Вертикальний сейсмоприймач
Номер патенту: 97182
Опубліковано: 10.01.2012
Автори: Троценко Олександр Володимирович, Бровко Володимир Вікторович
Формула / Реферат
Вертикальний сейсмоприймач, що містить перетворювач вертикальної складової сейсмічного сигналу, встановлений в корпусі, заповненому проміжним матеріалом, та пристрій повороту перетворювача у вертикальній площині, який відрізняється тим, що перетворювач встановлений на кульову пружну опору з можливістю кутового переміщення в двох взаємно перпендикулярних площинах, а пристрій повороту виконаний у вигляді двох феромагнітних дисків, закріплених на перетворювачі у площинах кутового переміщення, при цьому співвісно феромагнітним дискам на корпусі встановлені дві електромагнітні котушки.
Текст
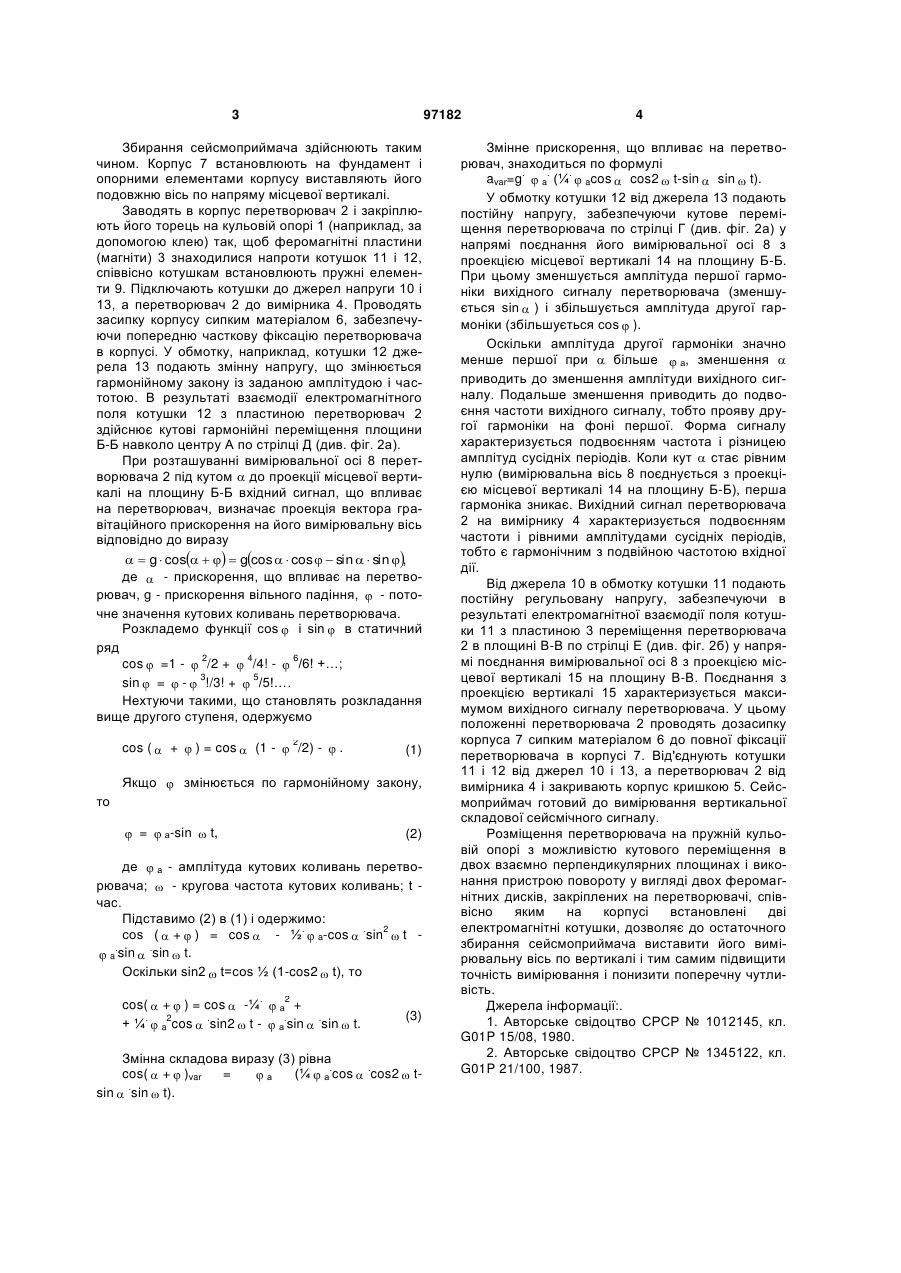
Вертикальний сейсмоприймач, що містить перетворювач вертикальної складової сейсмічного сигналу, встановлений в корпусі, заповненому проміжним матеріалом, та пристрій повороту перетворювача у вертикальній площині, який відрізняється тим, що перетворювач встановлений на кульову пружну опору з можливістю кутового переміщення в двох взаємно перпендикулярних площинах, а пристрій повороту виконаний у вигляді двох феромагнітних дисків, закріплених на перетворювачі у площинах кутового переміщення, при цьому співвісно феромагнітним дискам на корпусі встановлені дві електромагнітні котушки. (19) (21) a201005431 (22) 05.05.2010 (24) 10.01.2012 (46) 10.01.2012, Бюл.№ 1, 2012 р. (72) ТРОЦЕНКО ОЛЕКСАНДР ВОЛОДИМИРОВИЧ, БРОВКО ВОЛОДИМИР ВІКТОРОВИЧ (73) СЕВАСТОПОЛЬСЬКИЙ НАЦІОНАЛЬНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ (56) UA82500 C2; 25.04.2008 UA 69445 C2; 15.09.2004 SU 1345122 A1; 15.10.1987 SU 1012145 A1; 15.04.1983 RU 2142150 C1; 27.11.1999 RU 2117965 C1; 20.08.1998 US 4813029; 14.03.1989 3 97182 Збирання сейсмоприймача здійснюють таким чином. Корпус 7 встановлюють на фундамент і опорними елементами корпусу виставляють його подовжню вісь по напряму місцевої вертикалі. Заводять в корпус перетворювач 2 і закріплюють його торець на кульовій опорі 1 (наприклад, за допомогою клею) так, щоб феромагнітні пластини (магніти) 3 знаходилися напроти котушок 11 і 12, співвісно котушкам встановлюють пружні елементи 9. Підключають котушки до джерел напруги 10 і 13, а перетворювач 2 до вимірника 4. Проводять засипку корпусу сипким матеріалом 6, забезпечуючи попередню часткову фіксацію перетворювача в корпусі. У обмотку, наприклад, котушки 12 джерела 13 подають змінну напругу, що змінюється гармонійному закону із заданою амплітудою і частотою. В результаті взаємодії електромагнітного поля котушки 12 з пластиною перетворювач 2 здійснює кутові гармонійні переміщення площини Б-Б навколо центру А по стрілці Д (див. фіг. 2а). При розташуванні вимірювальної осі 8 перетворювача 2 під кутом до проекції місцевої вертикалі на площину Б-Б вхідний сигнал, що впливає на перетворювач, визначає проекція вектора гравітаційного прискорення на його вимірювальну вісь відповідно до виразу g cos gcos cos sin sin , де - прискорення, що впливає на перетворювач, g - прискорення вільного падіння, - поточне значення кутових коливань перетворювача. Розкладемо функції cos і sin в статичний ряд 2 4 6 cos =1 - /2 + /4! - /6! +…; 3 5 sin = - !/3! + /5!…. Нехтуючи такими, що становлять розкладання вище другого ступеня, одержуємо 2 cos ( + ) = cos (1 - /2) - . (1) Якщо змінюється по гармонійному закону, то = а-sin t, (2) де а - амплітуда кутових коливань перетворювача; - кругова частота кутових коливань; t час. Підставимо (2) в (1) і одержимо: . . 2 сos ( + ) = cos - ½ a-cos sin t . . a sin sin t. Оскільки sin2 t=cos ½ (1-cos2 t), то . 2 cos( + ) = cos -¼ а + . 2 . . . + ¼ a cos sin2 t - а sin sin t. (3) Змінна складова виразу (3) рівна . . cos( + )var = (¼ а cos cos2 tа . sin sin t). 4 Змінне прискорення, що впливає на перетворювач, знаходиться по формулі . . . avar=g a (¼ acos cos2 t-sin sin t). У обмотку котушки 12 від джерела 13 подають постійну напругу, забезпечуючи кутове переміщення перетворювача по стрілці Г (див. фіг. 2а) у напрямі поєднання його вимірювальної осі 8 з проекцією місцевої вертикалі 14 на площину Б-Б. При цьому зменшується амплітуда першої гармоніки вихідного сигналу перетворювача (зменшується sin ) і збільшується амплітуда другої гармоніки (збільшується соs ). Оскільки амплітуда другої гармоніки значно менше першої при більше а, зменшення приводить до зменшення амплітуди вихідного сигналу. Подальше зменшення приводить до подвоєння частоти вихідного сигналу, тобто прояву другої гармоніки на фоні першої. Форма сигналу характеризується подвоєнням частота і різницею амплітуд сусідніх періодів. Коли кут стає рівним нулю (вимірювальна вісь 8 поєднується з проекцією місцевої вертикалі 14 на площину Б-Б), перша гармоніка зникає. Вихідний сигнал перетворювача 2 на вимірнику 4 характеризується подвоєнням частоти і рівними амплітудами сусідніх періодів, тобто є гармонічним з подвійною частотою вхідної дії. Від джерела 10 в обмотку котушки 11 подають постійну регульовану напругу, забезпечуючи в результаті електромагнітної взаємодії поля котушки 11 з пластиною 3 переміщення перетворювача 2 в площині В-В по стрілці Е (див. фіг. 2б) у напрямі поєднання вимірювальної осі 8 з проекцією місцевої вертикалі 15 на площину В-В. Поєднання з проекцією вертикалі 15 характеризується максимумом вихідного сигналу перетворювача. У цьому положенні перетворювача 2 проводять дозасипку корпуса 7 сипким матеріалом 6 до повної фіксації перетворювача в корпусі 7. Від'єднують котушки 11 і 12 від джерел 10 і 13, а перетворювач 2 від вимірника 4 і закривають корпус кришкою 5. Сейсмоприймач готовий до вимірювання вертикальної складової сейсмічного сигналу. Розміщення перетворювача на пружній кульовій опорі з можливістю кутового переміщення в двох взаємно перпендикулярних площинах і виконання пристрою повороту у вигляді двох феромагнітних дисків, закріплених на перетворювачі, співвісно яким на корпусі встановлені дві електромагнітні котушки, дозволяє до остаточного збирання сейсмоприймача виставити його вимірювальну вісь по вертикалі і тим самим підвищити точність вимірювання і понизити поперечну чутливість. Джерела інформації:. 1. Авторське свідоцтво СРСР № 1012145, кл. G01P 15/08, 1980. 2. Авторське свідоцтво СРСР № 1345122, кл. G01P 21/100, 1987. 5 Комп’ютерна верстка А. Крижанівський 97182 6 Підписне Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюVertical seismic receiver
Автори англійськоюTrotsenko Oleksandr Volodymyrovych, Brovko Volodymyr Viktorovych
Назва патенту російськоюВертикальный сейсмоприемник
Автори російськоюТроценко Александр Владимирович, Бровко Владимир Викторович
МПК / Мітки
МПК: G01V 1/16
Мітки: вертикальний, сейсмоприймач
Код посилання
<a href="https://ua.patents.su/3-97182-vertikalnijj-sejjsmoprijjmach.html" target="_blank" rel="follow" title="База патентів України">Вертикальний сейсмоприймач</a>
Сейсмоприймач
Номер патенту: 82500
Опубліковано: 25.04.2008
Автори: Шевченко Сергій Грігорович, Троценко Олександр Володимирович
МПК: G01V 1/16
Мітки: сейсмоприймач
Формула / Реферат:
Сейсмоприймач, що містить герметичний корпус, виконаний у вигляді двох камер, заповнених робочою рідиною і газом та з’єднаних заповненим рідиною каналом із встановленим перетворювачем переміщення потоку рідини в електричний сигнал, та калібратор, виконаний у вигляді нагрівального елемента, підключеного до регульованого джерела змінного струму, який відрізняється тим, що нагрівальний елемент встановлений зовні корпусу в місці розташування газу...
Сейсмоприймач

Номер патенту: 69445
Опубліковано: 15.09.2004
Автор: Троценко Олександр Володимирович
МПК: G01V 1/16
Мітки: сейсмоприймач
Формула / Реферат:
Сейсмоприймач, що містить корпус, заповнений робочою рідиною і розрядженим інертним газом, що складається з двох циліндричних співвісних камер, з'єднаних каналом, торці якого розташовані в центрі по осі камер, та перетворювач витрати рідини, встановлений у каналі, який відрізняється тим, що діаметр і осьову довжину кожної з камер вибирають із співвідношення:де...
П’єзоелектричний сейсмоприймач
Номер патенту: 21948
Опубліковано: 10.04.2007
Автори: Трифонов Олександр Сергійович, Туманов Віктор Володимирович, Архипенко Олександр Іванович
МПК: G01V 1/16
Мітки: п'єзоелектричний, сейсмоприймач
Формула / Реферат:
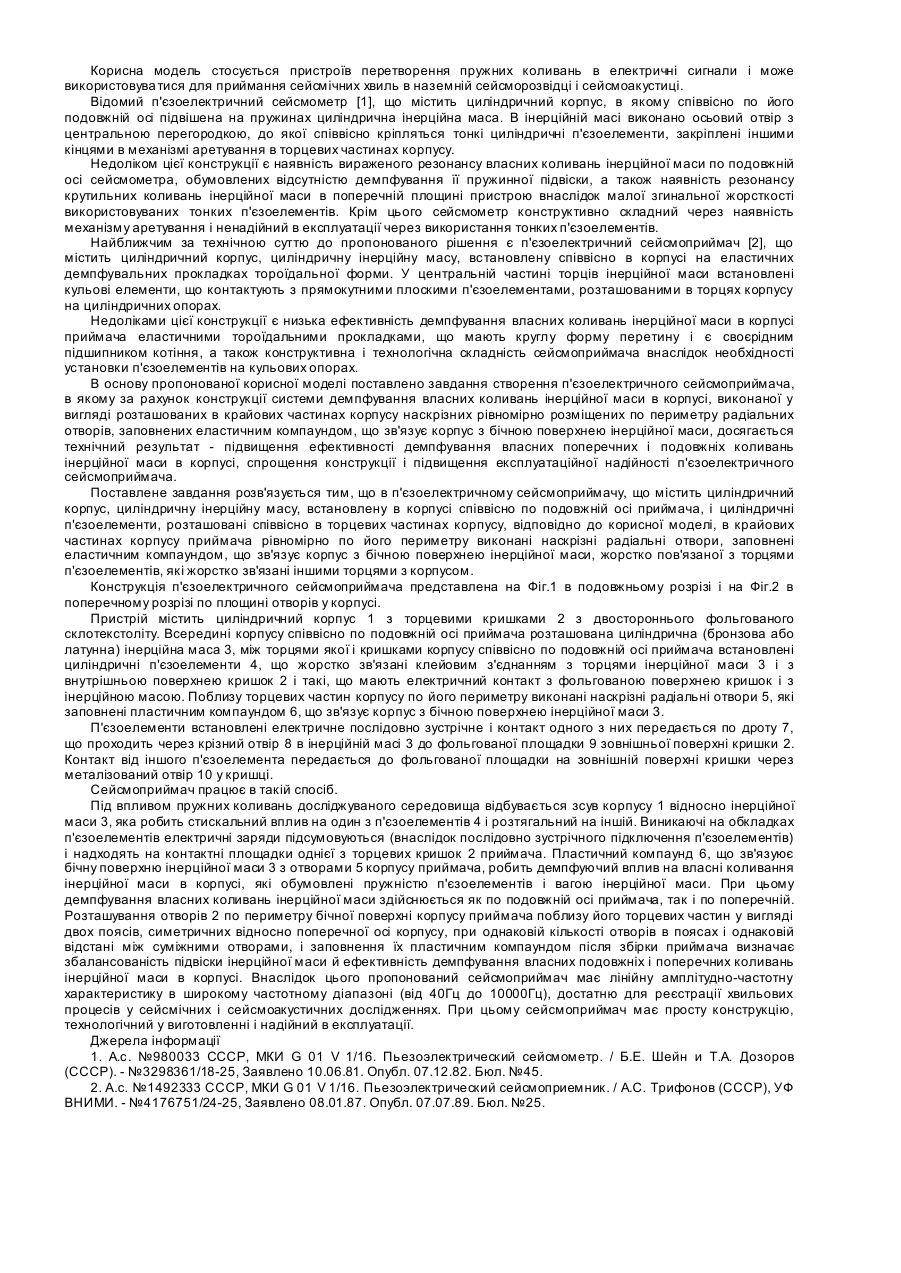
П'єзоелектричний сейсмоприймач, що містить циліндричний корпус, циліндричну інерційну масу, встановлену в корпусі співвісно по подовжній осі приймача, і циліндричні п'єзоелементи, розташовані співвісно в торцевих частинах корпусу, який відрізняється тим, що в крайових частинах корпусу приймача рівномірно по його периметру виконані наскрізні радіальні отвори, заповнені еластичним компаундом, які з'єднують корпус з бічною поверхнею інерційної...
Сейсмоприймач
Номер патенту: 30788
Опубліковано: 11.03.2008
Автори: Туманов Віктор Володимирович, Трифонов Олександр Сергійович
МПК: G01V 1/16
Мітки: сейсмоприймач
Формула / Реферат:
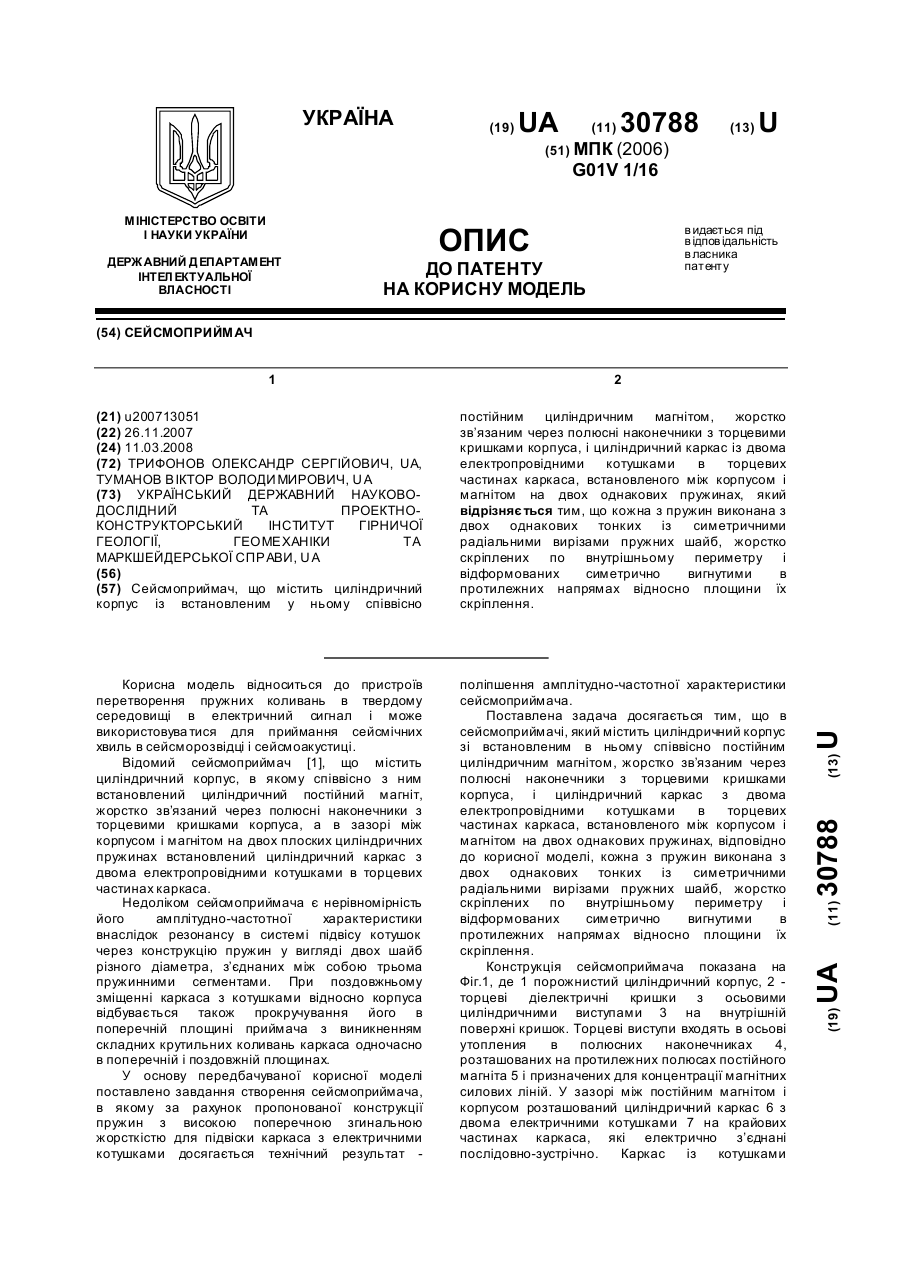
Сейсмоприймач, що містить циліндричний корпус із встановленим у ньому співвісно постійним циліндричним магнітом, жорстко зв’язаним через полюсні наконечники з торцевими кришками корпуса, і циліндричний каркас із двома електропровідними котушками в торцевих частинах каркаса, встановленого між корпусом і магнітом на двох однакових пружинах, який відрізняється тим, що кожна з пружин виконана з двох однакових тонких із симетричними радіальними...
Свердловинний сейсмоприймач
Номер патенту: 25375
Опубліковано: 10.08.2007
Автори: Архипенко Олександр Іванович, Трифонов Олександр Сергійович, Туманов Віктор Володимирович
МПК: G01V 1/40
Мітки: сейсмоприймач, свердловинний
Формула / Реферат:
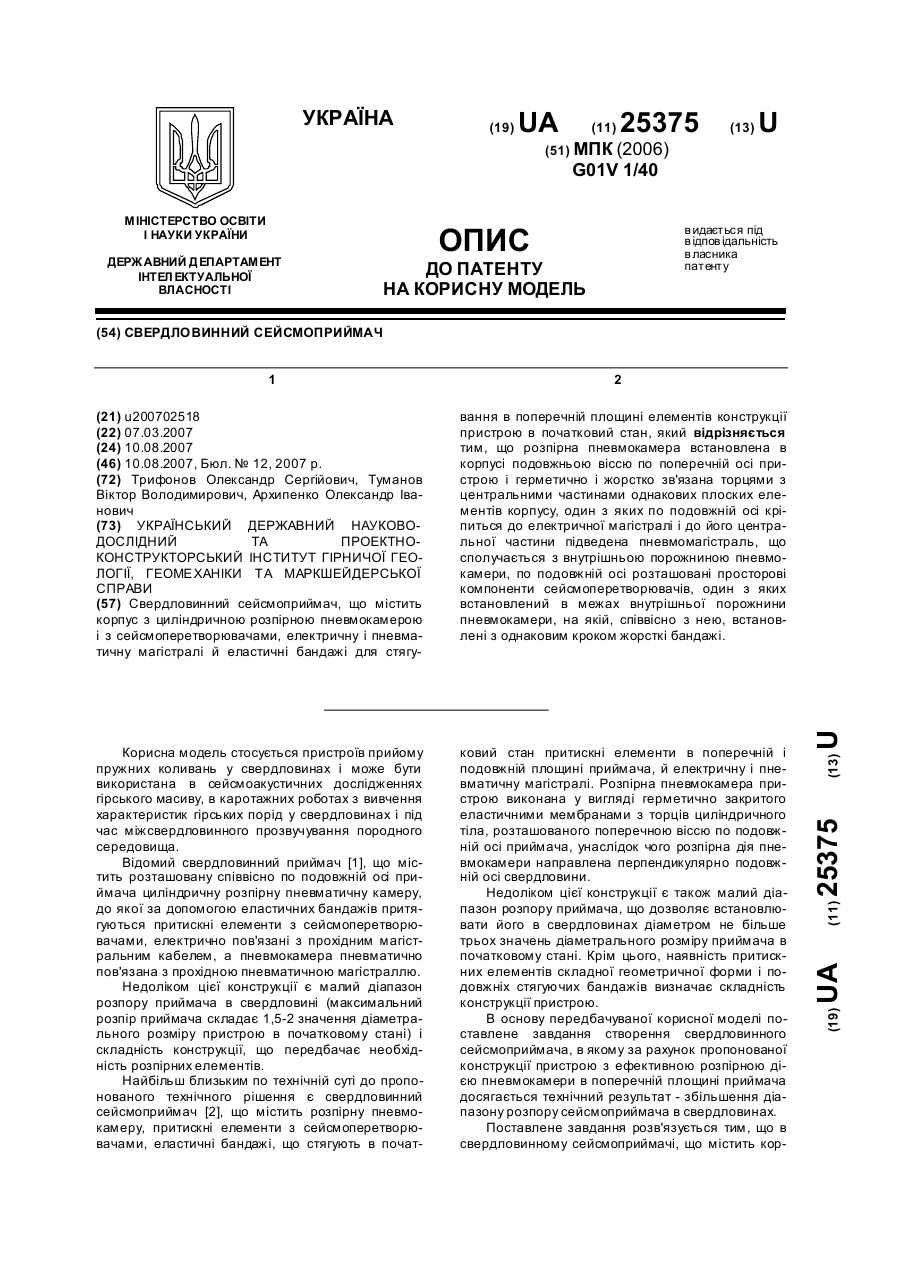
Свердловинний сейсмоприймач, що містить корпус з циліндричною розпірною пневмокамерою і з сейсмоперетворювачами, електричну і пневматичну магістралі й еластичні бандажі для стягування в поперечній площині елементів конструкції пристрою в початковий стан, який відрізняється тим, що розпірна пневмокамера встановлена в корпусі подовжньою віссю по поперечній осі пристрою і герметично і жорстко зв'язана торцями з центральними частинами однакових...
Попередній патент: Зовнішня стіна будинку
Наступний патент: Спосіб електрогідроімпульсної регенерації пористого фільтроелемента
Випадковий патент: Спосіб одержання білково-вітамінного препарату для підгодівлі тварин, збагаченого вітамінами групи в