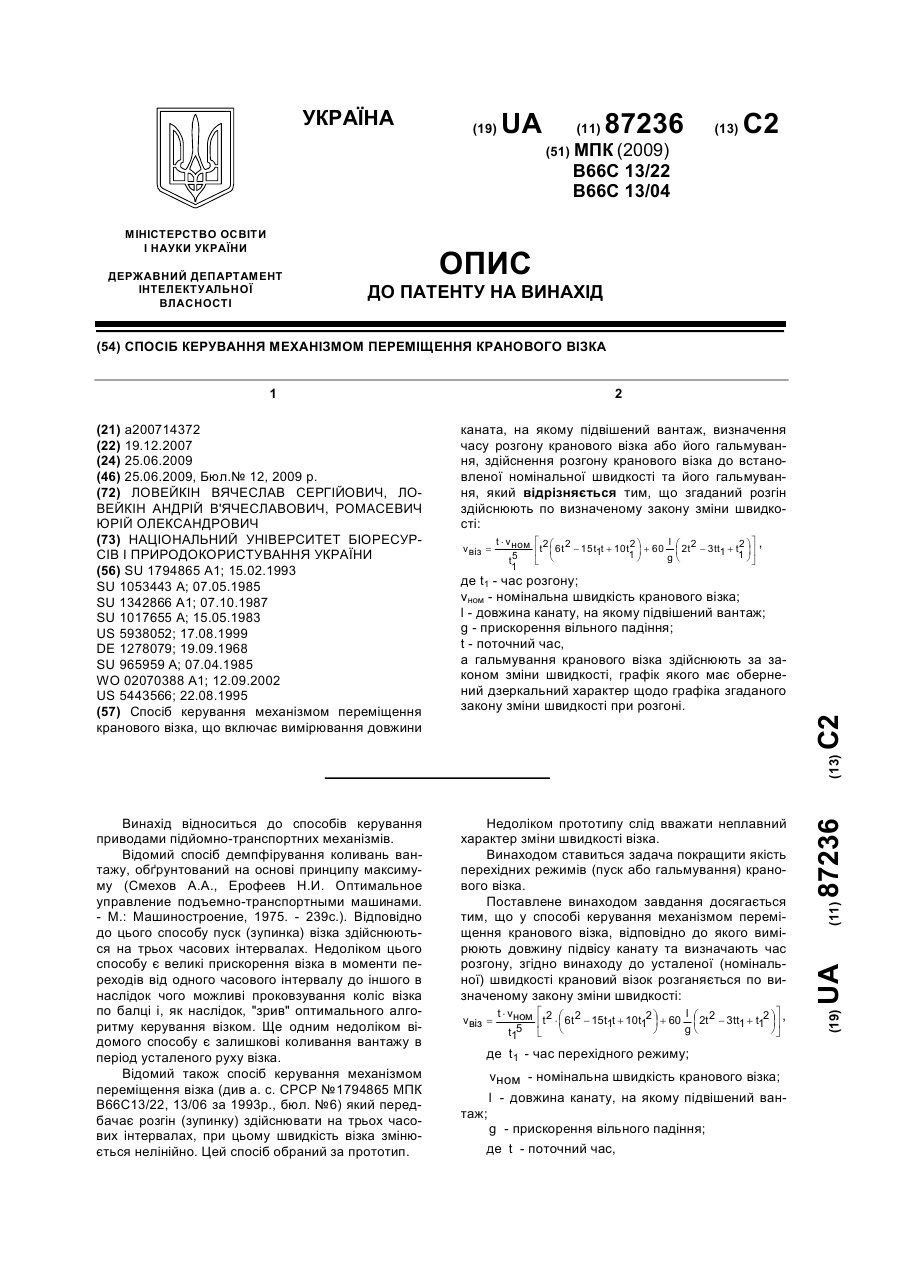
Спосіб керування механізмом переміщення кранового візка, що включає вимірювання довжини каната, на якому підвішений вантаж, визначення часу розгону кранового візка або його гальмування, здійснення розгону кранового візка до встановленої номінальної швидкості та його гальмування, який відрізняється тим, що згаданий розгін здійснюють по визначеному закону зміни швидкості:
Пристрій для керування приводом механізму переміщення візка крана
Номер патенту: 50540
Опубліковано: 10.06.2010
Автори: Ловейкін Вячеслав Сергійович, Ромасевич Юрій Олександрович
МПК: B66C 13/00
Мітки: переміщення, механізму, керування, приводом, візка, крана, пристрій
Формула / Реферат:
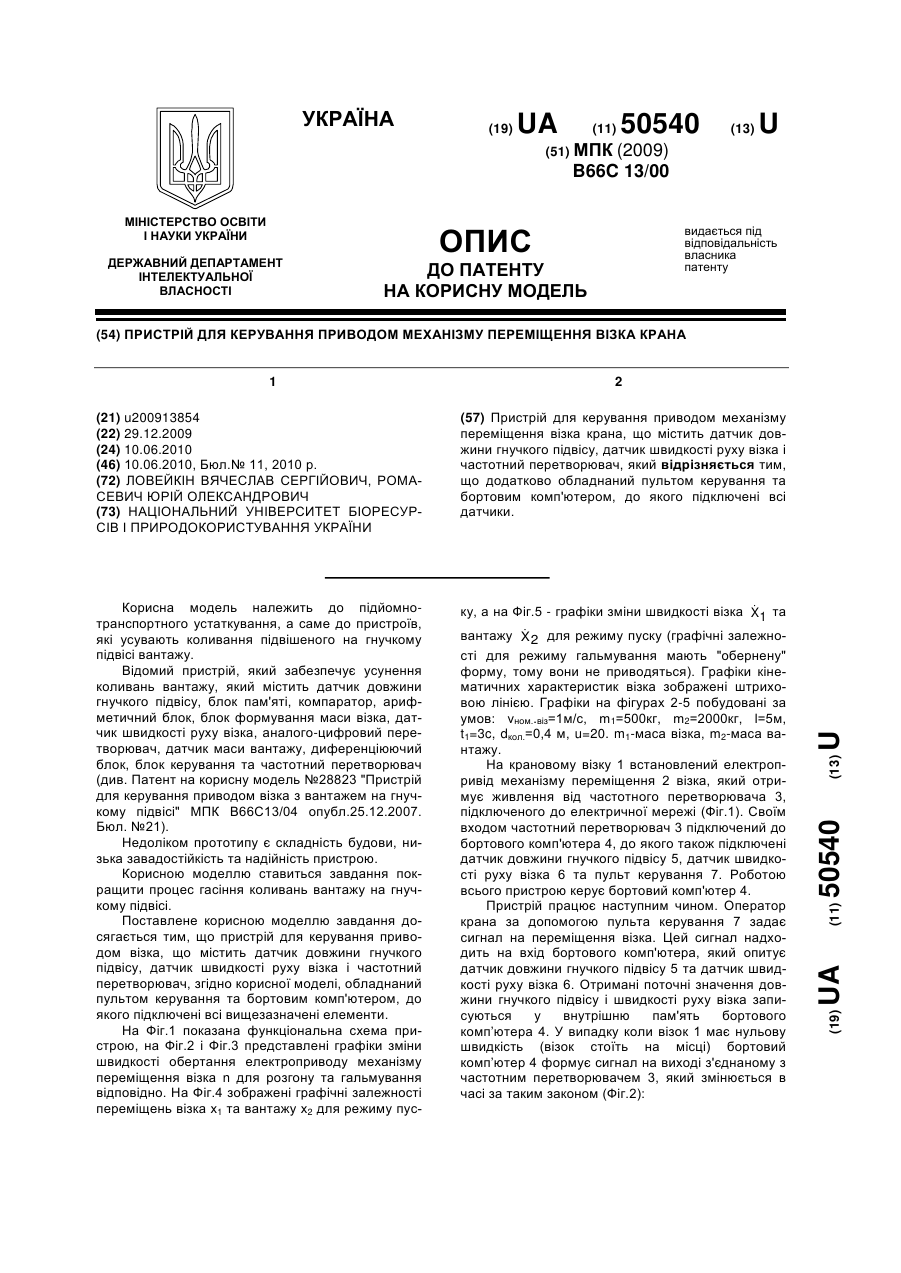
Пристрій для керування приводом механізму переміщення візка крана, що містить датчик довжини гнучкого підвісу, датчик швидкості руху візка і частотний перетворювач, який відрізняється тим, що додатково обладнаний пультом керування та бортовим комп'ютером, до якого підключені всі датчики.
Пристрій керування візком фронтальної дощувальної машини
Номер патенту: 44684
Опубліковано: 15.03.2002
Автор: Мельников Володимир Гаврилович
МПК: A01G 25/16
Мітки: дощувальної, пристрій, фронтально, керування, машини, візком
Формула / Реферат:
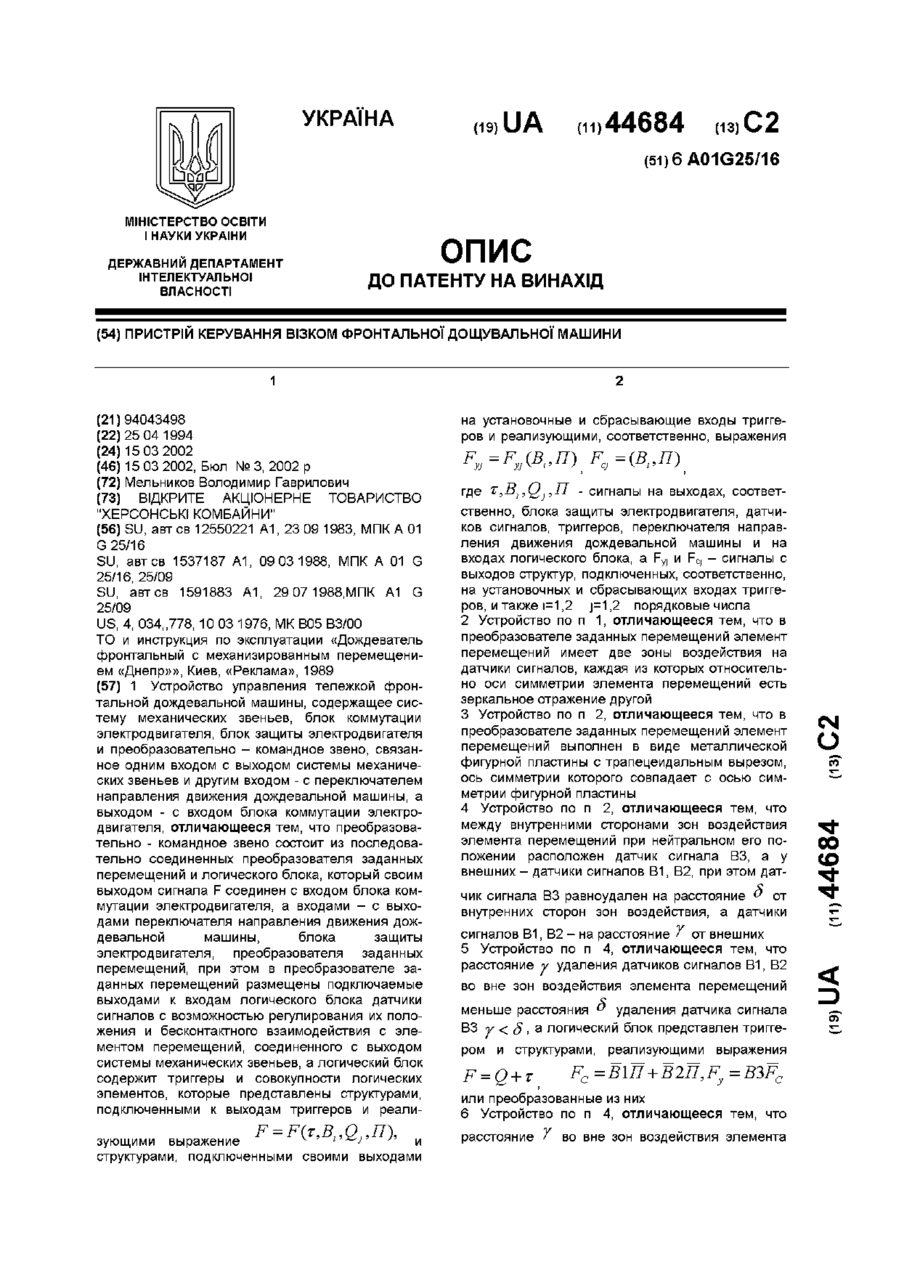
1. Устройство управления тележкой фронтальной дождевальной машины, содержащее систему механических звеньев, блок коммутации электродвигателя, блок защиты электродвигателя и преобразовательно – командное звено, связанное одним входом с выходом системы механических звеньев и другим входом - с переключателем направления движения дождевальной машины, а выходом - с входом блока коммутации электродвигателя, отличающееся тем, что преобразовательно...
Стенд для визначення пружнодисипативних характеристик силових зв’язків кузова з візком залізничного транспортного засобу
Номер патенту: 67224
Опубліковано: 15.06.2004
Автори: Сергієнко Микола Іванович, Могила Валентин Іванович, Кашура Олександр Леонідович, Басов Генадій Григорьйович, Гундарь Володимир Петрович, Найш Наум Михайлович, Попов Сергій Валерійович, Горбунов Микола Іванович
МПК: G01M 17/08
Мітки: стенд, пружнодисипативних, засобу, визначення, залізничного, транспортного, характеристик, зв'язків, кузова, силових, візком
Формула / Реферат:
Стенд для визначення пружнодисипативных характеристик силових зв'язків кузова з візком залізничного транспортного засобу, що містить нерухому основу з встановленими на ній опорами кочення, нижню і верхню рухомі рами, встановлені на нерухомій основі стійки з механізмами поперечних і кутових переміщень та вертикальних навантажень, що працюють від гідросистеми стенда, з'єднання кузова з випробуваним візком містить опори і шворневий вузол, який...
Попередній патент: Спосіб визначення витрати транспортованого газу
Наступний патент: Термопластичні термічно розширювані мікросфери, спосіб їх одержання, застосування, водна суспензія, що їх містить, та спосіб одержання паперу
Випадковий патент: Пристрій для безперервного фільтрування з поворотними секціями