Ромасевич Юрій Олександрович
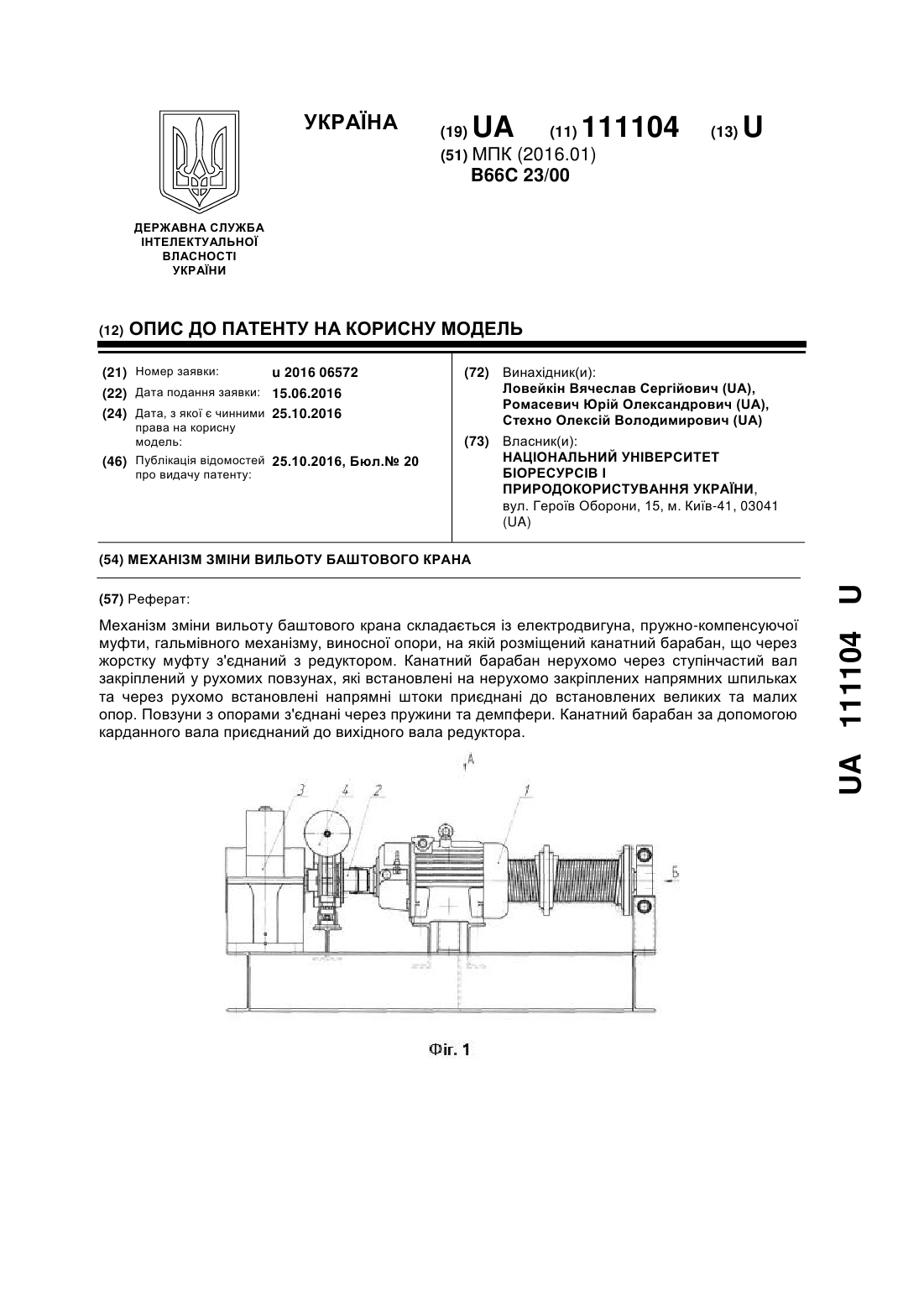
Механізм зміни вильоту баштового крана
Номер патенту: 111104
Опубліковано: 25.10.2016
Автори: Ромасевич Юрій Олександрович, Ловейкін Вячеслав Сергійович, Стехно Олексій Володимирович
МПК: B66C 23/00
Мітки: крана, механізм, баштового, вильоту, зміни
Формула / Реферат:
Механізм зміни вильоту баштового крана, що складається із електродвигуна, пружно-компенсуючої муфти, гальмівного механізму, виносної опори, на якій розміщений канатний барабан, що через жорстку муфту з'єднаний з редуктором, який відрізняється тим, що канатний барабан нерухомо через ступінчастий вал закріплений у рухомих повзунах, які встановлені на нерухомо закріплених напрямних шпильках та через рухомо встановлені напрямні штоки приєднані...
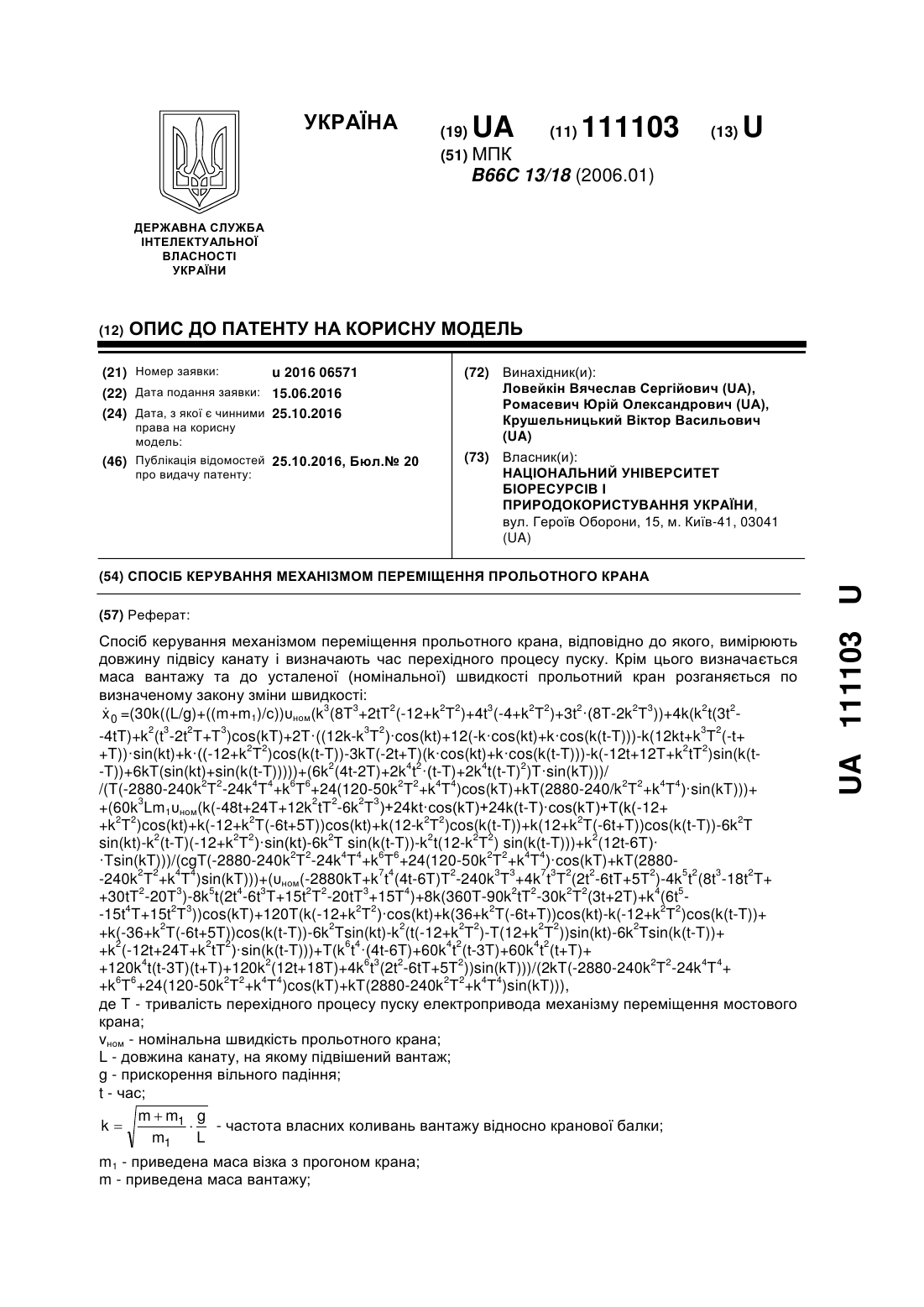
Спосіб керування механізмом переміщення прольотного крана
Номер патенту: 111103
Опубліковано: 25.10.2016
Автори: Крушельницький Віктор Васильович, Ромасевич Юрій Олександрович, Ловейкін Вячеслав Сергійович
МПК: B66C 13/18
Мітки: механізмом, спосіб, керування, крана, переміщення, прольотного
Формула / Реферат:
Спосіб керування механізмом переміщення прольотного крана, відповідно до якого, вимірюють довжину підвісу канату і визначають час перехідного процесу пуску, який відрізняється тим, що визначається маса вантажу та до усталеної (номінальної) швидкості прольотний кран розганяється по визначеному закону зміни...
Спосіб керування приводами маніпуляційної системи промислового робота
Номер патенту: 104215
Опубліковано: 10.01.2014
Автори: Ловейкін Вячеслав Сергійович, Ромасевич Юрій Олександрович
МПК: B25J 9/00, G05B 19/00
Мітки: керування, промислового, спосіб, робота, маніпуляційної, приводами, системі
Формула / Реферат:
Спосіб керування приводами маніпуляційної системи промислового робота, згідно з яким змінюють швидкості приводів поступального руху та обертального руху робота, причому так, що максимальні значення вказаних швидкостей поступального та обертального руху, відповідно
Пристрій для керування механізмом підйому вантажу прольотного крана

Номер патенту: 85764
Опубліковано: 25.11.2013
Автори: Ловейкін Вячеслав Сергійович, Годун Василь Анатолійович, Ромасевич Юрій Олександрович
МПК: B66C 13/22
Мітки: пристрій, керування, крана, вантажу, механізмом, підйому, прольотного
Формула / Реферат:
Пристрій для керування механізмом підйому вантажу прольотного крана, що містить датчик стану каната, задатчик, мікроконтроллер, на входи якого підключені задатчик та датчик стану каната, який відрізняється тим, що додатково обладнаний перетворювачем частоти, який інформаційним каналом підключений до мікроконтроллера і живить асинхронний короткозамкнений двигун механізму підйому вантажу.
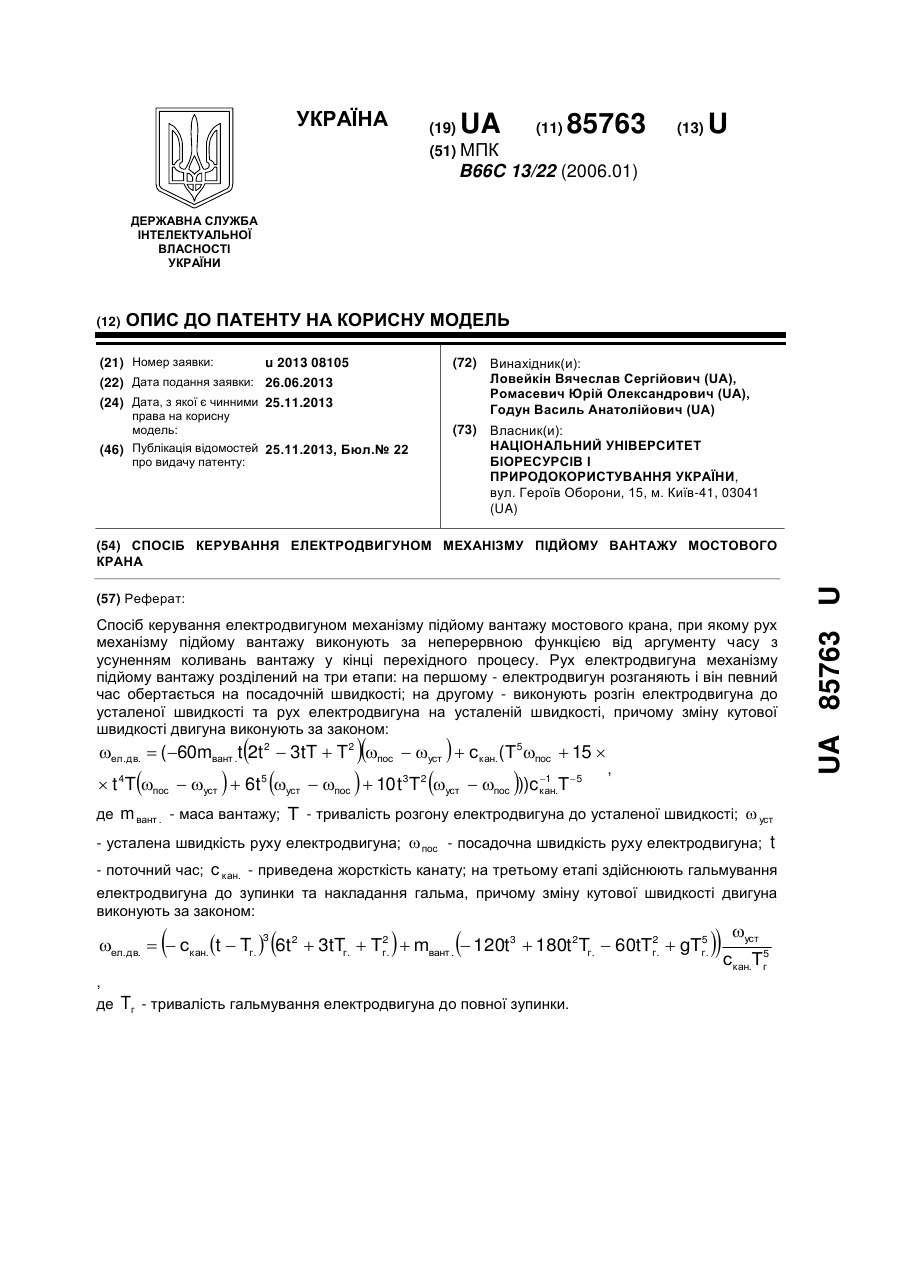
Спосіб керування електродвигуном механізму підйому вантажу мостового крана
Номер патенту: 85763
Опубліковано: 25.11.2013
Автори: Ловейкін Вячеслав Сергійович, Ромасевич Юрій Олександрович, Годун Василь Анатолійович
МПК: B66C 13/22
Мітки: механізму, спосіб, крана, підйому, електродвигуном, керування, мостового, вантажу
Формула / Реферат:
Спосіб керування електродвигуном механізму підйому вантажу мостового крана, при якому рух механізму підйому вантажу виконують за неперервною функцією від аргументу часу з усуненням коливань вантажу у кінці перехідного процесу, який відрізняється тим, що рух електродвигуна механізму підйому вантажу розділений на три етапи: на першому - електродвигун розганяють і він певний час обертається на посадочній швидкості; на другому - виконують розгін...
Спосіб усунення коливань вантажу, закріпленого на гнучкому підвісі, при роботі кранового візка з непередбачуваними зовнішніми впливами
Номер патенту: 102280
Опубліковано: 25.06.2013
Автори: Ромасевич Юрій Олександрович, Ловейкін Вячеслав Сергійович
МПК: B66C 13/06, B66C 13/20
Мітки: зовнішніми, усунення, непередбачуваними, візка, коливань, кранового, роботи, впливами, спосіб, гнучкому, підвісі, вантажу, закріпленого
Формула / Реферат:
Спосіб усунення коливань вантажу, закріпленого на гнучкому підвісі, при якому виконують керування рухом кранового візка з вантажем на гнучкому підвісі, що включає вимірювання довжини гнучкого підвісу та маси вантажу, який відрізняється тим, що при гальмуванні кранового візка величину приводного зусилля, яка на нього діє, встановлюють через визначений проміжок часу з урахуванням першої, другої та третьої похідної за часом положення центру мас...
Спосіб керування рухом промислового робота

Номер патенту: 101651
Опубліковано: 25.04.2013
Автори: Ловейкін Вячеслав Сергійович, Ромасевич Юрій Олександрович
МПК: B25J 9/00, C05B 19/00
Мітки: промислового, робота, керування, спосіб, рухом
Формула / Реферат:
Спосіб керування рухом промислового робота, при якому розгін і гальмування ланки робота здійснюють при максимальному приводному моменті, який відрізняється тим, що розгін і гальмування ланки робота здійснюють за наступним дискретним законом, який описується поліноміальною залежністю від аргументу часу
Спосіб налаштування пропорційно-інтегрального регулятора для мехатронних систем
Номер патенту: 75909
Опубліковано: 25.12.2012
Автори: Ромасевич Юрій Олександрович, Ловейкін Вячеслав Сергійович
МПК: G05B 11/36
Мітки: мехатронних, пропорційно-інтегрального, налаштування, систем, регулятора, спосіб
Формула / Реферат:
Спосіб налаштування пропорційно-інтегрального регулятора для мехатронних систем, що мінімізує інтегральний тип критерію якості регулювання, який відрізняється тим, що встановлюють вагові коефіцієнти та із врахуванням вимог, які ставляться до якості регулювання руху мехатронної системи; надалі задають...
Спосіб керування приводами маніпуляційної системи промислового робота
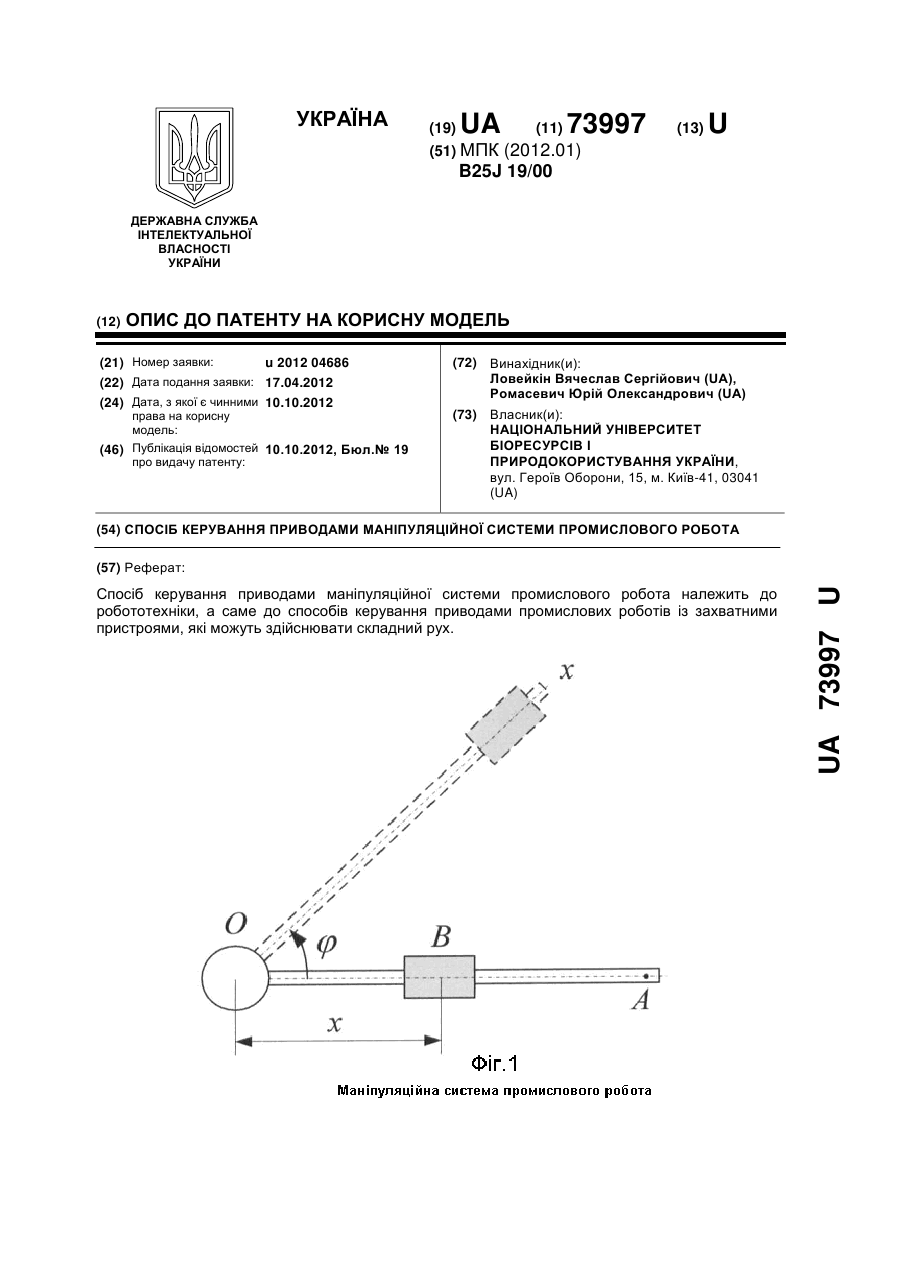
Номер патенту: 73997
Опубліковано: 10.10.2012
Автори: Ромасевич Юрій Олександрович, Ловейкін Вячеслав Сергійович
МПК: B25J 19/00
Мітки: системі, промислового, маніпуляційної, спосіб, приводами, робота, керування
Формула / Реферат:
Спосіб керування приводами маніпуляційної системи промислового робота, що включає зміну швидкостей приводів поступального та обертального руху робота, причому максимальні значення вказаних швидкостей не перевищують наперед встановлених значень, який відрізняється тим, що швидкості привідних механізмів робота змінюють за оптимальними законами, які описують дискретними функціями часу:- для приводу поступального руху
Спосіб керування режимами пуску та гальмування крана з траверсною підвіскою вантажу
Номер патенту: 68241
Опубліковано: 26.03.2012
Автори: Ромасевич Юрій Олександрович, Ловейкін Вячеслав Сергійович
МПК: B66C 13/06
Мітки: керування, підвіскою, вантажу, пуску, гальмування, спосіб, режимами, крана, траверсною
Формула / Реферат:
Спосіб керування режимами пуску та гальмування крана з траверсною підвіскою вантажу, який відрізняється тим, що протягом пуску та гальмування крана задається приводне (гальмівне) зусилля руху крана, яке змінюється за поліноміальною залежністю від аргументу часу, причому процес гальмування відрізняється від пуску тим, що динамічна складова зусилля входить у вказану поліноміальну залежність зі знаком "-": для пуску Fпуск = Fдин.+W,...
Пристрій для усунення коливань вантажу, закріпленого на гнучкому підвісі до кранового візка
Номер патенту: 94512
Опубліковано: 10.05.2011
Автори: Ромасевич Юрій Олександрович, Ловейкін Вячеслав Сергійович
МПК: B66C 13/06, B66C 13/22
Мітки: підвісі, коливань, закріпленого, гнучкому, вантажу, візка, пристрій, кранового, усунення
Формула / Реферат:
Пристрій для усунення коливань вантажу, закріпленого на гнучкому підвісі до кранового візка, що містить пульт керування оператора крана, силовий перетворювач, електропривод механізму переміщення візка, датчик довжини гнучкого підвісу, який відрізняється тим, що обладнаний датчиком маси вантажу та мікроконтролерною системою, яка першим цифровим входом сполучена з датчиком довжини гнучкого підвісу, другим - з пультом керування оператора крана,...
Спосіб зменшення коливань вантажу, закріпленого на гнучкому підвісі
Номер патенту: 94511
Опубліковано: 10.05.2011
Автори: Ромасевич Юрій Олександрович, Ловейкін Вячеслав Сергійович
МПК: B66C 13/06, B66C 13/22
Мітки: вантажу, коливань, підвісі, закріпленого, зменшення, спосіб, гнучкому
Формула / Реферат:
Спосіб зменшення коливань вантажу, закріпленого на гнучкому підвісі, що включає керування рухом візка для усунення коливань вантажу протягом перехідних режимів руху, який відрізняється тим, що протягом розгону задають швидкість руху візка, яка змінюється за законом:,де - прискорення вільного...
Спосіб керування вантажним візком з вантажем на гнучкому підвісі
Номер патенту: 92617
Опубліковано: 25.11.2010
Автори: Ловейкін Вячеслав Сергійович, Ромасевич Юрій Олександрович
МПК: B66C 13/00, B66C 13/22
Мітки: вантажем, візком, гнучкому, вантажним, керування, підвісі, спосіб
Формула / Реферат:
Спосіб керування вантажним візком з вантажем на гнучкому підвісі, що включає вимірювання довжини підвісу вантажозахватного пристрою, розгін вантажного візка з маневруванням для гасіння коливань вантажозахватного органу до досягнення номінальної швидкості з прискоренням , яке не перевищує максимально допустимого значення, який відрізняється тим, що додатково вимірюють масу вантажу, закріпленого на гнучкому підвісі, визначають час розгону, при...
Спосіб керування крановим візком з вантажем на гнучкому підвісі
Номер патенту: 91263
Опубліковано: 12.07.2010
Автори: Ловейкін Вячеслав Сергійович, Ромасевич Юрій Олександрович
МПК: B66C 13/22, B66C 13/04
Мітки: спосіб, крановим, гнучкому, керування, вантажем, підвісі, візком
Формула / Реферат:
Спосіб керування крановим візком з вантажем на гнучкому підвісі, у якому на крановий візок діють з приводним зусиллям протягом перехідних режимів руху, який відрізняється тим, що приводне зусилля має плавний характер зміни в часі і описується виразом:,де nн - номінальна швидкість вантажного візка, м/с;g - прискорення вільного...
Пристрій для керування приводом механізму переміщення візка крана
Номер патенту: 50540
Опубліковано: 10.06.2010
Автори: Ромасевич Юрій Олександрович, Ловейкін Вячеслав Сергійович
МПК: B66C 13/00
Мітки: приводом, пристрій, керування, візка, механізму, переміщення, крана
Формула / Реферат:
Пристрій для керування приводом механізму переміщення візка крана, що містить датчик довжини гнучкого підвісу, датчик швидкості руху візка і частотний перетворювач, який відрізняється тим, що додатково обладнаний пультом керування та бортовим комп'ютером, до якого підключені всі датчики.
Спосіб керування механізмом переміщення кранового візка
Номер патенту: 87236
Опубліковано: 25.06.2009
Автори: Ловейкін Вячеслав Сергійович, Ловейкін Андрій В'ячеславович, Ромасевич Юрій Олександрович
МПК: B66C 13/22, B66C 13/04
Мітки: керування, візка, переміщення, кранового, механізмом, спосіб
Формула / Реферат:
Спосіб керування механізмом переміщення кранового візка, що включає вимірювання довжини каната, на якому підвішений вантаж, визначення часу розгону кранового візка або його гальмування, здійснення розгону кранового візка до встановленої номінальної швидкості та його гальмування, який відрізняється тим, що згаданий розгін здійснюють по визначеному закону зміни швидкості:
Пристрій для керування електроприводом механізму підйому прогінного крана
Номер патенту: 31547
Опубліковано: 10.04.2008
Автори: Ярошенко Володимир Федорович, Ловейкін Вячеслав Сергійович, Ромасевич Юрій Олександрович
МПК: B66C 13/22
Мітки: підйому, прогінного, керування, електроприводом, крана, пристрій, механізму
Формула / Реферат:
Пристрій для керування електроприводом механізму підйому прогінного крана, що містить датчик стану каната, задатчик, блок керування електроприводом механізму підйому вантажу, який відрізняється тим, що обладнаний датчиком довжини каната, який змонтований на канатному барабані і підключений до мікроконтролера, на другий вхід якого підключений задатчик, а на третій - датчик стану каната, причому до інформаційного виходу мікроконтролера...
Пристрій для визначення кінематичних параметрів кранового візка
Номер патенту: 31546
Опубліковано: 10.04.2008
Автори: Ловейкін Вячеслав Сергійович, Ромасевич Юрій Олександрович, Ярошенко Володимир Федорович
МПК: B66C 13/00
Мітки: пристрій, візка, кранового, кінематичних, параметрів, визначення
Формула / Реферат:
Пристрій для визначення кінематичних параметрів кранового візка, що містить герконові реле (чутливі елементи): крайнього лівого, крайнього правого і середнього положень, закріплені на кран-балці, і магніт, який встановлений на візку крана та взаємодіє з герконовими реле, який відрізняється тим, що обладнаний датчиком руху візка, який складається з датчика прямого та датчика зворотного руху візка, які підключені до блока визначення напрямку...
Пристрій для обмеження розгойдувань вантажу, підвішеного до візка крана
Номер патенту: 30454
Опубліковано: 25.02.2008
Автори: Ловейкін Вячеслав Сергійович, Ромасевич Юрій Олександрович, Ярошенко Володимир Федорович
МПК: B66C 13/04
Мітки: підвішеного, розгойдувань, візка, пристрій, обмеження, крана, вантажу
Формула / Реферат:
Пристрій для обмеження розгойдувань вантажу, підвішеного до візка крана, що містить електропривід візка, датчик ваги вантажу, регулятор швидкості візка, джерело постійної напруги, який відрізняється тим, що обладнаний датчиком довжини каната, який підключений до першого входу блока-формувача часу розгону візка, з можливістю надходження на його другий вхід сигналу від блока-формувача номінальної швидкості візка, таймером, приєднаним до блока...
Пристрій для керування приводом візка з вантажем на гнучкому підвісі
Номер патенту: 28823
Опубліковано: 25.12.2007
Автори: Ловейкін Вячеслав Сергійович, Ромасевич Юрій Олександрович, Ярошенко Володимир Федорович
МПК: B66C 13/04
Мітки: підвісі, вантажем, візка, пристрій, гнучкому, керування, приводом
Формула / Реферат:
Пристрій для керування приводом візка з вантажем на гнучкому підвісі, що містить датчик довжини підвісу, блок пам'яті, компаратор, блок пам'яті, який відрізняється тим, що пристрій додатково обладнаний арифметичним блоком, на входи якого підключені блок формування маси візка, датчик довжини гнучкого підвісу, датчик швидкості візка та підключений через аналого-цифровий перетворювач датчик маси вантажу, при цьому вихід арифметичного пристрою...
Пристрій для керування гальмуванням візка крана
Номер патенту: 27443
Опубліковано: 25.10.2007
Автори: Ромасевич Юрій Олександрович, Ярошенко Володимир Федорович, Ловейкін Вячеслав Сергійович
МПК: B66C 13/18
Мітки: керування, крана, пристрій, візка, гальмуванням
Формула / Реферат:
Пристрій для керування гальмуванням візка крана, що містить задатчик, який своїми виходами підключений до входів елементів порівняння, а їх виходи через ключові елементи з'єднані з частотним перетворювачем, інтегратор, шляховий вимикач та датчик швидкості, який відрізняється тим, що пристрій побудований по схемі з проміжною ланкою постійного струму, інтегратор підключений до датчика швидкості, а виходом - до другого елемента порівняння, крім...