Система логічного керування (варіанти)
Формула / Реферат
1. Система логічного керування (СЛК), яка містить з'єднані між собою: модуль входів для прийому і перетворення вхідних сигналів, модуль виходів для формування сигналів керування, логічний модуль для реалізації алгоритмів користувача, модуль діагностики для збору, аналізу і передачі діагностичної інформації від функціональних модулів, яка відрізняється тим, що вона містить модуль оптичного зв'язку для забезпечення міжканальних зв'язків, модулі з'єднані між собою за допомогою індивідуальних цифрових ліній зв'язку стандарту LVDS, при цьому кожний модуль містить щонайменше один індивідуальний двонаправлений цифровий канал зв'язку, система містить інтерфейс зовнішніх зв'язків - індивідуальні оптичні лінії зв'язку, кожний модуль містить незалежний вузол діагностики, призначений для формування діагностичних повідомлень за ознакою працездатності з прив'язкою до єдиного часу системи, з'єднаний щонайменше з одним модулем діагностики.
2. Система логічного керування, яка містить з'єднані між собою модуль входів для прийому і перетворення вхідних сигналів, модуль виходів для формування сигналів керування, логічній модуль для реалізації алгоритмів користувача, яка відрізняється тим, що вона додатково включає другий логічній модуль, при цьому логічні модулі реалізують функції алгоритмів користувача, збору, аналізу і передачі діагностичної інформації від функціональних модулів, модуль оптичного зв'язку для забезпечення міжканальних зв'язків, модулі з'єднані між собою за допомогою індивідуальних цифрових ліній зв'язку стандарту LVDS, при цьому кожний модуль містить щонайменше один індивідуальний двонаправлений цифровий канал зв'язку, система містить інтерфейс зовнішніх зв'язків - індивідуальні оптичні лінії зв'язку, кожний модуль містить незалежний вузол діагностики, призначений для формування діагностичних повідомлень за ознакою працездатності з прив'язкою до єдиного часу системи, з'єднаний з кожним логічним модулем.
3. Система логічного керування за п. 1 або 2, яка відрізняється тим, що кожний із модулів реалізований з використанням ПЛІС.
4. Система логічного керування за п. 1 або 2, яка відрізняється тим, що вона містить декілька модулів входів, виходів, діагностики, оптичного зв'язку і логічних модулів.
5. Система логічного керування за п. 1 або 2, яка відрізняється тим, що вона реалізує функції, які виконують модулі в рамках одного або декількох каналів.
6. Система логічного керування за п. 1 або 2, яка відрізняється тим, що модуль входів містить множину дубльованих каналів прийому вхідних сигналів, вузол логічної обробки і перетворення, вузол діагностики, вузол формування сигналів візуальних сповіщень, вузол цифрових каналів зв'язку з логічним модулем і модулем діагностики, дубльований вузол електроживлення.
7. Система логічного керування за п. 1 або 2, яка відрізняється тим, що модуль виходів містить множину дубльованих каналів видачі сигналів керування, вузол логічного перетворення цифрової вихідної інформації, вузол діагностики, вузол формування сигналів візуальних сповіщень, вузол цифрових каналів зв'язку з логічним модулем і модулем діагностики, дубльований вузол електроживлення.
8. Система логічного керування за п. 1 або 2, яка відрізняється тим, що логічний модуль містить множину цифрових каналів для зв'язку з модулями входів і виходів, вузол діагностики, вузол формування сигналів візуальних сповіщень, вузол цифрових каналів зв'язку з модулем діагностики і логічним модулем, вузол цифрових каналів взаємної синхронізації роботи з іншими каналами СЛК при побудові дво-, три-, чотири канальних складних систем, вузол цифрових каналів для передачі сигналів в сервер архівування, вузол прийому сигналів і синхронізації єдиного часу, дискретні вхідні/вихідні вузли прямого прийому/видачі сигналів внутрішнього і зовнішнього керування, дубльований вузол електроживлення.
9. Система логічного керування за п. 1, яка відрізняється тим, що модуль діагностики містить множину цифрових каналів для зв'язку з вхідними, вихідними і логічним модулями, вузол діагностики, вузол формування сигналів візуальних сповіщень, вузол цифрових каналів для передачі сигналів в сервер архівування, дискретні вхідні/вихідні вузли прямого прийому/видачі сигналів внутрішнього і зовнішнього керування, вхідні ланцюги і вузли приймання сигналів датчиків температури, задимлення і контролю доступу до СЛК, вузол прийому сигналів і синхронізації єдиного часу, дубльований вузол електроживлення.
10. Система логічного керування за п. 1 або 2, яка відрізняється тим, що модуль оптичного зв'язку містить канали зв'язку з кожним логічним модулем, вузол логічної обробки і розподілення потоків інформації, вузол діагностики, вузол цифрових каналів зв'язку з зовнішніми модулями оптичного зв'язку, встановленими в інших шасі і шафах при побудові складних багатоканальних систем, дубльований вузол електроживлення.
11. Система логічного керування за п. 1 або 2, яка відрізняється тим, що модулі встановлюються в шасі, крейт, субблок з використанням системи механічного кодування посадкових місць за допомогою спеціальних роз'ємних з'єднань, де однотипні рознімачі на стійці кодуються набором механічних штифтів для однозначного визначення місця встановлення відповідного модуля.
12. Система логічного керування за п. 1 або 2, яка відрізняється тим, що кожний логічний модуль і модуль діагностики при установленні в шасі отримують ІР-адреси за допомогою набору електрично-комутовуваних перемичок на крос-платі.
13. Система логічного керування за п. 1 або 2, яка відрізняється тим, що при побудові на базовому шасі система включає наступні комплектації: проста і дубльована.
14. Система логічного керування за одним із пп. 1, 2, 13, яка відрізняється тим, що система базується на спільній роботі модулів утворюючи:
- локальне ядро, яке призначене для побудови одноканальних простих систем;
- дубльоване локальне ядро, яке призначене для побудови одноканальних простих систем з резервуванням;
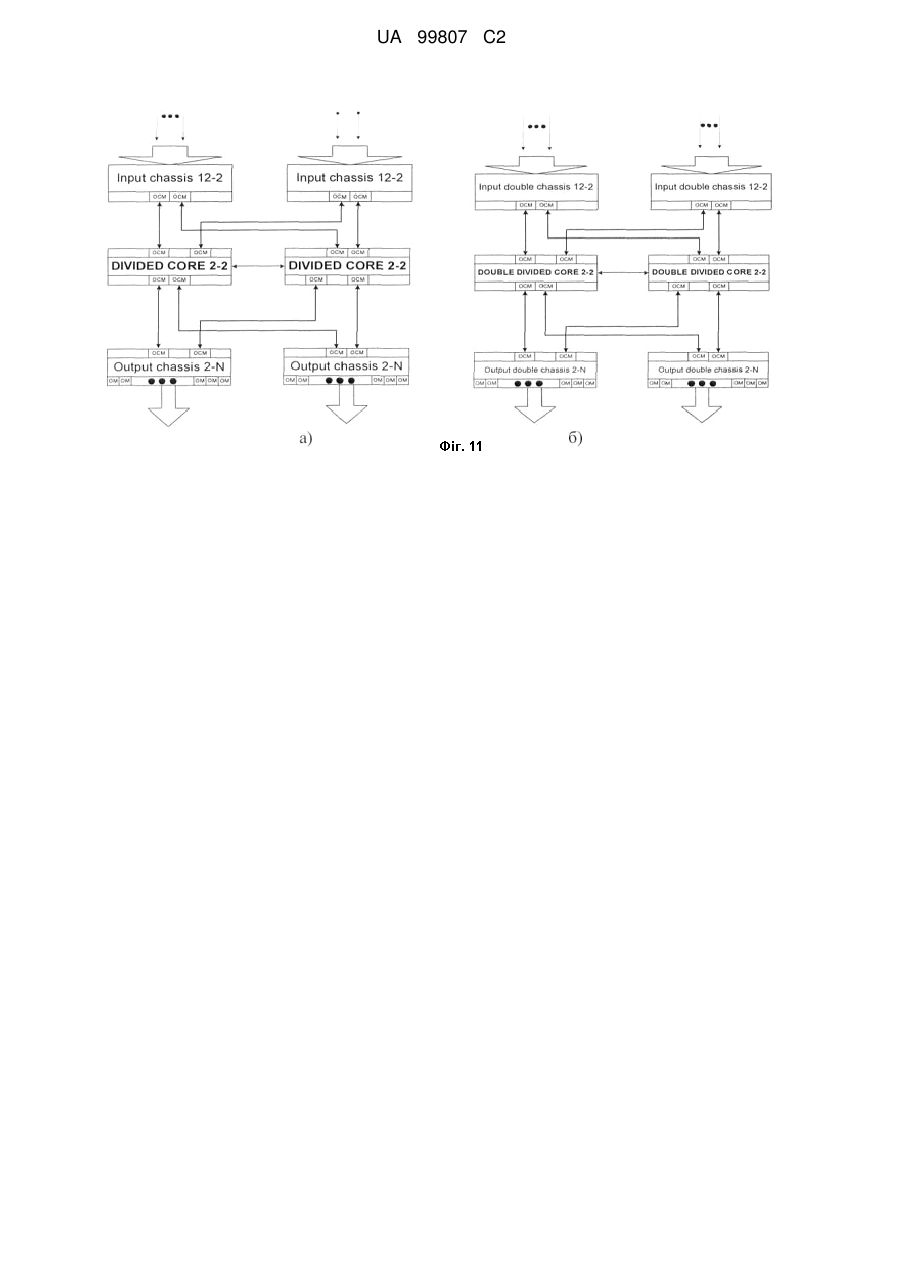
- розділене ядро, яке призначене для побудови стійких до відмов багатоканальних систем;
- дубльоване розділене ядро, яке призначене для побудови стійких до відмов багатоканальних систем з резервуванням;
- гібридне ядро, яке призначене для побудови нескладних багатоканальних систем;
- дубльоване гібридне ядро, яке призначене для побудови нескладних багатоканальних систем з резервуванням.
15. Система логічного керування за одним із пп. 1, 2, 13, 14, яка відрізняється тим, що в залежності від комплектації і кількості каналів система включає наступний відбір конфігурацій:
- одноканальна, одноканальна дубльована;
- двоканальна, двоканальна дубльована;
- триканальна, триканальна дубльована;
- чотириканальна, чотириканальна дубльована.
16. Система логічного керування за одним із пп. 1, 2, 13-15, яка відрізняється тим, що структура системи у всіх конфігураціях основана на вертикальній ієрархічній структурі "вхід - логіка - вихід" з множиною паралельних індивідуальних цифрових ліній зв'язку між кожними зв'язаними рівнями для незалежної паралельної передачі інформації.
17. Система логічного керування за одним із пп. 1, 2, 13-16, яка відрізняється тим, що система використовує цифрові лінії зв'язку по електричних провідниках крос-плати в межах шасі і/або оптичні лінії зв’язку між модулями різних шасі.
18. Система логічного керування за одним із пп. 1, 2, 17, яка відрізняється тим, що цифрові лінії зв'язку містять щонайменше один індивідуальний двонаправлений повнодуплексний канал зв'язку для кожного модуля.
19. Система логічного керування за п. 1, яка відрізняється тим, що кожний модуль містить щонайменше один індивідуальний двонаправлений цифровий повнодуплексний канал зв'язку з модулем діагностики та щонайменше один індивідуальний двонаправлений цифровий повнодуплексний канал зв'язку з логічним модулем.
20. Система логічного керування за п. 2, яка відрізняється тим, що кожний модуль містить щонайменше один індивідуальний двонаправлений цифровий повнодуплексний канал зв'язку з основним логічним модулем та щонайменше один індивідуальний двонаправлений цифровий повнодуплексний канал зв'язку з резервним логічним модулем.
21. Система логічного керування за п. 1, яка відрізняється тим, що логічний модуль і модуль діагностики містять щонайменше один індивідуальний двонаправлений цифровий повнодуплексний канал зв'язку між собою.
22. Система логічного керування за п. 2, яка відрізняється тим, що основний логічний модуль і резервний логічний модуль містять щонайменше один індивідуальний двонаправлений цифровий повнодуплексний канал зв'язку між собою.
23. Система логічного керування за п. 1 або 2, яка відрізняється тим, що зв'язок між модулями шасі реалізований за допомогою індивідуальних незалежних двонаправлених каналів типу "точка-точка", при цьому кожний модуль містить щонайменше одну незалежну гальванічно розв'язану від інших пару "приймач-передавач".
24. Система логічного керування за п. 1 або 2, яка відрізняється тим, що модулі з'єднуються з кожним логічним і діагностичним модулями системою друкованих провідників крос-плати, при цьому для передачі даних використовують послідовний протокол на базі UART зі стійким до відмов надлишковим кодування/декодуванням 8b/10b/8b і контролем вірогідності прийнятої і переданої інформації на основі циклічних контрольних сум (CRC).
25. Система логічного керування за п. 1 або 2, яка відрізняється тим, що фізичний рівень індивідуальних ліній зв'язку оснований на послідовному зв'язку по двійковому коду.
26. Система логічного керування за п. 1 або 2, яка відрізняється тим, що фізичний рівень лінії зв'язку оснований на диференціальному зв'язку згідно зі стандартом LVDS.
27. Система логічного керування за п. 1 або 2, яка відрізняється тим, що фізичний рівень мережі зв'язку шини оснований на топології "приймач-передавач" для кожної пари зв'язаних модулів, індивідуальні двонаправлені лінії зв'язку передають дані від одного модуля до іншого.
28. Система логічного керування за п. 1 або 2, яка відрізняється тим, що принцип побудови комп'ютерних мереж внутрішнього і зовнішнього інтерфейсу - стягнуті в точку магістралі на спеціальних серверах (технологічний, діагностичний).
29. Система логічного керування за п. 1 або 2, яка відрізняється тим, що фізична основа інтерфейсу між шасі і зовнішнім інтерфейсом - індивідуальні оптичні канали зв'язку типу "точка-точка", при цьому кожний оптичний канал "точка-точка""включає щонайменше один повнодуплексний канал зв’язку.
30. Система логічного керування за п. 1 або 2, яка відрізняється тим, що кожний логічний і діагностичний модулі незалежними оптичними каналами підключаються до двох комп'ютерних мереж, в яких два сервери незалежно один від одного здійснюють збір технологічної і діагностичної інформації та записують її в енергонезалежну пам'ять.
31. Система логічного керування за п. 1 або 2, яка відрізняється тим, що поканальні вхідні і вихідні ланцюги вводу/виводу гальванічно розділені один від одного і від корпусу модуля.
32. Система логічного керування за п. 1 або 2, яка відрізняється тим, що ланцюги діагностики і керування в кожному модулі гальванічно розділені, аж до окремого модуля діагностики шасі і окремої комп'ютерної діагностичної мережі в системі.
33. Система логічного керування за п. 1 або 2, яка відрізняється тим, що кожний із модулів для зберігання алгоритмів роботи містить енергонезалежну пам'ять.
34. Система логічного керування за п. 1 або 2, яка відрізняється тим, що система містить один, два одночасно або один з двох резервованих вводів електричного живлення.
35. Система логічного керування за п. 1 або 2, яка відрізняється тим, що СЛК включає модулі розширення, за допомогою яких система може бути реорганізована в складну вертикальну систему з вхідними електричними сигналами і вихідними цифровими сигналами для роботи в одно- та багатоканальній системі.
36. Система логічного керування за п. 1 або 2, яка відрізняється тим, що СЛК включає модулі розширення, за допомогою яких система може бути реорганізована в складну вертикальну систему з вхідними цифровими сигналами і вихідними електричними сигналами для роботи в одно- та багатоканальній системі.
37. Система логічного керування за п. 1 або 2, яка відрізняється тим, що СЛК включає модулі розширення, за допомогою яких система може бути реорганізована в надлишкову систему для застосування в критичних системах керування, керуючих системах безпеки, автоматизованих системах керування технологічними процесами на основі паралельної роботи двох та більше каналів.
38. Система логічного керування за п. 1 або 2, яка відрізняється тим, що СЛК включає модулі розширення, за допомогою яких система може бути реорганізована в надлишкову систему для застосування в критичних системах керування, керуючих системах безпеки, автоматизованих системах керування технологічними процесами, в яких вихідні сигнали формуються на основі мажоритарної логіки "1/2", "2/2", "2/3", "2/4", "3/4".
Текст
Реферат: Система логічного керування (СЛК) належить до області автоматичних пристроїв, а саме до цифрового обладнання систем контролю і керування технологічними процесами. Система логічного керування містить: модуль входів, логічний модуль, модуль діагностики, модуль виходів, модуль оптичного зв'язку, з'єднані між собою за допомогою ліній зв'язку LVDS. СЛК містить оптичні лінії зв'язку. СЛК будується на базовому шасі в двох комплектаціях: проста - в шасі розміщуються один логічний модуль і один модуль діагностики; дубльована - в шасі розміщуються два логічних модулі (основний і резервний). Система логічного керування заснована на спільній роботі модулів, які утворюють: локальне ядро, розділене ядро, гібридне ядро. Використання системи логічного керування, що пропонується, дозволить забезпечити необхідну системну функціональність, можливість багаторазового використання модулів платформи на основі ПЛІС для побудови різних систем резервування, високу надійність, безпеку, швидкодію, стійкість до накладання відмов, підвищення якості і надійності зв'язку, відділення мережі контролю і керування від мережі діагностики. UA 99807 C2 (12) UA 99807 C2 UA 99807 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до області автоматичних пристроїв, а саме до цифрового обладнання систем контролю і керування технологічними процесами. Існує безліч сфер застосування систем керування об'єктами, відмови яких можуть призвести до нещасних випадків або до загибелі людей, нанесенню шкоди навколишньому середовищу, втрати або серйозному пошкодженню обладнання. Такі системи керування належать до систем, важливих для безпеки (СВБ). Прикладами таких систем можуть бути автоматизовані системи керування технологічними процесами (АСКТП), керуючі системи безпеки (КСБ), критичні системи керування (КСК) та ін., які застосовуються в атомній і тепловій енергетиці, хімічному виробництві та ін. Звичайно такі системи вимірюють множину параметрів об'єкта керування (такі як температура, тиск і т.д.), контролюють роботу компонентів (клапани, двигуни і т.д.) і виконують керуючі функції. Для підвищення надійності таких систем використовують різні види надмірності. Наприклад, більшість існуючих систем захисту на атомних електростанціях мають як мінімум два комплекти, в кожному із яких реалізуються декілька каналів (підсистем або логічних кіл керування), які об'єднуються мажоритарними схемами. Відомий «Комплекс программно-аппаратных средств автоматизации управления технологическими процессами» (патент РФ № 2279117, МПК G05B 19/418), призначений для контролю і керування технологічними процесами. Комплекс містить об'єднані через локальну обчислювальну мережу Ethernet робочі станції і сервери на базі персональних електронних обчислювальних машин (ПЕОМ), а також контролери, з'єднані через локальну обчислювальну мережу Ethernet між собою та ПЕОМ. Кожний контролер містить модуль центрального процесора (МЦП), який призначений для керування функціональними модулями і виконавчими механізмами (ВМ), і модулі функціональні зі структурою що конфігурується, які призначені для обробки сигналів від датчиків і формування сигналів керування ВМ, які з'єднані через локальну шину VME-bus. Модуль функціональний містить схему інтерфейсу VME-bus, мезоніни вводу і мезоніни виводу, змінної кількості і структури. Модуль центрального процесора (МЦП) містить комп'ютер з мікропроцесором і програмним забезпеченням. Функціональні модулі реалізовані з використанням ПЛІС. Можливі три варіанти побудови систем на базі засобів комплексу: централізованого керування, локального керування, розподіленого керування. При цьому функції керування в різних конфігураціях реалізуються наступним чином: в конфігурації локального керування - модуль функціональний, який містить мезоніни вводу і мезоніни виводу здатен реалізувати в собі алгоритм керування, що видає команди на виконавчі механізми (ВМ) на основі даних від датчиків; в конфігурації розподіленого керування - модуль центрального процесора через модуль функціональний аналізує вхідні данні і керує виконавчими механізмами. До недоліків даного комплексу належать. Дворівнева схема організації керуючого і обчислювального процесу призводить: до зниження швидкодії через додаткові витрати часу на передачу інформації і програмної реалізації функції керування на верхньому рівні (МЦП); до зниження надійності та безпеки внаслідок великого об'єму обладнання, яке приймає участь в реалізації функцій керування, а також імовірності збоїв при дворівневій обробці інформації; до погіршення функціональної безпеки через ризики проектних дефектів в програмному забезпеченні які можуть викликати відмову по загальній причині навіть при резервуванні модулів; суміщення в одній архітектурі можливостей розподіленого та локального керування призводить до збільшення вартості обладнання. МЦП побудований на універсальних мікропроцесорах і є виробом на «м'якій» програмованій логіці, якому притаманні всі його недоліки: послідовна обробка даних, циклічність, використання переривань і т. ін. Для комплексу притаманна можливість дистанційного конфігурування і заміни програмного забезпечення нижнього рівня, що не виключає імовірність кібератаки на технологічне обладнання вірусами типу Stuxnet та ін. Використання стандартних інтерфейсів внутрішнього зв'язку (в шасі, крейті та ін.) - шина VME-bus, внутрішнього зв'язку (між шасі, крейтами та ін.) - RS - 232(485), інтерфейс міжканального обміну - MIL-STD 1553D приводить до зниження функціональної безпеки та стійкості і надійності зв'язку, оскільки вони можуть бути джерелом уразливості, що використовують при атаках на систему. Відсутня мережа єдиного часу та незалежні засоби діагностування. Найбільш близьким аналогом є «Усовершенствованная логическая система» по патенту US № 7870299, МПК G06F3/00, яка містить вхідні і вихідні ланки, які вбудовані у вхідні і вихідні плати відповідно, логічну схему керування, розміщену на друкованій платі, які з'єднані між собою за допомогою внутрішньої шини з можливістю резервування. Інтерфейс внутрішнього 1 UA 99807 C2 5 10 15 20 25 30 35 40 45 50 55 60 зв'язку (в шасі, крейті та ін.) - дубльована цифрова шина (основна і тестова). Зовнішній інтерфейс - RS - 422, RS - 485, Modbus. Принцип побудови внутрішнього і зовнішнього інтерфейсу базується на розподілюваному середовищі з загальним доступом. Система має недостатню надійність та функціональну безпеку оскільки: - використання стандартних інтерфейсів між елементами шасі на основі розподілюваного середовища з загальним доступом - є джерелом уразливості при атаках на систему та не виключає «інформаційні вибухи», які характерні для комп'ютерних систем в аварійних ситуаціях і відповідно приводить до зниження безпеки та стійкості і надійності зв'язку; - відсутня можливість міжканального обміну, який дозволяє локалізувати канал (шасі, блок, крейт), що дав збій або відмовив та реалізувати роздільне резервування та адаптацію (реконфігурацію). В системі відсутня мережа єдиного часу, активна діагностика вхідних і вихідних ланок, а також незалежна діагностика усієї системи. У пристроях вводу/виводу відсутнє дублювання каналів вхідних/вихідних ланок, що приводить до впливу одиничної відмови на роботу усього пристрою. Ланки діагностики і керування в пристроях гальванічно (фізично) невідокремлені. Решта систем описані в патенті UA 2468 опублікований № 4/2004, в патенті UA 22172 опублікований № 4/2007, і в патенті UA 78477 опублікований № 3/2007, документі СА № 2707373. В силу викладеного існує необхідність у створенні більш досконалих і сучасних систем, важливих для безпеки. Як правило, підвищення надійності, функціональності, швидкодії, стійкості до накладання відмов, стійкості і надійності зв'язку таких систем, призводить до їх ускладнення і збільшення витрат. Крім того, специфічність систем, важливих для безпеки, потребує значної кількості часу на проектування, розробку і верифікацію, що призводить до великих витрат на здійснення проекту. З іншої сторони, технічні характеристики первинних датчиків і виконавчих механізмів, які застосовуються в атомній і тепловій енергетиці, хімічному виробництві та ін., в сучасний час практично повністю стандартизовані і залишаються без змін протягом багатьох років. Внаслідок цього імовірні види вхідних і вихідних сигналів систем, важливих для безпеки, формують практично стаціонарну множину типів сигналів, що в свою чергу дозволяє уніфікувати функції компонентів системи для їх багаторазового використання. В основу винаходу поставлено задачу створення системи логічного керування (СЛК), що базується на апаратно-змінюваній частині, технічні і програмні засоби якої призначені для побудови систем, важливих для безпеки, шляхом комплектації її із множини ізнов (спеціально) розроблених для багаторазового використання модулів, кожен з яких реалізує уніфіковані функції, побудови зв'язків між модулями із застосуванням різних схем надмірності і резервування, розділення мереж контролю, керування і діагностики, для забезпечення необхідної системної функціональності, високої надійності, швидкодії, стійкості до накладання відмов, підвищення якості і надійності зв'язку. Поставлена задача вирішується тим, що в системі логічного керування, яка містить множину з'єднаних між собою функціональних модулів, згідно з винаходом, модуль входів призначений для прийому і перетворення вхідних сигналів, модуль виходів призначений для формування сигналів керування, логічний модуль призначений для реалізації алгоритмів користувача, модуль діагностики призначений для збору, аналізу і передачі діагностичної інформації від функціональних модулів, модуль оптичного зв'язку призначений для забезпечення міжканальних зв'язків, модулі з'єднані між собою за допомогою індивідуальних цифрових ліній зв'язку стандарту LVDS, при цьому кожний модуль містить щонайменше один індивідуальний двонаправлений цифровий канал зв'язку, крім того, система містить інтерфейс зовнішніх зв'язків - індивідуальні оптичні лінії зв'язку, кожний модуль містить незалежний вузол діагностики, призначений для формування діагностичних повідомлень за ознакою працездатності з прив'язкою до єдиного часу системи, з'єднаний щонайменше з одним модулем діагностики. В іншому варіанті згідно з винаходом система логічного керування містить модуль входів, призначений для прийому і перетворення вхідних сигналів, модуль виходів, призначений для формування сигналів керування, основний і резервний логічні модулі, призначені для реалізації алгоритмів користувача, збору, аналізу і передачі діагностичної інформації від функціональних модулів, модуль оптичного зв'язку призначений для забезпечення міжканальних зв'язків, модулі з'єднані між собою за допомогою індивідуальних цифрових ліній зв'язку стандарту LVDS, при цьому кожний модуль містить щонайменше один індивідуальний двонаправлений цифровий канал зв'язку, крім того, система містить інтерфейс зовнішніх зв'язків - індивідуальні оптичні лінії зв'язку, кожний модуль містить незалежний вузол діагностики, призначений для формування 2 UA 99807 C2 5 10 15 20 25 30 35 40 45 50 55 60 діагностичних повідомлень за ознакою працездатності з прив'язкою до єдиного часу системи, з'єднаний з кожним логічним модулем. В системі логічного керування кожний із модулів реалізований з використанням ПЛІС. Система логічного керування містить один або декілька модулів входів, виходів, діагностики, оптичного зв'язку і логічних модулів. Система логічного керування реалізує функції, які виконують модулі в рамках одного або декількох каналів. Модуль входів містить множину дубльованих каналів прийому вхідних сигналів, вузол логічної обробки і перетворення, вузол діагностики, вузол формування сигналів візуальних сповіщень, вузол цифрових каналів зв'язку з логічним модулем і модулем діагностики, дубльований вузол електроживлення. Модуль виходів містить множину дубльованих каналів видачі сигналів керування, вузол логічного перетворення цифрової вихідної інформації, вузол діагностики, вузол формування сигналів візуальних сповіщень, вузол цифрових каналів зв'язку з логічним модулем і модулем діагностики, дубльований вузол електроживлення. Логічний модуль містить множину цифрових каналів для зв'язку з модулями входів і виходів, вузол діагностики, вузол формування сигналів візуальних сповіщень, вузол цифрових каналів зв'язку з модулем діагностики і логічним модулем, вузол цифрових каналів взаємної синхронізації роботи з іншими каналами СЛК при побудові дво-, три-, чотириканальних складних систем, вузол цифрових каналів для передачі сигналів в сервер архівування, вузол прийому сигналів і синхронізації єдиного часу, дискретні вхідні/вихідні вузли прямого прийому/видачі сигналів внутрішнього і зовнішнього керування, дубльований вузол електроживлення. Модуль діагностики містить множину цифрових каналів для зв'язку з вхідними, вихідними і логічним модулями, вузол діагностики, вузол формування сигналів візуальних сповіщень, вузол цифрових каналів для передачі сигналів в сервер архівування, дискретні вхідні/вихідні вузли прямого прийому/видачі сигналів внутрішнього і зовнішнього керування, вхідні ланцюги і вузли приймання сигналів датчиків температури, задимлення і контролю доступу до СЛЬС, вузол прийому сигналів і синхронізації єдиного часу, дубльований вузол електроживлення. Модуль оптичного зв'язку містить канали зв'язку з кожним логічним модулем, вузол логічної обробки і розподілення потоків інформації, вузол діагностики, вузол цифрових каналів зв'язку з зовнішніми модулями оптичного зв'язку, встановленими в інших шасі і шафах при побудові складних багатоканальних систем, дубльований вузол електроживлення. Модулі встановлюються в шасі, крейт, субблоках з використанням системи механічного кодування посадкових місць за допомогою роз'ємних з'єднань, де однотипні рознімачі на стійці кодуються набором механічних штифтів для однозначного визначення місця встановлення відповідного модуля. Кожний логічний модуль і модуль діагностики при установленні в шасі отримують IP-адреси за допомогою набору електрично-комутовуваних перемичок на крос-платі. При побудові на базовому шасі система включає наступні комплектації: проста і дубльована. Система логічного керування базується на спільній роботі модулів, утворюючи: - локальне ядро, яке призначене для побудови одноканальних простих систем; - дубльоване локальне ядро, яке призначене для побудови одноканальних простих систем з резервуванням; - розділене ядро, яке призначене для побудови стійких до відмов багатоканальних систем; - дубльоване розділене ядро, яке призначене для побудови стійких до відмов багатоканальних систем з резервуванням; - гібридне ядро, яке призначене для побудови нескладних багатоканальних систем; - дубльоване гібридне ядро, яке призначене для побудови нескладних багатоканальних систем з резервуванням. В залежності від комплектації і кількості каналів система включає наступний відбір конфігурацій: - одноканальна, одноканальна дубльована; - двоканальна, двоканальна дубльована; - триканальна, триканальна дубльована; - чотириканальна, чотириканальна дубльована. Структура системи у всіх конфігураціях основана на вертикальній ієрархічній структурі «вхід - логіка - вихід» з множиною паралельних індивідуальних цифрових ліній зв'язку між кожними зв'язаними рівнями для незалежної паралельної передачі інформації. Система логічного керування використовує цифрові лінії зв'язку по електричних провідниках крос-плати в межах шасі і/або оптичні лінії зв'язку між модулями різних шасі. 3 UA 99807 C2 5 10 15 20 25 30 35 40 45 50 55 60 Цифрові лінії зв'язку містять щонайменше один індивідуальний двонаправлений повнодуплексний канал зв'язку для кожного модуля. Кожний модуль містить щонайменше один індивідуальний двонаправлений цифровий повнодуплексний канал зв'язку з модулем діагностики, і щонайменше один індивідуальний двонаправлений цифровий повнодуплексний канал зв'язку з логічним модулем. Кожний модуль містить щонайменше один індивідуальний двонаправлений цифровий повнодуплексний канал зв'язку з основним логічним модулем і щонайменше один індивідуальний двонаправлений цифровий повнодуплексний канал зв'язку з резервним логічним модулем. Логічний модуль і модуль діагностики містять щонайменше один індивідуальний двонаправлений цифровий повнодуплексний канал зв'язку між собою. Основний логічний модуль і резервний логічний модуль містять щонайменше один індивідуальний двонаправлений цифровий повнодуплексний канал зв'язку між собою. Зв'язок між модулями шасі реалізований за допомогою індивідуальних незалежних двонаправлених каналів типу «точка-точка», при цьому кожний модуль містить щонайменше одну незалежну, гальванічно розв'язану від інших, пару «приймач-передавач». Модулі з'єднуються з кожним логічним і діагностичним модулями системою друкованих провідників крос-плати, при цьому для передачі даних використовують послідовний протокол на базі UART зі стійким до відмов надлишковим кодування/декодуванням 8b/10b/8b і контролем вірогідності прийнятої і переданої інформації на основі циклічних контрольних сум (CRC). Фізичний рівень індивідуальних ліній зв'язку оснований на послідовному зв'язку по двійковому коду. Фізичний рівень лінії зв'язку оснований на диференціальному зв'язку згідно зі стандартом LVDS. Фізичний рівень мережі зв'язку шини оснований на топології «приймач-передавач» для кожної пари зв'язаних модулів, індивідуальні цифрові двонаправлені лінії зв'язку передають дані від одного модуля до іншого. Принцип побудови комп'ютерних мереж внутрішнього і зовнішнього інтерфейсу - стягнуті в точку магістралі на спеціальних серверах (технологічний, діагностичний). Фізична основа інтерфейсу між шасі і зовнішнім інтерфейсом - індивідуальні оптичні канали зв'язку типу «точка-точка», при цьому кожний оптичний канал «точка-точка» включає щонайменше один повнодуплексний канал зв'язку. Кожний логічний і діагностичний модулі незалежними оптичними каналами підключаються до двох комп'ютерних мереж, в яких два серверинезалежно один від одного здійснюють збір технологічної і діагностичної інформації та записують її в енергонезалежну пам'ять. Поканальні вхідні і вихідні ланцюги вводу/виводу гальванічно розділені один від одного і від корпусу модуля. Ланцюги діагностики і керування в кожному модулі гальванічно розділені, аж до окремого модуля діагностики шасі і окремої комп'ютерної діагностичної мережі в системі. Кожний із модулів для зберігання алгоритмів роботи містить енергонезалежну пам'ять. Система містить один, два одночасно або один з двох резервованих вводів електричного живлення. СЛК включає модулі розширення, за допомогою яких система може бути реорганізована в складну вертикальну систему з вхідними електричними сигналами і вихідними цифровими сигналами для роботи в одно- та багатоканальній системі. СЛК включає модулі розширення, за допомогою яких система може бути реорганізована в складну вертикальну систему з вхідними цифровими сигналами і вихідними електричними сигналами для роботи в одно- та багатоканальній системі. СЛК включає модулі розширення, за допомогою яких система може бути реорганізована в надлишкову систему для застосування в критичних системах керування, керуючих системах безпеки, автоматизованих системах керування технологічними процесами на основі паралельної роботи двох та більше каналів. СЛК основана на роботі модулів, організованих в надлишкову систему для застосування в критичних системах керування, керуючих системах безпеки, автоматизованих системах керування технологічними процесами в яких вихідні сигнали формуються на основі мажоритарної логіки «1/2», «2/2», «2/3», «2/4», «3/4». Система логічного керування, що пропонується, відрізняється наявністю нового складу елементів і зв'язків між ними, т.б. новою сукупністю ознак, які забезпечують нові технічні властивості системи. Технічний результат - забезпечення необхідної системної функціональності, можливості багаторазового використання модулів платформи на основі ПЛІС 4 UA 99807 C2 5 10 15 20 25 30 35 40 45 50 55 для побудови різних систем резервування, високої надійності, безпеки, швидкодії, стійкості до накладання відмов, підвищення якості і надійності зв'язку, відділення мережі контролю і керування від мережі діагностики. Модульний принцип побудови СЛК і реалізації алгоритмів в ПЛІС дозволяє практично без зайвого проектувати системи простої і дубльованої комплектації. Разом з тим СЛК містить необхідні засоби, які дозволяють створювати системи з розширюваністю до 2-х, 3-х або 4-х каналів на основі «локального», «розділеного» або «гібридного» ядра системи. Побудова системи, основаної на вертикальній структурі проходження сигналів без перетинання вхідних і вихідних потоків по ланцюгу «вхід, логічна обробка, вихід» показує, що усі сигнали мають незалежні паралельні шляхи проходження. Така побудова дозволяє відокремити ланки контролю і керування від ланок діагностики, що б пошкодження або вихід із ладу будьякого із елементів діагностики не впливали на здатність системи виконувати керуючі функції. В дубльованій комплектації використовується два однакових логічних модулі (основний і резервний) з функціями основного, які абсолютно автономні. Кожний із модулів виконує функції діагностики в повному обсязі. При цьому ланки діагностики і ланки контролю і керування фізично (гальванічно) розділені. Побудова системи таким чином, що вхідні сигнали від кожного модуля входів надходять в кожний із логічних модулів (основний і резервний), проходження сигналів двома незалежними паралельними шляхами в кожному шасі показує, що вихід із ладу одного із логічних модулів не впливає на здатність системи виконати свої функції, т.б. модулі резервують один одного, при цьому кожен із них в повному обсязі виконує функції контролю і керування і функції діагностики. Організація внутрішніх і зовнішніх зв'язків яка основана на індивідуальних лініях зв'язку забезпечує безпеку, максимальну «живучість», т.б. здатність виконувати мережею свої функції в умовах несприятливого зовнішнього впливу, так як при одиничній відмові максимально відмовляє зв'язок між двома модулями. Інтерфейс внутрішнього зв'язку між модулями шасі оснований на диференціальній технології згідно зі стандартом LVDS (low-voltage differential signaling), яка використовує індивідуальні лінії для передачі сигналу. Використання малопотужних, низьковольтних ліній зв'язку стандарту LVDS - забезпечує високу швидкість передачі при низькому споживанні електричної енергії. Цифрові шини всередині шасі побудовані без використання розподілюваного середовища передачі даних. Використання стягнутих в точку магістралей (collapsed backbone) на спеціальних серверах (інформаційний, діагностичний) разом з фіксованими по часу і розміру пакетами даних виключає «інформаційні вибухи», які характерні для комп'ютерних мереж на основі розподілюваного середовища з загальним доступом. Використання в системі, що пропонується, оптичних каналів зв'язку типу «точка-точка» без використання розподілюваного оптичного середовища для організації мереженої взаємодії, вирішує проблему загального доступу, так як кожна лінія мережі знаходиться в повному об'ємі обох каналів (повнодуплексний зв'язок), що забезпечує максимально можливу швидкість. Структура каналів зв'язку суттєво підвищує стійкість і надійність зв'язку. Використання електричних і оптичних ліній зв'язку великої пропускної здатності та фіксованої потужності приводить до того, що в мережі відсутні «інформаційні вибухи», наприклад у випадку аварійної ситуації, коли потрібно передати велику кількість інформації. Використання принципу реалізації модулів на елементах «жорсткої» логіки на ПЛІС (FPGA), інтегральних мікросхемах середнього і високого ступеня інтеграції дозволяє забезпечити простоту структури, компактність і економічність, а також прозору побудову системи. Розробка логічної структури ПЛІС виконується для кожного комплекту на основі вхідних/вихідних даних, які основуються на технологічних алгоритмах об'єкту автоматизації. Реалізація алгоритмів в програмованій логічній інтегральній схемі (ПЛІС) дозволяє за допомогою спеціальних засобів розробки і програмування жорстко зафіксувати необхідні елементи схемотехніки в структурі ПЛІС для одночасної і паралельної обробки всіх необхідних алгоритмів за один цикл роботи. Використання «жорсткої» логіки ПЛІС замість мікропроцесора гарантує відсутність переривань програм і паралельну обробку інформації. При реалізації модулів з використанням ПЛІС відсутня можливість дистанційного конфігурування системи і заміни програмного забезпечення, що виключає можливість кібератаки на технологічне обладнання вірусами. Застосування сучасної бази електронних компонентів дозволило зменшити масу модулів. 5 UA 99807 C2 5 10 15 20 25 30 35 40 45 50 55 60 Використання дубльованих вузлів вводу/виводу в кожному каналі кожного модуля входів/виходів дозволяє резервувати вузли при нормальній роботі і автоматично відключати несправні, при порушеннях в роботі або відмовах електронних компонент вузла, що підвищує надійність і живучість СЛК. Використання індивідуальних дубльованих вузлів електроживлення для кожного модуля дозволяє при відмові одного із вузлів забезпечити живлення внутрішніх споживачів від справного вузла. Аналіз побудови структури СЛК дозволяє зробити висновок, що принцип незалежності реалізований на належному рівні, оскільки: - мережі контролю і керування фізично відокремлені від мереж діагностики; - використані два резервованих логічних модулі; - технічні засоби модулів фізично відокремлені; - зв'язок між модулями шасі реалізований за допомогою множини індивідуальних електричних ліній; - зв'язок між шасі реалізований за допомогою множини індивідуальних оптичних ліній; - інтерфейс міжканального обміну реалізований за допомогою індивідуальних оптичних ліній зв'язку; - дубльовані канали прийому/видачі вхідних/вихідних сигналів в модулях входів/виходів; - дубльовані вузли електроживлення модулів; - система містить один, два одночасно або один з двох резервованих вводів електричного живлення. Перелік фігур. Фіг. 1 - структурна схема конфігурування системи логічного керування в режимі: а) «локальне ядро», б) дубльоване локальне ядро». Фіг. 2 - структурна схема конфігурування системи логічного керування в режимі: а) «розділене ядро», б) дубльоване розділене ядро». Фіг. 3 - структурна схема конфігурування системи логічного керування в режимі: а) «гібридне ядро», б) дубльоване гібридне ядро». Фіг. 4 - спрощена функціональна структурна схема модуля входів. Фіг. 5 - спрощена функціональна структурна схема логічного модуля. Фіг. 6 - спрощена функціональна структурна схема модуля діагностики. Фіг. 7 - спрощена функціональна структурна схема модуля виходів. Фіг. 8 - спрощена функціональна структурна схема модуля оптичного зв'язку. Фіг. 9 - структурна схема конфігурування системи логічного керування з вхідними електричними сигналами і вихідними цифровими сигналами в: а) одноканальній системі; б) одноканальній дубльованій системі; в) двоканальній системі; г) двоканальній дубльованій системі; д) триканальній системі; е) триканальній дубльованій системі; ж) чотириканальній системі; з) чотириканальній дубльованій системі. Фіг. 10 - структурна схема конфігурування системи логічного керування з вхідними цифровими сигналами і вихідними електричними сигналами в: а) одноканальній системі; б) одноканальній дубльованій системі; в) двоканальній системі; г) двоканальній дубльованій системі; д) триканальній системі; е) триканальній дубльованій системі; ж) чотириканальній системі; з) чотириканальній дубльованій системі. Фіг. 11 - структурна схема системи логічного керування на основі паралельної роботи: а) двох каналів; б) двох каналів - дубльована; в) трьох каналів; г) трьох каналів - дубльована; д) чотирьох каналів; е) чотирьох каналів - дубльована. Фіг. 12 - схема побудови простої одноканальної СЛК: а) проста комплектація; б) дубльована комплектація. Фіг. 13 - схема побудови дубльованої одноканальної СЛК: а) проста комплектація; б) дубльована комплектація. Фіг. 14 - схема побудови одноканальної СЛК розширеної: а) по входу; б) по виходу. Фіг. 15 - схема побудови дубльованої СЛК розширеної: а) по входу; б) по виходу. Система логічного керування (фіг. 1) містить модуль 1 входів, логічний модуль 2, модуль 3 діагностики, модуль 4 виходів, модуль 5 оптичного зв'язку, з'єднані між собою за допомогою ліній 6 зв'язку LVDS. СЛК містить оптичні лінії зв'язку 7. 6 UA 99807 C2 5 10 15 20 25 30 35 40 45 50 55 60 Модуль 1 входів (AIM, DIM) (фіг. 4) містить множину дубльованих каналів 8 прийому вхідних сигналів, вузол 9 логічної обробки і перетворення (по кількості каналів), вузол 10 діагностики роботоздатності всіх вузлів модуля, вузол 11 формування сигналів сповіщень на світлодіодних індикаторах і знакосинтезуючому пристрої індикації, який розташовано на лицьовій панелі модуля і доступно для візуального зчитування інформації, вузол 12 комунікації, вузол 13 цифрових каналів зв'язку з логічним і діагностичним модулями, дубльований вузол 14 електроживлення з можливістю роботи від двох різних вводів первинного електроживлення. Логічний модуль 2 (LM) (фіг. 5) містить множину цифрових каналів 15 зв'язку з модулями входів і виходів, вузол 16 комунікації, вузол 17 логіки, вузол 18 діагностики роботоздатності всіх вузлів модуля, вузол 19 формування сигналів сповіщень на світлодіодних індикаторах і знакосинтезуючому пристрої індикації, який розташовано на лицьовій панелі модуля і доступно для візуального зчитування інформації, вузол 20 цифрових каналів зв'язку з модулем діагностики і логічним модулем, вузол 21 цифрових каналів взаємної синхронізації роботи з іншими каналами СЛК при побудові дво-, три- і чотириканальних систем, вузол 22 цифрових каналів для передачі сигналів в сервер архівування (технологічний), вузол 23 прийому сигналів і синхронізації єдиного часу, дискретні вхідні/вихідні вузли 24 прямого прийому/видачі сигналів внутрішнього і зовнішнього керування, дубльований вузол 25 електроживлення з можливістю роботи від двох різних вводів первинного електроживлення. Модуль 3 діагностики (DM) (фіг. 6) містить множину цифрових каналів 26 зв'язку з модулями входів і виходів і логічними модулями, вузол 27 логіки, вузол 28 діагностики роботоздатності всіх вузлів модуля, вузол 29 комунікації, вузол 30 формування сигналів сповіщень на світлодіодних індикаторах і знакосинтезуючому пристрої індикації, який розташовано на лицьовій панелі модуля і доступно для візуального зчитування інформації, вузол 31 цифрових каналів для передачі сигналів в сервер архівування (діагностичний), дискретні вхідні/вихідні вузли 32 прямого прийому/видачі сигналів внутрішнього і зовнішнього керування, вхідні ланцюги і вузли 33 прийому сигналів датчиків температури, задимлення і контролю доступу до СЛК, вузол 34 прийому сигналів і синхронізації єдиного часу, дубльований вузол 35 електроживлення з можливістю роботи від двох різних вводів первинного електроживлення. Модуль 4 виходів (АОМ, DOM) (фіг. 7) містить множину дубльованих каналів 36 видачі сигналів керування, вузол 37 логічного перетворення цифрової вихідної інформації (по кількості каналів), вузол 38 діагностики роботоздатності всіх вузлів модуля, вузол 39 формування сигналів сповіщень на світлодіодних індикаторах і знакосинтезуючому пристрої індикації, який розташовано на лицьовій панелі модуля і доступно для візуального зчитування інформації, вузол 40 комунікації, вузол 41 цифрових каналів зв'язку з логічним модулем і модулем діагностики, дубльований вузол 42 електроживлення з можливістю роботи від двох різних вводів первинного електроживлення. Модуль 5 оптичного зв'язку (ОСМ) (фіг. 8) містить канали 43 зв'язку з кожним логічним модулем, вузол 44 розподілення потоків інформації, вузол 45 діагностики роботоздатності всіх вузлів модуля, вузол 46 цифрових каналів зв'язку з зовнішніми модулями оптичного зв'язку, вузол 47 формування сигналів сповіщень, дубльований вузол 48 електроживлення з можливістю роботи від двох різних вводів первинного електроживлення. Система логічного керування являє собою систему, основану на архітектурі платформи з апаратно-змінюваною частиною, технічні і програмні засоби якої призначені для побудови АСКТП, КСБ, КСК, призначених для виконання самих різних задач, що пов'язані з автоматизацією промисловості: від найпростішої одноканальної нерезервованої системи на базі одного шасі до складної чотириканальної дубльованої системи для критичних додатків атомних станцій, теплових станцій, а також в нафтогазовій і хімічній промисловості та ін. Робота СЛК забезпечується спільною роботою базового набору модулів, які входять в систему, при їх нормальному функціонуванні і з'єднані з джерелом вхідних і споживачами вихідних сигналів. Система логічного керування основана на спільній роботі модулів, розділених по функціональному призначенню, кожний із яких являє собою багатошарову електронну плату з встановленими на ній радіоелектронними компонентами, утворюючи функціонально-закінчений вузол, який виконує встановлені для нього задачі в СЛК. Робота СЛК основана на вертикальній структурі проходження сигналів без перетинання вхідних і вихідних потоків по ланцюгу: вхід, логічна обробка, вихід. У відповідності з вертикальною структурою СЛК має у своєму складі наступні модулі: - вхідні; - логічні; - вихідні. 7 UA 99807 C2 5 10 15 20 25 30 35 40 45 50 55 60 Для побудови багатоканальних систем СЛК містить модулі оптичного зв'язку, для оперативного встановлення несправностей і відмов - модулі діагностики. СЛК будується на базовому шасі в двох комплектаціях: - проста: в шасі розміщуються один логічний модуль і один модуль діагностики; - дубльована: в шасі розміщуються два логічних модуля (основний і резервний). До складу шасі входить 16 модулів. В обов'язковому порядку повинні входити логічний(-і) модуль(-і) і модуль діагностики (для шасі з одним логічним модулем). Синхронна робота логічних модулів в дубльованій СЛК забезпечується каналами прямого цифрового зв'язку (оптичного, електричного) між двома логічними модулями. Синхронна робота логічних модулів в багатоканальній СЛК забезпечується каналами прямого оптичного зв'язку між двома (трьома, чотирма) логічними модулями. Система логічного керування основана на спільній роботі модулів системи і в залежності від схеми приєднання модулів до джерел та споживачів зовнішніх сигналів утворює наступні конфігурації СЛК: - локальне ядро - "local core" (фіг. 1a), призначене для побудови одноканальних простих систем; - дубльоване локальне ядро - "double local core" (фіг. 1б), призначене для побудови одноканальних простих систем з резервуванням; - розділене ядро - "divided core" (фіг. 2а), призначене для побудови стійких до відмов багатоканальних систем; - дубльоване розділене ядро - " double divided core" (фіг. 2б), призначене для побудови стійких до відмов багатоканальних систем з резервуванням; - гібридне ядро - "hybrid core" (фіг. 3а), призначене для побудови нескладних багатоканальних систем; - дубльоване гібридне ядро - "double hybrid core" (фіг. 3б), призначене для побудови нескладних багатоканальних систем з резервуванням. Незалежно від вибраної конфігурації побудови систем алгоритми керування завжди реалізовані в логічному модулі, без застосування мікроконтролерів та мікропроцесорів. Система логічного керування основана на спільній роботі модулів, що забезпечують необхідну надлишковість, яка за допомогою спеціальних модулів розширення типу ОСМ може бути реорганізована: - в складну вертикальну систему з вхідними електричними сигналами і вихідними цифровими сигналами для роботи в: - одноканальній і одноканальній дубльованій системі (фіг. 9а, 9б); - двоканальній і двоканальній дубльованій системі (фіг. 9в, 9г); - триканальній і триканальній дубльованій системі (фіг. 9д, 9е); - чотириканальній і чотириканальній дубльованій системі (фіг. 9ж, 9з); - в складну вертикальну систему з вхідними цифровими сигналами і вихідними електричними сигналами для роботи в: - одноканальній і одноканальній дубльованій системі (фіг. 10а, 10б); - двоканальній і двоканальній дубльованій системі (фіг. 10в, 10г); - триканальній і триканальній дубльованій системі (фіг. 10д, 10е); - чотириканальній і чотириканальній дубльованій системі (фіг. 10ж, 10з); - у високонадійну надлишкову систему для застосування в критичних системах керування, керуючих системах безпеки, автоматизованих системах керування технологічними процесами на основі паралельної роботи: - двох каналів і двох каналів дубльованих (фіг. 11а, 11б); - трьох каналів і трьох каналів дубльованих (фіг. 11в, 11г); - чотирьох каналів і чотирьох каналів дубльованих (фіг. 11д, 11e). Система логічного керування основана на спільній роботі модулів, організованих у високонадійну надлишкову систему для застосування в КСК, КСБ, АСКТП, в яких вихідні сигнали формуються на основі мажоритарної логіки «1/2», «2/2», «2/3», «2/4», «3/4». Проектнокомпонувальними засобами СЛК є: - шафи, шасі (крейти, субблоки), в які встановлюється змінна кількість (залежно від проекту) модулів, засоби електроживлення і комутації; - модулі - функціонально закінчені технічні засоби. Модулі встановлюються в експлуатаційно-автономний виріб - шасі, призначене для конструктивного кріплення модулів за допомогою спеціальних роз'ємних з'єднань (без використання монтажних проводів) в процесі спільного виконання ними функціональних задач в складі СЛК. 8 UA 99807 C2 5 10 15 20 25 30 35 40 45 50 55 60 Для виключення помилкового встановлення різних типів модулів застосовується система механічного кодування посадкових місць за допомогою роз'ємних з'єднань на основі набору механічних штифтів. Для ідентифікації при роботі в складі комп'ютерних мереж логічний модуль і модуль діагностики при встановленні в шасі отримують унікальні IP-адреси від набору електричнокомутованих перемичок на крос-платі. Кожний із модулів в процесі роботи може бути вилучений з робочого місця і встановлений назад без відключення електроживлення, підстроювання і порушень в роботі СЛК (режим «гарячої заміни»). Сервер безперервно контролює наявність на своїх штатних місцях усіх модулів СЛК, заявлених при конфігурації. Заміна будь-якого з модулів на аналогічний приводить до формування сигналу фіксації заміни з записом заводських номерів. Модулі входів розрізнюють по типу вхідних сигналів: цифрові входи, аналогові входи, входи датчиків температури, входи іонізаційних камер, входи потенційних сигналів. Модулі входів приймають вхідні сигнали: - струм в діапазоні, наприклад 0-20 мА; - напруга в діапазоні, наприклад -(мінус)5 - +(плюс)5 В; - напруга в діапазоні, наприклад 0-32 мВ; - дискретні сигнали типу «сухий контакт». Модулі входів містять вузли контролю справності (цілісності) вхідних ланцюгів: - для активних аналогових ланцюгів вхідного струму/напруги - за наявності струму/напруги і надходженню їх у встановленому діапазоні (а також по швидкості їх змінювання); - для пасивних дискретних ланцюгів - по контролю допоміжного струму на додатково встановленому поблизу джерела сигналу резисторі. Модулі виходів розрізнюють по типу вихідних сигналів: аналогові виходи, дискретні виходи, керування виконавчими механізмами. Модулі виходів видають вихідні сигнали: - струм в діапазоні, наприклад 0-20 мА; - напруга в діапазоні, наприклад -(мінус)5 - +(плюс)5 В; - дискретні сигнали типу «сухий контакт». Модулі виходів містять вузли контролю справності (цілісності) вихідних ланцюгів: - для активних аналогових ланцюгів вихідного струму/напруги - за наявності струму/напруги і надходженню їх у встановленому діапазоні; - для пасивних дискретних ланцюгів - по контролю допоміжного струму який протікає через навантаження від внутрішнього гальванічно розв'язаного джерела. Модулі входів і модулі виходів містять дубльовані вузли вводів/виводів в кожному каналі кожного модуля входів і виходів. При виявленні внутрішніх несправностей, які перешкоджають нормальній роботі модуля і неможливого підключення резервних внутрішніх вузлів вихідні ланки модуля переводять в неактивний безпечний стан, що виключає невірні дії на виконавчі механізми. Поканальні вхідні/вихідні ланки вводу/виводу модулів гальванічно відділені один від одного та від корпусу модуля так, щоб протистояти електромагнітним завадам, які утворюються в процесі роботи силового технологічного обладнання в технологічних приміщеннях з жорстким електромагнітним станом. Вхідні/вихідні ланцюги вводу/виводу модулів витримують гальванічно розв'язану напругу: - змінного або постійного струму, наприклад до 1500 В; - статичних розрядів постійного струму, наприклад до 6000 В. Вхідні/вихідні ланки вводу/виводу модулів гальванічно відділені один від одного та від корпусу модуля так, щоб захистити обслуговуючий персонал і внутрішні електронні елементи модулів від зовнішньої напруги (включаючи наведену напругу), які можуть з'явитися на приєднаних кабелях. Система логічного керування включає незалежну мережу діагностики, яка основана на використанні незалежних діагностичних вузлів на всіх функціональних рівнях, які вбудовані в модулі (з загальним покриттям діагностикою 95 % технічних і програмних компонент модуля), проте не мають електричних з'єднань з функціональними компонентами модуля. В модулях входів і виходів реалізована активна діагностика вхідних/вихідних ланцюгів по наявності діагностичного вихідного імпульсу струму від внутрішнього гальванічно розв'язаного джерела струму. Вузли діагностики кожного модуля за допомогою системи друкованих провідників на електронній крос-платі (motherboard) шасі з'єднуються з виділеним спеціальним модулем діагностики (в шасі з простою комплектацією) і з кожним логічним модулем (в шасі з дубльованою комплектацією), які призначені для збору і обробки інформації від діагностичних вузлів в межах шасі. Мережа діагностики СЛК основана на спільній роботі множини модулів 9 UA 99807 C2 5 10 15 20 25 30 35 40 45 50 55 діагностики і логічних модулів, з'єднаних оптичними каналами зв'язку, основаних на роботі стягнутої в точку магістралі (collapsed backbone), із спеціально виділеним для цієї мети сервером збору діагностичної інформації. Вузол діагностики кожного модуля збирає діагностичну інформацію від внутрішніх елементів діагностики і по індивідуальних лініях цифрового зв'язку передає її: - в шасі з простою комплектацією: в модуль діагностики; - в шасі з дубльованою комплектацією: в кожний із двох логічних модулів. В шасі з простою комплектацією модуль діагностики отримує діагностичну інформацію від усіх модулів шасі, компонує її в єдині діагностичні пакети і кожні 100 мс по оптичних каналах зв'язку передає їх в сервер діагностики (далі можлива передача інформації в «чорний ящик»). В шасі з дубльованою комплектацією роль модуля діагностики в повному обсязі виконує кожен з двох логічних модулів. Ланцюги діагностики і ланцюги керування гальванічно розділені в кожному модулі, аж до окремого модуля діагностики шасі і окремої комп'ютерної діагностичної мережі в системі. Система логічного керування включає мережу єдиного часу, побудовану на основі окремої гальванічно розв'язаної мережі або використовує цифрові мережі СЛК. При цьому логічні модулі і модулі діагностики містять вбудовані вузли обліку поточного часу. Синхронізація усіх вузлів окремого джерела виконується через електричні підключення крос-плати на зовнішні клеми шасі або по цифрових мережах СЛК. Кожний із модулів для зберігання алгоритмів роботи використовує енергонезалежну пам'ять, яка дозволяє кожному модулю включатися в роботу і розпочати виконання своїх функцій незалежно від наявності інших модулів і роботи цифрових каналів зв'язку. Кожний логічний і діагностичний модулі незалежними оптичними каналами підключаються до двох комп'ютерних мереж у яких два сервери незалежно один від одного здійснюють збір технологічної і діагностичної інформації і записують її в енергонезалежну пам'ять з дискретністю 10 мс. Кожний логічний модуль СЛК в будь-якій конфігурації на кожному циклі роботи по прямих оптичних каналах зв'язку передає в технологічний сервер (далі можлива передача інформації в «чорний ящик») інформацію про: - прийняті вхідні сигнали; - сформовані вихідні сигнали; - внутрішні команди. Інформація в енергонезалежну пам'ять технологічного сервера записується кожні Юмс або на основі заздалегідь встановлених критеріїв: - для дискретних сигналів - в момент змінення; - для аналогових сигналів - в момент відхилення вище заданої межі (апертури). Інформація із енергонезалежної пам'яті діагностичного і технологічного серверів в будь-який момент доступна для оперативного відображення на робочих станціях обслуговуючого персоналу за допомогою спеціального програмного забезпечення. Кожний модуль містить дубльовані вузли електроживлення. Структура СЛК у всіх конфігураціях основана на вертикальній ієрархічній структурі ядра: «вхід - логіка - вихід» з множиною паралельних індивідуальних цифрових ліній зв'язку між кожними двома зв'язаними рівнями для незалежної паралельної передачі інформації. В залежності від загальної структури апаратної частини в СЛК використовуються цифрові лінії зв'язку по електричних провідниках крос-плати і оптичні лінії зв'язку між модулями різних шасі. Зв'язки між модулями шасі здійснюється по цифрових індивідуальних незалежних двонапрямлених лініях зв'язку типу «точка - точка», для чого в кожний модуль вбудована необхідна кількість незалежних гальванічно розв'язаних від інших пар «приймач-передавач». Цифрові канали зв'язку містять щонайменше один повнодуплексний канал зв'язку для кожного модуля. Модулі з'єднуються за допомогою системи друкованих провідників на електронній крос-платі (mother-board) шасі, яка призначена для електричного з'єднання електронних компонент різних модулів і яка є основою для роботи LVDS (low-voltage differential signaling) і яка використовує для передачі даних послідовний протокол на базі UART зі стійким до відмов надлишковим кодування/декодуванням 8b/10b/8b і контролем вірогідності прийнятої і переданої інформації на основі циклічних контрольних сум (CRC). Структура зв'язків радіальна - кожний логічний і діагностичний модулі з'єднані з кожним модулем шасі. 10 UA 99807 C2 5 10 15 20 25 30 35 40 45 50 55 60 Фізична основа інтерфейсу між шасі й зовнішнім інтерфейсом - індивідуальні оптичні канали зв'язку типу «точка-точка», кожна мережна лінія будь-якого із інформаційних напрямків включає щонайменше один повнодуплексний канал зв'язку «точка-точка». Технічними засобами СЛК виключена можливість втручання з поганими намірами в роботу системи, для цього: - виключена можливість віддаленого (мережного) доступу до програм і параметрів настроювання модулів; - виключена можливість віддаленої зміни програмного забезпечення модулів. Функції. В процесі роботи система логічного керування виконує призначені для неї функції, які відібрані з наступних груп: - обробка вхідних сигналів струму і напруги; - обробка вхідних сигналів термопар і термометрів опору; - обробка вхідних сигналів детекторів іонізаційних камер; - обробка вхідних дискретних сигналів «сухий контакт»; - обробка вхідних потенціальних дискретних сигналів постійної і/або змінної напруги; - контроль стану об'єкта на основі отриманої інформації і генерування керуючих і інформаційних сигналів на виконавчі механізми і системи керування відповідно до технологічних алгоритмів; - формування вихідних аналогових сигналів струму і напруги; - формування вихідних потенціальних дискретних сигналів «сухий контакт»; - керування виконавчими механізмами; - діагностика системи; - електричний і оптичний зв'язок між компонентами системи. В СЛК перераховані функції, реалізовані в програмованій інтегральній логічній схемі (ПЛІС), яка спроектована для того, що б замовник або розробник міг її сконфігурувати після виготовлення - звідси «програмована». Модулі виконують функції вводу: - електричного струму; - параметрів датчиків температури (термопара, терморезистори, та ін.) - електричної напруги; - параметрів резистора. Модулі виконують функції виводу: - керування виходом ВМ; - керування струмом на виході; - керування напругою на виході. Кожний модуль в процесі включення в роботу і періодично в процесі роботи: - перевіряє справний стан енергонезалежної пам'яті надлишковим циклічним кодом; - перевіряє справний стан внутрішніх технічних засобів; - перевіряє справний стан вхідних/вихідних сигналів; - перевіряє справний стан ліній/каналів зв'язку; - перевіряє правильність цифрових даних, прийнятих по каналах зв'язку; - перевіряє справність логічних вузлів власної ПЛІС; - перевіряє справний стан каналів електричного живлення і їх відповідності встановленим значенням. Логічний модуль при умові наявності обумовлених комбінацій вхідних дискретних сигналів дозволяє: - блокувати (відключати) від алгоритмів формування вихідних керуючих команд будь-які вхідні сигнали (групи сигналів); - імітувати вихід за межі, які контролюються, будь яких вхідних сигналів (груп сигналів); - змінювати у визначених раніше межах будь які граничні умови формування вихідних керуючих команд; - імітувати формування будь-яких вихідних керуючих команд і/або сигналів. Принцип дії системи логічного керування. Конфігурація «локальне ядро». Вхідні сигнали від зовнішніх первинних датчиків або зовнішніх систем надходять в модулі входів, оцифровуються і по індивідуальних лініях цифрового зв'язку надходять в логічний модуль (в шасі з дубльованою комплектацією - в кожний із логічних модулів). Кожний логічний модуль обробляє вхідні сигнали у відповідності із закладеними алгоритмами і генерує цифрові сигнали, які по індивідуальних лініях цифрового зв'язку надходять в модулі виходів, які керують 11 UA 99807 C2 5 10 15 20 25 30 35 40 45 50 55 станом вихідних ключів або джерел струму, в результаті чого на вихідних клемах системи генеруються сигнали, які надходять до зовнішніх систем. Обробка «із 2» або «2 з 2» в дубльованій комплектації виконується в модулях виходів. Позначення локального ядра (фіг. 1а, 1б) складається із назви "LOCAL CORE" (або "DOUBLE LOCAL CORE" - для шасі з дубльованою комплектацією) і цифр, перша цифра означає кількість модулів входів, друга - виходів. Шасі розширення по входу. Кожний логічний модуль приймає сигнали від усіх вхідних модулів, генерує загальний потік цифрових сигналів і лініям цифрового зв'язку передає в модулі оптичного зв'язку для подальшої передачі в розділене ядро(-а). Обробка «із 2» або «2 з 2» в дубльованій комплектації виконується в логічних модулях розділеного ядра. Позначення шасі розширення по входу (фіг. 9) складається із назви "INPUT CHASSIS" (або "INPUT DOUBLE CHASSIS" - для шасі з дубльованою комплектацією) і цифр, перша цифра означає кількість модулів входів, друга - модулів оптичного зв'язку. Шасі розширення по виходу. Потоки цифрових сигналів для шасі розширення надходять по оптичних лініях цифрового зв'язку від розділеного ядра в модулі оптичного зв'язку для подальшої передачі в кожний логічний модуль. У відповідності із закладеними алгоритмами кожний логічний модуль генерує цифрові сигнали, які по індивідуальних лініях цифрового зв'язку надходять в модулі вихідних ключів або джерел струму, в результаті чого на вихідних клемах системи генеруються вихідні сигнали, які надходять до зовнішніх систем. Обробка «1 з 2» або «2 з 2» в дубльованій комплектації виконується в модулях виходів. Позначення шасі розширення по виходу (фіг. 10) складається із назви "OUTPUT CHASSIS" (або "OUTPUT DOUBLE CHASSIS" - для шасі з дубльованою комплектацією) і цифр, перша цифра означає кількість модулів оптичного зв'язку, друга - модулів виходів. Конфігурація «розділене ядро». Вхідні сигнали від зовнішніх первинних датчиків або зовнішніх систем надходять в модулі входів шасі розширення по входу, оцифровуються, обробляються в кожному логічному модулі і по оптичних лініях зв'язку надходять на входи модулів оптичного зв'язку розділеного ядра. Цифрові сигнали від модулів оптичного зв'язку по індивідуальних лініях цифрового зв'язку надходять в кожний логічний модуль розділеного ядра. Кожний логічний модуль у відповідності із закладеними алгоритмами генерує цифрові сигнали, які по індивідуальних лініях цифрового зв'язку передає в модулі оптичного зв'язку для подальшої передачі в шасі розширення по виходу, де вони керують станом вихідних ключів або джерел струму, в результаті чого вихідні клеми системи генерують вихідні сигнали, які надходять до зовнішніх систем. Позначення розділеного ядра (фіг. 2а, 2б) складається із назви "DIVIDED CORE" (або "DOUBLE DIVIDED CORE" - для шасі з дубльованою комплектацією) і цифр, перша цифра означає кількість вхідних модулів оптичного зв'язку, друга - модулів виходів. Конфігурація «гібридне ядро». Перша група вхідних сигналів від зовнішніх первинних датчиків або зовнішніх систем надходять в модулі входів шасі ядра, оцифровуються і по індивідуальних лініях цифрового зв'язку надходять в кожний логічний модуль гібридного ядра для логічної обробки у відповідності із алгоритмами замовника. Друга група вхідних сигналів від зовнішніх первинних датчиків або зовнішніх систем надходять в модулі входів шасі розширення по входу, оцифровуються і по оптичних лініях зв'язку надходять на входи модулів оптичного зв'язку розділеного ядра. Цифрові сигнали від модулів оптичного зв'язку по індивідуальних лініях цифрового зв'язку надходять в кожний логічний модуль гібридного ядра для обробки у відповідності із алгоритмами замовника. По результатах обробки вхідних сигналів у відповідності із закладеними алгоритмами кожний логічний модуль генерує першу групу цифрових сигналів, які по індивідуальних лініях цифрового зв'язку надходять в модулі виходів, де вони керують станом вихідних ключів або джерел струму, в результаті чого вихідні клеми системи генерують вихідні сигнали, які надходять до зовнішніх систем. По результатах обробки вхідних сигналів у відповідності із закладеними алгоритмами кожний логічний модуль генерує другу групу цифрових сигналів, які по індивідуальних лініях цифрового зв'язку надходять в модулі оптичного зв'язку для подальшої передачі в шасі розширення по виходу, де вони керують станом вихідних ключів або джерел струму, в результаті чого вихідні клеми системи генерують вихідні сигнали, які надходять до зовнішніх систем. 12 UA 99807 C2 5 10 15 20 25 30 35 40 45 50 55 Позначення гібридного ядра (фіг. 3а, 3б) складається із назви "HYBRID CORE" (або "DOUBLE HYBRID CORE" - для шасі з дубльованою комплектацією). Приклади побудови одноканальних систем. Проста одноканальна СЛК. Будується на базі локального ядра в простій або дубльованій комплектації (фіг. 12а, 126). Вхідні сигнали надходять на вхід системи, оцифровуються в модулях входів, обробляються по логіці додатків в кожному логічному модулі і передаються на вихід системи за допомогою модулів виходів. Дубльована одноканальна СЛК. Будується на базі двох локальних ядер в простій або дубльованій комплектації для КСК і КСБ (фіг. 13а, 13б). Вхідні сигнали синхронно надходять на вхід двох автономних підсистем (локальних ядер), оцифровуються в модулях входів, обробляються по логіці додатків в кожному логічному модулі і надходять на вихід системи за допомогою модулів виходів. Об'єднання вихідних сигналів по логіці «із 2» або «2 з 2» виконується у вихідних шафах комутації або безпосередньо на входах приймачів сигналів. Одноканальна СЛК розширена по входу і виходу. Будується на базі двох локальних ядер в простій або дубльованій комплектації (фіг. 14а, 14б). Використовується у випадках, коли кількість вхідних сигналів перевищує можливості локального ядра. Вхідні сигнали розділюються на два потоки і надходять на вхід двох автономних підсистем розширення, де оцифровуються в модулях входів і надходять на обробку по алгоритмах додатків в кожний логічний модуль розділеного ядра. Вхідні керуючі сигнали надходять на дві підсистеми розширення по виходу за допомогою оптичних модулів. В кожному логічному модулі шасі розширення по виходу сигнали розподіляються по модулях виходів. Дубльована розширена по входу і виходу СЛК. Будується на базі двох одноканальних розділених СЛК (в простій або дубльованій комплектації) для КСК і КСБ (фіг. 15а, 15б). Вхідні сигнали синхронно надходять на вхід двох автономних підсистем розширення по входу, оцифровуються в модулях входів, вводяться в два синхронно і паралельно працюючих шасі, обробляються по логіці додатків і передаються на вихід системи за допомогою шасі розширення по виходу з наступним використанням модулів виходів. Об'єднання вихідних сигналів по логіці «із 2» або «2 з 2» виконується у вихідних шафах комутації або безпосередньо на входах приймачів сигналів. Робота багатоканальних СЛК. 2-, 3-, 4-канальні СЛК будуються на основі одноканальних, які описані вище. 2-канальна СЛК. Вхідні сигнали першого каналу за допомогою модулів оптичного зв'язку із шасі розширення надходять у другий канал і навпаки (фіг. 11а, 11б). Таким чином, в кожному із розділених ядер є повний набір всіх вхідних сигналів. В алгоритмах обробки вхідні сигнали обробляються по логіці «1 з 2» або «2 з 2». Логічні модулі кожного каналу взаємно синхронізуються за допомогою спеціальних оптичних каналів зв'язку. Вихідні сигнали, сформовані кожним логічним модулем кожного розділеного ядра, за допомогою оптичних модулів зв'язку надходять в кожний із двох шасі розширення, де перед надходженням у модулі виходів обробляються по логіці «із 2» або «2 з 2». 3-канальна СЛК. Вхідні сигнали кожного із каналів за допомогою модулів оптичного зв'язку із шасі розширення надходять у всі три канали (фіг. 11в, 11г). Таким чином, в кожному із розділених ядер є повний набір всіх вхідних сигналів. В алгоритмах обробки вхідні сигнали обробляються по логіці «2 з 3», в результаті чого система стає стійка до відмови одного (будь-якого) каналу розширення. Логічні модулі кожного каналу взаємно синхронізуються за допомогою спеціальних оптичних каналів зв'язку. Вихідні сигнали, сформовані кожним логічним модулем кожного розділеного ядра, за допомогою оптичних модулів зв'язку надходять в кожний із двох (або більше) шасі розширення (загальна кількість шасі розширення по виходу визначається кількістю вихідних сигналів, які повинна генерувати СЛК), де перед надходженням у модулі виходів обробляються по логіці «2 з 3», в результаті чого СЛК стає стійкою до відмови будь-якого розділеного ядра. 4-канальна СЛК. 13 UA 99807 C2 5 10 Вхідні сигнали кожного із каналів за допомогою модулів оптичного зв'язку із шасі розширення надходять у всі чотири канали (фіг. 11д, 11е). Таким чином, в кожному із розділених ядер є повний набір всіх вхідних сигналів. В алгоритмах обробки вхідні сигнали обробляються по логіці «2 з 4», в результаті чого система стає стійкою до відмови двох каналів розширення. Логічні модулі кожного каналу взаємно синхронізуються за допомогою спеціальних оптичних каналів зв'язку. Вихідні сигнали, сформовані кожним логічним модулем кожного розділеного ядра, за допомогою оптичних модулів зв'язку надходять в кожний із двох (або більше) шасі розширення (загальна кількість шасі розширення по виходу визначається кількістю вихідних сигналів, які повинна генерувати СЛК), де перед надходженням у модулі виходів обробляються по логіці «2 з 4», в результаті чого СЛК стає стійкою до відмови 2х розділених ядер. ФОРМУЛА ВИНАХОДУ 15 20 25 30 35 40 45 50 55 60 1. Система логічного керування (СЛК), яка містить з'єднані між собою: модуль входів для прийому і перетворення вхідних сигналів, модуль виходів для формування сигналів керування, логічний модуль для реалізації алгоритмів користувача, модуль діагностики для збору, аналізу і передачі діагностичної інформації від функціональних модулів, яка відрізняється тим, що вона містить модуль оптичного зв'язку для забезпечення міжканальних зв'язків, модулі з'єднані між собою за допомогою індивідуальних цифрових ліній зв'язку стандарту LVDS, при цьому кожний модуль містить щонайменше один індивідуальний двонаправлений цифровий канал зв'язку, система містить інтерфейс зовнішніх зв'язків - індивідуальні оптичні лінії зв'язку, кожний модуль містить незалежний вузол діагностики, призначений для формування діагностичних повідомлень за ознакою працездатності з прив'язкою до єдиного часу системи, з'єднаний щонайменше з одним модулем діагностики. 2. Система логічного керування, яка містить з'єднані між собою модуль входів для прийому і перетворення вхідних сигналів, модуль виходів для формування сигналів керування, логічній модуль для реалізації алгоритмів користувача, яка відрізняється тим, що вона додатково включає другий логічній модуль, при цьому логічні модулі реалізують функції алгоритмів користувача, збору, аналізу і передачі діагностичної інформації від функціональних модулів, модуль оптичного зв'язку для забезпечення міжканальних зв'язків, модулі з'єднані між собою за допомогою індивідуальних цифрових ліній зв'язку стандарту LVDS, при цьому кожний модуль містить щонайменше один індивідуальний двонаправлений цифровий канал зв'язку, система містить інтерфейс зовнішніх зв'язків - індивідуальні оптичні лінії зв'язку, кожний модуль містить незалежний вузол діагностики, призначений для формування діагностичних повідомлень за ознакою працездатності з прив'язкою до єдиного часу системи, з'єднаний з кожним логічним модулем. 3. Система логічного керування за п. 1 або 2, яка відрізняється тим, що кожний із модулів реалізований з використанням ПЛІС. 4. Система логічного керування за п. 1 або 2, яка відрізняється тим, що вона містить декілька модулів входів, виходів, діагностики, оптичного зв'язку і логічних модулів. 5. Система логічного керування за п. 1 або 2, яка відрізняється тим, що вона реалізує функції, які виконують модулі в рамках одного або декількох каналів. 6. Система логічного керування за п. 1 або 2, яка відрізняється тим, що модуль входів містить множину дубльованих каналів прийому вхідних сигналів, вузол логічної обробки і перетворення, вузол діагностики, вузол формування сигналів візуальних сповіщень, вузол цифрових каналів зв'язку з логічним модулем і модулем діагностики, дубльований вузол електроживлення. 7. Система логічного керування за п. 1 або 2, яка відрізняється тим, що модуль виходів містить множину дубльованих каналів видачі сигналів керування, вузол логічного перетворення цифрової вихідної інформації, вузол діагностики, вузол формування сигналів візуальних сповіщень, вузол цифрових каналів зв'язку з логічним модулем і модулем діагностики, дубльований вузол електроживлення. 8. Система логічного керування за п. 1 або 2, яка відрізняється тим, що логічний модуль містить множину цифрових каналів для зв'язку з модулями входів і виходів, вузол діагностики, вузол формування сигналів візуальних сповіщень, вузол цифрових каналів зв'язку з модулем діагностики і логічним модулем, вузол цифрових каналів взаємної синхронізації роботи з іншими каналами СЛК при побудові дво-, три-, чотири канальних складних систем, вузол цифрових каналів для передачі сигналів в сервер архівування, вузол прийому сигналів і синхронізації єдиного часу, дискретні вхідні/вихідні вузли прямого прийому/видачі сигналів внутрішнього і зовнішнього керування, дубльований вузол електроживлення. 14 UA 99807 C2 5 10 15 20 25 30 35 40 45 50 55 60 9. Система логічного керування за п. 1, яка відрізняється тим, що модуль діагностики містить множину цифрових каналів для зв'язку з вхідними, вихідними і логічним модулями, вузол діагностики, вузол формування сигналів візуальних сповіщень, вузол цифрових каналів для передачі сигналів в сервер архівування, дискретні вхідні/вихідні вузли прямого прийому/видачі сигналів внутрішнього і зовнішнього керування, вхідні ланцюги і вузли приймання сигналів датчиків температури, задимлення і контролю доступу до СЛК, вузол прийому сигналів і синхронізації єдиного часу, дубльований вузол електроживлення. 10. Система логічного керування за п. 1 або 2, яка відрізняється тим, що модуль оптичного зв'язку містить канали зв'язку з кожним логічним модулем, вузол логічної обробки і розподілення потоків інформації, вузол діагностики, вузол цифрових каналів зв'язку з зовнішніми модулями оптичного зв'язку, встановленими в інших шасі і шафах при побудові складних багатоканальних систем, дубльований вузол електроживлення. 11. Система логічного керування за п. 1 або 2, яка відрізняється тим, що модулі встановлюються в шасі, крейт, субблок з використанням системи механічного кодування посадкових місць за допомогою спеціальних роз'ємних з'єднань, де однотипні рознімачі на стійці кодуються набором механічних штифтів для однозначного визначення місця встановлення відповідного модуля. 12. Система логічного керування за п. 1 або 2, яка відрізняється тим, що кожний логічний модуль і модуль діагностики при установленні в шасі отримують ІР-адреси за допомогою набору електрично-комутовуваних перемичок на крос-платі. 13. Система логічного керування за п. 1 або 2, яка відрізняється тим, що при побудові на базовому шасі система включає наступні комплектації: проста і дубльована. 14. Система логічного керування за одним із пп. 1, 2, 13, яка відрізняється тим, що система базується на спільній роботі модулів утворюючи: - локальне ядро, яке призначене для побудови одноканальних простих систем; - дубльоване локальне ядро, яке призначене для побудови одноканальних простих систем з резервуванням; - розділене ядро, яке призначене для побудови стійких до відмов багатоканальних систем; - дубльоване розділене ядро, яке призначене для побудови стійких до відмов багатоканальних систем з резервуванням; - гібридне ядро, яке призначене для побудови нескладних багатоканальних систем; - дубльоване гібридне ядро, яке призначене для побудови нескладних багатоканальних систем з резервуванням. 15. Система логічного керування за одним із пп. 1, 2, 13, 14, яка відрізняється тим, що в залежності від комплектації і кількості каналів система включає наступний відбір конфігурацій: - одноканальна, одноканальна дубльована; - двоканальна, двоканальна дубльована; - триканальна, триканальна дубльована; - чотириканальна, чотириканальна дубльована. 16. Система логічного керування за одним із пп. 1, 2, 13-15, яка відрізняється тим, що структура системи у всіх конфігураціях основана на вертикальній ієрархічній структурі "вхід логіка - вихід" з множиною паралельних індивідуальних цифрових ліній зв'язку між кожними зв'язаними рівнями для незалежної паралельної передачі інформації. 17. Система логічного керування за одним із пп. 1, 2, 13-16, яка відрізняється тим, що система використовує цифрові лінії зв'язку по електричних провідниках крос-плати в межах шасі і/або оптичні лінії зв’язку між модулями різних шасі. 18. Система логічного керування за одним із пп. 1, 2, 17, яка відрізняється тим, що цифрові лінії зв'язку містять щонайменше один індивідуальний двонаправлений повнодуплексний канал зв'язку для кожного модуля. 19. Система логічного керування за п. 1, яка відрізняється тим, що кожний модуль містить щонайменше один індивідуальний двонаправлений цифровий повнодуплексний канал зв'язку з модулем діагностики та щонайменше один індивідуальний двонаправлений цифровий повнодуплексний канал зв'язку з логічним модулем. 20. Система логічного керування за п. 2, яка відрізняється тим, що кожний модуль містить щонайменше один індивідуальний двонаправлений цифровий повнодуплексний канал зв'язку з основним логічним модулем та щонайменше один індивідуальний двонаправлений цифровий повнодуплексний канал зв'язку з резервним логічним модулем. 21. Система логічного керування за п. 1, яка відрізняється тим, що логічний модуль і модуль діагностики містять щонайменше один індивідуальний двонаправлений цифровий повнодуплексний канал зв'язку між собою. 15 UA 99807 C2 5 10 15 20 25 30 35 40 45 50 55 22. Система логічного керування за п. 2, яка відрізняється тим, що основний логічний модуль і резервний логічний модуль містять щонайменше один індивідуальний двонаправлений цифровий повнодуплексний канал зв'язку між собою. 23. Система логічного керування за п. 1 або 2, яка відрізняється тим, що зв'язок між модулями шасі реалізований за допомогою індивідуальних незалежних двонаправлених каналів типу "точка-точка", при цьому кожний модуль містить щонайменше одну незалежну гальванічно розв'язану від інших пару "приймач-передавач". 24. Система логічного керування за п. 1 або 2, яка відрізняється тим, що модулі з'єднуються з кожним логічним і діагностичним модулями системою друкованих провідників крос-плати, при цьому для передачі даних використовують послідовний протокол на базі UART зі стійким до відмов надлишковим кодування/декодуванням 8b/10b/8b і контролем вірогідності прийнятої і переданої інформації на основі циклічних контрольних сум (CRC). 25. Система логічного керування за п. 1 або 2, яка відрізняється тим, що фізичний рівень індивідуальних ліній зв'язку оснований на послідовному зв'язку по двійковому коду. 26. Система логічного керування за п. 1 або 2, яка відрізняється тим, що фізичний рівень лінії зв'язку оснований на диференціальному зв'язку згідно зі стандартом LVDS. 27. Система логічного керування за п. 1 або 2, яка відрізняється тим, що фізичний рівень мережі зв'язку шини оснований на топології "приймач-передавач" для кожної пари зв'язаних модулів, індивідуальні двонаправлені лінії зв'язку передають дані від одного модуля до іншого. 28. Система логічного керування за п. 1 або 2, яка відрізняється тим, що принцип побудови комп'ютерних мереж внутрішнього і зовнішнього інтерфейсу - стягнуті в точку магістралі на спеціальних серверах (технологічний, діагностичний). 29. Система логічного керування за п. 1 або 2, яка відрізняється тим, що фізична основа інтерфейсу між шасі і зовнішнім інтерфейсом - індивідуальні оптичні канали зв'язку типу "точкаточка", при цьому кожний оптичний канал "точка-точка""включає щонайменше один повнодуплексний канал зв’язку. 30. Система логічного керування за п. 1 або 2, яка відрізняється тим, що кожний логічний і діагностичний модулі незалежними оптичними каналами підключаються до двох комп'ютерних мереж, в яких два сервери незалежно один від одного здійснюють збір технологічної і діагностичної інформації та записують її в енергонезалежну пам'ять. 31. Система логічного керування за п. 1 або 2, яка відрізняється тим, що поканальні вхідні і вихідні ланцюги вводу/виводу гальванічно розділені один від одного і від корпусу модуля. 32. Система логічного керування за п. 1 або 2, яка відрізняється тим, що ланцюги діагностики і керування в кожному модулі гальванічно розділені, аж до окремого модуля діагностики шасі і окремої комп'ютерної діагностичної мережі в системі. 33. Система логічного керування за п. 1 або 2, яка відрізняється тим, що кожний із модулів для зберігання алгоритмів роботи містить енергонезалежну пам'ять. 34. Система логічного керування за п. 1 або 2, яка відрізняється тим, що система містить один, два одночасно або один з двох резервованих вводів електричного живлення. 35. Система логічного керування за п. 1 або 2, яка відрізняється тим, що СЛК включає модулі розширення, за допомогою яких система може бути реорганізована в складну вертикальну систему з вхідними електричними сигналами і вихідними цифровими сигналами для роботи в одно- та багатоканальній системі. 36. Система логічного керування за п. 1 або 2, яка відрізняється тим, що СЛК включає модулі розширення, за допомогою яких система може бути реорганізована в складну вертикальну систему з вхідними цифровими сигналами і вихідними електричними сигналами для роботи в одно- та багатоканальній системі. 37. Система логічного керування за п. 1 або 2, яка відрізняється тим, що СЛК включає модулі розширення, за допомогою яких система може бути реорганізована в надлишкову систему для застосування в критичних системах керування, керуючих системах безпеки, автоматизованих системах керування технологічними процесами на основі паралельної роботи двох та більше каналів. 38. Система логічного керування за п. 1 або 2, яка відрізняється тим, що СЛК включає модулі розширення, за допомогою яких система може бути реорганізована в надлишкову систему для застосування в критичних системах керування, керуючих системах безпеки, автоматизованих системах керування технологічними процесами, в яких вихідні сигнали формуються на основі мажоритарної логіки "1/2", "2/2", "2/3", "2/4", "3/4". 16 UA 99807 C2 17 UA 99807 C2 18 UA 99807 C2 19 UA 99807 C2 20 UA 99807 C2 21 UA 99807 C2 22 UA 99807 C2 23 UA 99807 C2 24 UA 99807 C2 25 UA 99807 C2 26 UA 99807 C2 27 UA 99807 C2 Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 28
ДивитисяДодаткова інформація
Назва патенту англійськоюLogical control system
Автори англійськоюBakhmach Yevhenii Stepanovych
Назва патенту російськоюСистема логического управления (варианты)
Автори російськоюБахмач Евгений Степанович
МПК / Мітки
МПК: G05B 19/418, G05B 19/048
Мітки: логічного, варіанти, керування, система
Код посилання
<a href="https://ua.patents.su/30-99807-sistema-logichnogo-keruvannya-varianti.html" target="_blank" rel="follow" title="База патентів України">Система логічного керування (варіанти)</a>
Спосіб (варіанти) та система для керування потоком між контролером базової станції і базовою приймально-передавальною станцією, пристрій керування обчислювальною машиною

Номер патенту: 80102
Опубліковано: 27.08.2007
Автори: Камат Санджай, Вудал Лейф, Конгелф Майкл А.
МПК: H04L 12/56, H04Q 7/30
Мітки: варіанти, базової, обчислювальною, потоком, керування, станції, контролером, спосіб, приймально-передавальною, станцією, базовою, машиною, пристрій, система
Формула / Реферат:
1. Спосіб керування потоком між контролером базової станції і базовою приймально-передавальною станцією, що містить етапи, на яких:прирощують значення лічильника індикації потоку, що відображає оновлене число пакетів даних, переданих з буфера;визначають розмір вікна буфера, коли оновлене число пакетів даних, переданих з буфера, виявиться рівним або більшим, ніж порогове число;визначають ідентифікаційний номер (ІН) пакета...
Спосіб керування потужністю в замкненій системі керування потужністю системи зв’язку з режимом паралельного доступу з кодовим розподілом каналів (пдкр) (варіанти) та замкнена система керування потужністю систем
Номер патенту: 57747
Опубліковано: 15.07.2003
Автор: Сеінтс Кіт В.
МПК: H04B 7/00
Мітки: розподілом, варіанти, кодовим, система, доступу, пдкр, паралельного, системі, потужністю, спосіб, замкнений, систем, замкнена, керування, режимом, зв'язку, каналів
Формула / Реферат:
1. Спосіб керування потужністю в замкненій системі керування потужністю системи зв'язку з режимом паралельного доступу з кодовим розподілом каналів (ПДКР), який полягає в:вимірюванні значення енергії у смузі частот,вимірюванні енергії пілот-каналу,перерахунку зазначеної енергії пілот-каналу відповідно до значення пілотної складової для одержання значення неперешкоджаючої енергії.відніманні зазначеного значення...
Система керування груповою поведінкою рухомих об’єктів
Номер патенту: 60351
Опубліковано: 10.06.2011
Автори: Савченко Віталій Анатолійович, Тищенко Максим Георгійович, Пермяков Олександр Юрійович, Машталір Вадим Віталійович, Кравченко Юрій Васильович
МПК: G01S 5/02
Мітки: система, поведінкою, об'єктів, рухомих, керування, груповою
Формула / Реферат:
Система керування груповою поведінкою рухомих об'єктів, яка містить комплект приладів прийому та обробки радіонавігаційних сигналів від супутникових радіонавігаційних систем, блок обробки координат та блок керування, при цьому система керування груповою поведінкою рухомих об'єктів розміщується на рухомих об'єктах, яка відрізняється тим, що зазначена система додатково містить пристрій для обміну інформацією з іншими рухомими об'єктами та блок...
Автоматизований спосіб керування лікуванням (варіанти) та система керування лікуванням захворювань (варіанти) шляхом здійснення способів оптимізації лікування і медичної діагностики за допомогою вибору варіанті
Номер патенту: 64743
Опубліковано: 15.03.2004
Автор: Айліфф Едвін С.
МПК: G06Q 50/00
Мітки: лікуванням, діагностики, автоматизований, здійснення, оптимізації, керування, спосіб, лікування, допомогою, медичної, варіанти, вибору, система, захворювань, способів, шляхом
Формула / Реферат:
1. Автоматизований спосіб керування лікуванням, що містить оцінювання здоров'я пацієнта, що має захворювання, і оптимізацію лікування захворювання на підставі оцінювання здоров'я пацієнта, причому спосіб додатково містить крок призначення часу повторного відвідування для пацієнта.2. Спосіб за п. 1, у якому час повторного відвідування є часом за регулярним розкладом.3. Спосіб за п. 1, у якому час повторного відвідування...
Система керування освітленням
Номер патенту: 18980
Опубліковано: 15.11.2006
Автори: Шевченко Ольга Вікторівна, Шевченко Сергій Анатолійович
МПК: F21S 10/00
Мітки: система, освітленням, керування
Формула / Реферат:
Система керування освітленням, що містить модуль мікропроцесора, модуль пам'яті, модуль синхронізації, освітлювальні пристрої, обчислювальну машину, яка відрізняється тим, що додатково введено мікропроцесорний пристрій, який містить модуль мікропроцесора, модуль пам'яті, модуль синхронізації, звуковий модуль, модуль живлення, модуль підключення допоміжного пристрою керування системою, програмний модуль, модулі сполучення з шинами...
Попередній патент: Спосіб високотемпературного виділення лігніну
Наступний патент: Лижний тренажер
Випадковий патент: Спосіб позапічної обробки чавуну порошковим дротом