Пристрій з адаптивними властивостями для автоматичного керування об’єктами різного призначення
Номер патенту: 97187
Опубліковано: 10.01.2012
Автори: Крамарь Вадим Олександрович, Краснодубець Леонід Андрійович


Формула / Реферат
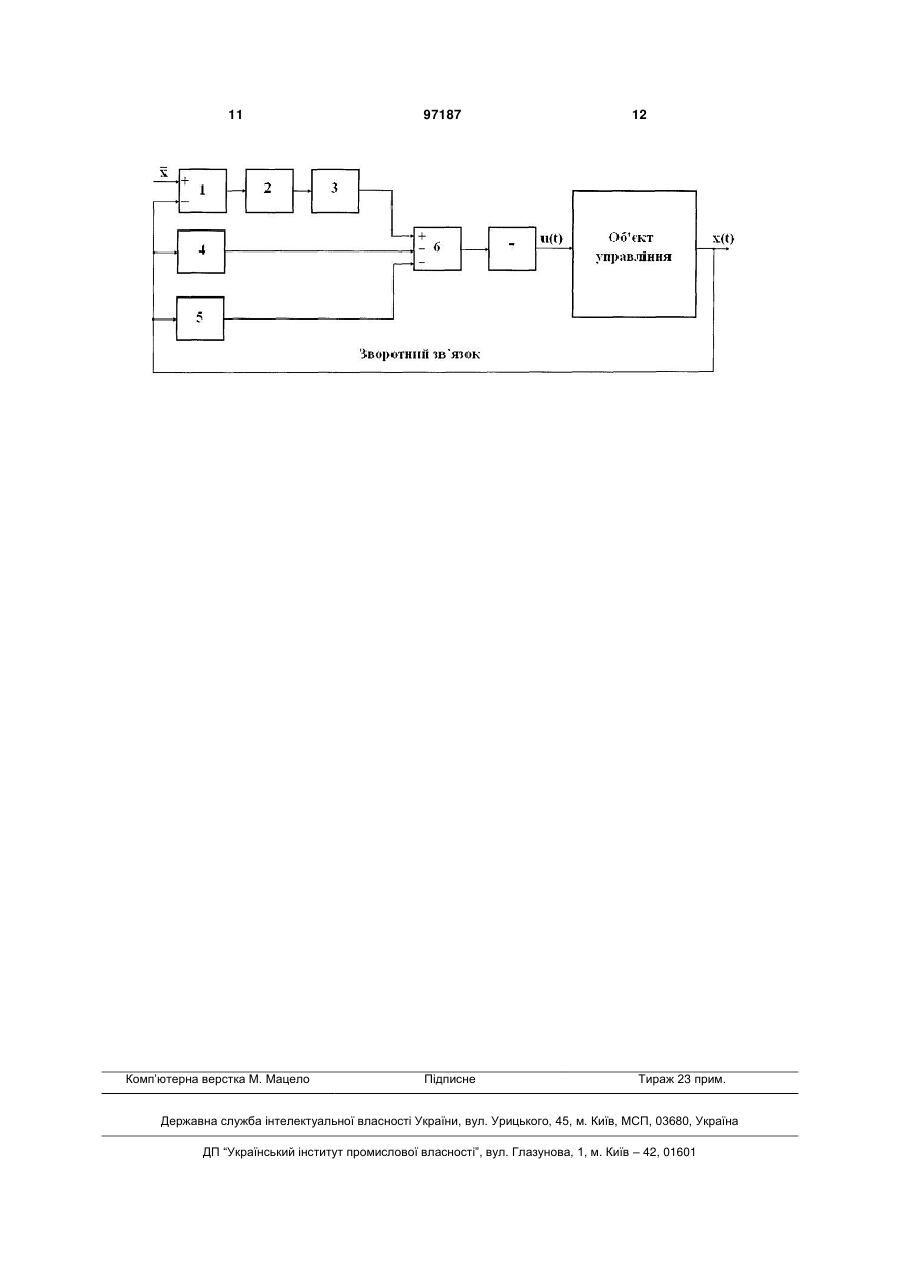
Пристрій з адаптивними властивостями для автоматичного керування об'єктами, який складається з трьох паралельних ланок - пропорційної, інтегруючої і диференціальної відповідно з коефіцієнтами передачі kр, kі, kd,, підсилювача та двох суматорів, який відрізняється тим, що введено додатковий підсилювач з коефіцієнтом передачі k, вихід якого з'єднаний з входом об'єктакерування, а вихід об'єкта керування через зворотний зв'язок з'єднаний з входами пропорційної і диференціальної ланок та інверсним входом першого суматора, вихід якого з'єднаний через підсилювач з входом інтегруючої ланки, вихід якої з'єднаний з входом другого суматора, до виходу котрого підключено додатковий підсилювач, при цьому значення коефіцієнтів kр і kі рівні значенню коефіцієнтів еталонної моделі a1 і a0, коефіцієнт kd має постійне значення одиниці, а значення коефіцієнта передачі додаткового підсилювача k знаходиться в межах від 1 до 10.
Текст
Пристрій з адаптивними властивостями для автоматичного керування об'єктами, який складається з трьох паралельних ланок - пропорційної, інтегруючої і диференціальної відповідно з коефіцієнтами передачі kр, kі, kd,, підсилювача та двох суматорів, який відрізняється тим, що введено додатковий підсилювач з коефіцієнтом передачі k, вихід якого з'єднаний з входом об'єкта керування, а вихід об'єкта керування через зворотний зв'язок з'єднаний з входами пропорційної і диференціальної ланок та інверсним входом першого суматора, вихід якого з'єднаний через підсилювач з входом інтегруючої ланки, вихід якої з'єднаний з входом другого суматора, до виходу котрого підключено додатковий підсилювач, при цьому значення коефіцієнтів kр і kі рівні значенню коефіцієнтів еталонної моделі 1 і 0, коефіцієнт kd має постійне значення одиниці, а значення коефіцієнта передачі додаткового підсилювача k знаходиться в межах від 1 до 10. Винахід належить до автоматики, а саме до автоматичних регуляторів у складі системи керування із зворотним зв'язком технічними об'єктами різної природи і призначення. Який забезпечує, за рахунок його адаптивних властивостей, підвищену якість керування в умовах параметричних і координатних збурень, які проявляються в процесі функціонування системи у вигляді зміни параметрів (властивостей) об'єкта керування і зовнішніх сил, що впливають на його стан. Відомі аналогічні пристрої для конструювання пристрою регулювання, в яких запропоновані різні підходи до реалізації пристрою керування, в т.ч. цифровий ПІД-регулятор, регулятор що використовує підхід, що дозволяє реалізувати регулятор в реальному часі, а також підхід заснований на адаптивному керуванні динамічної системи US Patent 4903192, US Patent 5325288, US Patent 2009192634 (A1), US Patent 2009319060 (A1), US Patent 4479176, US Patent 3654444. Для цілей керування в автоматиці широко використовуються регулятори - пристрої, які за допомогою зворотного зв'язку формують сигнал, відповідний помилці керування, і виконують його обробку відповідно до деякого алгоритму, що реалізовує запропонований розробником закон керування. Найбільш близьким за технічною суттю до пристрою, який заявляється, є вибраний як найближчий аналог пристрій автоматичного керування з пропорційно-інтегрально-диференціальним законом керування, відомий як ПІД-регулятор. Структура ПІД-регулятора визначається законом керування [Олссон Г., Пиани Дж. Цифровые системы автоматизации и управления. - СПб.: Невский диалект, 2001. - С. 232-238] 1 t dt ut u0 K t d Td Ti 0 dt або рівнянням, що є еквівалентним t ut kpt ki d k d 0 dt , dt (1) де u(t) - сигнал, що керує і який формується на виході ПІД-регулятора, та обчислюється відповідно до закону керування (1); et x xt - сигнал помилки керування, який формується за допомо (19) UA (11) 97187 (13) (21) a201007831 (22) 22.06.2010 (24) 10.01.2012 (46) 10.01.2012, Бюл.№ 1, 2012 р. (72) КРАСНОДУБЕЦЬ ЛЕОНІД АНДРІЙОВИЧ, КРАМАРЬ ВАДИМ ОЛЕКСАНДРОВИЧ (73) СЕВАСТОПОЛЬСЬКИЙ НАЦІОНАЛЬНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ (56) UA 26903 U; 10.10.2007 SU 1441351 A1; 30.11.1988 SU 1228073 A1; 30.04.1986 RU 2027212 C1; 20.01.1995 US 2009192634 A1; 30.07.2009 US 5325288 A; 28.06.1994 JP 2001359293 A; 26.12.2001 CN 1098520 A; 08.02.1995 Олссон Г., Пиани Д. Цифровые системы автоматизации и управления. - СПб.: Невский диалект, 2001. - С. 232-238 C2 1 3 гою негативного зворотного зв'язку і подається на вхід ПІД-регулятора; x - необхідне значення керованої координати об'єкта (виходу); u0 - поправочне значення або зміщення; Ti, Td, K - постійні часу і коефіцієнт підсилювання ПІД-регулятора; kp, ki, kd параметри налаштування ПІД-регулятора. З виразу (1) витікає, що до складу ПІДрегулятора входять два суматори і три функціональні елементи - підсилювач, інтегратор і диференціатор, сполучені паралельно. Недолік цього пристрою, а також аналогічних пристроїв (ПІ- і ПД-регуляторів) полягає в тому, що системи автоматичного керування, в яких застосовуються такі пристрої, чутливі до зміни параметрів керованих об'єктів і впливу координатних збурень. З цієї причини розрахунок параметрів налаштування ПІД-регулятора, що забезпечують бажану якість перехідних процесів, проводиться з обліком параметрів об'єкта керування, математична модель якого передбачається відомою. При цьому про бажані показники (критеріях) якості перехідного процесу не йдеться. Найближчий аналог запропонованого винаходу в умовах невизначеності параметрів об'єкта керування не дозволяє спланувати і досягнути бажаних показників якості системи автоматичного керування. В основу винаходу поставлена задача підвищення якості керування об'єктом, параметри якого є невідомими, шляхом забезпечення ефективної працездатності системи автоматичного керування на основі використання пристрою з адаптивними властивостями - адаптивного регулятора. Розв'язання цієї технічної задачі здійснюється таким чином, що структура і параметри настроювання пристрою знайдені у результаті аналітичного рішення оптимізаційної задачі в процесі конструювання адаптивного закону керування з еталонною моделлю. При цьому параметри об'єкта керування не були використані. Таким чином, в запропонованому пристрої забезпечується адаптивний процес керування об'єктом в умовах невизначеності його параметрів. Наведемо синтез у вигляді аналітичного конструювання структури і розрахунок параметрів налаштування запропонованого пристрою, який призначений для керування двигуном постійного струму з незалежним збудженням (ДПС НЗ). Модель ДПС НЗ можна зобразити у вигляді рівняння у відображеннях по Лапласу [Расчет автоматических систем. Под ред. А.В. Фатеева. Учебн. пособие для вузов. - М.:Высш. школа, 1973. - С. 21] TТ k k T Т эм ( я эм s2 в c я s 1)n(s) 1 kb вk c 1 k вk c , kД kв Т яs 1Mco s us 1 k вk c 1 k вk c яке можна при малому значенні моменту опору Мсо привести до вигляду: 2 (s +a1s+a0)n(s)=b0u(s). Останньому рівнянню відповідає диференціальне рівняння другого порядку n a1n a0n b0u , (2) 97187 4 де значення параметрів, а1, а0 і bо можуть бути отримані по конструктивних і електричних параметрах двигунів постійного струму; n - керована змінна, фізичний зміст якої - кутова швидкість вала двигуна; u - функція, що керує, яка виявляється у вигляді напруги, що подається на вхід якірного кола двигуна. Нехай початковий стан ДПС НЗ характеризується значеннями t=0: n(0)=n0, n0 n0 . (3) Ставиться завдання знайти функцію, що ке рує, у формі зворотних зв'язків u un, n , при якій система переходить з початкового стану (3) в стаціонарний стан рівноваги n n const, n n0 . При цьому необхідно, щоб процес, при якому кутова швидкість n прагне до стаціонарного зна чення n , а її похідна n - до нуля при t→tf в замкнутій системі n a1n a0n b0un, n , t 0 , t t f , nt n, n проходив у малій околиці еталонного процесу n* t n, n* t 0 , що описується диференціальним рівнянням n* 1n* 0n* 0 n, (4) 0 , 1 const 0. Завдання синтезу полягає в тому, щоб вибрати структуру адаптивного регулятора і коефіцієнти еталонної моделі (4) такими, які відповідатимуть бажаним характеристикам проектованої системи (по швидкодії, характеру перехідних процесів). Ступінь наближення регульованої системи до еталонної моделі визначатимемо відповідно до [Крутько П.Д. Новые технологии аналитического проектирования алгоритмического обеспечения систем управления движением // Управление, автоматизация и окружающая среда: Материалы международ, науч.-техн. конф., г. Севастополь, 813 сентября 2008 г. - Севастополь: Изд-во СевНТУ, 2008. - 4-10 с.] величиною квадратичного функціонала 2 1 Gu n * nt, u . (5) 2 Вимогою, що висувається, є належність функціонала (5) до малої околиці екстремуму (мінімуму) в процесі керування. З цією метою рух в околицю екстремуму організований відповідно до диференціального закону керування у вигляді: du Gu , const , (6) dt u що відповідає простому градієнтному методу пошуку екстремуму. Враховуючи, що диференціювання (5) по u дає Gu b0 [n* nt, u] , (7) u рівняння (6) можна переписати таким чином u b0 [n* nt, u] . (8) t Диференціальний закон керування у формі (8) перетворюємо до зручнішого для реалізації вигля 5 97187 ду, шляхом підстановки з (4) в (8) і інтегрування обох частин отриманого рівняння за нульових початкових умов. Маємо: u b 0 [ 0 n 1n * 0 n * nu] t , (9) * * nt, u] k[ 0 n n 1n t u k[0 n n* dt 1n* nt, u] , (10) 0 де k=b0 - коефіцієнт підсилювання. У рівняння для закону керування (10) входить * змінна n , значення якої визначаються еталонною моделлю (4). Таким чином, керуючий сигнал обчислюється без врахування стану виходу n об'єкту * керування. Виконуючи заміну n =n, введемо в систему зворотний зв'язок по змінній n. Остаточно закон керування ДПС НЗ можна записати у вигляді співвідношення: t u b 0 [ 0 n ndt 1n n] 0 t k[ 0 n ndt 1n n] . (11) 0 Структурна схема запропонованого пристрою, яку будемо називати А-регулятором, витікає із співвідношення (11) і зображена на фіг. 1. До складу А-регулятора увійшли функціональні елементи: два суматори, три підсилювача, інтегратор і функціональний елемент для обчислення похідної - диференціатор. Запропонований пристрій працює таким чином. Сигнал n , який задається, подається на суматор 1, де він підсумовується з сигналом зворотного зв'язку n(t) і формує сигнал похибки керування (t), який передається на підсилювач 2 з коефіцієнтом 0, з'єднаний послідовно з інтегратором 3. Сигнал зворотного зв'язку n(t) також паралельно подається на підсилювач 4 з коефіцієнтом 1 і диференціатор 5. Далі вихідні сигнали функціональних елементів 3, 4 і 5 підсумовуються в суматорі 6. Керуючий сигнал u(t) формується на виходи підсилювача 7, який має коефіцієнт підсилювання k. У ролі параметрів А-регулятора виступають коефіцієнти еталонних моделей 0, 1, а також коефіцієнт підсилювання k=b0. У загальному випадку коефіцієнти еталонних моделей можуть бути знайдені методом моделювання рівняння (4). При цьому в ролі критеріїв вибору можна використовувати бажані показники якості перехідних процесів в системі керування ДПС з НЗ. Оскільки в даному випадку еталонна модель має другий порядок, то можна навести її у вигляді: 1 1 1 n* 2 n* 2 n* 2 n , (12) де - постійна часу еталонної моделі; - декремент загасання. У такому разі час перехідного процесу tp у динамічної системи (12) приблизно можна обчислити по формулi tp=3...5. 6 Таким чином, задаючи бажаний час перехідного процесу tp проектованої системи і декремент загасання , можна розрахувати параметри Арегулятора по наступних формулах, які отримані в результаті порівняння (12) і (4). 1 1 0 2 ; 1 2 , (13) tp - постійна часу динамічної систе3...5 ми (12) - еталонної моделі; tp - бажаний час перехідної характеристики системи автоматичного керування з А-регулятором. Вибір значення параметра впливає на показник перерегулювання перехідної 2 характеристики системи автоматичного керування з А де 2 перерегулювання не 2 перевищує 5 %. Таким чином, при розрахунку параметрів в більшості випадків можна прийняти регулятором. При 2 0,707 . 2 Коефіцієнт підсилювання k=b0 визначається множення параметра , параметру вибору, і параметра b0, виступаючого в ролі параметра математичної моделі об'єкта керування. Якщо математична модель об'єкта відома і, отже, визначено конкретне значення b0, то завдання вибору коефіцієнта підсилювання k зводиться до обчислення . Досліджуємо вплив параметра на властивості замкнутої системи керування з А-регулятором. Відмітимо, що по побудові диференціальний закон керування (8) за заданих початкових умов описує траєкторію руху функції u, що керує, до її оптимального значення uорt. Введемо в розгляд функцію: ~t ut u , де u const , u (14) opt opt що характеризує поточне (відносно початкового стану) відхилення функції, що керує, ось її оптимальне значення, яке відповідно до (7) можна знайти з умови мінімуму функціонала (5) як рішення рівняння: Gu b0 [n* nu] 0 . (15) u Дійсно, з рівняння (15) виходить, що n* n uopt . (16) З іншого боку відповідно до (2) вираз для оптимального керування визначається співвідношенням: 1 1 1 uopt n uopt a1n a0n b0 b0 b0 яке з врахуванням (16) перетвориться до вигляду: 1 1 1 uopt n a1n a0n . (17) b0 b0 b0 Беручи до уваги і (17), перепишемо (14) таким чином 7 97187 1 1 1 ~t ut u u n a1n a0n opt b0 b0 b0 . 1 * 1 1 1 * n a1n a0n n n b0 b0 b0 b0 (18) Далі, диференціюючи обидві частини (14) і підставляючи отриманий результат разом з (17) в рівняння (8), отримаємо однорідне диференціальне рівняння для відхилення у вигляді d~ u 2 b0~ 0; ~t 0 ~0 ; t t 0 , t f . u u u (19) dt Відповідне характеристичне рівняння записується таким чином 2 s b0 0 , а його рішення визначає характеристичне число 2 s b0 . Таким чином, рішення рівняння (19) з вказаними початковими умовами можна навести у вигляді: ~ ~ exp b2t , t t , t . (20) u u 0 0 0 f 2 b0 З (20) витікає, що при s для t∞ відхилення функції, що керує, від її оптимального значення uорt по експоненті прагне до нуля. Причому швидкість цього прагнення визначається величиною 1 2 b0 , (21) a де а - постійна часу перехідного процесу, що характеризує рух функції, що керує, від її початкового значення до оптимального значення uорt. При цьому необхідною і достатньою умовою стійкості цього процесу адаптації є
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice with adaptive properties for automatic object control of different assignment
Автори англійськоюKrasnodubets Leonid Andriiovych, Kramar Vadym Oleksandrovych
Назва патенту російськоюУстройство с адаптивными свойствами для автоматического управления объектами различного назначения
Автори російськоюКраснодубец Леонид Андреевич, Крамарь Вадим Александрович
МПК / Мітки
МПК: G05B 11/36
Мітки: керування, пристрій, автоматичного, об'єктами, призначення, властивостями, адаптивними, різного
Код посилання
<a href="https://ua.patents.su/6-97187-pristrijj-z-adaptivnimi-vlastivostyami-dlya-avtomatichnogo-keruvannya-obehktami-riznogo-priznachennya.html" target="_blank" rel="follow" title="База патентів України">Пристрій з адаптивними властивостями для автоматичного керування об’єктами різного призначення</a>
Пристрій автоматичного керування регулятором напруги
Номер патенту: 37686
Опубліковано: 15.05.2001
Автори: Ремез Віталій Віталійович, Фурман Ілля Олександрович, Трунова Ірина Михайлівна, Савченко Петро Ілліч
МПК: H02M 5/02
Мітки: пристрій, автоматичного, регулятором, напруги, керування
Текст:
...Сигнал Yij є і вхідним сигналом, що вводиться в мікроконтролер 6 для визначення відповідного заданого оптимального значення напруги живлення електрообладнання даного типового варіанту одночасної його експлуатації, тобто: Yij=Xij. В мікроконтролері 6 здійснюється порівняння значення напруги Uвх на вході регулятора напруги 1 з оптимальним значенням для даного типового варіанту одночасної експлуатації електрообладнання Uопт і з...
Пристрій автоматичного керування в системі з пружним зв’язком
Номер патенту: 30618
Опубліковано: 11.03.2008
Автори: Коваль Наталія Василівна, Зачепа Юрій Володимирович, Сергієнко Сергій Анатолійович, Коваль Віталій Анатолійович
МПК: H02B 5/00
Мітки: пристрій, зв'язком, автоматичного, керування, пружним, системі
Формула / Реферат:
Пристрій автоматичного керування в системі з пружним зв'язком, що містить регулятор швидкості робочого органа механізму, вихід якого через фільтр з'єднано з регулятором моменту пружності, регулятор швидкості електродвигуна, вихід якого також через фільтр з'єднано з регулятором струму, перетворювач та об'єкт керування, який відрізняється тим, що в систему додатково введено задавач положення, який з'єднано із першим входом релейного регулятора...
Система автоматичного керування процесом екстрагування цукру з буряка
Номер патенту: 30553
Опубліковано: 25.02.2008
Автори: Ладанюк Анатолій Петрович, Заєць Наталія Анатоліївна
МПК: C13D 3/00
Мітки: система, буряка, цукру, процесом, керування, екстрагування, автоматичного
Формула / Реферат:
Система автоматичного керування процесом екстрагування цукру з буряка, що включає регулювання процесу екстрагування за вибраним критерієм на основі математичного опису об'єкта, яка відрізняється тим, що для керування температурним режимом роботи колонної дифузійної установки використовують адаптивну систему з еталонною моделлю.
Пристрій для автоматичного керування процесом відцентрового лиття труб
Номер патенту: 33124
Опубліковано: 10.06.2008
Автори: Богдан Кім Степанович, Моісеєв Юрій Васильович, Дубодєлов Віктор Іванович, Санкін Анатолій Олексійович
МПК: B22D 13/02
Мітки: труб, пристрій, відцентрового, лиття, автоматичного, процесом, керування
Формула / Реферат:
Пристрій для автоматичного керування процесом відцентрового лиття труб, що містить відцентрову ливарну машину з приводом переміщення її по рейках в горизонтальній площині, заливальний пристрій, установлений на електромеханічних вагах з мікропроцесорним блоком вимірювання маси і керування процесом дозування та блоком задавання дози розплаву, заливальний жолоб, блок керування витратою заливального пристрою, регулятор швидкості переміщення...
Пристрій автоматичного керування рекуперативним гальмуванням електрорухомого складу постійного струму
Номер патенту: 70566
Опубліковано: 15.10.2004
Автор: Устименко Дмитро Володимирович
МПК: B60L 7/00, B60L 15/20
Мітки: струму, керування, постійного, електрорухомого, пристрій, складу, рекуперативним, автоматичного, гальмуванням
Формула / Реферат:
Пристрій автоматичного керування рекуперативним гальмуванням електрорухомого складу постійного струму, що містить статичний збудник, з'єднаний виходом з незалежною обмоткою збудження тягового двигуна, а входом - з широтно-імпульсним модулятором, до входу якого під'єднаний регулятор струму рекуперації, який відрізняється тим, що він має додатковий блок завдань і початкових умов та розв'язувальний блок, які з'єднані між собою послідовно, вихід...
Попередній патент: Електромеханічна система для транспортування труб
Наступний патент: Комплект для лікування і корекції еректильної дисфункції
Випадковий патент: Комутаційний пристрій