Електромеханічна система для транспортування труб
Номер патенту: 97186
Опубліковано: 10.01.2012
Автори: Гайдаєнко Юрій Васильович, Чумак Вадим Володимирович, Шинкаренко Василь Федорович, Мірошник Оксана Леонідівна
Формула / Реферат
1. Електромеханічна система для транспортування стальних труб, що містить підключені до системи живлення і керування індукторні модулі з активними поверхнями циліндричної дугової форми та направляючі рольганги, дискретно розташовані вздовж лінії транспортування, яка відрізняється тим, що кожний індукторний модуль виконано з елементарного індуктора біжучого магнітного поля і елементарного індуктора обертового магнітного поля, причому кожний модуль підключений до незалежних підсистем керування, їх активна поверхня утворює рівномірний повітряний проміжок із трубою, а робоча поверхня направляючих рольгангів виконана сферичною.
2. Електромеханічна система для транспортування труб за п. 1, яка відрізняється тим, що елементарні дугові індуктори біжучого і обертового поля розміщені в одній площині відносно поперечного перерізу труби, а своїми нижніми частинами шарнірно закріплені між собою.
Текст
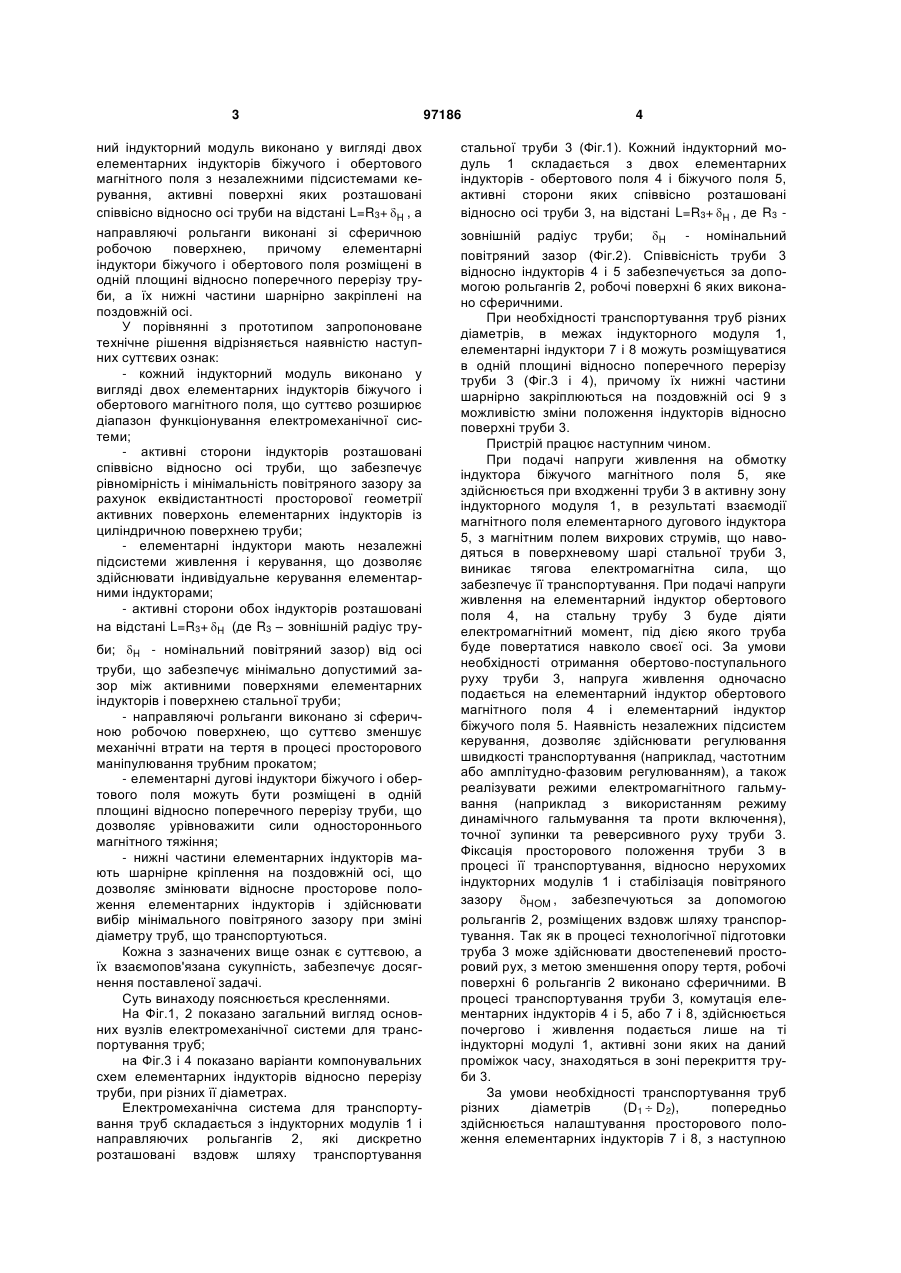
1. Електромеханічна система для транспортування стальних труб, що містить підключені до системи живлення і керування індукторні модулі з 3 ний індукторний модуль виконано у вигляді двох елементарних індукторів біжучого і обертового магнітного поля з незалежними підсистемами керування, активні поверхні яких розташовані співвісно відносно осі труби на відстані L=R3+ H , а направляючі рольганги виконані зі сферичною робочою поверхнею, причому елементарні індуктори біжучого і обертового поля розміщені в одній площині відносно поперечного перерізу труби, а їх нижні частини шарнірно закріплені на поздовжній осі. У порівнянні з прототипом запропоноване технічне рішення відрізняється наявністю наступних суттєвих ознак: - кожний індукторний модуль виконано у вигляді двох елементарних індукторів біжучого і обертового магнітного поля, що суттєво розширює діапазон функціонування електромеханічної системи; - активні сторони індукторів розташовані співвісно відносно осі труби, що забезпечує рівномірність і мінімальність повітряного зазору за рахунок еквідистантності просторової геометрії активних поверхонь елементарних індукторів із циліндричною поверхнею труби; - елементарні індуктори мають незалежні підсистеми живлення і керування, що дозволяє здійснювати індивідуальне керування елементарними індукторами; - активні сторони обох індукторів розташовані на відстані L=R3+ H (де R3 – зовнішній радіус труби; H - номінальний повітряний зазор) від осі труби, що забезпечує мінімально допустимий зазор між активними поверхнями елементарних індукторів і поверхнею стальної труби; - направляючі рольганги виконано зі сферичною робочою поверхнею, що суттєво зменшує механічні втрати на тертя в процесі просторового маніпулювання трубним прокатом; - елементарні дугові індуктори біжучого і обертового поля можуть бути розміщені в одній площині відносно поперечного перерізу труби, що дозволяє урівноважити сили одностороннього магнітного тяжіння; - нижні частини елементарних індукторів мають шарнірне кріплення на поздовжній осі, що дозволяє змінювати відносне просторове положення елементарних індукторів і здійснювати вибір мінімального повітряного зазору при зміні діаметру труб, що транспортуються. Кожна з зазначених вище ознак є суттєвою, а їх взаємопов'язана сукупність, забезпечує досягнення поставленої задачі. Суть винаходу пояснюється кресленнями. На Фіг.1, 2 показано загальний вигляд основних вузлів електромеханічної системи для транспортування труб; на Фіг.3 і 4 показано варіанти компонувальних схем елементарних індукторів відносно перерізу труби, при різних її діаметрах. Електромеханічна система для транспортування труб складається з індукторних модулів 1 і направляючих рольгангів 2, які дискретно розташовані вздовж шляху транспортування 97186 4 стальної труби 3 (Фіг.1). Кожний індукторний модуль 1 складається з двох елементарних індукторів - обертового поля 4 і біжучого поля 5, активні сторони яких співвісно розташовані відносно осі труби 3, на відстані L=R3+ H , де R3 зовнішній радіус труби; H - номінальний повітряний зазор (Фіг.2). Співвісність труби 3 відносно індукторів 4 і 5 забезпечується за допомогою рольгангів 2, робочі поверхні 6 яких виконано сферичними. При необхідності транспортування труб різних діаметрів, в межах індукторного модуля 1, елементарні індуктори 7 і 8 можуть розміщуватися в одній площині відносно поперечного перерізу труби 3 (Фіг.3 і 4), причому їх нижні частини шарнірно закріплюються на поздовжній осі 9 з можливістю зміни положення індукторів відносно поверхні труби 3. Пристрій працює наступним чином. При подачі напруги живлення на обмотку індуктора біжучого магнітного поля 5, яке здійснюється при входженні труби 3 в активну зону індукторного модуля 1, в результаті взаємодії магнітного поля елементарного дугового індуктора 5, з магнітним полем вихрових струмів, що наводяться в поверхневому шарі стальної труби 3, виникає тягова електромагнітна сила, що забезпечує її транспортування. При подачі напруги живлення на елементарний індуктор обертового поля 4, на стальну трубу 3 буде діяти електромагнітний момент, під дією якого труба буде повертатися навколо своєї осі. За умови необхідності отримання обертово-поступального руху труби 3, напруга живлення одночасно подається на елементарний індуктор обертового магнітного поля 4 і елементарний індуктор біжучого поля 5. Наявність незалежних підсистем керування, дозволяє здійснювати регулювання швидкості транспортування (наприклад, частотним або амплітудно-фазовим регулюванням), а також реалізувати режими електромагнітного гальмування (наприклад з використанням режиму динамічного гальмування та проти включення), точної зупинки та реверсивного руху труби 3. Фіксація просторового положення труби 3 в процесі її транспортування, відносно нерухомих індукторних модулів 1 і стабілізація повітряного зазору HOM , забезпечуються за допомогою рольгангів 2, розміщених вздовж шляху транспортування. Так як в процесі технологічної підготовки труба 3 може здійснювати двостепеневий просторовий рух, з метою зменшення опору тертя, робочі поверхні 6 рольгангів 2 виконано сферичними. В процесі транспортування труби 3, комутація елементарних індукторів 4 і 5, або 7 і 8, здійснюється почергово і живлення подається лише на ті індукторні модулі 1, активні зони яких на даний проміжок часу, знаходяться в зоні перекриття труби 3. За умови необхідності транспортування труб різних діаметрів (D1 D2), попередньо здійснюється налаштування просторового положення елементарних індукторів 7 і 8, з наступною 5 механічною фіксацією оптимального їх розміщення відносно заданого діаметра труби 3. Запропоноване технічне рішення, у порівнянні з прототипом, дозволяє реалізувати основні переваги, в тому числі: - зменшити відносну величину і забезпечити рівномірність повітряного зазору між активними поверхнями індукторів і труби, що дозволяє зменшити витрати потужності і тим самим підвищити тягово-енергетичні показники електромеханічної системи; - суттєво розширити функціональні можливості електромеханічної системи за рахунок реалізації різноманітних керованих просторових рухів труби (поступального, обертового, поступальнообертового, звортно-поступального, реверсивного); Комп’ютерна верстка Н. Лисенко 97186 6 - суттєво розширити технологічні можливості системи як на лініях транспортування, так і на лініях технологічної підготовки (термо- або гідроізоляції, очищення, антикорозійного покриття, фарбування, порізки, зварювання та ін.) стальних труб. Джерела інформації: 1. Dudnik M. S., Fedorov M. M., Merslikin E. S. Anwendung von Linearmotoren fur den Transport von Rohren // "Elektrie", 1977, 31, №10, 523-525, 558. 2. Patent Bundesrepublik Deutschland DE 3 3128290 Al, Int. Сl. В65G54/02/ Einrichtung zum Transportieren und Positioneren fur elektrisch leitendes, standenformiges Transportgut / A. Hidde. 03.02.1983. Підписне Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюElectromechanical system for transportation of steel pipes
Автори англійськоюShynkarenko Vasyl Fedorovych, Chumak Vadym Vladymyrovych, Haidaienko Yurii Vasyliovych, Miroshnyk Oksana Leonidivna
Назва патенту російськоюЭлектромеханическая система для транспортировки труб
Автори російськоюШинкаренко Василий Федорович, Чумак Вадим Владимирович, Гайдаенко Юрий Васильевич, Мирошник Оксана Леонидовна
МПК / Мітки
МПК: B65G 23/22, B65G 54/00, H02K 41/025
Мітки: труб, транспортування, система, електромеханічна
Код посилання
<a href="https://ua.patents.su/3-97186-elektromekhanichna-sistema-dlya-transportuvannya-trub.html" target="_blank" rel="follow" title="База патентів України">Електромеханічна система для транспортування труб</a>
Електромеханічна система для транспортування труб
Номер патенту: 56078
Опубліковано: 27.12.2010
Автори: Чумак Вадим Володимирович, Мірошник Оксана Леонідівна, Гайдаєнко Юрій Васильович, Шинкаренко Василь Федорович
МПК: H02K 41/025
Мітки: електромеханічна, система, труб, транспортування
Формула / Реферат:
1. Електромеханічна система для транспортування стальних труб, що містить підключені до системи живлення і керування індукторні модулі з активними поверхнями циліндричної дугової форми та направляючі рольганги, дискретно розташовані вздовж лінії транспортування, яка відрізняється тим, що кожний індукторний модуль виконано з елементарного індуктора біжучого магнітного поля і елементарного індуктора обертового магнітного поля, причому кожний...
Електромеханічна система аксіально-радіальної конфігурації

Номер патенту: 49630
Опубліковано: 16.09.2002
Автори: Шайтор Микола Михайлович, Рясков Юрій Іванович, Афонін Анатолій Олексійович
МПК: H02K 19/02, H02K 19/16
Мітки: електромеханічна, конфігурації, аксіально-радіальної, система
Формула / Реферат:
Електромеханічна система аксіально-радіальної конфігурації, що містить на осі обертання жорстко закріплені роторні диски з феромагнітними вставками і жорстко зв'язані з корпусом статорні диски із співвісно концентрично розташованими індукторами і кільцевими електричними обмотками, яка відрізняється тим, що кожен з індукторів, що не містить проміжків уздовж периметрів обмоток, утворений фігурою, одержуваною співвісною установкою на кільце...
Електромеханічна система “мотор-колесо”
Номер патенту: 47251
Опубліковано: 25.01.2010
Автори: Шинкаренко Василь Федорович, Попков Володимир Сергійович, Гайдаєнко Юрій Васильович, Барабаш В'ячеслав Андрійович, Богаєнко Микола Володимирович
МПК: B01F 13/00, B60K 7/00
Мітки: система, електромеханічна, мотор-колесо
Формула / Реферат:
Електромеханічна система "мотор-колесо", що містить торцевий статор електричної машини, до складу якого входить магнітопровід, навитий із стрічки електротехнічної сталі, навколо якого укладена багатофазна кільцева обмотка, розміщений коаксіально осі транспортної одиниці і закріплений на її шасі, і ротор, встановлений з проміжком відносно активної поверхні статора та жорстко зв'язаний з колесом, закріпленим на осі транспортної...
Спосіб упаковки труб для збереження та транспортування
Номер патенту: 73441
Опубліковано: 15.07.2005
Автори: Шифрін Євген Ісайович, Воробйов Микола Олексійович, Чечельницька Таїсія Іванівна, Гуляєв Юрій Геннадійович, Сіромашенко Сергій Іванович, Сівак Владислав Олегович, Паньков Дмитро Анатолійович, Коротков Андрій Миколайович
МПК: B65D 85/20, B65B 17/00
Мітки: збереження, транспортування, спосіб, упаковки, труб
Формула / Реферат:
Спосіб упаковки труб для збереження та транспортування, в якому формування пакета з труб здійснюють шляхом фіксації труб в опорах, кожна з яких має або по одному довгому, що складається з одного суцільного, фасонному елементу з декількома утвореними на двох протилежних сторонах циліндричними виїмками для декількох труб, або, відповідно, декілька коротких, складених разом, формованих деталей із щонайменше однією, утвореною на двох протилежних...
Електромеханічна система паливоподачі
Номер патенту: 40452
Опубліковано: 16.07.2001
Автори: Ісаков Глеб Володимрович, Довготелес Григорій Арсентійович, Соловйов Олександр Олександрович, Ісаков Володимир Миколайович, Удод Тарас Євгенович, Гресько Валентин Антонович
МПК: F23K 3/00, H02P 27/04
Мітки: паливоподачі, система, електромеханічна
Формула / Реферат:
Електромеханічна система паливоподачі, яка містить накопичувальні бункери, на виході яких встановлені лопатеві пиложивильники з виконавчими електродвигунами, яка відрізняється тим, що виконавчий електродвигун кожного лопатевого пиложивильника виконаний за типом асинхронного двигуна з короткозамкнутим ротором, статорні обмотки якого підключені до виходу свого напівпровідникового перетворювача частоти, вхід якого приєднаний до мережі живлення,...
Попередній патент: Спосіб віброрезонансного квазірівноканального кутового пресування та пристрій для його здійснення
Наступний патент: Пристрій з адаптивними властивостями для автоматичного керування об’єктами різного призначення
Випадковий патент: Спосіб видалення l-триптофану з крові хворих зі злоякісними новоутвореннями