Цифровий прилад вимірювання швидкості руху об’єктів
Номер патенту: 33444
Опубліковано: 25.06.2008
Формула / Реферат
Цифровий прилад вимірювання швидкості руху об'єктів, що складається з послідовно з'єднаних приймача відбитого сигналу зондування, змішувача, вхід якого з'єднаний з виходом випромінювача разом з еталонним генератором, аналого-цифрового перетворювача та індикатора, який відрізняється тим, що додатково містить антиелайсінговий фільтр, вихід якого з'єднаний з входом аналогового перетворювача та послідовно з'єднаних дискретного вейвлет-перетворювача, пристрою порогування, перетворювача коду, причому вихід змішувача з'єднаний з входом антиелайсінгового фільтра, вихід аналогового перетворювача з'єднаний з входом аналого-цифрового перетворювача, вихід якого з'єднаний з входом дискретного вейвлет-перетворювача, а вихід перетворювача коду з'єднаний з входом індикатора.
Текст
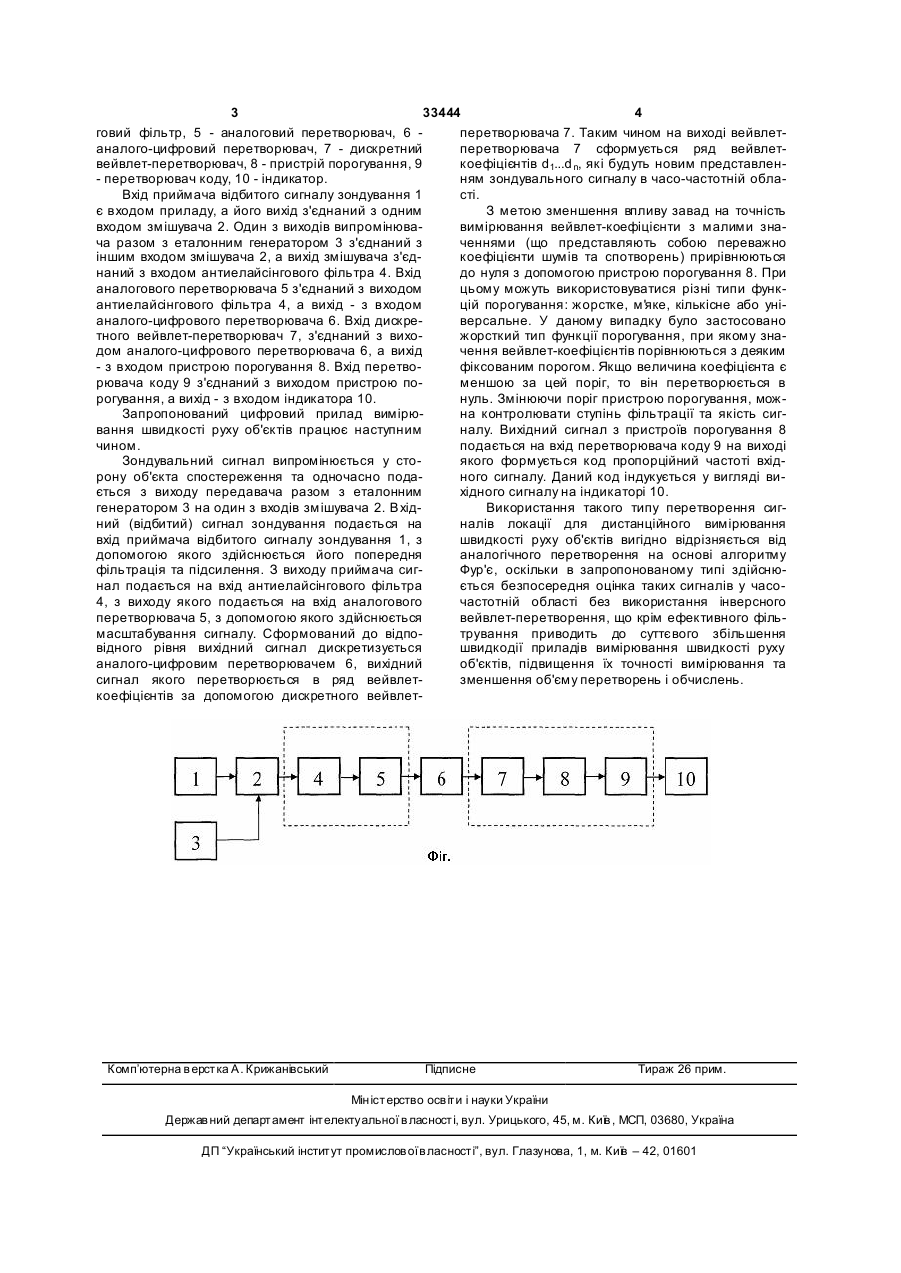
Цифровий прилад вимірювання швидкості руху об'єктів, що складається з послідовно з'єднаних приймача відбитого сигналу зондування, змішувача, вхід якого з'єднаний з виходом випромінювача разом з еталонним генератором, аналого 3 33444 4 говий фільтр, 5 - аналоговий перетворювач, 6 перетворювача 7. Таким чином на виході вейвлетаналого-цифровий перетворювач, 7 - дискретний перетворювача 7 сформується ряд вейвлетвейвлет-перетворювач, 8 - пристрій порогування, 9 коефіцієнтів d1...d n, які будуть новим представлен- перетворювач коду, 10 - індикатор. ням зондувального сигналу в часо-частотній облаВхід приймача відбитого сигналу зондування 1 сті. є входом приладу, а його вихід з'єднаний з одним З метою зменшення впливу завад на точність входом змішувача 2. Один з виходів випромінювавимірювання вейвлет-коефіцієнти з малими знача разом з еталонним генератором 3 з'єднаний з ченнями (що представляють собою переважно іншим входом змішувача 2, а вихід змішувача з'єдкоефіцієнти шумів та спотворень) прирівнюються наний з входом антиелайсінгового фільтра 4. Вхід до нуля з допомогою пристрою порогування 8. При аналогового перетворювача 5 з'єднаний з виходом цьому можуть використовуватися різні типи функантиелайсінгового фільтра 4, а вихід - з входом цій порогування: жорстке, м'яке, кількісне або уніаналого-цифрового перетворювача 6. Вхід дискреверсальне. У даному випадку було застосовано тного вейвлет-перетворювач 7, з'єднаний з вихожорсткий тип функції порогування, при якому знадом аналого-цифрового перетворювача 6, а вихід чення вейвлет-коефіцієнтів порівнюються з деяким - з входом пристрою порогування 8. Вхід перетвофіксованим порогом. Якщо величина коефіцієнта є рювача коду 9 з'єднаний з виходом пристрою поменшою за цей поріг, то він перетворюється в рогування, а вихід - з входом індикатора 10. нуль. Змінюючи поріг пристрою порогування, можЗапропонований цифровий прилад вимірюна контролювати ступінь фільтрації та якість сигвання швидкості руху об'єктів працює наступним налу. Вихідний сигнал з пристроїв порогування 8 чином. подається на вхід перетворювача коду 9 на виході Зондувальний сигнал випромінюється у стоякого формується код пропорційний частоті вхідрону об'єкта спостереження та одночасно поданого сигналу. Даний код індукується у вигляді виється з виходу передавача разом з еталонним хідного сигналу на індикаторі 10. генератором 3 на один з входів змішувача 2. ВхідВикористання такого типу перетворення сигний (відбитий) сигнал зондування подається на налів локації для дистанційного вимірювання вхід приймача відбитого сигналу зондування 1, з швидкості руху об'єктів вигідно відрізняється від допомогою якого здійснюється його попередня аналогічного перетворення на основі алгоритму фільтрація та підсилення. З виходу приймача сигФур'є, оскільки в запропонованому типі здійснюнал подається на вхід антиелайсінгового фільтра ється безпосередня оцінка таких сигналів у часо4, з виходу якого подається на вхід аналогового частотній області без використання інверсного перетворювача 5, з допомогою якого здійснюється вейвлет-перетворення, що крім ефективного фільмасштабування сигналу. Сформований до відпотрування приводить до суттєвого збільшення відного рівня вихідний сигнал дискретизується швидкодії приладів вимірювання швидкості руху аналого-цифровим перетворювачем 6, вихідний об'єктів, підвищення їх точності вимірювання та сигнал якого перетворюється в ряд вейвлетзменшення об'єму перетворень і обчислень. коефіцієнтів за допомогою дискретного вейвлет Комп’ютерна в ерстка А. Крижанівський Підписне Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDigital device for measurement of object travel speed
Автори англійськоюNakonechnyi Adrian Yosyfovych, Tyshyk Ivan Yaroslavovych
Назва патенту російськоюЦифровое устройство измерения скорости движения объектов
Автори російськоюНаконечный Адриан Иосифович, Тишик Иван Ярославович
МПК / Мітки
МПК: H03B 5/18
Мітки: цифровий, вимірювання, об'єктів, руху, швидкості, прилад
Код посилання
<a href="https://ua.patents.su/2-33444-cifrovijj-prilad-vimiryuvannya-shvidkosti-rukhu-obehktiv.html" target="_blank" rel="follow" title="База патентів України">Цифровий прилад вимірювання швидкості руху об’єктів</a>
Завадостійкий швидкодіючий цифровий вимірювальний прилад енергетичних характеристик
Номер патенту: 42556
Опубліковано: 15.10.2001
Автори: Наконечний Адріан Йосифович, Наконечний Ростислав Адріанович
МПК: G02F 7/00, G01R 19/02
Мітки: цифровий, характеристик, прилад, вимірювальний, швидкодіючий, енергетичних, завадостійкий
Формула / Реферат:
Цифровий вимірювальний прилад, що містить пристрій індикації, пристрій порогування, дискретний малохвильовий перетворювач, аналого-цифровий перетворювач, вхід якого з'єднаний з виходом аналогового перетворювача, вхід якого є входом приладу, який відрізняється тим, що в нього введено додатково перетворювач коду, вхід якого з'єднаний з виходом пристрою порогування, а вихід з'єднаний з входом пристрою індикації.
Цифровий вимірювальний прилад
Номер патенту: 37578
Опубліковано: 15.05.2001
Автори: Дудикевич Валерій Богданович, Наконечний Адріан Йосифович, Наконечний Ростислав Адріанович
МПК: G01R 21/06, G01R 19/02
Мітки: прилад, вимірювальний, цифровий
Формула / Реферат:
Цифровий вимірювальний прилад, що містить пристрій індикації, обчислювальний пристрій, аналого-цифровий перетворювач, вхід якого з'єднаний з виходом аналогового перетворювача, вхід якого є входом приладу, який відрізняється тим, що в нього введено додатково інверсний дискретний малохвильовий перетворювач, пристрій порогування і дискретний малохвильовий перетворювач, вхід і вихід якого з'єднані відповідно з виходом аналого-цифрового...
Пристрій для вимірювання довжини та швидкості руху виробів
Номер патенту: 70581
Опубліковано: 25.07.2007
Автори: Бондар Анатолій Юрьйович, Лютов Ігор Валерійович, Маслак Віктор Миколайович, Баранов Юрій Вячеславович
МПК: G01B 7/02
Мітки: швидкості, руху, вимірювання, довжини, пристрій, виробів
Формула / Реферат:
1. Пристрій для вимірювання довжини і швидкості руху виробів, який містить датчик довжини, з'єднаний входом з першим виходом джерела стабілізованих напруг, другий вихід якого підключений до першого входу блока індикації, а виходом - із входом формувача імпульсів, комутатор, вихід якого приєднаний до приводу руху виробу, який відрізняється тим, що в нього введені контролер, який складається із з'єднаних між собою центрального процесорного...
Прилад для вимірювання струму на повітряних лініях
Номер патенту: 16064
Опубліковано: 17.07.2006
Автори: Яценко Ігор Миколайович, Корсун Ігор В'ячеславович
МПК: G01R 19/00
Мітки: повітряних, прилад, струму, вимірювання, лініях
Формула / Реферат:
1. Прилад для вимірювання струму на повітряних лініях, що містить магнітопровід з намотаною у ньому вторинною обмоткою, шунтованою резистором, джерело опорної напруги, аналого-цифровий перетворювач і блок індикації, який відрізняється тим, що додатково введено підсилювач сигналу, мікроконтролер і радіопередавач, причому вхід підсилювача сигналу з’єднано безпосередньо з вторинною обмоткою магнітопроводу, а вихід - з аналого-цифровим...
Прилад для вимірювання швидкості світла відносно рухомого тіла

Номер патенту: 15596
Опубліковано: 17.07.2006
Автор: Головенець Микола Максимович
МПК: G01H 5/00
Мітки: рухомого, світла, прилад, вимірювання, швидкості, відносної, тіла
Формула / Реферат:
Прилад для вимірювання швидкості світла відносно швидкості рухомого тіла, який характеризується тим, що складається з двох генераторів з однаковою частотою випромінювання, які розташовані на єдиній площадці, один напроти другого на деякій відстані по напрямку розповсюдження сигналу, один з яких, еталонний, поєднаний з приймачем.
Попередній патент: Пристрій для теплової обробки сипучих матеріалів у середовищі газу
Наступний патент: Механізм подачі шпинделя свердлильного верстата
Випадковий патент: Електромагніт постійного струму