Спосіб вимірювання швидкості руху і глибини занурення кліті при наземній установці підйомної машини
Номер патенту: 44406
Опубліковано: 12.10.2009
Автори: Квасніков Володимир Павлович, Харченко Володимир Петрович, Ларін Віталій Юрійович
Формула / Реферат
Спосіб вимірювання швидкості руху і глибини занурення кліті при наземній установці підйомної машини, заснований на вимірюванні оборотів колеса, який відрізняється тим, що два чутливі елементи феромагнітного первинного перетворювача встановлюють один над одним на відстані не менше ширини осі колеса підйому, на віддаленні від площини колеса, достатньому для спрацьовування чутливих елементів феромагнітного перетворювача, і на відстані від вала колеса підйому, достатній для забезпечення необхідної точності вимірювання, від феромагнітного перетворювача вихідні сигнали послідовно надходять на блоки визначення напряму руху, вимірювання глибини занурення, вимірювання швидкості руху через блок виведення вимірювальної інформації на модуль відображення в цифровій формі інформації про швидкість руху кліті і глибину її занурення, а також через блок сполучення виводять інформацію в персональний комп'ютер для обробки і зберігання.
Текст
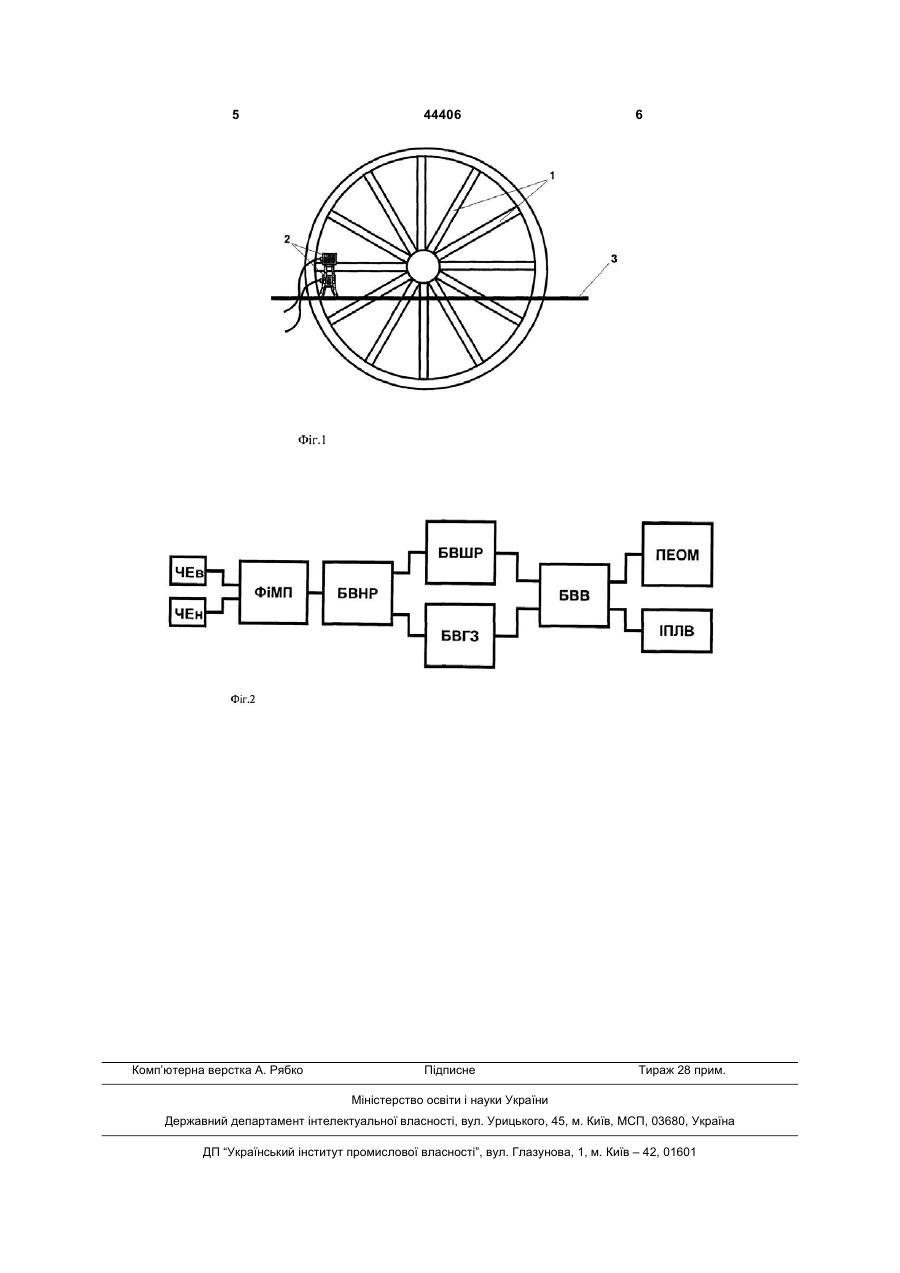
Спосіб вимірювання швидкості руху і глибини занурення кліті при наземній установці підйомної машини, заснований на вимірюванні оборотів колеса, який відрізняється тим, що два чутливі елементи феромагнітного первинного перетворювача встановлюють один над одним на відстані не менше ширини осі колеса підйому, на віддаленні 3 до винаходу два чутливі елементи феромагнітного первинного перетворювача, встановлюють один над одним на відстані не менше ширини вісі колеса підйому, на віддалені від площини колеса, достатньому для спрацьовування чутливих елементів феромагнітного перетворювача і на відстані від вала колеса підйому достатньому для забезпечення необхідної точності вимірювання, від феромагнітного перетворювача вихідні сигнали послідовно надходять на блоки визначення напряму руху, вимірювання глибини занурення, вимірювання швидкості руху через блок виведення вимірювальної інформації на модуль відображення в цифровій формі інформації про швидкість руху кліті і глибину його занурення, а також через блок сполучення виводять інформацію в персональний комп'ютер для обробки і зберігання. Запропонований спосіб забезпечує вимірювання глибини занурення кліті підйомної машини і вимірювання швидкості її руху за рахунок того, що кількісна інформація про глибину знаходження кліті підйомної машини в стволі шахти та швидкість її руху у відповідних одиницях виміру, надходить до блоку відображення, що дає можливість оцінювати ситуацію і приймати відповідні рішення. На Фіг.1 представлена схема установки первинних перетворювачів. На поверхні обслуговуючого майданчика (3) укріплюються два чутливих елементи феромагнітного перетворювача (2), які побудовані на феритових сердечниках з намотаними на них котушками індуктивності, розміщеними в захисних корпусах і залитих термостійким епоксидним компаундом. Відкрита сторона корпусу обернена у бік спиці колеса підйому, завдяки чому в цю сторону вільно розповсюджується магнітний потік, якій створюється феромагнітним чутливим елементом. За допомогою дротів котушки включаються в схему феромагнітного перетворювача, розташованого на відстані від точки взаємодії чутливих елементів з приводними елементами. Приводними елементами перетворювача є спиці колеса підйому (1). При обертанні останнього ці спиці перетинають зону розповсюдження магнітного потоку котушок індуктивності, сконструйованих за типом відкритого контуру і включених в схему коливального контуру генератора, і таким чином забезпечують спрацьовування датчика за рахунок зриву генерації коливань LC-генератора. Чутливі елементи встановлені так, щоб не допускати одночасного спрацьовування обох чутливих елементів. Ця схема установки дозволяє виконати контроль напряму руху кліті, оскільки при різному напрямі руху (вгору або вниз) напрям обертання канатоведучого барабана і отже колеса підйому буде різним (по часові або проти часової) і відповідно першим спрацьовуватиме верхній або нижній елемент (2). По суті, для вимірювання 44406 4 швидкості достатньо було і одного чутливого елементу, але оскільки потрібне визначення глибини занурення кліті і напряму її руху в стволі, то використовуються два чутливих елемента. Структурна схема пристрою наведена на фиг.2. Чутливі елементи включені в схему феромагнітного перетворювача ФІМП. З виходу феромагнітного перетворювача сигнали надходять в блок визначення напряму руху (БВНР). Визначення напряму відбувається по першочерговості спрацьовування верхнього ЧЕв (при русі кліті вниз), або нижнього ЧЕн (при русі кліті вгору) чутливого елементу. Черговість спрацьовування чутливих елементів ФІМП перетворюється в блоці визначення напряму руху в рівень логічного нуля або одиниці. Також в цьому блоці відбувається перетворення двох імпульсних сигналів, які надходять від ФІМП, в один для зручності подальшої обробки. З виходу БВНР сигнали надходять на блок вимірювання глибини занурення (БВГЗ) і на блок вимірювання швидкості руху (БВІПР). Υ блоці БВГЗ відбувається рахунок імпульсів, що надходять від БВНР, перерахунок імпульсів в метричну величину і її перетворення в цифрову форму у вигляді паралельного коду. У блоці БВШР виконується вимірювання тривалості паузи між імпульсами, яка характеризує швидкість обертання колеса підйому, перерахунок часового параметра в швидкісний, і його перетворення в цифрову форму, також у вигляді паралельного коду. З виходу блоків БВГЗ і БВШР дані про глибину занурення кліті, напряму його руху і його швидкості надходять на блок введення-виводу БВВ. Даний блок виконує функцію перетворення цих інформаційних сигналів для передачі їх в обчислювальний блок (ОБ), а також на блок індикаторного пристрою локального відображення (ІПЛВ), де інформація про швидкість і глибину занурення відображається на цифрових індикаторах. У ОБ відбувається зберігання інформації, її обробка і відображення на екрані монітора. Також блок БВВ, спільно з ОБ може служити для розширення функціональності розробленої системи, наприклад для організації управління швидкісними режимами підйомної машини. Джерела інформації: 1. Ивенский Ю.Н. Бесконтактные путевые переключатели. - Μ.: Энергия, 1971. - с.116, 117, 126. 2. Патент 96072801 Україна. Спосіб та пристрій для оперативного визначення параметрів рідких та сипучих речовин / Н.И. Чичикало, Б.З. Балтер, Ю.Г. Кожанов; Заявл. 12.07.96; Опубл. 31.08.98. - Бюл.№4. 3. Шахтные подъемные машины и лебедки / Отраслевой каталог. - М.: Изд. ЦНИИТЯЖМАШ, 1989 - С.26-27. 5 Комп’ютерна верстка А. Рябко 44406 6 Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for measurement of rate of motion and depth of immersion of cage at surface installation of lift machine
Автори англійськоюLarin Vitalii Yuriiovych, Kharchenko Volodymyr Petrovych, Kvasnikov Volodymyr Pavlovych
Назва патенту російськоюСпособ измерения скорости движения и глубины погружения клети при наземной установке подъемной машины
Автори російськоюЛарин Виталий Юрьевич, Харченко Владимир Петрович, Квасников Владимир Павлович
МПК / Мітки
МПК: G01C 23/00
Мітки: спосіб, наземний, руху, швидкості, машини, кліті, вимірювання, занурення, глибини, установці, підйомної
Код посилання
<a href="https://ua.patents.su/3-44406-sposib-vimiryuvannya-shvidkosti-rukhu-i-glibini-zanurennya-kliti-pri-nazemnijj-ustanovci-pidjjomno-mashini.html" target="_blank" rel="follow" title="База патентів України">Спосіб вимірювання швидкості руху і глибини занурення кліті при наземній установці підйомної машини</a>
Цифровий прилад вимірювання швидкості руху об’єктів
Номер патенту: 33444
Опубліковано: 25.06.2008
Автори: Наконечний Адріан Йосифович, Тишик Іван Ярославович
МПК: H03B 5/18
Мітки: швидкості, прилад, руху, вимірювання, об'єктів, цифровий
Формула / Реферат:
Цифровий прилад вимірювання швидкості руху об'єктів, що складається з послідовно з'єднаних приймача відбитого сигналу зондування, змішувача, вхід якого з'єднаний з виходом випромінювача разом з еталонним генератором, аналого-цифрового перетворювача та індикатора, який відрізняється тим, що додатково містить антиелайсінговий фільтр, вихід якого з'єднаний з входом аналогового перетворювача та послідовно з'єднаних дискретного...
Пристрій для вимірювання довжини та швидкості руху виробів
Номер патенту: 70581
Опубліковано: 25.07.2007
Автори: Баранов Юрій Вячеславович, Маслак Віктор Миколайович, Лютов Ігор Валерійович, Бондар Анатолій Юрьйович
МПК: G01B 7/02
Мітки: пристрій, довжини, швидкості, виробів, вимірювання, руху
Формула / Реферат:
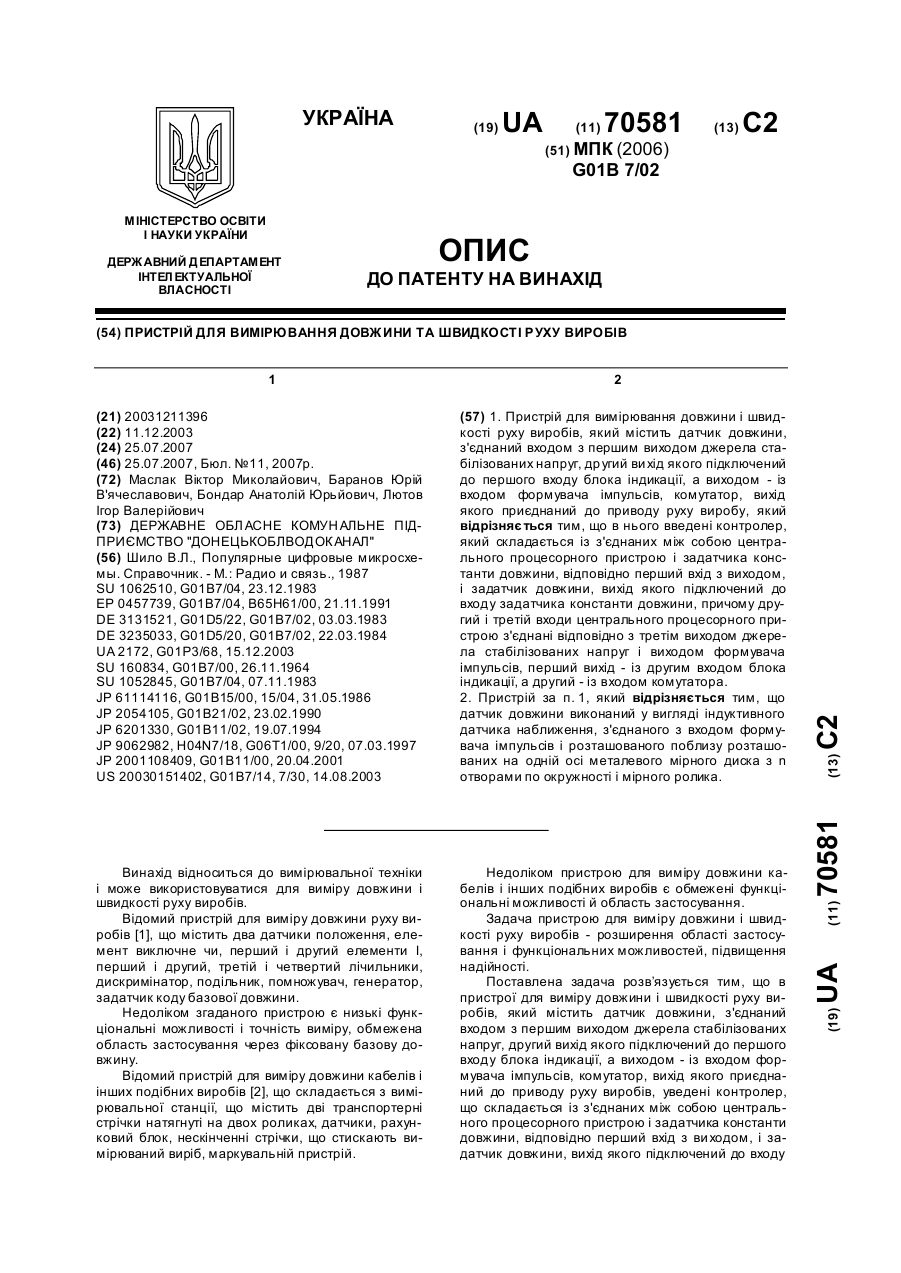
1. Пристрій для вимірювання довжини і швидкості руху виробів, який містить датчик довжини, з'єднаний входом з першим виходом джерела стабілізованих напруг, другий вихід якого підключений до першого входу блока індикації, а виходом - із входом формувача імпульсів, комутатор, вихід якого приєднаний до приводу руху виробу, який відрізняється тим, що в нього введені контролер, який складається із з'єднаних між собою центрального процесорного...
Електричний обмежувач швидкості підйомної машини
Номер патенту: 21218
Опубліковано: 04.11.1997
Автор: Шаповалов Микола Іванович
МПК: B66B 5/04
Мітки: обмежувач, швидкості, електричний, підйомної, машини
Формула / Реферат:
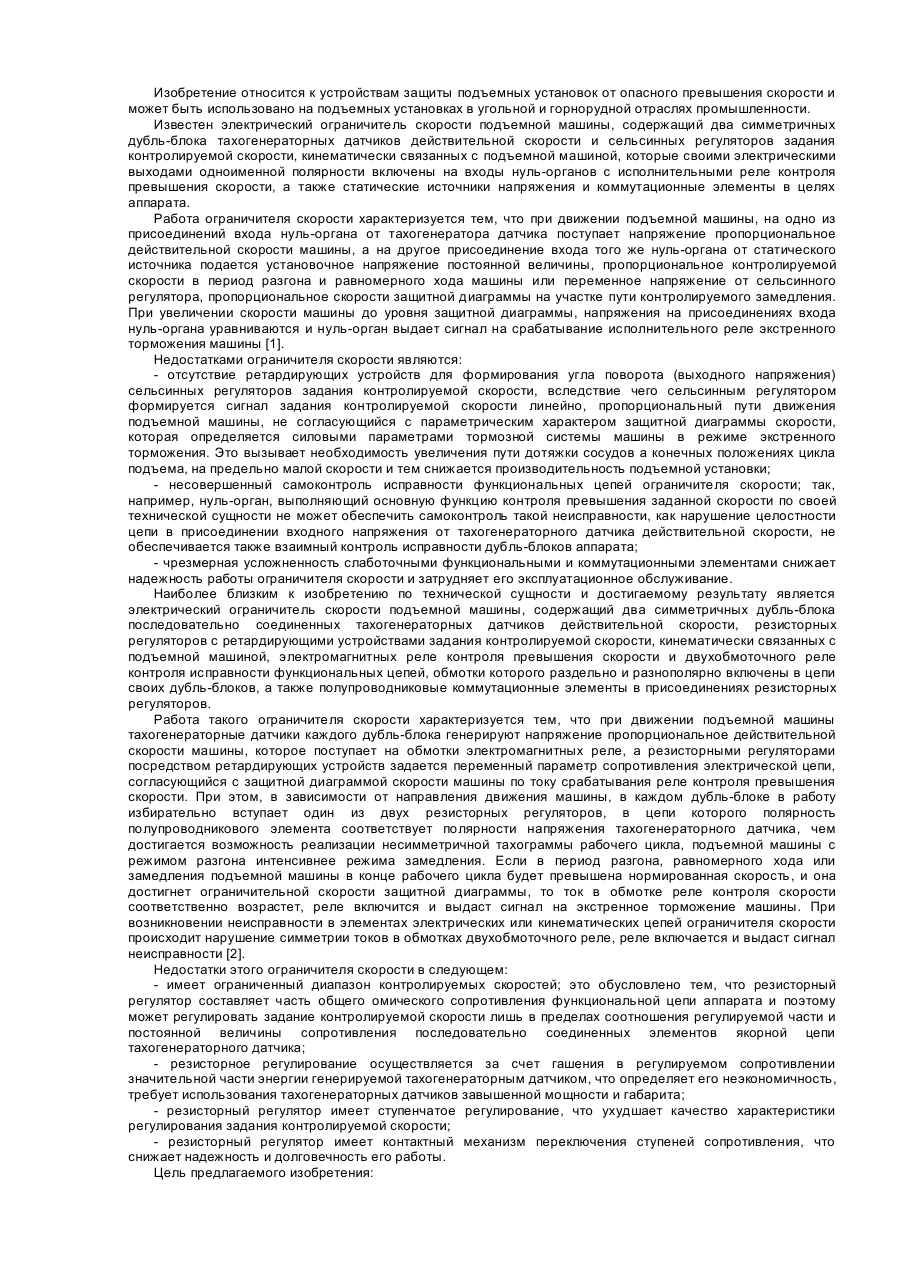
Электрический ограничитель скорости подъемной машины, содержащий два блока, каждый из которых имеет тахогенераторный датчик скорости, два регулятора задания контролируемой скорости, реле контроля скорости, одну из обмоток двухобмоточного реле и коммутационные электроконтакты, соединенные между собой электрически последовательно, а также ретардирующее устройство, механически соединенное с регуляторами задания контролируемой скорости и...
Пристрій для контролю перевищення швидкості шахтної підйомної машини
Номер патенту: 4955
Опубліковано: 28.12.1994
Автори: Прохоренко Вадим Олександрович, Матвієнко Микола Павлович
МПК: B66B 5/04
Мітки: пристрій, швидкості, шахтної, перевищення, контролю, машини, підйомної
Формула / Реферат:
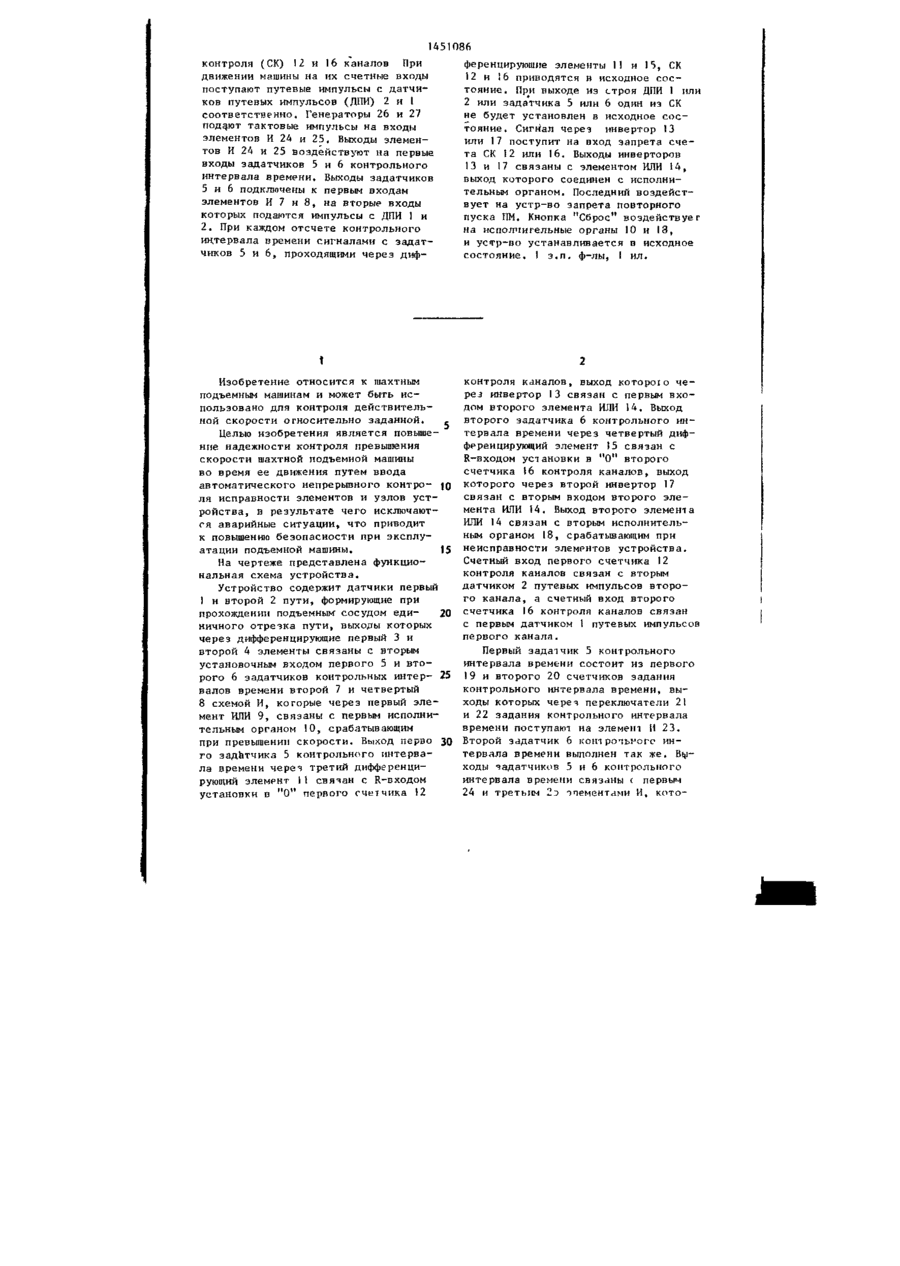
1. Устройство для контроля превышения скорости шахтной подъемной машины, содержащее первый генератор тактовых импульсов, выход которого подключен к первому входу первого элемента И, второй вход которого соединен с первым входом второго элемента И, второй вход которого подключен к выходу первого датчика пути и к входу первого дифференцирующего элемента, отличающееся тем, что, с целью повышения надежности, оно снабжено вторым датчиком и...
Спосіб градуювання дистанційних вимірювачів швидкості руху
Номер патенту: 69430
Опубліковано: 15.09.2004
Автор: Чепіжко Володимир Іванович
МПК: G01S 7/00, G01P 3/36, G01S 13/00
Мітки: дистанційних, швидкості, спосіб, руху, вимірювачів, градуювання
Формула / Реферат:
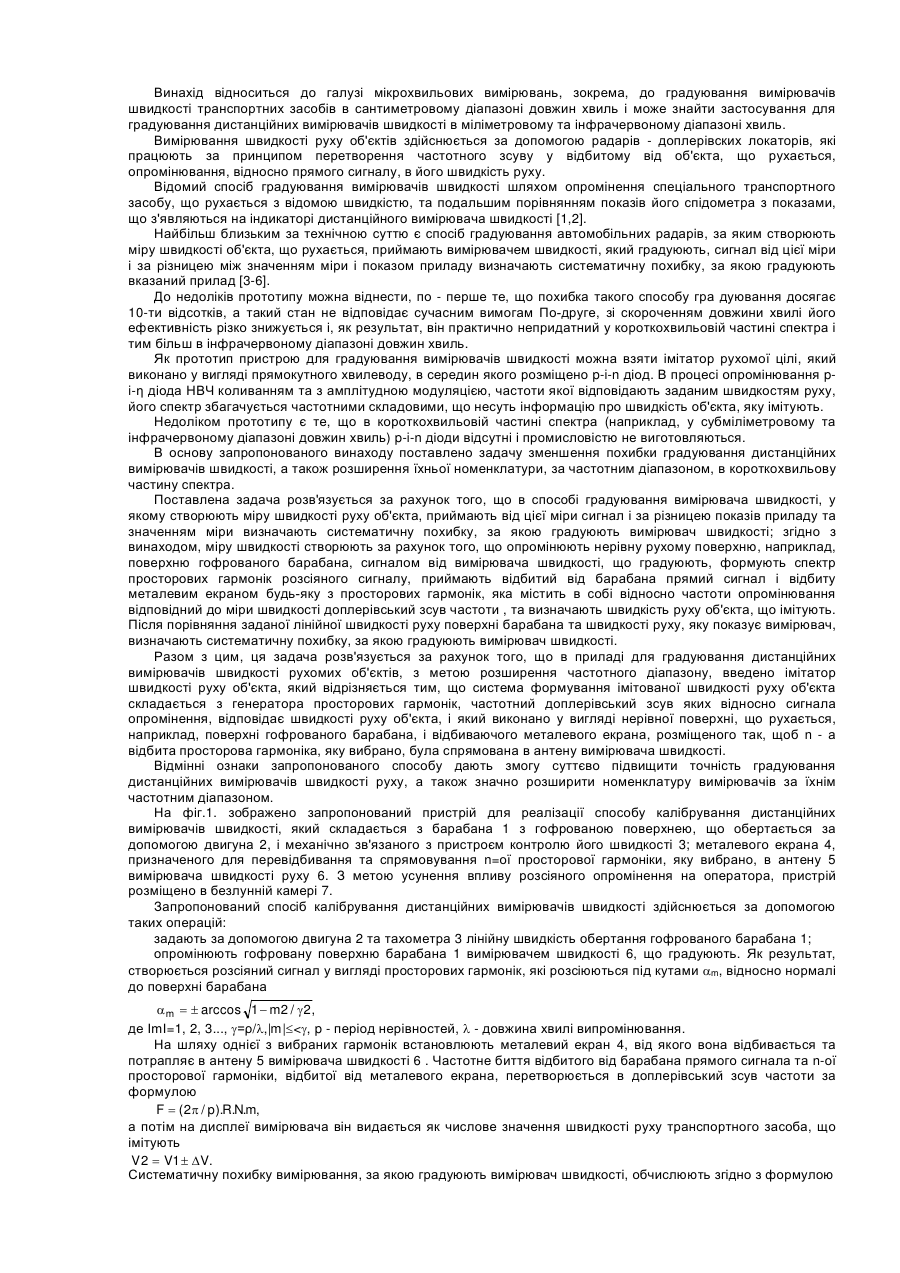
Спосіб градуювання дистанційних вимірювачів швидкості руху, при якому створюють міру швидкості руху об'єкта, яку приймають вимірювачем швидкості руху, що градуюють, і за різницею показань приладу та значення міри швидкості руху визначають систематичну похибку, за якою градуюють вимірювач швидкості руху, який відрізняється тим, що міру швидкості руху створюють за рахунок того, що встановлюють металевий екран, опромінюють нерівну рухому...
Попередній патент: Спосіб керування транспортним засобом
Наступний патент: Пластмасова рамка для отримання і пакування секційного меду
Випадковий патент: Спосіб утворення прорізу у несучій стіні