Спосіб керування механізмом переміщення кранового візка
Номер патенту: 87236
Опубліковано: 25.06.2009
Автори: Ловейкін Вячеслав Сергійович, Ромасевич Юрій Олександрович, Ловейкін Андрій В'ячеславович
Формула / Реферат
Спосіб керування механізмом переміщення кранового візка, що включає вимірювання довжини каната, на якому підвішений вантаж, визначення часу розгону кранового візка або його гальмування, здійснення розгону кранового візка до встановленої номінальної швидкості та його гальмування, який відрізняється тим, що згаданий розгін здійснюють по визначеному закону зміни швидкості:
![]() ,
,
де t1 - час розгону;
vном - номінальна швидкість кранового візка;
l - довжина канату, на якому підвішений вантаж;
g - прискорення вільного падіння;
t - поточний час,
а гальмування кранового візка здійснюють за законом зміни швидкості, графік якого має обернений дзеркальний характер щодо графіка згаданого закону зміни швидкості при розгоні.
Текст
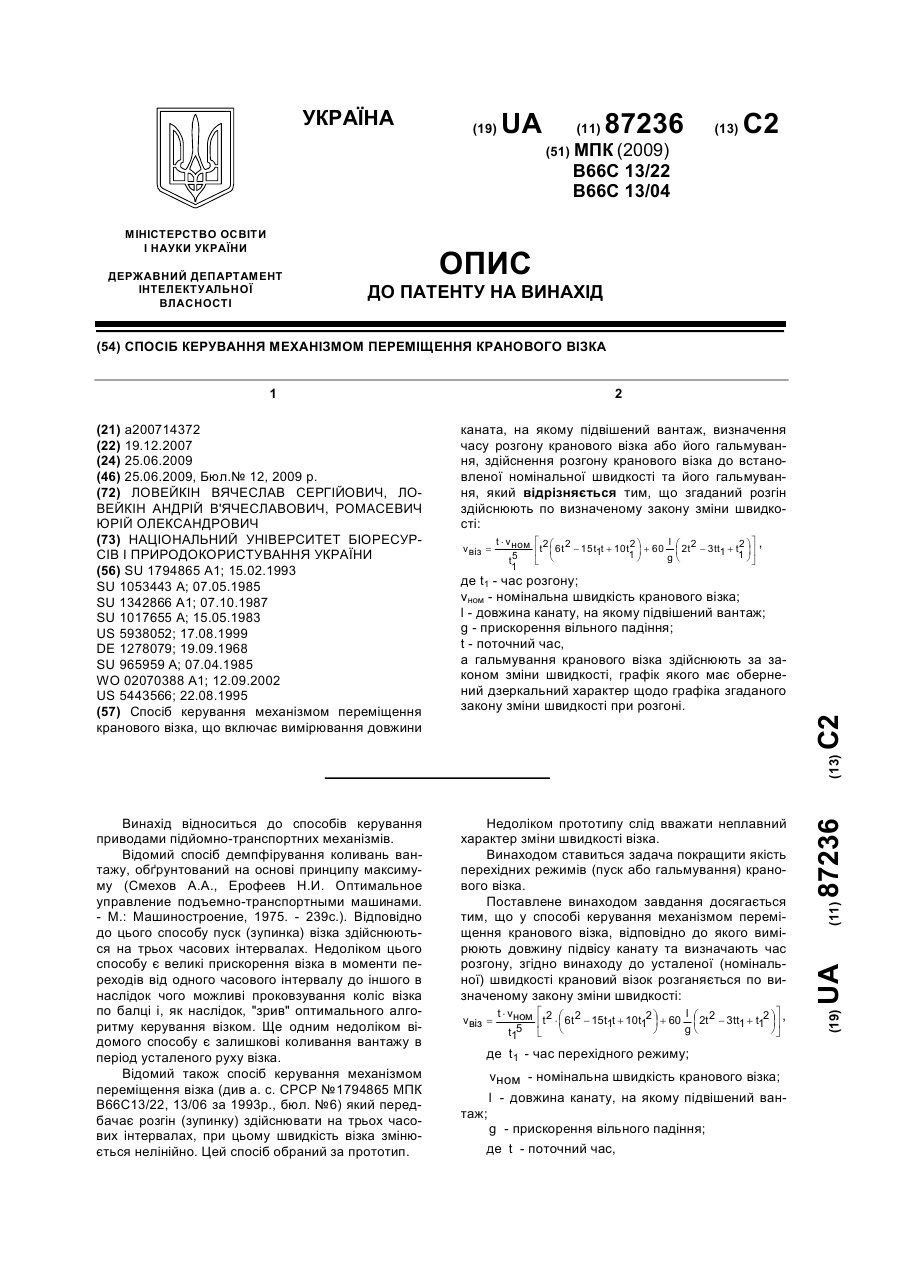
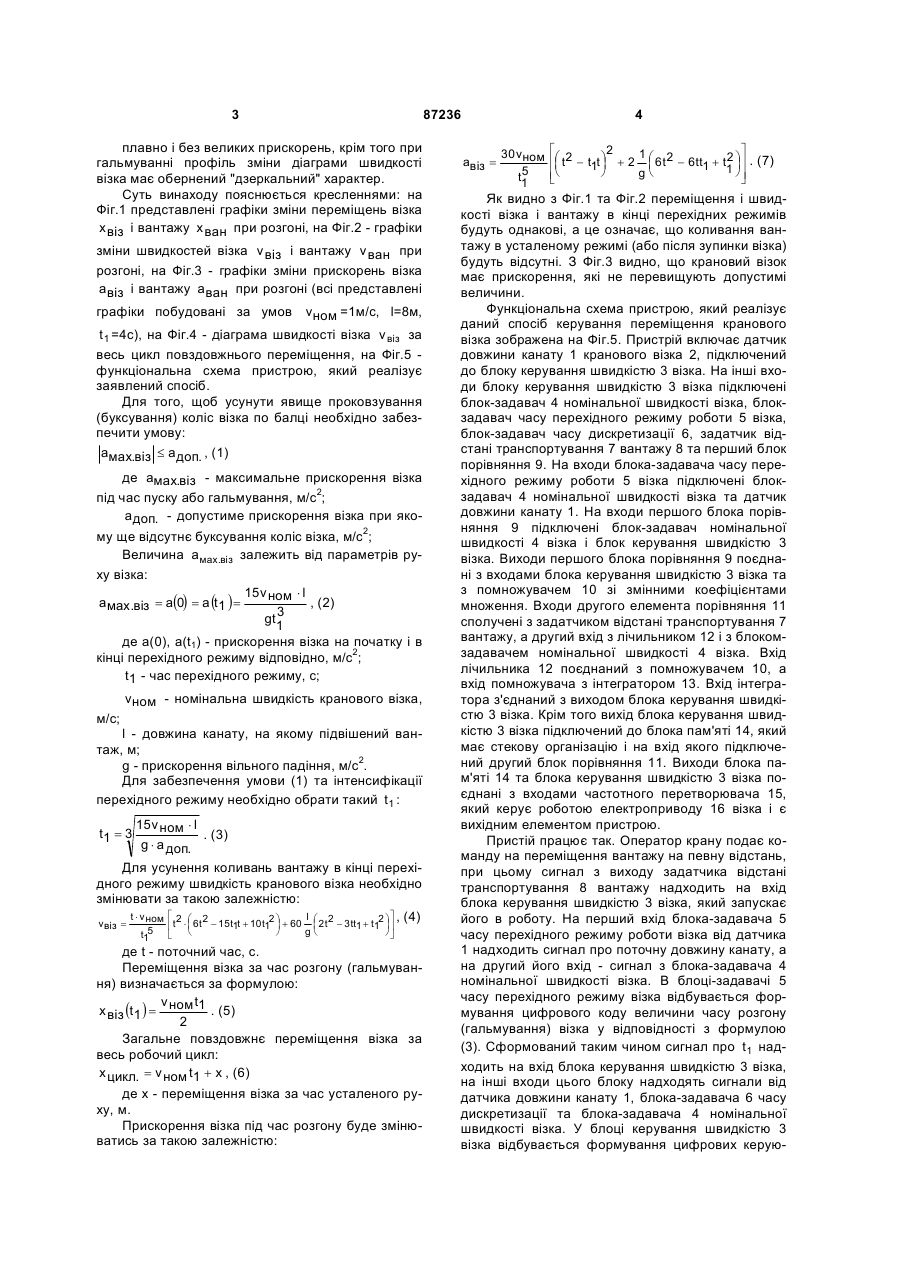
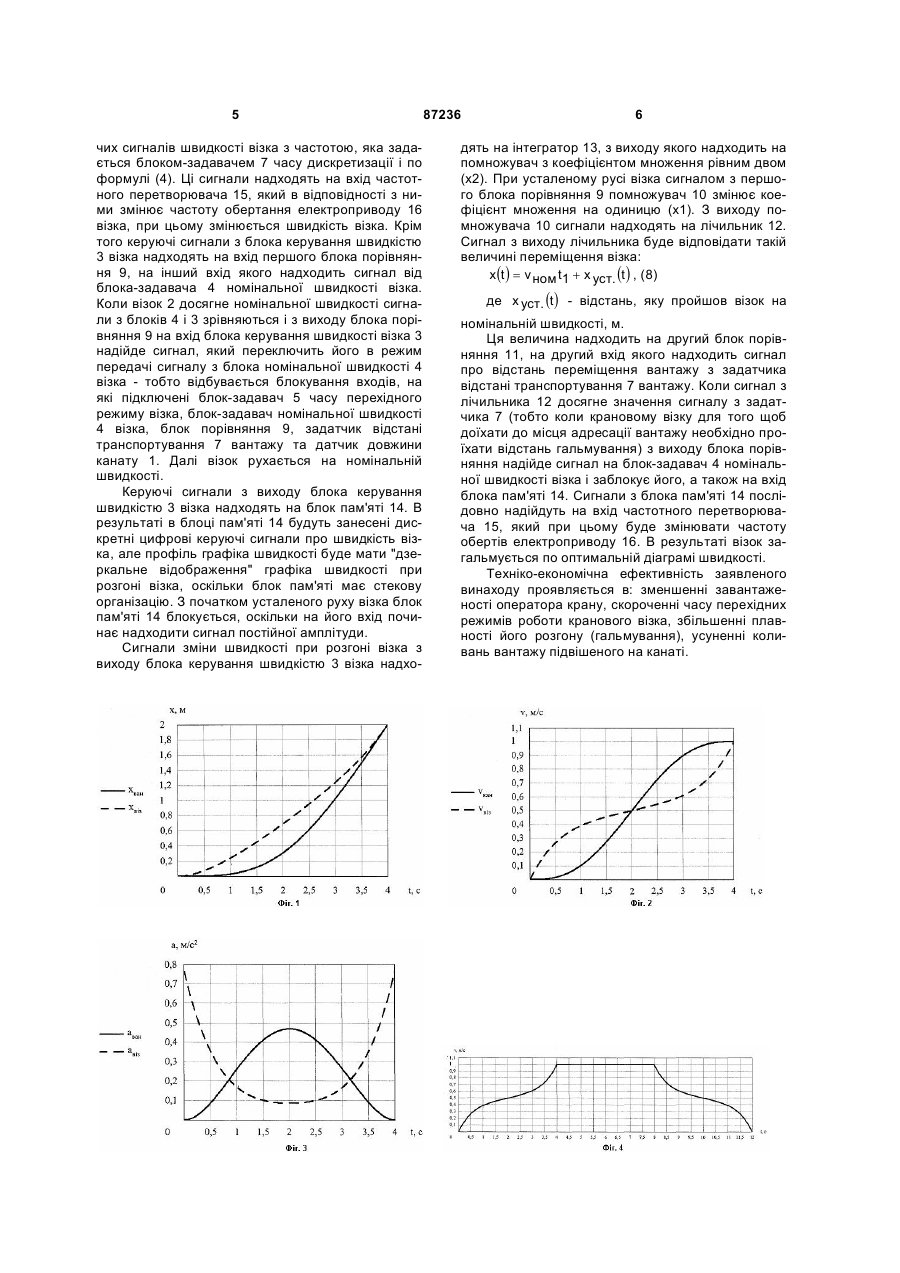
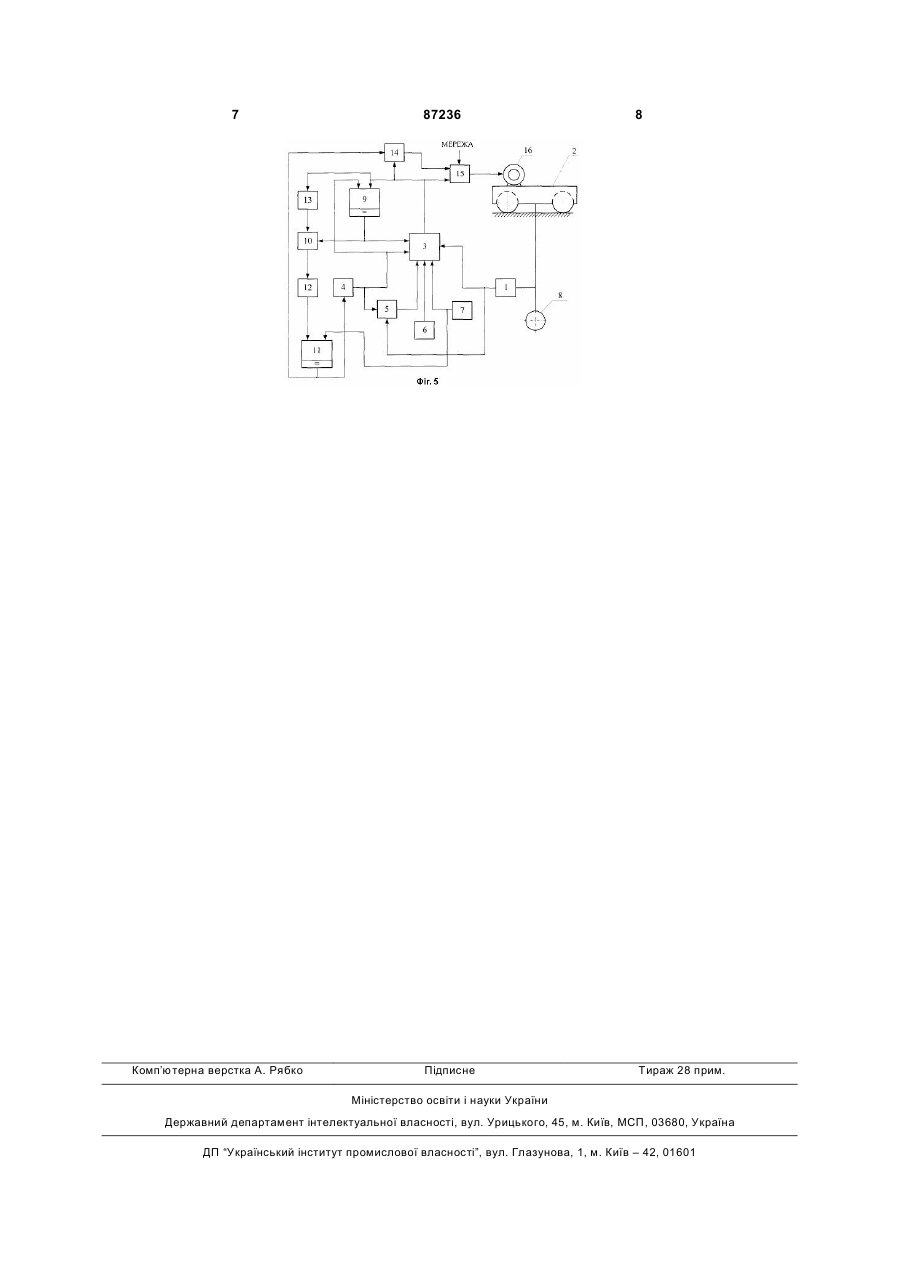
Спосіб керування механізмом переміщення кранового візка, що включає вимірювання довжини каната, на якому підвішений вантаж, визначення часу розгону кранового візка або його гальмування, здійснення розгону кранового візка до встановленої номінальної швидкості та його гальмування, який відрізняється тим, що згаданий розгін здійснюють по визначеному закону зміни швидкості: ù t × v ном é 2 æ 2 l t ç 6t - 15 t t + 10t 2 ö + 60 æ 2t2 - 3tt + t2 ö , v = ÷ ç ÷ Винахід відноситься до способів керування приводами підйомно-транспортних механізмів. Відомий спосіб демпфірування коливань вантажу, обґрунтований на основі принципу максимуму (Смехов А.А., Ерофеев Н.И. Оптимальное управление подъемно-транспортными машинами. - М.: Машиностроение, 1975. - 239с.). Відповідно до цього способу пуск (зупинка) візка здійснюються на трьох часових інтервалах. Недоліком цього способу є великі прискорення візка в моменти переходів від одного часового інтервалу до іншого в наслідок чого можливі проковзування коліс візка по балці і, як наслідок, "зрив" оптимального алгоритму керування візком. Ще одним недоліком відомого способу є залишкові коливання вантажу в період усталеного руху візка. Відомий також спосіб керування механізмом переміщення візка (див а. с. СРСР №1794865 МПК В66С13/22, 13/06 за 1993р., бюл. №6) який передбачає розгін (зупинку) здійснювати на трьох часових інтервалах, при цьому швидкість візка змінюється нелінійно. Цей спосіб обраний за прототип. Недоліком прототипу слід вважати неплавний характер зміни швидкості візка. Винаходом ставиться задача покращити якість перехідних режимів (пуск або гальмування) кранового візка. Поставлене винаходом завдання досягається тим, що у способі керування механізмом переміщення кранового візка, відповідно до якого вимірюють довжину підвісу канату та визначають час розгону, згідно винаходу до усталеної (номінальної) швидкості крановий візок розганяється по визначеному закону зміни швидкості: l æ 2 t × vном é 2 æ 2 2ö 2 öù , v віз = ê t × ç 6t - 15t1t + 10t1 ÷ + 60 ç 2t - 3tt1 + t1 ÷ ú віз t5 1 ê ë è 1 1ø 1 gè 1 øú û ë è ø gè øû де t 1 - час перехідного режиму; vном - номінальна швидкість кранового візка; l - довжина канату, на якому підвішений вантаж; g - прискорення вільного падіння; де t - поточний час, (11) UA (19) t15 87236 (13) C2 де t1 - час розгону; vном - номінальна швидкість кранового візка; l - довжина канату, на якому підвішений вантаж; g - прискорення вільного падіння; t - поточний час, а гальмування кранового візка здійснюють за законом зміни швидкості, графік якого має обернений дзеркальний характер щодо графіка згаданого закону зміни швидкості при розгоні. 3 87236 плавно і без великих прискорень, крім того при гальмуванні профіль зміни діаграми швидкості візка має обернений "дзеркальний" характер. Суть винаходу пояснюється кресленнями: на Фіг.1 представлені графіки зміни переміщень візка x віз і вантажу х ван при розгоні, на Фіг.2 - графіки зміни швидкостей візка v віз і вантажу v ван при розгоні, на Фіг.3 - графіки зміни прискорень візка авіз і вантажу аван при розгоні (всі представлені графіки побудовані за умов vном =1м/с, l=8м, t 1 =4c), на Фіг.4 - діаграма швидкості візка v віз за весь цикл повздовжнього переміщення, на Фіг.5 функціональна схема пристрою, який реалізує заявлений спосіб. Для того, щоб усунути явище проковзування (буксування) коліс візка по балці необхідно забезпечити умову: амах.віз £ адоп. , (1) де aмах.віз - максимальне прискорення візка під час пуску або гальмування, м/с2; а доп. - допустиме прискорення візка при яко му ще відсутнє буксування коліс візка, м/с2; Величина aмах.віз залежить від параметрів руху візка: 15 v ном × l а мах .віз = а(0) = а (t 1 ) = , (2) gt 3 1 де a(0), a(t1) - прискорення візка на початку і в кінці перехідного режиму відповідно, м/с2; t1 - час перехідного режиму, с; vном - номінальна швидкість кранового візка, м/с; l - довжина канату, на якому підвішений вантаж, м; g - прискорення вільного падіння, м/с2. Для забезпечення умови (1) та інтенсифікації перехідного режиму необхідно обрати такий t 1 : t1 = 3 15v ном × l . (3) g × а доп. Для усунення коливань вантажу в кінці перехідного режиму швидкість кранового візка необхідно змінювати за такою залежністю: ù , (4) t × v ном é 2 æ 2 l t × ç 6 t - 15 t t + 10 t 2 ö + 60 æ 2 t 2 - 3 tt + t 2 ö v = ÷ ç ÷ віз t15 ê ë è 1 1 ø gè 1 1 ú øû де t - поточний час, с. Переміщення візка за час розгону (гальмування) визначається за формулою: v t х віз (t 1 ) = ном 1 . (5) 2 Загальне повздовжнє переміщення візка за весь робочий цикл: х цикл. = v ном t1 + x , (6) де х - переміщення візка за час усталеного руху, м. Прискорення візка під час розгону буде змінюватись за такою залежністю: 4 авіз = 30 vном t5 1 2 é ù 1 êæ t 2 - t1t ö + 2 æ 6 t 2 - 6tt1 + t 2 öú . (7) ç ÷ ç 1 ÷ú ø ø gè êè ë û Як видно з Фіг.1 та Фіг.2 переміщення і швидкості візка і вантажу в кінці перехідних режимів будуть однакові, а це означає, що коливання вантажу в усталеному режимі (або після зупинки візка) будуть відсутні. З Фіг.3 видно, що крановий візок має прискорення, які не перевищують допустимі величини. Функціональна схема пристрою, який реалізує даний спосіб керування переміщення кранового візка зображена на Фіг.5. Пристрій включає датчик довжини канату 1 кранового візка 2, підключений до блоку керування швидкістю 3 візка. На інші входи блоку керування швидкістю 3 візка підключені блок-задавач 4 номінальної швидкості візка, блокзадавач часу перехідного режиму роботи 5 візка, блок-задавач часу дискретизації 6, задатчик відстані транспортування 7 вантажу 8 та перший блок порівняння 9. На входи блока-задавача часу перехідного режиму роботи 5 візка підключені блокзадавач 4 номінальної швидкості візка та датчик довжини канату 1. На входи першого блока порівняння 9 підключені блок-задавач номінальної швидкості 4 візка і блок керування швидкістю 3 візка. Виходи першого блока порівняння 9 поєднані з входами блока керування швидкістю 3 візка та з помножувачем 10 зі змінними коефіцієнтами множення. Входи другого елемента порівняння 11 сполучені з задатчиком відстані транспортування 7 вантажу, а другий вхід з лічильником 12 і з блокомзадавачем номінальної швидкості 4 візка. Вхід лічильника 12 поєднаний з помножувачем 10, а вхід помножувача з інтегратором 13. Вхід інтегратора з'єднаний з виходом блока керування швидкістю 3 візка. Крім того вихід блока керування швидкістю 3 візка підключений до блока пам'яті 14, який має стекову організацію і на вхід якого підключений другий блок порівняння 11. Виходи блока пам'яті 14 та блока керування швидкістю 3 візка поєднані з входами частотного перетворювача 15, який керує роботою електроприводу 16 візка і є вихідним елементом пристрою. Пристій працює так. Оператор крану подає команду на переміщення вантажу на певну відстань, при цьому сигнал з виходу задатчика відстані транспортування 8 вантажу надходить на вхід блока керування швидкістю 3 візка, який запускає його в роботу. На перший вхід блока-задавача 5 часу перехідного режиму роботи візка від датчика 1 надходить сигнал про поточну довжину канату, а на другий його вхід - сигнал з блока-задавача 4 номінальної швидкості візка. В блоці-задавачі 5 часу перехідного режиму візка відбувається формування цифрового коду величини часу розгону (гальмування) візка у відповідності з формулою (3). Сформований таким чином сигнал про t 1 надходить на вхід блока керування швидкістю 3 візка, на інші входи цього блоку надходять сигнали від датчика довжини канату 1, блока-задавача 6 часу дискретизації та блока-задавача 4 номінальної швидкості візка. У блоці керування швидкістю 3 візка відбувається формування цифрових керую 5 чих сигналів швидкості візка з частотою, яка задається блоком-задавачем 7 часу дискретизації і по формулі (4). Ці сигнали надходять на вхід частотного перетворювача 15, який в відповідності з ними змінює частоту обертання електроприводу 16 візка, при цьому змінюється швидкість візка. Крім того керуючі сигнали з блока керування швидкістю 3 візка надходять на вхід першого блока порівняння 9, на інший вхід якого надходить сигнал від блока-задавача 4 номінальної швидкості візка. Коли візок 2 досягне номінальної швидкості сигнали з блоків 4 і 3 зрівняються і з виходу блока порівняння 9 на вхід блока керування швидкості візка 3 надійде сигнал, який переключить його в режим передачі сигналу з блока номінальної швидкості 4 візка - тобто відбувається блокування входів, на які підключені блок-задавач 5 часу перехідного режиму візка, блок-задавач номінальної швидкості 4 візка, блок порівняння 9, задатчик відстані транспортування 7 вантажу та датчик довжини канату 1. Далі візок рухається на номінальній швидкості. Керуючі сигнали з виходу блока керування швидкістю 3 візка надходять на блок пам'яті 14. В результаті в блоці пам'яті 14 будуть занесені дискретні цифрові керуючі сигнали про швидкість візка, але профіль графіка швидкості буде мати "дзеркальне відображення" графіка швидкості при розгоні візка, оскільки блок пам'яті має стекову організацію. З початком усталеного руху візка блок пам'яті 14 блокується, оскільки на його вхід починає надходити сигнал постійної амплітуди. Сигнали зміни швидкості при розгоні візка з виходу блока керування швидкістю 3 візка надхо 87236 6 дять на інтегратор 13, з виходу якого надходить на помножувач з коефіцієнтом множення рівним двом (х2). При усталеному русі візка сигналом з першого блока порівняння 9 помножувач 10 змінює коефіцієнт множення на одиницю (х1). З виходу помножувача 10 сигнали надходять на лічильник 12. Сигнал з виходу лічильника буде відповідати такій величині переміщення візка: x (t ) = v ном t1 + x уст. (t ) , (8) де x уст. (t ) - відстань, яку пройшов візок на номінальній швидкості, м. Ця величина надходить на другий блок порівняння 11, на другий вхід якого надходить сигнал про відстань переміщення вантажу з задатчика відстані транспортування 7 вантажу. Коли сигнал з лічильника 12 досягне значення сигналу з задатчика 7 (тобто коли крановому візку для того щоб доїхати до місця адресації вантажу необхідно проїхати відстань гальмування) з виходу блока порівняння надійде сигнал на блок-задавач 4 номінальної швидкості візка і заблокує його, а також на вхід блока пам'яті 14. Сигнали з блока пам'яті 14 послідовно надійдуть на вхід частотного перетворювача 15, який при цьому буде змінювати частоту обертів електроприводу 16. В результаті візок загальмується по оптимальній діаграмі швидкості. Техніко-економічна ефективність заявленого винаходу проявляється в: зменшенні завантаженості оператора крану, скороченні часу перехідних режимів роботи кранового візка, збільшенні плавності його розгону (гальмування), усуненні коливань вантажу підвішеного на канаті. 7 Комп’ютерна верстка А. Рябко 87236 8 Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of control of mechanism of displacement of crane crab
Автори англійськоюLoveikin Viacheslav Serhiiovych, Loveikin Andrii Viacheslavovych, Romasevych Yurii Oleksandrovych
Назва патенту російськоюСпособ управления механизмом перемещения крановой тележки
Автори російськоюЛовейкин Вячеслав Сергеевич, Ловейкин Андрей Вячеславович, Ромасевич Юрий Александрович
МПК / Мітки
МПК: B66C 13/22, B66C 13/04
Мітки: механізмом, візка, спосіб, кранового, керування, переміщення
Код посилання
<a href="https://ua.patents.su/4-87236-sposib-keruvannya-mekhanizmom-peremishhennya-kranovogo-vizka.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування механізмом переміщення кранового візка</a>
Пристрій для керування приводом візка з вантажем на гнучкому підвісі
Номер патенту: 28823
Опубліковано: 25.12.2007
Автори: Ромасевич Юрій Олександрович, Ловейкін Вячеслав Сергійович, Ярошенко Володимир Федорович
МПК: B66C 13/04
Мітки: приводом, вантажем, візка, підвісі, пристрій, керування, гнучкому
Формула / Реферат:
Пристрій для керування приводом візка з вантажем на гнучкому підвісі, що містить датчик довжини підвісу, блок пам'яті, компаратор, блок пам'яті, який відрізняється тим, що пристрій додатково обладнаний арифметичним блоком, на входи якого підключені блок формування маси візка, датчик довжини гнучкого підвісу, датчик швидкості візка та підключений через аналого-цифровий перетворювач датчик маси вантажу, при цьому вихід арифметичного пристрою...
Пристрій для керування гальмуванням візка крана
Номер патенту: 27443
Опубліковано: 25.10.2007
Автори: Ромасевич Юрій Олександрович, Ярошенко Володимир Федорович, Ловейкін Вячеслав Сергійович
МПК: B66C 13/18
Мітки: пристрій, візка, гальмуванням, крана, керування
Формула / Реферат:
Пристрій для керування гальмуванням візка крана, що містить задатчик, який своїми виходами підключений до входів елементів порівняння, а їх виходи через ключові елементи з'єднані з частотним перетворювачем, інтегратор, шляховий вимикач та датчик швидкості, який відрізняється тим, що пристрій побудований по схемі з проміжною ланкою постійного струму, інтегратор підключений до датчика швидкості, а виходом - до другого елемента порівняння, крім...
Пристрій для визначення кінематичних параметрів кранового візка
Номер патенту: 31546
Опубліковано: 10.04.2008
Автори: Ярошенко Володимир Федорович, Ловейкін Вячеслав Сергійович, Ромасевич Юрій Олександрович
МПК: B66C 13/00
Мітки: пристрій, візка, визначення, кінематичних, параметрів, кранового
Формула / Реферат:
Пристрій для визначення кінематичних параметрів кранового візка, що містить герконові реле (чутливі елементи): крайнього лівого, крайнього правого і середнього положень, закріплені на кран-балці, і магніт, який встановлений на візку крана та взаємодіє з герконовими реле, який відрізняється тим, що обладнаний датчиком руху візка, який складається з датчика прямого та датчика зворотного руху візка, які підключені до блока визначення напрямку...
Пристрій для обмеження розгойдувань вантажу, підвішеного до візка крана
Номер патенту: 30454
Опубліковано: 25.02.2008
Автори: Ярошенко Володимир Федорович, Ромасевич Юрій Олександрович, Ловейкін Вячеслав Сергійович
МПК: B66C 13/04
Мітки: крана, візка, пристрій, вантажу, підвішеного, розгойдувань, обмеження
Формула / Реферат:
Пристрій для обмеження розгойдувань вантажу, підвішеного до візка крана, що містить електропривід візка, датчик ваги вантажу, регулятор швидкості візка, джерело постійної напруги, який відрізняється тим, що обладнаний датчиком довжини каната, який підключений до першого входу блока-формувача часу розгону візка, з можливістю надходження на його другий вхід сигналу від блока-формувача номінальної швидкості візка, таймером, приєднаним до блока...
Пристрій для керування пуском та гальмуванням електроприводу кранового механізму

Номер патенту: 8447
Опубліковано: 15.08.2005
Автор: Шкваренко Микола Іванович
МПК: B66C 13/22
Мітки: пристрій, електроприводу, гальмуванням, механізму, керування, пуском, кранового
Формула / Реферат:
1. Пристрій для керування пуском та гальмуванням електроприводу кранового механізму, що містить трифазний асинхронний двигун з фазним ротором, кінематично зв'язаний з виконавчим механізмом, ланцюг живлення, частину схеми завдання команд і керування ступенями, частину силової схеми виконання команд, підключену на виході до роторних резисторів електродвигуна, а на вході - до частини схеми, що задає ступінчасту затримку часу виконання команд,...
Попередній патент: Бурова коронка
Наступний патент: Спосіб управління розподілом шихтових матеріалів по колу на колошнику доменної печі
Випадковий патент: Повітроосушувальна установка