Пристрій для керування приводом візка з вантажем на гнучкому підвісі
Номер патенту: 28823
Опубліковано: 25.12.2007
Автори: Ярошенко Володимир Федорович, Ловейкін Вячеслав Сергійович, Ромасевич Юрій Олександрович
Формула / Реферат
Пристрій для керування приводом візка з вантажем на гнучкому підвісі, що містить датчик довжини підвісу, блок пам'яті, компаратор, блок пам'яті, який відрізняється тим, що пристрій додатково обладнаний арифметичним блоком, на входи якого підключені блок формування маси візка, датчик довжини гнучкого підвісу, датчик швидкості візка та підключений через аналого-цифровий перетворювач датчик маси вантажу, при цьому вихід арифметичного пристрою підключений до блока пам'яті, який виходом підключений до першого входу компаратора, на другий вхід якого через диференціювальний блок підключений датчик швидкості візка, вихід компаратора з'єднаний з входом частотного перетворювача, який керує роботою двигуна візка, при цьому роботою всієї схеми керує блок керування, підключений до частотного перетворювача та блока пам'яті.
Текст
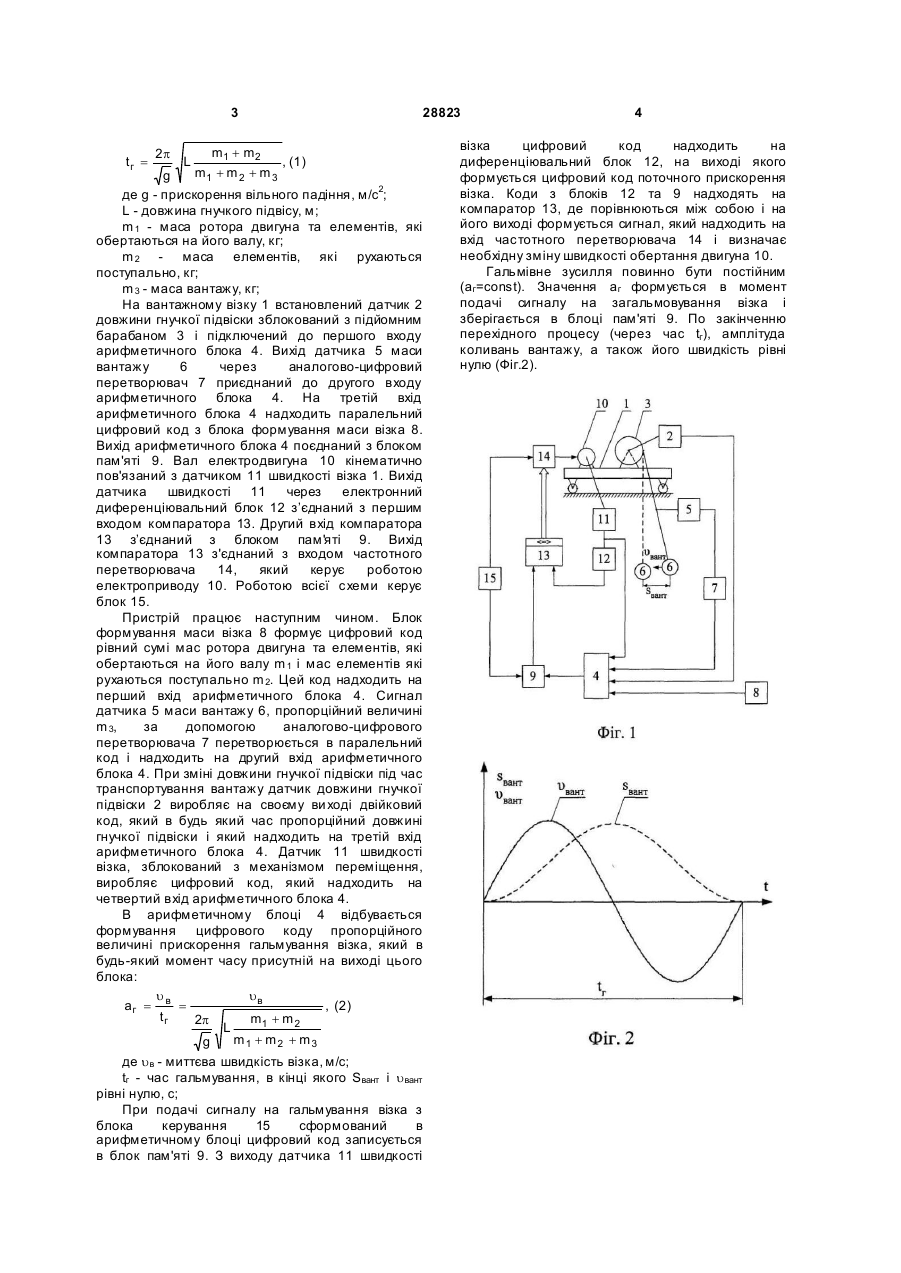
Пристрій для керування приводом візка з вантажем на гнучкому підвісі, що містить датчик довжини підвісу, блок пам'яті, компаратор, блок пам'яті, який відрізняється тим, що пристрій додатково обладнаний арифметичним блоком, на 3 tг = 2p L m1 + m2 , (1) m1 + m 2 + m 3 28823 g де g - прискорення вільного падіння, м/с2; L - довжина гнучкого підвісу, м; m 1 - маса ротора двигуна та елементів, які обертаються на його валу, кг; m 2 - маса елементів, які рухаються поступально, кг; m 3 - маса вантажу, кг; На вантажному візку 1 встановлений датчик 2 довжини гнучкої підвіски зблокований з підйомним барабаном 3 і підключений до першого входу арифметичного блока 4. Вихід датчика 5 маси вантажу 6 через аналогово-цифровий перетворювач 7 приєднаний до другого входу арифметичного блока 4. На третій вхід арифметичного блока 4 надходить паралельний цифровий код з блока формування маси візка 8. Вихід арифметичного блока 4 поєднаний з блоком пам'яті 9. Вал електродвигуна 10 кінематично пов'язаний з датчиком 11 швидкості візка 1. Вихід датчика швидкості 11 через електронний диференціювальний блок 12 з’єднаний з першим входом компаратора 13. Другий вхід компаратора 13 з’єднаний з блоком пам'я ті 9. Вихід компаратора 13 з'єднаний з входом частотного перетворювача 14, який керує роботою електроприводу 10. Роботою всієї схеми керує блок 15. Пристрій працює наступним чином. Блок формування маси візка 8 формує цифровий код рівний сумі мас ротора двигуна та елементів, які обертаються на його валу m 1 і мас елементів які рухаються поступально m 2. Цей код надходить на перший вхід арифметичного блока 4. Сигнал датчика 5 маси вантажу 6, пропорційний величині m 3, за допомогою аналогово-цифрового перетворювача 7 перетворюється в паралельний код і надходить на другий вхід арифметичного блока 4. При зміні довжини гнучкої підвіски під час транспортування вантажу датчик довжини гнучкої підвіски 2 виробляє на своєму ви ході двійковий код, який в будь який час пропорційний довжині гнучкої підвіски і який надходить на третій вхід арифметичного блока 4. Датчик 11 швидкості візка, зблокований з механізмом переміщення, виробляє цифровий код, який надходить на четвертий вхід арифметичного блока 4. В арифметичному блоці 4 відбувається формування цифрового коду пропорційного величині прискорення гальмування візка, який в будь-який момент часу присутній на виході цього блока: u uв aг = в = , (2) tг m1 + m 2 2p L m1 + m2 + m3 g де uв - миттєва швидкість візка, м/с; tг - час гальмування, в кінці якого Sвант і uвант рівні нулю, с; При подачі сигналу на гальмування візка з блока керування 15 сформований в арифметичному блоці цифровий код записується в блок пам'яті 9. З виходу датчика 11 швидкості 4 візка цифровий код надходить на диференціювальний блок 12, на виході якого формується цифровий код поточного прискорення візка. Коди з блоків 12 та 9 надходять на компаратор 13, де порівнюються між собою і на його виході формується сигнал, який надходить на вхід частотного перетворювача 14 і визначає необхідну зміну швидкості обертання двигуна 10. Гальмівне зусилля повинно бути постійним (aг=const). Значення а г формується в момент подачі сигналу на загальмовування візка і зберігається в блоці пам'яті 9. По закінченню перехідного процесу (через час tг), амплітуда коливань вантажу, а також його швидкість рівні нулю (Фіг.2).
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for control of drive of trolley with load on the flexible suspension
Автори англійськоюLoveikin Viacheslav Serhiiovych, Yaroshenko Volodymyr Fedorovych, Romasevych Yurii Oleksandrovych
Назва патенту російськоюУстройство для управления приводом тележки с грузом на гибком подвесе
Автори російськоюЛовейкин Вячеслав Сергеевич, Ярошенко Владимир Федорович, Ромасевич Юрий Александрович
МПК / Мітки
МПК: B66C 13/04
Мітки: гнучкому, керування, пристрій, вантажем, приводом, підвісі, візка
Код посилання
<a href="https://ua.patents.su/2-28823-pristrijj-dlya-keruvannya-privodom-vizka-z-vantazhem-na-gnuchkomu-pidvisi.html" target="_blank" rel="follow" title="База патентів України">Пристрій для керування приводом візка з вантажем на гнучкому підвісі</a>
Пристрій для керування гальмуванням візка крана
Номер патенту: 27443
Опубліковано: 25.10.2007
Автори: Ловейкін Вячеслав Сергійович, Ромасевич Юрій Олександрович, Ярошенко Володимир Федорович
МПК: B66C 13/18
Мітки: керування, пристрій, візка, крана, гальмуванням
Формула / Реферат:
Пристрій для керування гальмуванням візка крана, що містить задатчик, який своїми виходами підключений до входів елементів порівняння, а їх виходи через ключові елементи з'єднані з частотним перетворювачем, інтегратор, шляховий вимикач та датчик швидкості, який відрізняється тим, що пристрій побудований по схемі з проміжною ланкою постійного струму, інтегратор підключений до датчика швидкості, а виходом - до другого елемента порівняння, крім...
Пристрій для керування приводом транспортного механізму з гнучкою підвіскою вантажу
Номер патенту: 54172
Опубліковано: 17.02.2003
Автор: Холодний Валерій Іванович
МПК: B66C 13/04
Мітки: вантажу, приводом, пристрій, гнучкою, транспортного, підвіскою, керування, механізму
Формула / Реферат:
Пристрій для керування приводом транспортного механізму з гнучкою підвіскою вантажу, який містить послідовно з'єднані задатчик швидкості, задатчик інтенсивності прискорення (гальмування), перший суматор, блок порівняння і виконуючий блок, який діє на транспортний механізм, датчик швидкості якого підключений до одного із входів блока порівняння, а також послідовно з'єднані датчик довжини підвіски вантажу , блок добування квадратного кореня,...
Пристрій для керування приводом виконавчого органа
Номер патенту: 43759
Опубліковано: 15.06.2005
Автори: Сіренко Іван Федотович, Колодяжний Валерій Васильович, Долгополов Сергій Гаврилович, Золотарьов Олексій Михайлович, Пітірімов Олександр Вікторович, Волчков Іван Іванович, Дудко Павло Григорович, Бантюков Євген Миколайович, Коток Валерій Борисович, Виродов Валерій Олександрович
МПК: H01H 47/00, G05B 11/32
Мітки: органа, виконавчого, пристрій, приводом, керування
Формула / Реферат:
Пристрій для керування приводом виконавчого органа, що містить блок формування команд, блок керування, до третіх входів якого підключені виходи блока формування команд, блок індикації, другі входи якого з'єднані з третіми виходами блока керування, блок увімкнення приводу, який відрізняється тим, що в нього уведені формувач імпульсів, блок настроювання, блок контролю витоку, перший, другий і третій ключі, блок захисту від короткого замикання,...
Пристрій для керування приводом запірного органа
Номер патенту: 69022
Опубліковано: 16.08.2004
Автори: Лопатін Володимир Олексійович, Коломєєв Валентин Миколайович, Лінчевський Михайло Петрович, Бантюков Євген Миколайович, Колодяжний Валерій Васильович, Золотарьов Олексій Михайлович, Саркісов Володимир Олександрович, Коток Валерій Борисович, Волчков Іван Іванович, Пітірімов Олександр Вікторович, Старовойтов Володимир Гербертович
МПК: G05B 11/01, H01H 47/00
Мітки: керування, запірного, органа, пристрій, приводом
Формула / Реферат:
Пристрій для керування приводом запірного органа, що містить формувач імпульсів, блок контролю витоку, блок місцевого керування, запам'ятовуючий пристрій, блок керування, до других входів якого підключені виходи формувача імпульсів, до третього - вихід блока контролю витоку, до четвертих - виходи блока місцевого керування, до шостих - входи-виходи запам'ятовуючого пристрою, перший, другий і третій ключі, вхід кожного з яких з'єднаний з...
Пристрій автоматичного керування приводом подачі електрода-інструмента в електроерозійних станках
Номер патенту: 16288
Опубліковано: 29.08.1997
Автори: Васильєв Юрій Вікторович, Отто Марк Шмульович, Беслік Олексій Іванович, Полуянов Володимир Сергійович
МПК: B23H 7/00
Мітки: подачі, станках, автоматичного, приводом, електроерозійних, пристрій, керування, електрода-інструмента
Формула / Реферат:
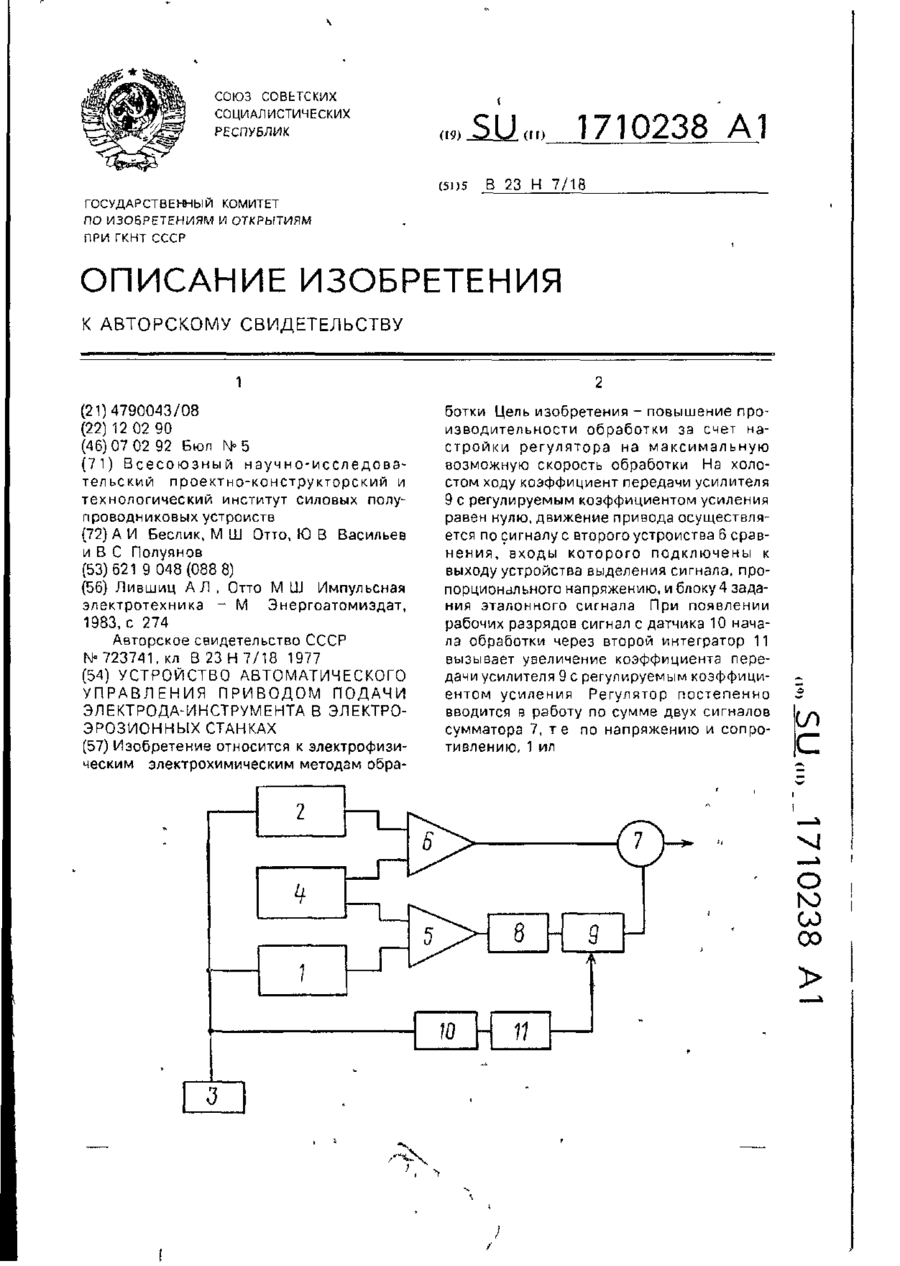
Устройство автоматического управления приводом подачи электрода-инструмента в электроэрозионных станках, содержащее устройство выделения сигнала, пропорционального сопротивлению эрозионного промежутка, блок задания эталонного сигнала, подключенный к устройству сравнения, усилитель, привод подачи, отличающееся тем, что, с целью повышения производительности обработки, в него введены устройство выделения сигнала, пропорционального напряжению на...
Попередній патент: Шпиндельний вузол важкого токарного верстата з додатковою гідростатичною опорою
Наступний патент: Пристрій керування коливаннями при точінні
Випадковий патент: Термоконтейнер