Спосіб інтраваскулярного ультразвукового відтворення зображень (варіанти)



Формула / Реферат
1. Спосіб інтраваскулярного ультразвукового відтворення зображень, що включає такі етапи: розміщення передавача і детектора ультразвукових сигналів всередині фізичного просвіту, виявлення ультразвукових сигналів, отримання першого зображення з першого набору виявлених ультразвукових сигналів, обробка і оцифровування першого набору виявлених ультразвукових сигналів, отримання першого двовимірного масиву з оцифрованого першого набору виявлених ультразвукових сигналів, де перший двовимірний масив включає першу множину елементів, при цьому перше зображення компонується як перший двовимірний масив, отримання другого зображення з другого набору виявлених ультразвукових сигналів, обробка і оцифровування другого набору виявлених ультразвукових сигналів, отримання другого двовимірного масиву з оцифрованого другого набору виявлених ультразвукових сигналів, при цьому друге зображення компонується як другий двовимірний масив, де другий двовимірний масив включає другу множину елементів, при цьому і перша множина елементів, і друга множина елементів являють собою виявлений ультразвуковий сигнал із заздалегідь встановленої просторової ділянки, який відрізняється тим, що додатково включає етап виконання оцінки зсуву другого зображення відносно першого зображення для виявлення переміщення.
2. Спосіб за п. 1, який відрізняється тим, що і перший двовимірний масив, і другий двовимірний масив компонуються в полярних координатах, і оцінку зсуву виконують в полярних координатах щонайменше в одному вимірюванні.
3. Спосіб за п. 1, який відрізняється тим, що етап оцінки зсуву включає щонайменше одну операцію подібності.
4. Спосіб за п. 3, який відрізняється тим, що щонайменше одна операція подібності включає щонайменше один з методів аналізу - взаємну кореляцію, нормалізовану взаємну кореляцію або CAP (сума абсолютних різниць).
5. Спосіб за п. 4, який відрізняється тим, що взаємна кореляція включає щонайменше один з методів аналізу - позитивну взаємну кореляцію або перетворення Фур’є.
6. Спосіб за п. 1, який відрізняється тим, що і перший двовимірний масив, і другий двовимірний масив компонуються в декартових координатах, і оцінку зсуву виконують в декартових координатах щонайменше в одному вимірюванні.
7. Спосіб за п. 2, який відрізняється тим, що виявлене переміщення відповідає щонайменше одному з видів переміщення - обертальному руху або вазомоторній реакції.
8. Спосіб за п. 7, який відрізняється тим, що обертальний рух відповідає щонайменше одному з обертальних рухів - глобальному обертальному руху, жорсткому обертальному руху або локальному обертальному руху, і вазомоторна реакція відповідає щонайменше одній з вазомоторних реакцій - глобальній вазомоторній реакції або локальній вазомоторній реакції.
9. Спосіб за п. 6, який відрізняється тим, що виявлене переміщення відповідає декартовому зміщенню.
10. Спосіб за п. 9, який відрізняється тим, що декартове зміщення відповідає щонайменше одному із зміщень - жорсткому декартовому зміщенню або локальному декартовому зміщенню.
11. Спосіб інтраваскулярного ультразвукового відтворення зображень, що включає такі етапи: розміщення передавача і детектора ультразвукових сигналів всередині фізичного просвіту, виявлення множини ультразвукових сигналів, отримання послідовних наборів ультразвукових сигналів з множини ультразвукових сигналів, отримання множини послідовних зображень з послідовних наборів ультразвукових сигналів, який відрізняється тим, що додатково включає етап контролю змін у відповідних величинах пікселів, що належать послідовним зображенням в множині зображень.
12. Спосіб за п. 11, який відрізняється тим, що додатково включає етап поліпшення зображення шляхом фільтрації змін у відповідних величинах пікселів.
13. Спосіб за п. 11, який відрізняється тим, що додатково включає етапи контролю змін в текстурі відповідних величин пікселів і виконання автоматичної сегментації зображення, включаючи ідентифікацію просвіту.
14. Спосіб інтраваскулярного ультразвукового відтворення зображень, що включає такі етапи: розміщення передавача і детектора ультразвукових сигналів всередині фізичного просвіту, виявлення множини ультразвукових сигналів, отримання послідовних наборів ультразвукових сигналів з множини ультразвукових сигналів, отримання множини послідовних зображень з послідовних наборів ультразвукових сигналів, який відрізняється тим, що додатково включає етапи оцінки кожної пари послідовних зображень і отримання функції подібності, причому для кожної пари послідовних зображень етап оцінки включає етап виконання операції подібності між першим зображенням з пари зображень і другим зображенням з пари зображень, і кожне значення функції подібності є результатом виконаної операції подібності.
15. Спосіб за п. 14, який відрізняється тим, що операція подібності відповідає щонайменше одному з методів аналізу - взаємній кореляції, нормалізованій взаємній кореляції або CAP.
16. Спосіб інтраваскулярного ультразвукового відтворення зображень, що включає такі етапи: розміщення передавача і детектора ультразвукових сигналів всередині фізичного просвіту, виявлення множини ультразвукових сигналів, отримання послідовних наборів ультразвукових сигналів з множини ультразвукових сигналів, отримання множини послідовних зображень з послідовних наборів ультразвукових сигналів, який відрізняється тим, що додатково включає етап виконання оцінки зсуву для кожного зображення відносно попереднього зображення для контролю в кожному з послідовних зображень вазомоторної реакції фізичного просвіту.
17. Спосіб за п. 16, який відрізняється тим, що вазомоторна реакція відповідає щонайменше одній з вазомоторних реакцій - локальній вазомоторній реакції або глобальній вазомоторній реакції.
18. Спосіб за п. 14, який відрізняється тим, що функцію подібності контролюють для кардіоваскулярної періодичності.
19. Спосіб за п. 18, який відрізняється тим, що контроль функції подібності включає щонайменше один з методів аналізу - перетин порога, внутрішню функцію подібності, перетворення Фур‘є або спектральний аналіз.
20. Спосіб за п. 14, який відрізняється тим, що функцію подібності аналізують на якість щонайменше одного зображення з множини послідовних зображень, що використовуються для формування функції подібності.
21. Спосіб за п. 14, який відрізняється тим, що для кожної пари послідовних зображень етап оцінки додатково включає етап виконання оцінки зсуву між першим зображенням з пари зображень і другим зображенням з пари зображень.
22. Спосіб за п. 7, який відрізняється тим, що додатково включає етап стабілізації другого зображення відносно першого зображення для щонайменше одного з переміщень - обертального руху або вазомоторної реакції, де етап стабілізації виконують в полярних координатах.
23. Спосіб за п. 9, який відрізняється тим, що додатково включає етап стабілізації другого зображення відносно першого зображення для декартового зміщення, де етап стабілізації виконують в декартових координатах.
24. Спосіб за п. 23, який відрізняється тим, що додатково включає етап виведення на дисплей першого зображення і стабілізованого другого зображення.
25. Спосіб за п. 22, який відрізняється тим, що етап стабілізації стабілізує щонайменше одне з переміщень - глобальне обертання, жорстке обертання, локальне обертання, локальну вазомоторну реакцію або глобальну вазомоторну реакцію.
26. Спосіб за п. 25, який відрізняється тим, що етап стабілізації щонайменше одного з переміщень - глобального обертання, жорсткого обертання або глобальної вазомоторної реакції - включає етап зсуву другого зображення в полярних координатах щонайменше в одному вимірюванні відповідно до величини і напряму, отриманих внаслідок оцінки зсуву.
27. Спосіб за п. 26, який відрізняється тим, що додатково включає етап обмеження зносу, виникаючого через стабілізацію другого зображення відносно першого зображення.
28. Спосіб за п. 27, який відрізняється тим, що етап обмеження зносу включає етап зсуву другого зображення на величину, регульовану шляхом використання інформації, отриманої внаслідок контролю кардіоваскулярної періодичності.
29. Спосіб інтраваскулярного ультразвукового відтворення зображень, що включає такі етапи: розміщення передавача і детектора ультразвукових сигналів всередині фізичного просвіту, виявлення множини ультразвукових сигналів, отримання множини послідовних зображень з множини виявлених ультразвукових сигналів, який відрізняється тим, що додатково включає етапи виконання оцінки зсуву для кожного зображення відносно попереднього зображення, контролю змін у відповідних величинах пікселів, що належать послідовним зображенням в множині зображень, контролю кардіоваскулярної періодичності і стабілізації кожного зображення з множини зображень відносно попереднього зображення.
30. Спосіб інтраваскулярного ультразвукового відтворення зображень, що включає такі етапи: розміщення передавача і детектора ультразвукових сигналів всередині фізичної судини, переміщення передавача і детектора ультразвукових сигналів по ділянці фізичної судини, виявлення ультразвукових сигналів, отримання першого зображення з ультразвукових сигналів, виявлених під час першого переміщення передавача і детектора ультразвукових сигналів по судині, отримання другого зображення з ультразвукових сигналів, виявлених під час другого переміщення передавача і детектора ультразвукових сигналів по судині, який відрізняється тим, що додатково включає етапи виконання оцінки зсуву і стабілізації другого зображення відносно першого зображення, і виведення на дисплей стабілізованого другого зображення.
31. Спосіб інтраваскулярного ультразвукового відтворення зображень, що включає такі етапи: розміщення передавача і детектора ультразвукових сигналів всередині фізичної судини, переміщення передавача і детектора ультразвукових сигналів по ділянці фізичної судини, виявлення ультразвукових сигналів, отримання першого зображення з ультразвукових сигналів, виявлених в першій частині судини, отримання другого зображення з ультразвукових сигналів, виявлених у другій частині судини, який відрізняється тим, що додатково включає етапи виконання оцінки зсуву і стабілізації другого зображення відносно першого зображення, і виведення на дисплей стабілізованого другого зображення.
32. Спосіб інтраваскулярного ультразвукового відтворення зображень, що включає такі етапи: розміщення передавача і детектора ультразвукових сигналів всередині фізичної судини, виконання першого переміщення передавача і детектора ультразвукових сигналів вздовж першої частини судини, виявлення першого набору ультразвукових сигналів, отримання першого ряду послідовних зображень з першого набору виявлених ультразвукових сигналів, отримання першого зображення з ультразвукових сигналів, виявлених в першій частині судини, виконання другого переміщення передавача і детектора ультразвукових сигналів вздовж другої частини судини, виявлення другого набору ультразвукових сигналів, отримання другого ряду послідовних зображень з другого набору виявлених ультразвукових сигналів, який відрізняється тим, що додатково включає етапи вибору з другого ряду послідовних зображень підгрупи послідовних зображень, сформованихяк еталонний сегмент, виконання операції подібності між кожним зображенням з еталонного сегмента і кожним зображенням з множини підгруп зображень, отриманих з першого ряду послідовних зображень, і поєднання кожного зображення з еталонного сегмента з кожним зображенням з іншої підгрупи множини підгруп, де інша підгрупа являє собою підібраний сегмент.
33. Спосіб за п. 32, який відрізняється тим, що кожне зображення еталонного сегмента з'єднують за допомогою етапу поєднання з еквівалентним зображенням з підібраного сегмента, і кожне зображення еталонного сегмента охоплює по суті ту ж задану ділянку судини, що і еквівалентне зображення, що поєднується з ним.
34. Спосіб за п. 32, який відрізняється тим, що етап поєднання включає етап виконання відносного зсуву еталонного сегмента щонайменше на одне зображення відносно першого ряду послідовних зображень, де кожний зсув забезпечує виконання операцій подібності між зображеннями нової підгрупи з множини підгруп, отриманих з першого ряду послідовних зображень, і між зображеннями еталонного сегмента.
35. Спосіб за п. 34, який відрізняється тим, що етап поєднання додатково включає етап стабілізації кожного зображення еталонного сегмента відносно кожного еквівалентного зображення нової підгрупи.
36. Спосіб за п. 33, який відрізняється тим, що додатково включає етап стабілізації кожного зображення еталонного сегмента відносно кожного еквівалентного зображення підібраного сегмента.
37. Спосіб за п. 32, який відрізняється тим, що додатково включає етап стабілізації кожного зображення другого ряду послідовних зображень відносно кожного еквівалентного зображення першого ряду послідовних зображень.
38. Спосіб за п. 32, який відрізняється тим, що операція подібності включає один з методів аналізу - взаємну кореляцію або нормалізовану взаємну кореляцію.
39. Спосіб за п. 32, який відрізняється тим, що перша ділянка і друга ділянка фізичного просвіту приблизно однакові по довжині.
40. Спосіб за п. 1, який відрізняється тим, що передавач і детектор ультразвукових сигналів з'єднані із зондом.
41. Спосіб за п. 40, який відрізняється тим, що зонд являє собою щонайменше один з пристроїв - катетер і спрямовуючий провід.
42. Спосіб за п. 1, який відрізняється тим, що передавач і детектор ультразвукових сигналів включають незалежний передавач і незалежний детектор.
43. Спосіб за п. 14, який відрізняється тим, що передавач і детектор ультразвукових сигналів включають незалежний передавач і незалежний детектор.
44. Спосіб за п. 30, який відрізняється тим, що передавач і детектор ультразвукових сигналів з'єднані із зондом, де зонд переміщує передавач і детектор ультразвукових сигналів.
45. Спосіб за п. 44, який відрізняється тим, що зонд являє собою щонайменше один з пристроїв - катетер і спрямовуючий провід.
46. Спосіб за п. 30, який відрізняється тим, що передавач і детектор ультразвукових сигналів включають незалежний передавач і незалежний детектор.
47. Спосіб за п. 31, який відрізняється тим, що передавач і детектор ультразвукових сигналів з'єднані із зондом, де зонд переміщує передавач і детектор ультразвукових сигналів.
48. Спосіб за п. 47, який відрізняється тим, що зонд являє собою щонайменше один з пристроїв - катетер і спрямовуючий провід.
49. Спосіб за п. 31, який відрізняється тим, що передавач і детектор ультразвукових сигналів включають незалежний передавач і незалежний детектор.
50. Спосіб за п. 32, який відрізняється тим, що передавач і детектор ультразвукових сигналів з'єднані із зондом, де зонд переміщує передавач і детектор ультразвукових сигналів.
51. Спосіб за п. 50, який відрізняється тим, що зонд являє собою щонайменше один з пристроїв - катетер і спрямовуючий провід.
52. Спосіб за п. 32, який відрізняється тим, що передавач і детектор ультразвукових сигналів включають незалежний передавач і незалежний детектор.
53. Спосіб за п. 23, який відрізняється тим, що декартове зміщення включає одне із зміщень - глобальне декартове зміщення, локальне декартове зміщення або жорстке декартове зміщення, і етап стабілізації включає етап стабілізації щонайменше одного із зміщень - глобального декартового зміщення, локального декартового зміщення або жорсткого декартового зміщення.
54. Спосіб за п. 53, який відрізняється тим, що етап стабілізації щонайменше одного із зміщень - глобального декартового зміщення і жорсткого декартового зміщення - виконують шляхом зсуву другого зображення в декартових координатах щонайменше в одному вимірюванні відповідно до величини і напряму, отриманих внаслідок оцінки зсуву.
55. Спосіб за п. 54, який відрізняється тим, що додатково включає етап обмеження зносу, виникаючого через стабілізацію другого зображення відносно першого зображення.
56. Спосіб за п. 55, який відрізняється тим, що етап обмеження зносу включає етап зсуву другого зображення на величину, регульовану шляхом використання інформації, отриманої внаслідок контролю кардіоваскулярної періодичності.
57. Спосіб виконання операції відтворення зображень при інтраваскулярному ультразвуковому дослідженні, що включає такі етапи: розміщення всередині фізичного просвіту передавача ультразвукових сигналів і детектора ультразвукових сигналів, виявлення множини ультразвукових сигналів, відображених щонайменше від частини фізичного просвіту, обробка і оцифровування першого набору ультразвукових сигналів, які отримані з множини відображених ультразвукових сигналів, для створення щонайменше першого набору оцифрованих зразків і другого набору оцифрованих зразків, отримання з першого набору оцифрованих зразків першого двовимірного масиву, що включає набір даних, де: перший двовимірний масив включає першу множину елементів, при цьому кожний з першої множини елементів являє собою оцифрований зразок, відповідний одному з множини відображених ультразвукових сигналів із заздалегідь встановленої просторової ділянки фізичного просвіту, а набір даних першого двовимірного масиву представляє повний поперечний переріз фізичного просвіту, перший двовимірний масив компонується в полярних координатах, перша вісь першого двовимірного масиву представляє координату r, і друга вісь першого двовимірного масиву представляє кутову координату, а також етап отримання з другого набору оцифрованих зразків другого двовимірного масиву, що включає набір даних, де: другий двовимірний масив включає другу множину елементів, при цьому кожний з другої множини елементів являє собою оцифрований зразок, відповідний одному з множини відображених ультразвукових сигналів із заздалегідь встановленої просторової ділянки, набір даних другого двовимірного масиву представляє повний поперечний переріз фізичного просвіту, другий двовимірний масив компонується в полярних координатах, перша вісь другого двовимірного масиву представляє координату r, і друга вісь другого двовимірного масиву представляє кутову координату, який відрізняється тим, що включає додаткові етапи, а саме: виконання оцінки зсуву і операції виявлення другого двовимірного масиву відносно першого двовимірного масиву для виявлення величини і напряму щонайменше одного з переміщень - глобальної вазомоторної реакції або жорсткого обертання, - представлених набором даних, відповідних другому двовимірному масиву, відносно набору даних, відповідних першому двовимірному масиву, і стабілізацію другого двовимірного масиву шляхом застосування зсуву, що має вибрану величину і вибраний напрям, до другого двовимірного масиву для рівномірного зсуву вздовж щонайменше однієї з першої і другої осей другого двовимірного масиву кожного з другої множини елементів відповідно до вибраної величини і вибраного напряму, при цьому етап стабілізації забезпечує компенсацію щонайменше одного з переміщень - жорсткого обертання або глобальної вазомоторної реакції, - де вибрана величина і вибраний напрям зсуву отримані внаслідок оцінки зсуву і операції виявлення.
58. Спосіб за п. 57, який відрізняється тим, що етап виконання оцінки зсуву і операції виявлення включає етап створення першого складного двовимірного масиву, що має першу множину складних елементів, шляхом застосування двовимірного перетворення Фур’є до першого двовимірного масиву, етап створення другого складного двовимірного масиву, що має другу множину складних елементів, шляхом застосування двовимірного перетворення Фур‘є до другого двовимірного масиву, етап отримання результату сполучення другої множини елементів, етап множення кожного з першої множини складних елементів на відповідний результат сполучення другої множини складних елементів, етап представлення результату кожного множення в третьому двовимірному масиві, де кожний складний елемент даних в третьому складному двовимірному масиві є результатом множення елемента першого складного двовимірного масиву на відповідний зв'язаний елемент другого складного двовимірного масиву, етап виконання інверсного двовимірного перетворення Фур’є для третього складного двовимірного масиву, етап отримання дійсного компонента з кожного елемента перетвореного третього складного двовимірного масиву, етап представлення кожного отриманого дійсного компонента в четвертому двовимірному масиві і етап визначення місцезнаходження глобального максимуму четвертого двовимірного масиву, при цьому величина і напрям щонайменше одного з переміщень - жорсткого обертання або глобальної вазомоторної реакції - визначаються місцезнаходженням глобального максимуму вздовж щонайменше однієї з першої і другої осей четвертого двовимірного масиву.
59. Спосіб за п. 57, який відрізняється тим, що виконання оцінки зсуву і операції виявлення включає етап рівномірного зсуву кожного елемента другого двовимірного масиву вздовж першої осі другого двовимірного масиву на першу задану величину в першому заданому напрямі, етап рівномірного зсуву кожного елемента другого двовимірного масиву вздовж другої осі другого двовимірного масиву на другу задану величину у другому заданому напрямі, етап виконання операції подібності між відповідними елементами зсунутого другого двовимірного масиву і першого двовимірного масиву, етап представлення величини, отриманої внаслідок операції подібності, у вигляді елемента третього двовимірного масиву, і етап повторення вищезгаданих етапів, де кожний повтор виконують шляхом зсуву кожного елемента другого двовимірного масиву вздовж першої осі на нову першу величину в новому першому напрямі і вздовж другої осі на нову другу величину в новому другому напрямі, поки не буде встановлене місцезнаходження глобального екстремуму всіх можливих значень третього двовимірного масиву, де величина і напрям щонайменше одного з переміщень - жорсткого обертання або глобальної вазомоторної реакції - визначаються місцезнаходженням глобального екстремуму вздовж щонайменше однієї з першої або другої осей третього двовимірного масиву.
60. Спосіб за п. 7, який відрізняється тим, що додатково включає зменшення кількості повторів рівномірного зсуву кожного елемента другого двовимірного масиву вздовж першої осі другого двовимірного масиву на першу задану величину в першому заданому напрямі, повторів рівномірного зсуву кожного елемента другого двовимірного масиву вздовж другої осі другого двовимірного масиву на другу задану величину у другому заданому напрямі, повторів виконання операції подібності між відповідними елементами зсунутого другого двовимірного масиву і першого двовимірного масиву, повторів представлення величини, отриманої внаслідок операції подібності, у вигляді елемента третього двовимірного масиву, причому зменшення кількості повторів досягається шляхом здійснення щонайменше одного з етапів виконання операції отримання вибірок з першого двовимірного масиву і другого двовимірного масиву перед рівномірним зсувом кожного елемента другого двовимірного масиву вздовж першої осі другого двовимірного масиву на першу задану величину в першому заданому напрямі, і з етапу ініціювання пошуку глобального екстремуму третього двовимірного масиву при кожній початковій величині зсуву вздовж першої осі і вздовж другої осі другого двовимірного масиву рівного нулю, де знайдений локальний екстремум третього двовимірного масиву відповідає глобальному екстремуму третього двовимірного масиву.
61. Спосіб виконання операції відтворення зображень при інтраваскулярному ультразвуковому дослідженні, що включає такі етапи: розміщення всередині фізичного просвіту передавача ультразвукових сигналів і детектора ультразвукових сигналів, виявлення множини ультразвукових сигналів, відображених щонайменше від частини фізичного просвіту, обробка і оцифровування першого набору ультразвукових сигналів, отримані з множини відображених ультразвукових сигналів, для створення щонайменше першого набору оцифрованих зразків і другого набору оцифрованих зразків, отримання з першого набору оцифрованих зразків першого двовимірного масиву, що включає набір даних, де: перший двовимірний масив включає першу множину елементів, при цьому кожний з першої множини елементів являє собою оцифрований зразок, відповідний одному з множини відображених ультразвукових сигналів із заздалегідь встановленої просторової ділянки фізичного просвіту, а набір даних першого двовимірного масиву представляє повний поперечний переріз фізичного просвіту, перший двовимірний масив компонується в декартових координатах, перша вісь першого двовимірного масиву представляє координату X, і друга вісь першого двовимірного масиву представляє координату Y, а також етап отримання з другого набору оцифрованих зразків другого двовимірного масиву, що включає набір даних, де: другий двовимірний масив включає другу множину елементів, при цьому кожний з другої множини елементів являє собою оцифрований зразок, відповідний одному з множини відображених ультразвукових сигналів із заздалегідь встановленої просторової ділянки, набір даних другого двовимірного масиву представляє повний поперечний переріз фізичного просвіту, другий двовимірний масив компонується в декартових координатах, перша вісь другого двовимірного масиву представляє координату X, а друга вісь другого двовимірного масиву представляє координату Y, який відрізняється тим, що включає додаткові етапи, а саме: виконання оцінки зсуву і операції виявлення другого двовимірного масиву відносно першого двовимірного масиву для виявлення величини і напряму жорсткого декартового зміщення вздовж щонайменше однієї з координат Х і Y, представлених набором даних, відповідних другому двовимірному масиву, відносно набору даних, відповідних першому двовимірному масиву, і стабілізацію другого двовимірного масиву шляхом застосування зсуву, що має вибрану величину і вибраний напрям, до другого двовимірного масиву для рівномірного зсуву вздовж щонайменше однієї з першої і другої осей другого двовимірного масиву кожного з другої множини елементів відповідно до вибраної величини і вибраного напряму, при цьому етап стабілізації забезпечує компенсацію жорсткого декартового зміщення, де вибрана величина і вибраний напрям отримані внаслідок оцінки зсуву і операції виявлення.
62. Спосіб за п. 61, який відрізняється тим, що додатково включає етап виведення на дисплей зображення, відповідного першому двовимірному масиву і зображення, відповідного стабілізованому другому двовимірному масиву.
63. Спосіб за п. 61, який відрізняється тим, що виконання оцінки зсуву і операції виявлення включає етап створення першого складного двовимірного масиву, що має першу множину складних елементів, шляхом застосування двовимірного перетворення Фур’є до першого двовимірного масиву, етап створення другого складного двовимірного масиву, що має другу множину складних елементів, шляхом застосування двовимірного перетворення Фур’є до другого двовимірного масиву, етап отримання результату сполучення другої множини елементів, етап множення кожного з першої множини складних елементів на відповідний результат сполучення другої множини складних елементів, етап представлення результату кожного множення в третьому двовимірному масиві, де кожний складний елемент даних в третьому складному двовимірному масиві є результатом множення елемента першого складного двовимірного масиву на відповідний зв'язаний елемент другого складного двовимірного масиву, етап виконання інверсного двовимірного перетворення Фур’є для третього складного двовимірного масиву, етап отримання дійсного компонента з кожного елемента перетвореного третього складного двовимірного масиву, етап представлення кожного отриманого дійсного компонента в четвертому двовимірному масиві і етап визначення місцезнаходження глобального максимуму четвертого двовимірного масиву, при цьому величина і напрям жорсткого декартового зміщення вздовж щонайменше однієї з осей Х і Y визначаються місцезнаходженням глобального максимуму вздовж щонайменше однієї з першої або другої осей четвертого двовимірного масиву.
64. Спосіб за п. 61, який відрізняється тим, що виконання оцінки зсуву і операції виявлення включає етап рівномірного зсуву кожного елемента другого двовимірного масиву вздовж першої осі другого двовимірного масиву на першу задану величину в першому заданому напрямі, етап рівномірного зсуву кожного елемента другого двовимірного масиву вздовж другої осі другого двовимірного масиву на другу задану величину у другому заданому напрямі, етап виконання операції подібності між відповідними елементами зсунутого другого двовимірного масиву і першого двовимірного масиву, етап представлення величини, отриманої внаслідок операції подібності, у вигляді елемента третього двовимірного масиву і етап повторення вищезгаданих етапів, де кожний повтор виконують шляхом зсуву кожного елемента другого двовимірного масиву вздовж першої осі на нову першу величину в новому першому напрямі і вздовж другої осі на нову другу величину в новому другому напрямі, поки не буде встановлене місцезнаходження глобального екстремуму всіх можливих значень третього двовимірного масиву, де величина і напрям жорсткого декартового зміщення вздовж щонайменше однієї з осей Х і Y визначаються місцезнаходженням глобального екстремуму вздовж щонайменше однієї з першої або другої осей третього двовимірного масиву.
65. Спосіб за п. 64, який відрізняється тим, що додатково включає зменшення кількості повторів рівномірного зсуву кожного елемента другого двовимірного масиву вздовж першої осі другого двовимірного масиву на першу задану величину в першому заданому напрямі, повторів рівномірного зсуву кожного елемента другого двовимірного масиву вздовж другої осі другого двовимірного масиву на другу задану величину у другому заданому напрямі, повторів виконання операції подібності між відповідними елементами зсунутого другого двовимірного масиву і першого двовимірного масиву, повторів представлення величини, отриманої внаслідок операції подібності, у вигляді елемента третього двовимірного масиву, причому зменшення кількості повторів досягається шляхом здійснення щонайменше одного з етапів виконання операції отримання вибірок з першого двовимірного масиву і другого двовимірного масиву перед рівномірним зсувом кожного елемента другого двовимірного масиву вздовж першої осі другого двовимірного масиву на першу задану величину в першому заданому напрямі, і з етапу ініціювання пошуку глобального екстремуму третього двовимірного масиву за умови, що кожна початкова величина зсуву вздовж першої осі і вздовж другої осі другого двовимірного масиву рівна нулю, де знайдений локальний екстремум третього двовимірного масиву відповідає глобальному екстремуму третього двовимірного масиву.
66. Спосіб за п. 57, який відрізняється тим, що додатково включає етап перетворення першого двовимірного масиву в третій двовимірний масив, що включає набір даних і компонується в декартових координатах, де перша вісь третього двовимірного масиву відповідає координаті X, і друга вісь третього двовимірного масиву відповідає координаті Y, а також етап перетворення стабілізованого другого двовимірного масиву в четвертий двовимірний масив, що включає набір даних і компонується в декартових координатах, де четвертий двовимірний масив включає множину елементів, перша вісь четвертого двовимірного масиву відповідає координаті X, а друга вісь четвертого двовимірного масиву відповідає координаті Y, етап виконання оцінки зсуву і операції виявлення четвертого двовимірного масиву відносно третього двовимірного масиву для виявлення величини і напряму жорсткого декартового зміщення вздовж щонайменше однієї з координат Х і Y, представлених набором даних, відповідних четвертому двовимірному масиву, відносно набору даних, відповідних третьому двовимірному масиву, етап стабілізації четвертого двовимірного масиву шляхом застосування зсуву, що має вибрану величину і вибраний напрям, до четвертого двовимірного масиву для рівномірного зсуву вздовж щонайменше однієї з першої і другої осей четвертого двовимірного масиву кожного з множини елементів четвертого двовимірного масиву відповідно до вибраної величини і вибраного напряму, при цьому етап стабілізації забезпечує компенсацію жорсткого декартового зміщення, де вибрана величина і вибраний напрям отримані внаслідок оцінки зсуву і операції виявлення для четвертого двовимірного масиву відносно третього двовимірного масиву.
67. Спосіб за п. 57, який відрізняється тим, що додатково включає етап виведення на дисплей зображення, відповідного третьому двовимірному масиву і зображення, відповідного стабілізованому четвертому двовимірному масиву.
68. Спосіб отримання і обробки функції подібності для контролю кардіоваскулярної періодичності з операції відтворення зображень при інтраваскулярному ультразвуковому дослідженні, що включає такі етапи: розміщення всередині фізичного просвіту передавача ультразвукових сигналів і детектора ультразвукових сигналів, виявлення множини ультразвукових сигналів, відображених щонайменше від частини фізичного просвіту, обробка і оцифровування першого набору ультразвукових сигналів, отриманих з множини відображених ультразвукових сигналів, для отримання щонайменше першої множини послідовних кадрів, де кожний кадр включає набір даних, причому: кожний кадр включає множину елементів, і кожний з множини елементів представляє оцифрований зразок, відповідний одному з множини відображених ультразвукових сигналів із заздалегідь встановленої просторової ділянки фізичного просвіту, а набір даних відповідає кожному з множини кадрів, також представлений повний поперечний переріз фізичного просвіту, і кожний з множини кадрів компонується щонайменше в одній з систем координат - в декартових координатах або полярних координатах, а також етап отримання одновимірної функції, сформованої у вигляді функції подібності, при цьому величина функції подібності відповідає f(n), де n - додатнє ціле число, і визначається операцією подібності, виконаною між елементами, що містяться в n-ому кадрі, і між елементами, що містяться в n+1-ому кадрі, і обробка одновимірної функції для отримання величини періодичності функції подібності.
69. Спосіб за п. 68, який відрізняється тим, що фізичним просвітом є кровоносна судина, і величина періодичності функції подібності відповідає величині кардіоваскулярної періодичності.
70. Спосіб за п. 69, який відрізняється тим, що величина кардіоваскулярної періодичності забезпечує можливість виконання операції кардіоселекції по відношенню до кардіоваскулярного цикла.
71. Спосіб за п. 68, який відрізняється тим, що зображення, яке виводиться на дисплей, відповідає одному кадру з першої множини кадрів, що використовується для формування функції подібності, і відсутність періодичності функції подібності означає існування артефакту в зображенні для дисплея.
72. Спосіб за п. 71, який відрізняється тим, що артефакт викликаний всередині фізичного просвіту нерівномірністю обертання щонайменше одного з пристроїв - передавача ультразвукових сигналів або детектора ультразвукових сигналів.
73. Спосіб автоматичного сегментування зображення при інтраваскулярному ультразвуковому дослідженні, що включає такі етапи: розміщення всередині фізичного просвіту передавача ультразвукових сигналів і детектора ультразвукових сигналів, виявлення множини ультразвукових сигналів, відображених щонайменше від частини фізичного просвіту, обробка і оцифровування першого набору ультразвукових сигналів, які отримані з множини відображених ультразвукових сигналів, для отримання множини наборів оцифрованих зразків, отримання множини послідовних кадрів з множини наборів оцифрованих зразків, де кожний кадр включає множину пікселів, і кожний піксель представляє один з множини оцифрованих зразків, відповідний одному з множини відображених ультразвукових сигналів із заздалегідь встановленої просторової ділянки фізичного просвіту, при цьому кожний кадр представляє повний поперечний переріз фізичного просвіту, і кожний кадр компонується щонайменше в одній з систем координат - полярних координатах або декартових координатах, а також етап привласнення однієї з множини текстурних категорій кожному пікселю, включеному в кожний кадр, на основі взаємовідносин кожного пікселя з суміжним пікселем, де кожна привласнена текстурна категорія отримана з відповідного пікселя, що є одним з великих, меншого або рівного по величині кожному найближчому суміжному пікселю, виявлення зміни в привласненій текстурній категорії кожного пікселя шляхом контролю текстурної категорії, привласненої кожному пікселю, включеному в кожний з множини кадрів, і створення двійкового кадру шляхом виконання розподілу кожного пікселя, відповідного одному з кадрів, вибраному з множини кадрів, в перший клас або у другий клас, і привласнення двійкової величини кожному пікселю, відповідному вибраному кадру, де перший клас означає відсутність зміни в текстурній категорії, привласненій відповідному пікселю, і де другий клас означає присутність зміни в текстурній категорії, привласненій відповідному пікселю.
74. Спосіб за п. 73, який відрізняється тим, що фізичним просвітом є кровоносна судина, і кожний піксель, відповідний кожному кадру, представляє або кровотік через кровоносну судину, або тканину кровоносної судини, або зовнішню тканину, навколишню кровоносній судині, при цьому кожний піксель, відповідний першому класу, представляє тканину судини, а кожний піксель, відповідний другому класу, представляє кровотік або зовнішню тканину, і двійковий кадр піддають подальшій обробці для вибирання тієї області пікселів, яка пов'язана з кровотоком через кровоносну судину у вибраному кадрі.
75. Спосіб поліпшення якості операції відтворення зображень при інтраваскулярному ультразвуковому дослідженні, що включає такі етапи: розміщення всередині фізичного просвіту передавача ультразвукових сигналів і детектора ультразвукових сигналів, виявлення множини ультразвукових сигналів, відображених щонайменше від частини фізичного просвіту, обробка і оцифровування першого набору ультразвукових сигналів, які отримані з множини відображених ультразвукових сигналів, для отримання множини наборів оцифрованих зразків, отримання множини послідовних кадрів з множини наборів оцифрованих зразків, де кожний кадр включає множину пікселів, і кожний піксель представляє один з множини оцифрованих зразків, відповідний одному з множини відображених ультразвукових сигналів із заздалегідь встановленої просторової ділянки фізичного просвіту, при цьому кожний кадр представляє повний поперечний переріз фізичного просвіту, і кожний кадр компонується щонайменше в одній з систем координат - полярних координатах або декартових координатах, а також етап отримання кадру першої різниці, що має множину пікселів, причому кожний піксель кадру першої різниці включає величину пікселя, де величина кожного пікселя відповідає сумі абсолютних різниць між пікселями, включеними в перший кадр множини кадрів, і відповідними пікселями, включеними у другий кадр множини кадрів, і отримання кадру другої різниці, що має множину пікселів, причому кожний піксель кадру другої різниці включає величину пікселя, де кожна величина кожного пікселя кадру другої різниці відповідає сумі абсолютних різниць між пікселями, включеними у другий кадр множини кадрів, і між відповідними пікселями, включеними в третій кадр множини кадрів, також отримання кадру максимальної величини, що має множину пікселів, причому кожний піксель кадру максимальної величини включає величину пікселя, де кожна величина кожного пікселя кадру максимальної величини відповідає максимальній величині, вибраній між величиною кожного пікселя кадру першої різниці і величиною кожного відповідного пікселя кадру другої різниці, і отримання кадру першої маски шляхом застосування операції нормалізації до кадру максимальної величини, де операція нормалізації включає етап розподілу величини кожного пікселя кадру максимальної величини на величину того пікселя в кадрі максимальної величини, який має найбільшу величину в кадрі максимальної величини, також етап отримання кадру другої маски шляхом виконання зведення в міру кожної величини пікселя кадру першої маски і віднімання кожної зведеної в міру величини пікселя з одиниці, і етап отримання поліпшеного кадру шляхом множення кожної величини пікселя вибраного кадру з множини кадрів на відповідну величину пікселя кадру другої маски, і виведення на дисплей зображення, відповідного поліпшеному кадру.
76. Спосіб за п. 75, який відрізняється тим, що фізичний просвіт являє собою кровоносну судину, кожний піксель, відповідний кожному кадру з множини кадрів, представляє або кровотік через кровоносну судину, або тканину кровоносної судини, або зовнішню тканину, навколишню кровоносній судині, картина кровотоку і зовнішній вигляд зовнішньої тканини на зображенні, відповідному поліпшеному кадру, пригнічена, і картина тканини судини поліпшена.
77. Спосіб виконання операції автоматичного поєднання по відношенню до операції відтворення зображень при інтраваскулярному ультразвуковому дослідженні, що включає такі етапи: розміщення всередині фізичної судини передавача ультразвукових сигналів і детектора ультразвукових сигналів, переміщення передавача ультразвукових сигналів і детектора ультразвукових сигналів вздовж довжини першого сегмента фізичної судини, виявлення першої множини ультразвукових сигналів, відображених щонайменше від частини фізичної судини, обробка і оцифровування першого набору ультразвукових сигналів, які отримані з першої множини відображених ультразвукових сигналів, для отримання першої множини наборів оцифрованих зразків, отримання першої множини послідовних кадрів для першої фільмокопії з множини наборів оцифрованих зразків, де кожний кадр включає першу множину елементів, кожний елемент представляє один з першої множини оцифрованих зразків, відповідний одній з першої множини відображених ультразвукових сигналів з першої заздалегідь встановленої просторової ділянки фізичної судини, при цьому кожний кадр представляє повний поперечний переріз фізичної судини, і кожний кадр компонується щонайменше в одній з систем координат - полярних координатах або декартових координатах, а також етап переміщення передавача ультразвукових сигналів і детектора ультразвукових сигналів вздовж довжини другого сегмента фізичної судини, де другий сегмент по суті перекриває перший сегмент, виявлення другої множини ультразвукових сигналів, відображених щонайменше від частини фізичної судини, обробка і оцифровування другого набору ультразвукових сигналів, які отримані з другої множини відображених ультразвукових сигналів, для отримання другої множини наборів оцифрованих зразків, отримання другої множини послідовних кадрів для другої фільмокопії з множини наборів оцифрованих зразків, де кожний кадр другої множини послідовних кадрів включає другу множину елементів, кожний елемент другої множини елементів представляє один з другої множини оцифрованих зразків, відповідний одній з другої множини відображених ультразвукових сигналів з другої заздалегідь встановленої просторової ділянки фізичної судини, при цьому кожний кадр другої множини послідовних кадрів представляє повний поперечний переріз фізичної судини, і кожний кадр другої множини послідовних кадрів компонується щонайменше в одній з систем координат - полярних координатах або декартових координатах, а також етап вибору як еталонного сегмента підмножини послідовних кадрів з другої фільмокопії, де еталонний сегмент представляє ділянку фізичної судини, також представлену підмножиною послідовних кадрів, отриманих з першої фільмокопії і сформованих як другий сегмент, і автоматичне поєднання еталонного сегмента і другого сегмента шляхом виконання операцій подібності між кадрами першої фільмокопії і кадрами еталонного сегмента.
78. Спосіб за п. 77, який відрізняється тим, що еталонний сегмент включає m послідовних кадрів, де m - додатнє ціле число, і автоматичне поєднання включає етап вибору m послідовних кадрів з першої фільмокопії, також етап виконання операції подібності між кожним кадром еталонного сегмента і кожним з m кадрів, вибраних на етапі вибору m послідовних кадрів з першої фільмокопії, для отримання m величин подібності, а також етап усереднення m величин подібності в єдине значення однорозмірної функції подібності і етап повторення вищезгаданих етапів, де кожний повтор включає відносний зсув еталонного сегмента відносно першої фільмокопії щонайменше на один кадр, і кожний зсув приводить до вибору нового набору m послідовних кадрів на етапі вибору m послідовних кадрів з першої фільмокопії, поки не буде отримана максимальна величина функції подібності, яка показує, що поєднання між еталонним сегментом і другим сегментом завершене.
79. Спосіб за п. 78, який відрізняється тим, що перед виконанням операції подібності між кожним кадром еталонного сегмента і кожним з m кадрів, відібраних під час вибору m послідовних кадрів з першої фільмокопії, для отримання m величин подібності додатково включає етап стабілізації кожного з кадрів еталонного сегмента відносно еквівалентного кадру з вибраних m послідовних кадрів для компенсації щонайменше одного з переміщень - жорсткого обертального руху або жорсткого декартового зміщення.
80. Спосіб за п. 77, який відрізняється тим, що додатково включає етап виведення на дисплей першої фільмокопії синхронно з другою фільмокопією, так що зображення першої фільмокопії і зображення другої фільмокопії, що показуються одночасно, відповідають одній і тій же ділянці вздовж фізичної судини.
81. Спосіб за п. 77, який відрізняється тим, що після виконання переміщення передавача ультразвукових сигналів і детектора ультразвукових сигналів вздовж довжини першого сегмента фізичної судини включає етап витягання з фізичної судини передавача ультразвукових сигналів і детектора ультразвукових сигналів, і етап повторного введення в фізичну судину передавача ультразвукових сигналів і детектора ультразвукових сигналів для виконання переміщення передавача ультразвукових сигналів і детектора ультразвукових сигналів вздовж довжини другого сегмента фізичної судини.
82. Спосіб контролю локальної вазомоторної реакції кровоносної судини, що включає такі етапи: розміщення всередині кровоносної судини передавача ультразвукових сигналів і детектора ультразвукових сигналів, виявлення множини ультразвукових сигналів, відображених щонайменше від частини кровоносної судини, обробка і оцифровування першого набору ультразвукових сигналів, які отримані з множини відображених ультразвукових сигналів, для отримання щонайменше першого набору оцифрованих зразків і другого набору оцифрованих зразків, отримання з першого набору оцифрованих зразків першого двовимірного масиву, що включає першу множину елементів, де кожний з першої множини елементів представляє оцифрований зразок, відповідний одному з множини відображених ультразвукових сигналів із заздалегідь встановленої просторової ділянки кровоносної судини, при цьому набір даних першого двовимірного масиву представляє повний поперечний переріз кровоносної судини, а перший двовимірний масив компонується в системі полярних векторів, перша вісь першого двовимірного масиву представляє координату r, і друга вісь першого двовимірного масиву представляє кутову координату, а також етап отримання з другого набору оцифрованих зразків другого двовимірного масиву, що включає набір даних, де: другий двовимірний масив включає другу множину елементів, при цьому кожний з другої множини елементів являє собою оцифрований зразок, відповідний одному з множини відображених ультразвукових сигналів із заздалегідь встановленої просторової ділянки, набір даних другого двовимірного масиву представляє повний поперечний переріз кровоносної судини, другий двовимірний масив компонується в системі полярних векторів, перша вісь другого двовимірного масиву представляє координату r, і друга вісь другого двовимірного масиву представляє кутову координату, і етап виявлення величини і напряму локальної вазомоторної реакції шляхом застосування множини одновимірних зсувів для набору даних кожного полярного вектора другого двовимірного масиву і шляхом виконання операції подібності між зсунутим набором даних кожного полярного вектора другого двовимірного масиву і набором даних кожного відповідного полярного вектора першого двовимірного масиву.
83. Спосіб за п. 82, який відрізняється тим, що виявлення локальної вазомоторної реакції дає величину локальної вазомоторної реакції для кожного полярного вектора другого двовимірного масиву, а також додатково включається етап усереднення кожної величини локальної вазомоторної реакції для отримання єдиної середньої величини вазомоторної реакції для другого двовимірного масиву, де єдина середня величина вазомоторної реакції показує глобальну вазомоторну реакцію.
84. Спосіб за п. 83, який відрізняється тим, що додатково включає етап безперервного компонування додаткових двовимірних масивів, етап виявлення і усереднення додаткових величин локальної вазомоторної реакції в кожному додатковому двовимірному масиві для отримання додаткової єдиної середньої величини вазомоторної реакції для кожного додаткового двовимірного масиву, і етап виведення на дисплей кожної додаткової єдиної середньої величини вазомоторної реакції, які разом складають криву вазомоторної реакції.
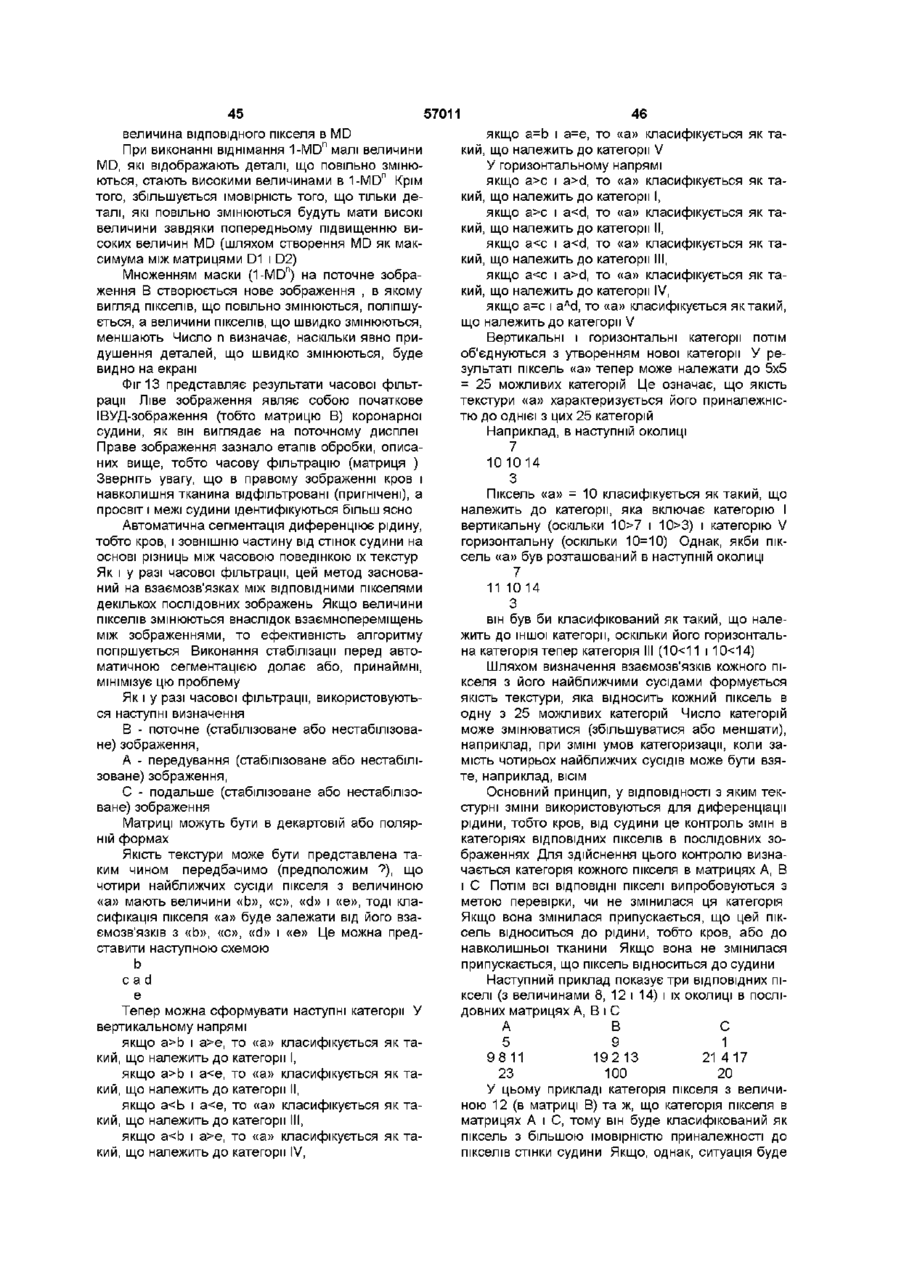
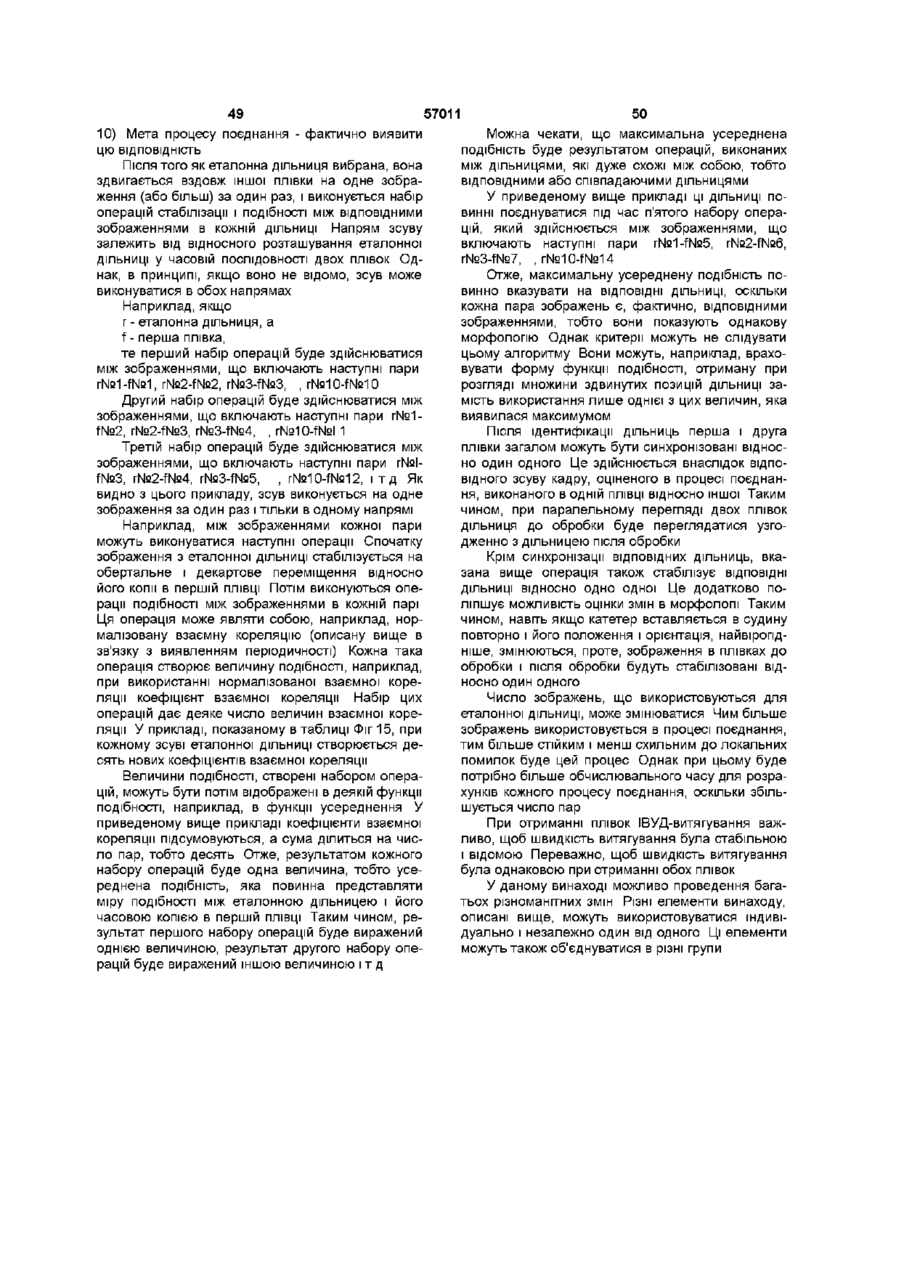
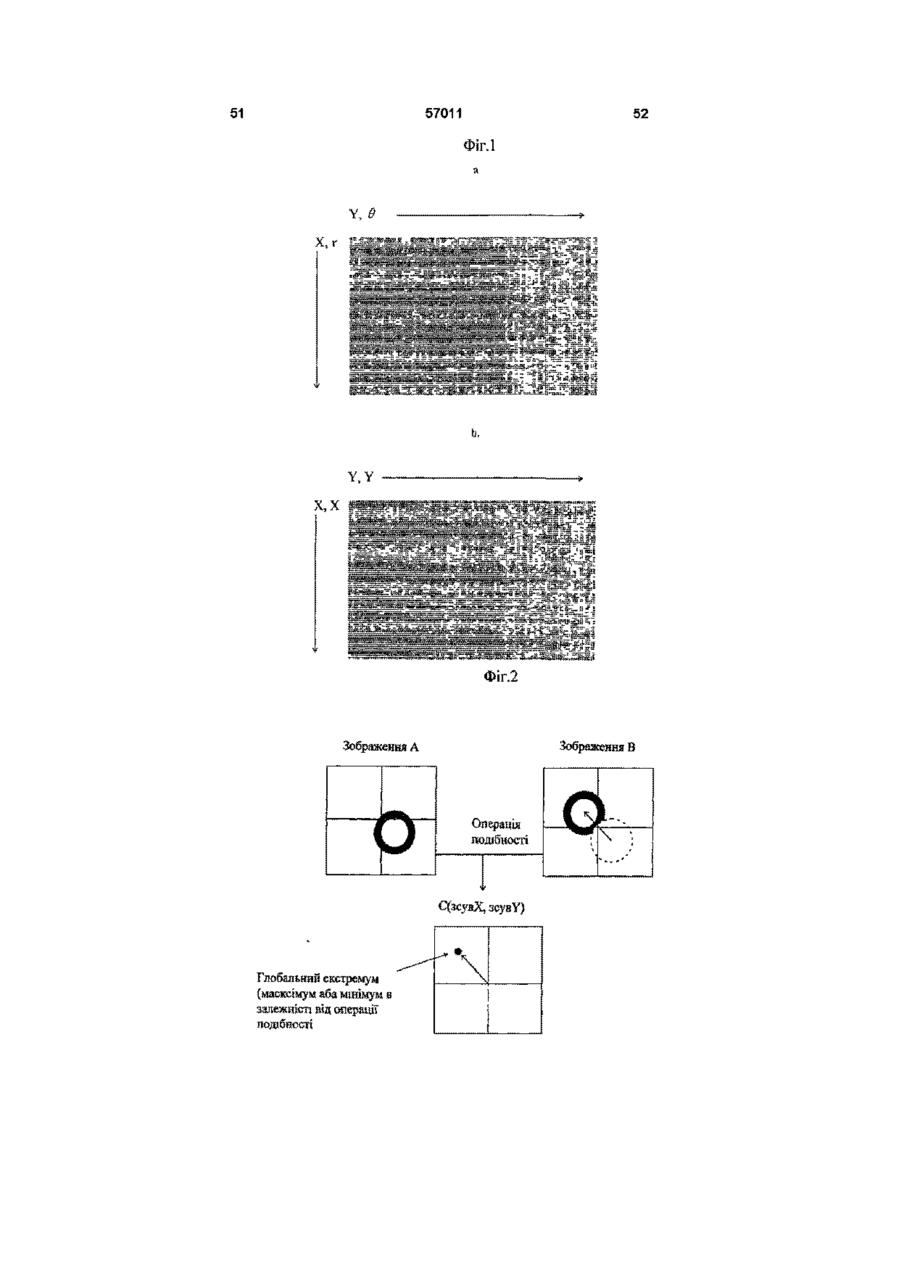
Текст
1 Спосіб штраваскулярного ультразвукового відтворення зображень, що включає такі етапи розміщення передавача і детектора ультразвукових сигналів всередині фізичного просвіту, виявлення ультразвукових сигналів, отримання першого зображення з першого набору виявлених ультразвукових сигналів, обробка і оцифровування першого набору виявлених ультразвукових сигналів, отримання першого двовимірного масиву з оцифрованого першого набору виявлених ультразвукових сигналів, де перший двовимірний масив включає першу множину елементів, при цьому перше зображення компонується як перший двовимірний масив, отримання другого зображення з другого набору виявлених ультразвукових сигналів, обробка і оцифровування другого набору виявлених ультразвукових сигналів, отримання другого двовимірного масиву з оцифрованого другого набору виявлених ультразвукових сигналів, при цьому друге зображення компонується як другий двовимірний масив, де другий двовимірний масив включає другу множину елементів, при цьому і перша множина елементів, і друга множина елементів являють собою виявлений ультразвуковий сигнал із заздалегідь встановленої просторової ділянки, який відрізняється тим, що додатково включає етап виконання оцінки зсуву другого зображення відносно першого зображення для виявлення переміщення 2 Спосіб за п 1, який відрізняється тим, що і перший двовимірний масив, і другий двовимірний масив компонуються в полярних координатах, і оцінку зсуву виконують в полярних координатах щонайменше в одному вимірюванні 3 Спосіб за п 1, який відрізняється тим, що етап оцінки зсуву включає щонайменше одну операцію подібності 4 Спосіб за п 3, який відрізняється тим, що щонайменше одна операція подібності включає щонайменше один з методів аналізу - взаємну кореляцію, нормалізовану взаємну кореляцію або CAP (сума абсолютних різниць) 5 Спосіб за п 4, який відрізняється тим, що взаємна кореляція включає щонайменше один з методів аналізу - позитивну взаємну кореляцію або перетворення Фур'є 6 Спосіб за п 1, який відрізняється тим, що і перший двовимірний масив, і другий двовимірний масив компонуються в декартових координатах, і оцінку зсуву виконують в декартових координатах щонайменше в одному вимірюванні 7 Спосіб за п 2, який відрізняється тим, що виявлене переміщення відповідає щонайменше одному з видів переміщення - обертальному руху або вазомоторній реакції 8 Спосіб за п 7, який відрізняється тим, що обертальний рух відповідає щонайменше одному з обертальних рухів - глобальному обертальному руху, жорсткому обертальному руху або локальному обертальному руху, і вазомоторна реакція відповідає щонайменше одній з вазомоторних реакцій - глобальній вазомоторній реакції або локальній вазомоторній реакції 9 Спосіб за п 6, який відрізняється тим, що виявлене переміщення відповідає декартовому зміщенню 10 Спосіб за п 9, який відрізняється тим, що декартове зміщення відповідає щонайменше одному із зміщень - жорсткому декартовому зміщенню або локальному декартовому зміщенню 11 Спосіб штраваскулярного ультразвукового відтворення зображень, що включає такі етапи розміщення передавача і детектора ультразвукових сигналів всередині фізичного просвіту, виявлення множини ультразвукових сигналів, отримання послідовних наборів ультразвукових сигналів з множини ультразвукових сигналів, отримання множини послідовних зображень з послідовних наборів ультразвукових сигналів, який відрізняється тим, що додатково включає етап контролю змін у ВІДПОВІДНИХ величинах пікселів, що належать послідовним зображенням в множині зображень О о ю 57011 12 Спосіб за п 11, який відрізняється тим, що додатково включає етап поліпшення зображення шляхом фільтрації змін у ВІДПОВІДНИХ величинах пікселів 13 Спосіб за п 11, який відрізняється тим, що додатково включає етапи контролю змін в текстурі ВІДПОВІДНИХ величин пікселів і виконання автоматичної сегментації зображення, включаючи ідентифікацію просвіту 14 Спосіб штраваскулярного ультразвукового відтворення зображень, що включає такі етапи розміщення передавача і детектора ультразвукових сигналів всередині фізичного просвіту, виявлення множини ультразвукових сигналів, отримання послідовних наборів ультразвукових сигналів з множини ультразвукових сигналів, отримання множини послідовних зображень з послідовних наборів ультразвукових сигналів, який відрізняється тим, що додатково включає етапи оцінки кожної пари послідовних зображень і отримання функції подібності, причомудля кожної пари послідовних зображень етап оцінки включає етап виконання операції подібності між першим зображенням з пари зображень і другим зображенням з пари зображень, і кожне значення функції подібності є результатом виконаної операції подібності 15 Спосіб за п 14, який відрізняється тим, що операція подібності відповідає щонайменше одному з методів аналізу - взаємній кореляції, нормалізованій взаємній кореляції або CAP 16 Спосіб штраваскулярного ультразвукового відтворення зображень, що включає такі етапи розміщення передавача і детектора ультразвукових сигналів всередині фізичного просвіту, виявлення множини ультразвукових сигналів, отримання послідовних наборів ультразвукових сигналів з множини ультразвукових сигналів, отримання множини послідовних зображень з послідовних наборів ультразвукових сигналів, який відрізняється тим, що додатково включає етап виконання оцінки зсуву для кожного зображення відносно попереднього зображення для контролю в кожному з послідовних зображень вазомоторної реакції фізичного просвіту 17 Спосіб за п 16, який відрізняється тим, що вазомоторна реакція відповідає щонайменше одній з вазомоторних реакцій - локальній вазомоторній реакції або глобальній вазомоторній реакції 18 Спосіб за п 14, який відрізняється тим, що функцію подібності контролюють для кардюваскулярної періодичності 19 Спосіб за п 18, який відрізняється тим, що контроль функції подібності включає щонайменше один з методів аналізу - перетин порога, внутрішню функцію подібності, перетворення Фур'є або спектральний аналіз 20 Спосіб за п 14, який відрізняється тим, що функцію подібності аналізують на якість щонайменше одного зображення з множини послідовних зображень, що використовуються для формування функції подібності 21 Спосіб за п 14, який відрізняється тим, що для кожної пари послідовних зображень етап оцінки додатково включає етап виконання оцінки зсуву між першим зображенням з пари зображень і другим зображенням з пари зображень 22 Спосіб за п 7, який відрізняється тим, що додатково включає етап стабілізації другого зображення відносно першого зображення для щонайменше одного з переміщень - обертального руху або вазомоторної реакції, де етап стабілізації виконують в полярних координатах 23 Спосіб за п 9, який відрізняється тим, що додатково включає етап стабілізації другого зображення відносно першого зображення для декартового зміщення, де етап стабілізації виконують в декартових координатах 24 Спосіб за п 23, який відрізняється тим, що додатково включає етап виведення на дисплей першого зображення і стабілізованого другого зображення 25 Спосіб за п 22, який відрізняється тим, що етап стабілізації стабілізує щонайменше одне з переміщень - глобальне обертання, жорстке обертання, локальне обертання, локальну вазомоторну реакцію або глобальну вазомоторну реакцію 26 Спосіб за п 25, який відрізняється тим, що етап стабілізації щонайменше одного з переміщень - глобального обертання, жорсткого обертання або глобальної вазомоторної реакції - включає етап зсуву другого зображення в полярних координатах щонайменше в одному вимірюванні ВІДПОВІДНО до величини і напряму, отриманих внаслідок оцінки зсуву 27 Спосіб за п 26, який відрізняється тим, що додатково включає етап обмеження зносу, виникаючого через стабілізацію другого зображення відносно першого зображення 28 Спосіб за п 27, який відрізняється тим, що етап обмеження зносу включає етап зсуву другого зображення на величину, регульовану шляхом використання інформації, отриманої внаслідок контролю кардюваскулярної періодичності 29 Спосіб штраваскулярного ультразвукового відтворення зображень, що включає такі етапи розміщення передавача і детектора ультразвукових сигналів всередині фізичного просвіту, виявлення множини ультразвукових сигналів, отримання множини послідовних зображень з множини виявлених ультразвукових сигналів, який відрізняється тим, що додатково включає етапи виконання оцінки зсуву для кожного зображення відносно попереднього зображення, контролю змін у ВІДПОВІДНИХ величинах пікселів, що належать послідовним зображенням в множині зображень, контролю кардюваскулярної періодичності і стабілізації кожного зображення з множини зображень відносно попереднього зображення 30 Спосіб штраваскулярного ультразвукового відтворення зображень, що включає такі етапи розміщення передавача і детектора ультразвукових сигналів всередині фізичної судини, переміщення передавача і детектора ультразвукових сигналів поДІЛЯНЦІ фізичної судини, виявлення ультразвукових сигналів, отримання першого зображення з ультразвукових сигналів, виявлених під час першого переміщення передавача і детектора ультразвукових сигналів по судині, отримання другого зображення з ультразвукових сигналів, виявлених під час другого переміщення передавача і детектора ультразвукових сигналів по судині, який відрізняється тим, що додатково включає етапи ви 57011 конання оцінки зсуву і стабілізації другого зображення відносно першого зображення, і виведення на дисплей стабілізованого другого зображення 31 Спосіб штраваскулярного ультразвукового відтворення зображень, що включає такі етапи розміщення передавача і детектора ультразвукових сигналів всередині фізичної судини, переміщення передавача і детектора ультразвукових сигналів по ДІЛЯНЦІ фізичної судини, виявлення ультразвукових сигналів, отримання першого зображення з ультразвукових сигналів, виявлених в першій частині судини, отримання другого зображення з ультразвукових сигналів, виявлених у другій частині судини, який відрізняється тим, що додатково включає етапи виконання оцінки зсуву і стабілізації другого зображення відносно першого зображення, і виведення на дисплей стабілізованого другого зображення 32 Спосіб штраваскулярного ультразвукового відтворення зображень, що включає такі етапи розміщення передавача і детектора ультразвукових сигналів всередині фізичної судини, виконання першого переміщення передавача і детектора ультразвукових сигналів вздовж першої частини судини, виявлення першого набору ультразвукових сигналів, отримання першого ряду послідовних зображень з першого набору виявлених ультразвукових сигналів, отримання першого зображення з ультразвукових сигналів, виявлених в першій частині судини, виконання другого переміщення передавача і детектора ультразвукових сигналів вздовж другої частини судини, виявлення другого набору ультразвукових сигналів, отримання другого ряду послідовних зображень з другого набору виявлених ультразвукових сигналів, який відрізняється тим, що додатково включає етапи вибору з другого ряду послідовних зображень підгрупи послідовних зображень, сформованих як еталонний сегмент, виконання операції подібності між кожним зображенням з еталонного сегмента і кожним зображенням з множини підгруп зображень, отриманих з першого ряду послідовних зображень, і поєднання кожного зображення з еталонного сегмента з кожним зображенням з іншої підгрупи множини підгруп, де інша підгрупа являє собою підібраний сегмент 33 Спосіб за п 32, який відрізняється тим, що кожне зображення еталонного сегмента з'єднують за допомогою етапу поєднання з еквівалентним зображенням з підібраного сегмента, і кожне зображення еталонного сегмента охоплює по суті ту ж задану ділянку судини, що і еквівалентне зображення, що поєднується з ним 34 Спосіб за п 32, який відрізняється тим, що етап поєднання включає етап виконання відносного зсуву еталонного сегмента щонайменше на одне зображення відносно першого ряду послідовних зображень, де кожний зсув забезпечує виконання операцій подібності між зображеннями нової підгрупи з множини підгруп, отриманих з першого ряду послідовних зображень, і між зображеннями еталонного сегмента 35 Спосіб за п 34, який відрізняється тим, що етап поєднання додатково включає етап стабілізації кожного зображення еталонного сегмента відносно кожного еквівалентного зображення нової підгрупи 36 Спосіб за п 33, який відрізняється тим, що додатково включає етап стабілізації кожного зображення еталонного сегмента відносно кожного еквівалентного зображення підібраного сегмента 37 Спосіб за п 32, який відрізняється тим, що додатково включає етап стабілізації кожного зображення другого ряду послідовних зображень відносно кожного еквівалентного зображення першого ряду послідовних зображень 38 Спосіб за п 32, який відрізняється тим, що операція подібності включає один з методів аналізу - взаємну кореляцію або нормалізовану взаємну кореляцію 39 Спосіб за п 32, який відрізняється тим, що перша ділянка і друга ділянка фізичного просвіту приблизно однакові по довжині 40 Спосіб за п 1, який відрізняється тим, що передавач і детектор ультразвукових сигналів з'єднані із зондом 41 Спосіб за п 40, який відрізняється тим, що зонд являє собою щонайменше один з пристроїв катетер і спрямовуючий провід 42 Спосіб за п 1, який відрізняється тим, що передавач і детектор ультразвукових сигналів включають незалежний передавач і незалежний детектор 43 Спосіб за п 14, який відрізняється тим, що передавач і детектор ультразвукових сигналів включають незалежний передавач і незалежний детектор 44 Спосіб за п ЗО, який відрізняється тим, що передавач і детектор ультразвукових сигналів з'єднані із зондом, де зонд переміщує передавач і детектор ультразвукових сигналів 45 Спосіб за п 44, який відрізняється тим, що зонд являє собою щонайменше один з пристроїв катетер і спрямовуючий провід 46 Спосіб за п ЗО, який відрізняється тим, що передавач і детектор ультразвукових сигналів включають незалежний передавач і незалежний детектор 47 Спосіб за п 31, який відрізняється тим, що передавач і детектор ультразвукових сигналів з'єднані із зондом, де зонд переміщує передавач і детектор ультразвукових сигналів 48 Спосіб за п 47, який відрізняється тим, що зонд являє собою щонайменше один з пристроїв катетер і спрямовуючий провід 49 Спосіб за п 31, який відрізняється тим, що передавач і детектор ультразвукових сигналів включають незалежний передавач і незалежний детектор 50 Спосіб за п 32, який відрізняється тим, що передавач і детектор ультразвукових сигналів з'єднані із зондом, де зонд переміщує передавач і детектор ультразвукових сигналів 51 Спосіб за п 50, який відрізняється тим, що зонд являє собою щонайменше один з пристроїв катетер і спрямовуючий провід 52 Спосіб за п 32, який відрізняється тим, що передавач і детектор ультразвукових сигналів включають незалежний передавач і незалежний детектор 57011 53 Спосіб за п 23, який відрізняється тим, що декартове зміщення включає одне із зміщень глобальне декартове зміщення, локальне декартове зміщення або жорстке декартове зміщення, і етап стабілізації включає етап стабілізації щонайменше одного із зміщень - глобального декартового зміщення, локального декартового зміщення або жорсткого декартового зміщення 54 Спосіб за п 53, який відрізняється тим, що етап стабілізації щонайменше одного із зміщень глобального декартового зміщення і жорсткого декартового зміщення - виконують шляхом зсуву другого зображення в декартових координатах щонайменше в одному вимірюванні ВІДПОВІДНО ДО величини і напряму, отриманих внаслідок оцінки зсуву 55 Спосіб за п 54, який відрізняється тим, що додатково включає етап обмеження зносу, виникаючого через стабілізацію другого зображення відносно першого зображення 56 Спосіб за п 55, який відрізняється тим, що етап обмеження зносу включає етап зсуву другого зображення на величину, регульовану шляхом використання інформації, отриманої внаслідок контролю кардюваскулярної періодичності 57 Спосіб виконання операції відтворення зображень при штраваскулярному ультразвуковому дослідженні, що включає такі етапи розміщення всередині фізичного просвіту передавача ультразвукових сигналів і детектора ультразвукових сигналів, виявлення множини ультразвукових сигналів, відображених щонайменше від частини фізичного просвіту, обробка і оцифровування першого набору ультразвукових сигналів, які отримані з множини відображених ультразвукових сигналів, для створення щонайменше першого набору оцифрованих зразків і другого набору оцифрованих зразків, отримання з першого набору оцифрованих зразків першого двовимірного масиву, що включає набір даних, де перший двовимірний масив включає першу множину елементів, при цьому кожний з першої множини елементів являє собою оцифрований зразок, ВІДПОВІДНИЙ одному з множини відображених ультразвукових сигналів із заздалегідь встановленої просторової ділянки фізичного просвіту, а набір даних першого двовимірного масиву представляє повний поперечний переріз фізичного просвіту, перший двовимірний масив компонується в полярних координатах, перша вісь першого двовимірного масиву представляє координату г, і друга вісь першого двовимірного масиву представляє кутову координату, а також етап отримання з другого набору оцифрованих зразків другого двовимірного масиву, що включає набір даних, де другий двовимірний масив включає другу множину елементів, при цьому кожний з другої множини елементів являє собою оцифрований зразок, ВІДПОВІДНИЙ одному з множини відображених ультразвукових сигналів із заздалегідь встановленої просторової ділянки, набір даних другого двовимірного масиву представляє повний поперечний переріз фізичного просвіту, другий двовимірний масив компонується в полярних координатах, перша вісь другого двовимірного масиву представляє координату г, і друга вісь другого двовимірного масиву представляє кутову коорди 8 нату, який відрізняється тим, що включає додаткові етапи, а саме виконання оцінки зсуву і операції виявлення другого двовимірного масиву відносно першого двовимірного масиву для виявлення величини і напряму щонайменше одного з переміщень - глобальної вазомоторної реакції або жорсткого обертання, - представлених набором даних, ВІДПОВІДНИХ другому двовимірному масиву, відносно набору даних, ВІДПОВІДНИХ першому двовимірному масиву, і стабілізацію другого двовимірного масиву шляхом застосування зсуву, що має вибрану величину і вибраний напрям, до другого двовимірного масиву для рівномірного зсуву вздовж щонайменше однієї з першої і другої осей другого двовимірного масиву кожного з другої множини елементів ВІДПОВІДНО до вибраної величини і вибраного напряму, при цьому етап стабілізації забезпечує компенсацію щонайменше одного з переміщень - жорсткого обертання або глобальної вазомоторної реакції, - де вибрана величина і вибраний напрям зсуву отримані внаслідок оцінки зсуву і операції виявлення 58 Спосіб за п 57, який відрізняється тим, що етап виконання оцінки зсуву і операції виявлення включає етап створення першого складного двовимірного масиву, що має першу множину складних елементів, шляхом застосування двовимірного перетворення Фур'є до першого двовимірного масиву, етап створення другого складного двовимірного масиву, що має другу множину складних елементів, шляхом застосування двовимірного перетворення Фур'є до другого двовимірного масиву, етап отримання результату сполучення другої множини елементів, етап множення кожного з першої множини складних елементів на ВІДПОВІДНИЙ результат сполучення другої множини складних елементів, етап представлення результату кожного множення в третьому двовимірному масиві, де кожний складний елемент даних в третьому складному двовимірному масиві є результатом множення елемента першого складного двовимірного масиву на ВІДПОВІДНИЙ зв'язаний елемент другого складного двовимірного масиву, етап виконання інверсного двовимірного перетворення Фур'є для третього складного двовимірного масиву, етап отримання дійсного компонента з кожного елемента перетвореного третього складного двовимірного масиву, етап представлення кожного отриманого дійсного компонента в четвертому двовимірному масиві і етап визначення місцезнаходження глобального максимуму четвертого двовимірного масиву, при цьому величина і напрям щонайменше одного з переміщень - жорсткого обертання або глобальної вазомоторної реакції - визначаються місцезнаходженням глобального максимуму вздовж щонайменше однієї з першої і другої осей четвертого двовимірного масиву 59 Спосіб за п 57, який відрізняється тим, що виконання оцінки зсуву і операції виявлення включає етап рівномірного зсуву кожного елемента другого двовимірного масиву вздовж першої осі другого двовимірного масиву на першу задану величину в першому заданому напрямі, етап рівномірного зсуву кожного елемента другого двовимірного масиву вздовж другої осі другого двовимі 57011 рного масиву на другу задану величину у другому заданому напрямі, етап виконання операції подібності між ВІДПОВІДНИМИ елементами зсунутого другого двовимірного масиву і першого двовимірного масиву, етап представлення величини, отриманої внаслідок операції подібності, у вигляді елемента третього двовимірного масиву, і етап повторення вищезгаданих етапів, де кожний повтор виконують шляхом зсуву кожного елемента другого двовимірного масиву вздовж першої осі на нову першу величину в новому першому напрямі і вздовж другої осі на нову другу величину в новому другому напрямі, поки не буде встановлене місцезнаходження глобального екстремуму всіх можливих значень третього двовимірного масиву, де величина і напрям щонайменше одного з переміщень жорсткого обертання або глобальної вазомоторної реакції - визначаються місцезнаходженням глобального екстремуму вздовж щонайменше однієї з першої або другої осей третього двовимірного масиву 60 Спосіб за п 7, який відрізняється тим, що додатково включає зменшення КІЛЬКОСТІ повторів рівномірного зсуву кожного елемента другого двовимірного масиву вздовж першої осі другого двовимірного масиву на першу задану величину в першому заданому напрямі, повторів рівномірного зсуву кожного елемента другого двовимірного масиву вздовж другої осі другого двовимірного масиву на другу задану величину у другому заданому напрямі, повторів виконання операції подібності між ВІДПОВІДНИМИ елементами зсунутого другого двовимірного масиву і першого двовимірного масиву, повторів представлення величини, отриманої внаслідок операції подібності, у вигляді елемента третього двовимірного масиву, причому зменшення КІЛЬКОСТІ повторів досягається шляхом здійснення щонайменше одного з етапів виконання операції отримання вибірок з першого двовимірного масиву і другого двовимірного масиву перед рівномірним зсувом кожного елемента другого двовимірного масиву вздовж першої осі другого двовимірного масиву на першу задану величину в першому заданому напрямі, і з етапу ініціювання пошуку глобального екстремуму третього двовимірного масиву при кожній початковій величині зсуву вздовж першої осі і вздовж другої осі другого двовимірного масиву рівного нулю, де знайдений локальний екстремум третього двовимірного масиву відповідає глобальному екстремуму третього двовимірного масиву 61 Спосіб виконання операції відтворення зображень при штраваскулярному ультразвуковому дослідженні, що включає такі етапи розміщення всередині фізичного просвіту передавача ультразвукових сигналів і детектора ультразвукових сигналів, виявлення множини ультразвукових сигналів, відображених щонайменше від частини фізичного просвіту, обробка і оцифровування першого набору ультразвукових сигналів, отримані з множини відображених ультразвукових сигналів, для створення щонайменше першого набору оцифрованих зразків і другого набору оцифрованих зразків, отримання з першого набору оцифрованих зразків першого двовимірного масиву, що включає набір даних, де перший двовимірний масив вклю 10 чає першу множину елементів, при цьому кожний з першої множини елементів являє собою оцифрований зразок, ВІДПОВІДНИЙ одному з множини відображених ультразвукових сигналів із заздалегідь встановленої просторової ділянки фізичного просвіту, а набір даних першого двовимірного масиву представляє повний поперечний переріз фізичного просвіту, перший двовимірний масив компонується в декартових координатах, перша вісь першого двовимірного масиву представляє координату X, і друга вісь першого двовимірного масиву представляє координату Y, а також етап отримання з другого набору оцифрованих зразків другого двовимірного масиву, що включає набір даних, де другий двовимірний масив включає другу множину елементів, при цьому кожний з другої множини елементів являє собою оцифрований зразок, ВІДПОВІДНИЙ одному з множини відображених ультразвукових сигналів із заздалегідь встановленої просторової ділянки, набір даних другого двовимірного масиву представляє повний поперечний переріз фізичного просвіту, другий двовимірний масив компонується в декартових координатах, перша вісь другого двовимірного масиву представляє координату X, а друга вісь другого двовимірного масиву представляє координату Y, який відрізняється тим, що включає додаткові етапи, а саме виконання оцінки зсуву і операції виявлення другого двовимірного масиву відносно першого двовимірного масиву для виявлення величини і напряму жорсткого декартового зміщення вздовж щонайменше однієї з координат X і Y, представлених набором даних, ВІДПОВІДНИХ другому двовимірному масиву, відносно набору даних, ВІДПОВІДНИХ першому двовимірному масиву, і стабілізацію другого двовимірного масиву шляхом застосування зсуву, що має вибрану величину і вибраний напрям, до другого двовимірного масиву для рівномірного зсуву вздовж щонайменше однієї з першої і другої осей другого двовимірного масиву кожного з другої множини елементів ВІДПОВІДНО до вибраної величини і вибраного напряму, при цьому етап стабілізації забезпечує компенсацію жорсткого декартового зміщення, де вибрана величина і вибраний напрям отримані внаслідок оцінки зсуву і операції виявлення 62 Спосіб за п 61, який відрізняється тим, що додатково включає етап виведення на дисплей зображення, ВІДПОВІДНОГО першому двовимірному масиву і зображення, ВІДПОВІДНОГО стабілізованому другому двовимірному масиву 63 Спосіб за п 61, який відрізняється тим, що виконання оцінки зсуву і операції виявлення включає етап створення першого складного двовимірного масиву, що має першу множину складних елементів, шляхом застосування двовимірного перетворення Фур'є до першого двовимірного масиву, етап створення другого складного двовимірного масиву, що має другу множину складних елементів, шляхом застосування двовимірного перетворення Фур'є до другого двовимірного масиву, етап отримання результату сполучення другої множини елементів, етап множення кожного з першої множини складних елементів на ВІДПОВІДНИЙ результат сполучення другої множини складних елементів, етап представлення резуль 11 57011 12 тату кожного множення в третьому двовимірному масиві, де кожний складний елемент даних в третьому складному двовимірному масиві є результатом множення елемента першого складного двовимірного масиву на ВІДПОВІДНИЙ зв'язаний елемент другого складного двовимірного масиву, етап виконання інверсного двовимірного перетворення Фур'є для третього складного двовимірного масиву, етап отримання дійсного компонента з кожного елемента перетвореного третього складного двовимірного масиву, етап представлення кожного отриманого дійсного компонента в четвертому двовимірному масиві і етап визначення місцезнаходження глобального максимуму четвертого двовимірного масиву, при цьому величина і напрям жорсткого декартового зміщення вздовж щонайменше однієї з осей X і Y визначаються місцезнаходженням глобального максимуму вздовж щонайменше однієї з першої або другої осей четвертого двовимірного масиву 64 Спосіб за п 61, який відрізняється тим, що виконання оцінки зсуву і операції виявлення включає етап рівномірного зсуву кожного елемента другого двовимірного масиву вздовж першої осі другого двовимірного масиву на першу задану величину в першому заданому напрямі, етап рівномірного зсуву кожного елемента другого двовимірного масиву вздовж другої осі другого двовимірного масиву на другу задану величину у другому заданому напрямі, етап виконання операції подібності між ВІДПОВІДНИМИ елементами зсунутого другого двовимірного масиву і першого двовимірного масиву, етап представлення величини, отриманої внаслідок операції подібності, у вигляді елемента третього двовимірного масиву і етап повторення вищезгаданих етапів, де кожний повтор виконують шляхом зсуву кожного елемента другого двовимірного масиву вздовж першої осі на нову першу величину в новому першому напрямі і вздовж другої осі на нову другу величину в новому другому напрямі, поки не буде встановлене місцезнаходження глобального екстремуму всіх можливих значень третього двовимірного масиву, де величина і напрям жорсткого декартового зміщення вздовж щонайменше однієї з осей X і Y визначаються місцезнаходженням глобального екстремуму вздовж щонайменше однієї з першої або другої осей третього двовимірного масиву рного масиву і другого двовимірного масиву перед рівномірним зсувом кожного елемента другого двовимірного масиву вздовж першої осі другого двовимірного масиву на першу задану величину в першому заданому напрямі, і з етапу ініціювання пошуку глобального екстремуму третього двовимірного масиву за умови, що кожна початкова величина зсуву вздовж першої осі і вздовж другої осі другого двовимірного масиву рівна нулю, де знайдений локальний екстремум третього двовимірного масиву відповідає глобальному екстремуму третього двовимірного масиву 66 Спосіб за п 57, який відрізняється тим, що додатково включає етап перетворення першого двовимірного масиву в третій двовимірний масив, що включає набір даних і компонується в декартових координатах, де перша вісь третього двовимірного масиву відповідає координаті X, і друга вісь третього двовимірного масиву відповідає координаті Y, а також етап перетворення стабілізованого другого двовимірного масиву в четвертий двовимірний масив, що включає набір даних і компонується в декартових координатах, де четвертий двовимірний масив включає множину елементів, перша вісь четвертого двовимірного масиву відповідає координаті X, а друга вісь четвертого двовимірного масиву відповідає координаті Y, етап виконання оцінки зсуву і операції виявлення четвертого двовимірного масиву відносно третього двовимірного масиву для виявлення величини і напряму жорсткого декартового зміщення вздовж щонайменше однієї з координат X і Y, представлених набором даних, ВІДПОВІДНИХ четвертому двовимірному масиву, відносно набору даних, ВІДПОВІДНИХ третьому двовимірному масиву, етап стабілізації четвертого двовимірного масиву шляхом застосування зсуву, що має вибрану величину і вибраний напрям, до четвертого двовимірного масиву для рівномірного зсуву вздовж щонайменше однієї з першої і другої осей четвертого двовимірного масиву кожного з множини елементів четвертого двовимірного масиву ВІДПОВІДНО ДО вибраної величини і вибраного напряму, при цьому етап стабілізації забезпечує компенсацію жорсткого декартового зміщення, де вибрана величина і вибраний напрям отримані внаслідок оцінки зсуву і операції виявлення для четвертого двовимірного масиву відносно третього двовимірного масиву 65 Спосіб за п 64, який відрізняється тим, що додатково включає зменшення КІЛЬКОСТІ повторів рівномірного зсуву кожного елемента другого двовимірного масиву вздовж першої осі другого двовимірного масиву на першу задану величину в першому заданому напрямі, повторів рівномірного зсуву кожного елемента другого двовимірного масиву вздовж другої осі другого двовимірного масиву на другу задану величину у другому заданому напрямі, повторів виконання операції подібності між ВІДПОВІДНИМИ елементами зсунутого другого двовимірного масиву і першого двовимірного масиву, повторів представлення величини, отриманої внаслідок операції подібності, у вигляді елемента третього двовимірного масиву, причому зменшення КІЛЬКОСТІ повторів досягається шляхом здійснення щонайменше одного з етапів виконання операції отримання вибірок з першого двовимі 67 Спосіб за п 57, який відрізняється тим, що додатково включає етап виведення на дисплей зображення, ВІДПОВІДНОГО третьому двовимірному масиву і зображення, ВІДПОВІДНОГО стабілізованому четвертому двовимірному масиву 68 Спосіб отримання і обробки функції подібності для контролю кардюваскулярної періодичності з операції відтворення зображень при інтраваскулярному ультразвуковому дослідженні, що включає такі етапи розміщення всередині фізичного просвіту передавача ультразвукових сигналів і детектора ультразвукових сигналів, виявлення множини ультразвукових сигналів, відображених щонайменше від частини фізичного просвіту, обробка і оцифровування першого набору ультразвукових сигналів, отриманих з множини відображених ультразвукових сигналів, для отримання щонайменше першої множини послідовних кадрів, де кожний 57011 14 13 кадр включає набір даних, причому кожний кадр привласнена текстурна категорія отримана з ВІДвключає множину елементів, і кожний з множини ПОВІДНОГО пікселя, що є одним з великих, меншого елементів представляє оцифрований зразок, ВІДабо рівного по величині кожному найближчому ПОВІДНИЙ одному з множини відображених ультрасуміжному пікселю, виявлення зміни в привласнезвукових сигналів із заздалегідь встановленої проній текстурній категорії кожного пікселя шляхом сторової ділянки фізичного просвіту, а набір даних контролю текстурної категорії, привласненої кожвідповідає кожному з множини кадрів, також предному пікселю, включеному в кожний з множини ставлений повний поперечний переріз фізичного кадрів, і створення двійкового кадру шляхом викопросвіту, і кожний з множини кадрів компонується нання розподілу кожного пікселя, ВІДПОВІДНОГО одщонайменше в одній з систем координат - в деканому з кадрів, вибраному з множини кадрів, в пертових координатах або полярних координатах, а рший клас або у другий клас, і привласнення також етап отримання одновимірної функції, сфодвійкової величини кожному пікселю, відповідному рмованої у вигляді функції подібності, при цьому вибраному кадру, де перший клас означає відсутвеличина функції подібності відповідає f(n), де п ність зміни в текстурній категорії, привласненій додатне ціле число, і визначається операцією повідповідному пікселю, і де другий клас означає дібності, виконаною між елементами, що містяться присутність зміни в текстурній категорії, привласв n-ому кадрі, і між елементами, що містяться в неній відповідному пікселю n+1-ому кадрі, і обробка одновимірної функції для 74 Спосіб за п 73, який відрізняється тим, що отримання величини періодичності функції подібфізичним просвітом є кровоносна судина, і кожний ності піксель, ВІДПОВІДНИЙ кожному кадру, представляє 69 Спосіб за п 68, який відрізняється тим, що фізичним просвітом є кровоносна судина, і величина періодичності функції подібності відповідає величині кардюваскулярної періодичності 70 Спосіб за п 69, який відрізняється тим, що величина кардюваскулярної періодичності забезпечує можливість виконання операції кардюселекцм по відношенню до кардюваскулярного цикла 71 Спосіб за п 68, який відрізняється тим, що зображення, яке виводиться на дисплей, відповідає одному кадру з першої множини кадрів, що використовується для формування функції подібності, і відсутність періодичності функції подібності означає існування артефакту в зображенні для дисплея 72 Спосіб за п 71, який відрізняється тим, що артефакт викликаний всередині фізичного просвіту нерівномірністю обертання щонайменше одного з пристроїв - передавачаультразвукових сигналів або детектора ультразвукових сигналів 73 Спосіб автоматичного сегментування зображення при штраваскулярному ультразвуковому дослідженні, що включає такі етапи розміщення всередині фізичного просвіту передавача ультразвукових сигналів і детектора ультразвукових сигналів, виявлення множини ультразвукових сигналів, відображених щонайменше від частини фізичного просвіту, обробка і оцифровування першого набору ультразвукових сигналів, які отримані з множини відображених ультразвукових сигналів, для отримання множини наборів оцифрованих зразків, отримання множини послідовних кадрів з множини наборів оцифрованих зразків, де кожний кадр включає множину пікселів, і кожний піксель представляє один з множини оцифрованих зразків, ВІДПОВІДНИЙ одному з множини відображених ультразвукових сигналів із заздалегідь встановленої просторової ділянки фізичного просвіту, при цьому кожний кадр представляє повний поперечний переріз фізичного просвіту, і кожний кадр компонується щонайменше в одній з систем координат - полярних координатах або декартових координатах, а також етап привласнення однієї з множини текстурних категорій кожному пікселю, включеному в кожний кадр, на основі взаємовідносин кожного пікселя з суміжним пікселем, де кожна або кровотік через кровоносну судину, або тканину кровоносної судини, або зовнішню тканину, навколишню кровоносній судині, при цьому кожний піксель, ВІДПОВІДНИЙ першому класу, представляє тканину судини, а кожний піксель, ВІДПОВІДНИЙ другому класу, представляє кровотік або зовнішню тканину, і двійковий кадр піддають подальшій обробці для вибирання тієї області пікселів, яка пов'язана з кровотоком через кровоносну судину у вибраному кадрі 75 Спосіб поліпшення якості операції відтворення зображень при штраваскулярному ультразвуковому дослідженні, що включає такі етапи розміщення всередині фізичного просвіту передавача ультразвукових сигналів і детектора ультразвукових сигналів, виявлення множини ультразвукових сигналів, відображених щонайменше від частини фізичного просвіту, обробка і оцифровування першого набору ультразвукових сигналів, які отримані з множини відображених ультразвукових сигналів, для отримання множини наборів оцифрованих зразків, отримання множини послідовних кадрів з множини наборів оцифрованих зразків, де кожний кадр включає множину пікселів, і кожний піксель представляє один з множини оцифрованих зразків, ВІДПОВІДНИЙ одному з множини відображених ультразвукових сигналів із заздалегідь встановленої просторової ділянки фізичного просвіту, при цьому кожний кадр представляє повний поперечний переріз фізичного просвіту, і кожний кадр компонується щонайменше в одній з систем координат - полярних координатах або декартових координатах, а також етап отримання кадру першої різниці, що має множину пікселів, причому кожний піксель кадру першої різниці включає величину пікселя, де величина кожного пікселя відповідає сумі абсолютних різниць між пікселями, включеними в перший кадр множини кадрів, і ВІДПОВІДНИМИ пікселями, включеними у другий кадр множини кадрів, і отримання кадру другої різниці, що має множину пікселів, причому кожний піксель кадру другої різниці включає величину пікселя, де кожна величина кожного пікселя кадру другої різниці відповідає сумі абсолютних різниць між пікселями, включеними у другий кадр множини кадрів, і між ВІДПОВІДНИМИ пікселями, включеними в третій 15 кадр множини кадрів, також отримання кадру максимальної величини, що має множину пікселів, причому кожний піксель кадру максимальної величини включає величину пікселя, де кожна величина кожного пікселя кадру максимальної величини відповідає максимальній величині, вибраній між величиною кожного пікселя кадру першої різниці і величиною кожного ВІДПОВІДНОГО пікселя кадру другої різниці, і отримання кадру першої маски шляхом застосування операції нормалізації до кадру максимальної величини, де операція нормалізації включає етап розподілу величини кожного пікселя кадру максимальної величини на величину того пікселя в кадрі максимальної величини, який має найбільшу величину в кадрі максимальної величини, також етап отримання кадру другої маски шляхом виконання зведення в міру кожної величини пікселя кадру першої маски і віднімання кожної зведеної в міру величини пікселя з одиниці, і етап отримання поліпшеного кадру шляхом множення кожної величини пікселя вибраного кадру з множини кадрів на відповідну величину пікселя кадру другої маски, і виведення на дисплей зображення, ВІДПОВІДНОГО поліпшеному кадру 76 Спосіб за п 75, який відрізняється тим, що фізичний просвіт являє собою кровоносну судину, кожний піксель, ВІДПОВІДНИЙ кожному кадру з множини кадрів, представляє або кровотік через кровоносну судину, або тканину кровоносної судини, або зовнішню тканину, навколишню кровоносній судині, картина кровотоку і ЗОВНІШНІЙ ВИГЛЯД ЗОВНІШНЬОЇ тканини на зображенні, відповідному поліпшеному кадру, пригнічена, і картина тканини судини поліпшена 77 Спосіб виконання операції автоматичного поєднання по відношенню до операції відтворення зображень при штраваскулярному ультразвуковому дослідженні, що включає такі етапи розміщення всередині фізичної судини передавача ультразвукових сигналів і детектора ультразвукових сигналів, переміщення передавача ультразвукових сигналів і детектора ультразвукових сигналів вздовж довжини першого сегмента фізичної судини, виявлення першої множини ультразвукових сигналів, відображених щонайменше від частини фізичної судини, обробка і оцифровування першого набору ультразвукових сигналів, які отримані з першої множини відображених ультразвукових сигналів, для отримання першої множини наборів оцифрованих зразків, отримання першої множини послідовних кадрів для першої фільмокопії з множини наборів оцифрованих зразків, де кожний кадр включає першу множину елементів, кожний елемент представляє один з першої множини оцифрованих зразків, ВІДПОВІДНИЙ ОДНІЙ З першої множини відображених ультразвукових сигналів з першої заздалегідь встановленої просторової ділянки фізичної судини, при цьому кожний кадр представляє повний поперечний переріз фізичної судини, і кожний кадр компонується щонайменше в одній з систем координат - полярних координатах або декартових координатах, а також етап переміщення передавача ультразвукових сигналів і детектора ультразвукових сигналів вздовж довжини другого сегмента фізичної судини, де другий сегмент по суті перекриває перший сегмент, вияв 57011 16 лення другої множини ультразвукових сигналів, відображених щонайменше від частини фізичної судини, обробка і оцифровування другого набору ультразвукових сигналів, які отримані з другої множини відображених ультразвукових сигналів, для отримання другої множини наборів оцифрованих зразків, отримання другої множини послідовних кадрів для другої фільмокопії з множини наборів оцифрованих зразків, де кожний кадр другої множини послідовних кадрів включає другу множину елементів, кожний елемент другої множини елементів представляє один з другої множини оцифрованих зразків, ВІДПОВІДНИЙ ОДНІЙ З другої множини відображених ультразвукових сигналів з другої заздалегідь встановленої просторової ділянки фізичної судини, при цьому кожний кадр другої множини послідовних кадрів представляє повний поперечний переріз фізичної судини, і кожний кадр другої множини послідовних кадрів компонується щонайменше в одній з систем координат - полярних координатах або декартових координатах, а також етап вибору як еталонного сегмента підмножини послідовних кадрів з другої фільмокопії, де еталонний сегмент представляє ділянку фізичної судини, також представлену підмножиною послідовних кадрів, отриманих з першої фільмокопії і сформованих як другий сегмент, і автоматичне поєднання еталонного сегмента і другого сегмента шляхом виконання операцій подібності між кадрами першої фільмокопії і кадрами еталонного сегмента 78 Спосіб за п 77, який відрізняється тим, що еталонний сегмент включає m послідовних кадрів, де m - додатне ціле число, і автоматичне поєднання включає етап вибору m послідовних кадрів з першої фільмокопії, також етап виконання операції подібності між кожним кадром еталонного сегмента і кожним з m кадрів, вибраних на етапі вибору m послідовних кадрів з першої фільмокопії, для отримання m величин подібності, а також етап усереднення m величин подібності в єдине значення однорозмірної функції подібності і етап повторення вищезгаданих етапів, де кожний повтор включає відносний зсув еталонного сегмента відносно першої фільмокопії щонайменше на один кадр, і кожний зсув приводить до вибору нового набору m послідовних кадрів на етапі вибору m послідовних кадрів з першої фільмокопії, поки не буде отримана максимальна величина функції подібності, яка показує, що поєднання між еталонним сегментом і другим сегментом завершене 79 Спосіб за п 78, який відрізняється тим, що перед виконанням операції подібності між кожним кадром еталонного сегмента і кожним з m кадрів, відібраних під час вибору m послідовних кадрів з першої фільмокопії, для отримання m величин подібності додатково включає етап стабілізації кожного з кадрів еталонного сегмента відносно еквівалентного кадру з вибраних m послідовних кадрів для компенсації щонайменше одного з переміщень - жорсткого обертального руху або жорсткого декартового зміщення 80 Спосіб за п 77, який відрізняється тим, що додатково включає етап виведення на дисплей першої фільмокопії синхронно з другою фільмокопією, так що зображення першої фільмокопії і зо 57011 18 17 браження другої фільмокопії, що показуються одву, що включає набір даних, де другий двовимірночасно, відповідають одній і тій же ДІЛЯНЦІ ВЗДОВЖ ний масив включає другу множину елементів, при фізичної судини цьому кожний з другої множини елементів являє собою оцифрований зразок, ВІДПОВІДНИЙ одному з 81 Спосіб за п 77, який відрізняється тим, що множини відображених ультразвукових сигналів із після виконання переміщення передавача ультразаздалегідь встановленої просторової ділянки, звукових сигналів і детектора ультразвукових сигнабір даних другого двовимірного масиву предналів вздовж довжини першого сегмента фізичної ставляє повний поперечний переріз кровоносної судини включає етап витягання з фізичної судини судини, другий двовимірний масив компонується в передавача ультразвукових сигналів і детектора системі полярних векторів, перша вісь другого ультразвукових сигналів, і етап повторного введвовимірного масиву представляє координату г, і дення в фізичну судину передавача ультразвукодруга вісь другого двовимірного масиву представвих сигналів і детектора ультразвукових сигналів ляє кутову координату, і етап виявлення величини для виконання переміщення передавача ультраі напряму локальної вазомоторної реакції шляхом звукових сигналів і детектора ультразвукових сигзастосування множини одновимірних зсувів для налів вздовж довжини другого сегмента фізичної набору даних кожного полярного вектора другого судини двовимірного масиву і шляхом виконання операції 82 Спосіб контролю локальної вазомоторної реаподібності між зсунутим набором даних кожного кції кровоносної судини, що включає такі етапи полярного вектора другого двовимірного масиву і розміщення всередині кровоносної судини перенабором даних кожного ВІДПОВІДНОГО полярного давача ультразвукових сигналів і детектора ультвектора першого двовимірного масиву развукових сигналів, виявлення множини ультра звукових сигналів, відображених щонайменше від частини кровоносної судини, обробка і оцифровування першого набору ультразвукових сигналів, які отримані з множини відображених ультразвукових сигналів, для отримання щонайменше першого набору оцифрованих зразків і другого набору оцифрованих зразків, отримання з першого набору оцифрованих зразків першого двовимірного масиву, що включає першу множину елементів, де кожний з першої множини елементів представляє оцифрований зразок, ВІДПОВІДНИЙ одному з множини відображених ультразвукових сигналів із заздалегідь встановленої просторової ділянки кровоносної судини, при цьому набір даних першого двовимірного масиву представляє повний поперечний переріз кровоносної судини, а перший двовимірний масив компонується в системі полярних векторів, перша вісь першого двовимірного масиву представляє координату г, і друга вісь першого двовимірного масиву представляє кутову координату, а також етап отримання з другого набору оцифрованих зразків другого двовимірного маси 83 Спосіб за п 82, який відрізняється тим, що виявлення локальної вазомоторної реакції дає величину локальної вазомоторної реакції для кожного полярного вектора другого двовимірного масиву, а також додатково включається етап усереднення кожної величини локальної вазомоторної реакції для отримання єдиної середньої величини вазомоторної реакції для другого двовимірного масиву, де єдина середня величина вазомоторної реакції показує глобальну вазомоторну реакцію 84 Спосіб за п 83, який відрізняється тим, що додатково включає етап безперервного компонування додаткових двовимірних масивів, етап виявлення і усереднення додаткових величин локальної вазомоторної реакції в кожному додатковому двовимірному масиві для отримання додаткової єдиної середньої величини вазомоторної реакції для кожного додаткового двовимірного масиву, і етап виведення на дисплей кожної додаткової єдиної середньої величинивазомоторної реакції, які разом складають криву вазомоторної реакції Даний винахід відноситься до пристрою і способу обробки поліпшених зображень і сигналів при штраваскулярному ультразвуковому дослідженні («ІВУД»), і більш конкретний, до приладу і способу обробки ІВУД-зображень і інформаційних сигналів, які підвищують якість і корисність ІВУД-зображень Предісторія винаходу ІВУД-зображення отримують за допомогою променя ультразвукової, енергії, що випускається спеціальним апаратом, таким як перетворювач або масив перетворювачів, розташованих навколо, вздовж або на КІНЦІ катетера, який вводять в кровоносну судину Ультразвуковий промінь з апарату безперервно обертається всередині кровоносної судини і утворює зображення внутрішнього поперечного перетину на 360°, тобто зображення формується в поперечній площині (X-Y) У залежності від конкретної конструкції апарату, зобра ження може вийти або з однієї і тієї ж поперечної площини апарату, або з поперечної площини, яка здвинута кілька уперед (тобто дистальній) відносно поперечної площини апарату Якщо катетер переміщається всередині вздовж судини (тобто вздовж осі Z), то можуть бути сформовані і отримані зображення різних дільниць (ряд послідовних поперечних перетинів) судини ІВУД може використовуватися у всіх типах кровоносних судин, включаючи артерії, вени і ІНШІ периферичні судини, але не обмежуючись ними, а також у всіх частинах тіла Ультразвуковий сигнал, що приймується (виявляється) спочатку є аналоговим сигналом Цей сигнал обробляють з використанням аналогових і цифрових методів таким чином, щоб сформувати зрештою набір векторів, який містить оцифровані дані Кожний вектор подає ультразвуковий відгук 57011 19 окремого кутового сектора судини, тобто секції кровоносної судини КІЛЬКІСТЬ елементів даних в кожному векторі (осьове дискретне розрішення) судини може змінюватися в залежності від типу системи, що використовується Оцифровані вектори спочатку можуть бути включені в двомірний масив або матрицю з полярними координатами, тобто А(г, Э) У цій полярній матриці, наприклад, вісь X відповідає координаті г, а вісь Y відповідає координаті Э Кожне значення матриці являє собою величину (в діапазоні від 0 до 255, якщо це 8-бітова система), що показує значення ультразвукового відгуку на цій ДІЛЬНИЦІ Полярна матриця звичайно не передається на дисплей, оскільки результуюче зображення не може бути легко розшифроване лікарем Інформацію, що зберігається в полярній матриці А(г, Э), звичайно піддають декільком стадіям обробки і інтерполюють в декартові координати, наприклад, координати X і Y (A(X, Y)), які легше розшифровувати лікареві Таким чином, осі X і Y матриці А(Х, Y) будуть відповідати представленню поперечного перетину судини в декартових координатах Інформацію, що міститься в декартовій матриці, можливо, піддають подальшій обробці, а потім виводять на дисплей для аналізу лікарем Зображення можуть бути сформовані і виведені на дисплей з різною швидкістю, в залежності від системи Деякі системи можуть формувати і виводити зображення з відеошвидкістю, наприклад, до ЗО зображень за секунду ІВУД-дослідження дільниць фізичних просвітів, тобто судин, звичайно виконують шляхом розміщення катетера на віддаленні (нижче за течією) від ДІЛЬНИЦІ, що розглядаються, а потім катетер повільно витягують (ІВУД-витягування) вздовж фізичного просвіту (вздовж осі Z) таким чином, що на дисплей безперервно передаються ПОСЛІДОВНІ зображення, що створюють картину ДІЛЬНИЦІ У багатьох випадках катетер з'єднують з механічним переміщуючим пристроєм, який тягне катетер з постійною швидкістю (типова швидкість складає біля 0,5-1 мм/с) У СЬОГОДНІШНІХ системах ІВУД-дослідження, описана вище технологія представлення зображень поперечного перетину фізичного просвіту, наприклад, кровоносної судини, є загальноприйнятою Однак ці системи недосконалі, оскільки вони не містять ніяких форм стабілізації зображень для компенсації рухів катетера і/або фізичного просвіту, наприклад, кровоносної судини Добре відомо, що при ІВУД-дослідженні фізичного просвіту завжди спостерігається деякий рух катетера і/або фізичного просвіту Цей рух може відбуватися в поперечній площині (X-Y), вздовж осі судини (Z), або може спостерігатися поєднання цих рухів Відтворюючий катетер може також відхилятися відносно судини, так що площина зображення стає неперпендикулярною осі Z (такий рух називається кутовим викривленням) Ці рухи спричиняються, крім інших причин, биттям серця, протіканням крові і/або інших рідин через просвіт, вазомоторною реакцією, зусиллям, що прикладається лікарем і іншими зусиллями, зумовленими фізіологією пацієнта У СЬОГОДНІШНІХ системах ІВУД, якщо катетер 20 нерухомий або якщо ручне або механічне витягування здійснюється повільно, відносне переміщення між катетером і просвітом є основним фактором зміни вигляду просвіту між послідовними зображеннями, тобто картини, видимі на дисплеї і/або на ПЛІВЦІ або відеокасеті Ця зміна відбувається через те, що швидкість зміни зображень за рахунок відносних переміщень набагато більше, ніж швидкість змін в реальній морфології за рахунок витягування Стабілізація досягається втому випадку, якщо ПОСЛІДОВНІ зображення включають компенсацію відносних переміщень між катетером і просвітом Оскільки жодна з ІВУД-систем, що використовуються сьогодні, не забезпечує стабілізацію, в них не існує компенсації або корекціям відносних переміщень між катетером і просвітом Внаслідок цього морфологічні деталі постійно переміщаються або повертаються на дисплеї і/або на ПЛІВЦІ або відеокасеті Тому лікареві стає важко точно розшифрувати морфологію при динамічному відтворенні зображень ІВУД Крім того, коли нестабілізовані ІВУД-зображення подають у вигляді вхідних даних для алгоритму обробки, такого як 3Dреконструкція або різні типи фільтрів, які обробляють комплект послідовних зображень, це може привести до неповного функціонування пристрою і неправильного діагнозу, або до неточних визначень Сучасні ІВУД-апарати або катетери можуть давати випадкові збої електронного або механічного походження Це може стати причиною того, що зображення на екрані дисплея, як розпізнані, так і нерозпізнані, будуть артефакти, що спотворюють реальну морфологію У цей час не існує автоматичних методів визначення, чи включають зображення такі види артефактів, які утрудняють аналіз зображень судини або фізичного просвіту Характер сердечно-судинної функції загалом періодичний Визначення цієї періодичності і можливості встановити кореляцію між зображенням і часовою фазою серцевого циклу, до якого воно відноситься, називається кардюселекцієй У цей час кардюселекція виконується з використанням зовнішнього сигналу, звичайно ЕКГ (електрокардіограма) Однак ЕКГ-селекція вимагає як отримання ЕКГ-сигналу, так і його чергування (або синхронізації) з ІВУД-зображенням Це вимагає додаткового технічного і програмного забезпечення Морфологічні деталі в ІВУД-зображеннях кровоносних судин можна розділити на три основних категорії просвіт, тобто область, через яку тече кров або ІНШІ рідини організму, шари судини, зовнішня частина, тобто тканина або морфологія зовнішньої частини судини Кров в більшості ІВУДфільмів (зображень) видно у вигляді плямистого малюнка, що швидко змінюється Зовнішня частина судини також швидко видозмінюється у часі У сучасній апаратурі часова поведінка пікселів і їх текстурних елементів автоматично не контролюється Вазомоторна реакція в контексті фізичного просвіту, наприклад, кровоносної судини, характеризується як зміна калібру просвіту, тобто судини Ця зміна може бути викликана природними обста 57011 21 винами або штучно створеними умовами Вазомоторна реакція може мати динамічний компонент, тобто динамічна зміна розмірів просвіту, наприклад, калібру судини (стиснення і розширення) під час кардюваскулярного циклу, і базовий статичний компонент, тобто зміна базового калібру просвіту, тобто судини Вазомоторна реакція може бути виражена у вигляді КІЛЬКІСНИХ фізіологічних параметрів, що показують здатність просвіту, тобто судини, до зміни калібру в певних умовах Ці типи параметрів мають важливе медичне і діагностичне значення зараз і можливо, в майбутньому, для отримання інформації про стан просвіту, тобто судини, і дії лікування, що проводиться Технологія ІВУД може бути використана для контролю вазомоторної реакції, оскільки вона дає зображення базового калібру просвіту і його динамічні зміни Крім того, ІВУД можна використати для з'ясування, чи є вазомоторна реакція глобальною (рівномірної), тобто такою, коли весь поперечний перетин просвіту стискується/розширяється на одну і ту ж величину і в одному і тому ж напрямі ІВУД можна також використати для з'ясування, чи є вазомоторна реакція нерівномірна, ведуча до локальних змін калібру просвіту, тобто така, коли різні ДІЛЬНИЦІ поперечного перетину просвіту поводяться по-різному У цей час всі види контролю вазомоторних реакцій при допомозі ІВУД проводяться вручну Це стомлююча і трудомістка процедура, що не забезпечує спостереження за вазомоторними реакціями в реальному масштабі часу Інтерпретацію зображень ІВУД здійснюють шляхом аналізу масиву статичних зображень і контролю їх часової поведінки БІЛЬШІСТЬ зображень ІВУД можна розділити на три основні частини Внутрішня секція являє собою рідинний прохід просвіту, тобто порожнина, через яку тече рідина, тобто кров Навколо рідинного проходу розташована власне судина Це можуть бути кровоносні судини і будь-які ІНШІ судини організму, що складаються з декількох шарів тканини (і бляшок, у разі захворювання) Навколишню морфологію зовнгсудини може складати інша тканина, наприклад, серцева в зображенні коронарної судини Якщо ІВУД-плівка переглядається в русі, тобто у вигляді фільму, то пікселі, ВІДПОВІДНІ рідині, що протікає через судину, і морфології зовнішньої частини судини, показують іншу часову поведінку, ніж сама судина Наприклад, в більшості ІВУДфільмів кров, що протікає через судину, спостерігається у вигляді плямистого малюнка який видозмінюється з великою частотою Морфологія зовнішньої частини судини також показує часту видозміну У сучасній апаратурі часова поведінка пікселів в динамічних зображеннях ІВУД автоматично не контролюється У сучасних ІВУД-дисплеях, вбудованих в систему, високочастотні часові зміни придушуються, наприклад, за допомогою усереднення деякої КІЛЬКОСТІ зображень Однак ІНОДІ буває неможливо подавити зображення деталей з високими амплітудами, наприклад, яскраві сірі ВІДТІНКИ, І при цьому відбувається розмивання зображення Розмір просвіту рідинного проходу є дуже ва 22 жливим діагностичним параметром Якщо він необхідний для діагнозу, то він визначається вручну, наприклад, лікарем Це виконують шляхом проведення контура меж рідинного проходу, накладених на статичне зображення, наприклад, стоп-кадра відеоплівки або зображення на дисплеї апарату Такий спосіб ручного виділення трудомісткий, неточний і дає великі систематичні помилки У цей час існує серійно вироблюване програмне забезпечення обробки зображень для автоматичного виділення рідинного проходу Однак ці програми засновані на композиції сірих величин статичних зображень і не враховують іншої часової поведінки матеріалу, наприклад, крові, що протікає через прохід, відмінної від поведінки шарів судини При лікуванні судин звичайною практикою є повторне ІВУД-дослідження одних і тих же дільниць судини Наприклад, в типовій ситуації спочатку оглядають потрібну дільницю, оцінюють міру захворювання (якщо воно є), виймають ІВУДкатетер, розглядають варіанти лікування, виконують лікування, наприклад, введення РТСА-балона або стента, а відразу після цього повторне ІВУДдослідження обробленої ДІЛЬНИЦІ для оцінки результатів лікування Щоб правильно оцінити результати і повністю зрозуміти дію проведеного лікування, бажане порівняння зображень ДІЛЬНИЦІ судини до обробки і після обробки, що показують поперечний перетин судини в одному і тому ж МІСЦІ на осі Z (тобто ВІДПОВІДНИХ дільниць) Щоб виконати це порівняння, необхідно визначити, які місця на ПЛІВЦІ ІВУД-зображень до обробки і після обробки відповідають один одному Ця процедура, яку називають поєднанням (реєстрацією), забезпечує точне порівняння ІВУД-зображень до обробки і після обробки У цей час порівняння звичайно виконують шляхом перегляду ІВУД-плівок із зображеннями дільниць судини до і після обробки по черзі або паралельно, з використанням анатомічних орієнтирів, що ідентифікуються, щоб знайти ПОСЛІДОВНОСТІ, візуально ВІДПОВІДНІ один одному Цей спосіб надто неточний і важкий у використанні, оскільки зображення нестабільні і часто повертаються і/або переміщаються на екрані через відсутність стабілізації і внаслідок того, що багато які анатомічні орієнтири, знайдені в ІВУД-ПЛІВЦІ необробленої ДІЛЬНИЦІ, можуть бути порушені або змінені внаслідок проведеного лікування судини Крім того, орієнтація і вигляд судини також може змінюватися внаслідок різних орієнтацій і відносних положень ІВУД-катетера в судині, що міняються при його видаленні і повторному введенні після лікування Поєднання виробляють вручну і засновують головним чином на візуальній ідентифікації, яка надто трудомістка і неточна Резюме винаходу Даний винахід вирішує проблеми, пов'язані з сучасеими системами ІВУД-зображень і з колишньою технологією шляхом надання лікарям точних ІВУД-зображень і послідовностей зображень морфологічних дільниць, що досліджуються, забезпечуючи таким чином більш точний діагноз і розшифровку Даний винахід спрямовано на обробку ІВУД 23 зображення і інформацію сигналів з усуненням спотворень і неточностей, викликаних різними типами рухів як катетера, так і фізичного просвіту Це приводить до поліпшення якості і до підвищення ЦІННОСТІ ІВУД-зображень Перевага, що надається даним винаходом, полягає втому, що окремі ІВУД-зображення стабілізують відносно попереднього зображення (зображень), таким чином усуваючи негативні ефекти при будь-якій подальшій обробці множини зображень Якщо переміщення в кожному зображенні мають поперечний характер, то можлива повна компенсація рухів в кожному отриманому зображенні Даний винахід також забезпечує точне відтворення морфології алгоритмами об'ємної реконструкції, оскільки переміщення фізичного просвіту стабілізуються Даний винахід застосовний і корисний в будь-яких типах систем, які потребують стабілізації зображень (ІВУД або інших), де зонд (ультразвукової або іншої), рухомий через просвіт, зазнає відносних переміщень (тобто зонда і/або просвіту) Даний винахід забезпечує виявлення ультразвукового сигналу, що випромінюється ультразвуковим апаратом в фізичний просвіт, перетворення отриманого аналогового сигналу в полярні координати (А(г, Э), стабілізацію в полярному полі, перетворення стабілізованих полярних координат в Декартові координати (A(X,Y)), стабілізацію в декартовому полі і потім передачу стабілізованого зображення в декартових координатах на дисплей Стабілізовані зображення в полярних або в декартових координатах перед виведенням можуть пройти подальшу обробку або можуть не виводитися на дисплей Перетворення в декартові координати і/або стабілізація в декартовому полі може бути вироблена в будь-якій точці до або після стабілізації в полярному полі Крім того стабілізація в полярному або декартовому полі може не проводотись, в залежності від виявленого зрушення в зображенні і/або інших факторів Нарешті, можуть бути включені або виключені додаткові форми стабілізації, в залежності від виявленого зсуву і/або інших факторів Наприклад, може бути введена стабілізація жорсткого переміщення для компенсації обертального (кутового) руху або глобальної вазомоторної реакції (розширення або стиснення в радіальному напрямі) в полярному полі і/або для декартового переміщення (в напрямі X або Y) в декартовому полі Поперечне жорстке переміщення між послідовними зображеннями називається «зсувом», тобто рівномірним зміщенням всіх морфологічних деталей в площині зображення При стабілізації ІВУДзображень спочатку виконують етап «обчислення і знаходження зсув» Тобто обчислюють зсув і визначають його місцезнаходження (якщо він є) між кожною парою послідовних зображень Система може використати процесор для виконання над парою послідовних ІВУД-зображень операції по визначенню наявності зсуву між цими зображеннями Процесор може використати один алгоритм або може вибирати алгоритм з декількох алгоритмів здійснення такого визначення Система використовує алгоритм(и) моделю 57011 24 вання зсуву в зображенні і потім порівнює це здвинуте зображення із зображеннямпопередником Порівняння між зображеннями ВІДОМІ як операції подібності, які в колишній технологи могли також називатися поєднанням Система виконує одну операцію подібності для кожного зсуву Потім ОЦІНЮЮТЬСЯ результати ряду операцій подібності для визначення містознаходження (напряму і величин) здвинутого зображення, яке має найбільшу схожість з попереднім нездвинутим зображенням Зрозуміло, що таким же чином зображення може порівнюватися з подальшим зображенням Після визначення дійсного зсуву поточне зображення стає зображенням-попередником, і вищеописана операція повторюється Використовуючи етап підрахунок і знаходження зсуву, система визначає тип поперечного зсуву, тобто обертання, розширення, стиснення, зміщення (в декартовій системі) і т д , а також напрям і величину зсуву Наступний етап - «виконання зсуву» Це означає, що система виконує операцію або ряд операцій над послідовними ІВУДзображеннями по стабілізації кожного зображення відносно суміжного з ним попереднього зображення Ця стабілізація використовує один або множину «зворотних зсувів» з метою усунення виявленого зсуву Система може включати один алгоритм або може вибрати алгоритм з множини алгоритмів, що використовуються для виконання кожного «зворотного зсуву» Логіка, яка вибирає, який зворотний зсув повинен бути виконане в зображенні перед його передачею на подальшу обробку або на дисплей, називається «логікою зсуву» Після того як ІВУД-зображення стабілізовані відносно вибраних типів виявлених переміщень, система може передавати інформацію декартового (або полярного) зображення на подальшу обробку і зрештою на дисплей, де результати стабілізації можливо, наприклад, проглянені лікарем І навпаки, стабілізація може бути невидимою для користувача, в тому значенні, що стабілізація може провестися перед яким-небудь іншим етапом обробки, після якого результуючі зображення виводять на дисплей в їх початковому нестабілізованому стані або орієнтації Можливо, що поперечні переміщення між зображеннями не будуть жорсткими, а будуть мати локальний характер, тобто різні ДІЛЬНИЦІ зображення будуть містити переміщення в різних напрямах і з різними величинами У цьому випадку, з метою компенсації таких переміщень, вищеописані способи стабілізації можуть застосовуватися на локальній основі Даний винахід забезпечує виявлення періодичності серцевої ДІЯЛЬНОСТІ шляхом використання інформації, отриманої тільки з ІВУД-зображень, без необхідності у зовнішньому сигналі, такому як ЕКГ Ця процедура включає операції подібності, які також частково використовують в процедурі стабілізації Одна з найважливіших функцій виявлення періодичності (тобто кардюселекція), коли катетер нерухомий або коли виконується ІВУДвитягування, що контролюється, складається в тому, що ця процедура забезпечує вибір зображень, що належать до однієї і тієї ж фази в послідовних кардюциклах Вибір зображень на основі 25 57011 кардюселекцм дасть можливість стабілізації всіх типів періодичних переміщень (включаючи поперечні, вздовжні осі Z і кутові) за рахунок того, що зображення вибирають з однієї і тієї ж фази в послідовних ударах серця Ці ІВУД-зображення, наприклад, можуть виводитися на дисплей, а будьякі зазори, які утворяться між ними, можуть компенсуватися шляхом створення і виведення на дисплей інтерпольованих зображень ІВУДзображення, вибрані під час цієї операції, можуть також прямувати далі для подальшої обробки Операції подібності, що використовуються для виявлення періодичності, можуть також використовуватися для контролю якості зображення і виявлення артефактів, пов'язаних зі збоями у відтворюючій і обробляючій апаратурі Операції, що використовуються для підрахунку зсуву, можуть автоматично показувати "вазомоторні реакції Це може послужити стабілізаційним процесом, оскільки вазомоторна реакція приводить до ВІДМІННОСТІ послідовних зображень через зміну калібру судини Якщо зображення стабілізовані відносно вазомоторних реакцій, то ця зміна компенсується У альтернативному варіанті інформація, що стосується змін калібру, може виводитися на дисплей, оскільки вона може мати фізіологічне значення Контроль вазомоторних реакцій виконується шляхом застосування операцій подібності до послідовних зображень з використанням їх уявлення в полярних координатах, тобто А(г, Э) Ці операції можуть здійснюватися між цілими зображеннями або між ВІДПОВІДНИМИ окремими полярними векторами (з послідовних зображень), в залежності від бажаного вигляду інформації Оскільки глобальна вазомоторна реакція виражається як рівномірна зміна калібру судини, то вона може бути оцінена за допомогою операції подібності, яка враховує повне зображення в полярних координатах Загалом, для оцінки величини глобальної вазомоторної реакції може бути використана будьяка операція, застосовна для глобальної стабілізації в полярному уявленні У певних умовах при отриманні ІВУДзображень може виникати нерівномірна вазомоторна реакція, тобто рух лише на деяких дільницях ІВУД-зображення, ВІДПОВІДНИХ певним дільницям фізичного просвіту Це може "статися," наприклад, в тому МІСЦІ, де артерія містить бляшки, і тому розширення або стиснення артерії можливо тільки на дільницях, вільних від бляшок Коли таке переміщення виявлене, система може розділити ультразвукові сигнали, що представляють поперечні перетини фізичного просвіту, на множину сегментів, кожний з яких потім обробляється окремо в співвідношенні з ВІДПОВІДНИМ сегментом суміжного зображення, з використанням певного алгоритму (алгоритмів) Результуючі ІВУД-зображення можуть потім бути виведені на дисплей Ця форма стабілізації може бути використана індивідуально або в поєднанні з вищеописаними технологіями стабілізації У альтернативному варіанті інформація, що стосується локальних змін в калібрі судини, може виводитися на дисплей, оскільки вона може мати фізіологічне значення Часова поведінка пікселів і їх текстурних елементів може служити для поліпшення екранного 26 зображення і для автоматичної сегментації (виділень з просвіту) Якщо контроль зображення здійснюється зі стабілізацією, то характеристики процесу поліпшення екранного зображення і процесу сегментації можуть бути підвищені Згідно З даним винаходом, часова поведінка ІВУД-зображень може автоматично контролюватися Інформація, яку отримують за допомогою такого контролю, може бути використана для підвищення точності розшифровки ІВУД-зображень Шляхом фільтрації і придушення деталей, що швидко змінюються, таких як рідина, тобто кров, що протікає через судину, і морфологічних елементів зовні судини, з урахуванням їх часової поведінки, може бути поліпшене сприйняття судини людським оком на статичних і динамічних зображеннях, наприклад, що переглядаються у вигляді фільму Автоматична сегментація, тобто ідентифікація судини і речовини, тобто крові, що протікає через судину, може виконуватися з використанням алгоритму, який автоматично ідентифікує речовину, тобто кров, на основі часової поведінки текстурних елементів, утворених складаючими їх пікселями Часова поведінка, що виділяється з цих зображень, може використовуватися для декількох цілей Наприклад, часова фільтрація може здійснюватися для поліпшення зображення, а виявлення змін в текстурі пікселів може використовуватися для автоматичної ідентифікації просвіту і його оточення У ІВУД-зображеннях сам катетер (і відтворюючий прилад) повинен бути видалений із зображення до виконання стабілізації або перед проведенням контролю Якщо не видалити катетер, технологія стабілізації і контроль можуть бути порушені Видалення катетера може виконуватися автоматично, оскільки його розміри ВІДОМІ Даний винахід також забезпечує автоматичну ідентифікацію (тобто поєднання або реєстрацію) ВІДПОВІДНИХ кадрів двох різних плівок ІВУДвитягуваннь однієї і тієї ж ДІЛЬНИЦІ судини, наприклад, до лікування і після лікування Щоб порівняти першу плівку ІВУД-витягування, тобто першу ПОСЛІДОВНІСТЬ ІВУД-зображень, з другою плівкою ІВУД-витягування, тобто другою ПОСЛІДОВНІСТЮ ІВУД-зображень однієї і тієї ж ДІЛЬНИЦІ фізичного просвіту, наприклад, записаних на відеокасеті, КІНОПЛІВЦІ або в цифровій формі, ПОСЛІДОВНОСТІ зображень повинні бути синхронізовані Поєднання, яке забезпечує таку синхронізацію, включає операції подібності між групами послідовних зображень, що належать до двох комплектів послідовностей ІВУД-зображень З однієї ПОСЛІДОВНОСТІ зображень вибирають групу послідовних зображень, звану еталонною групою Ця група повинна бути вибрана з частини судини, яка показана в обох послідовностях зображень, і вона повинна бути тією частиною, на якій лікування не буде виконуватися, оскільки морфологія судини, ймовірно, зміниться після лікування Інша умова для цієї процедури поєднання складається в тому, що дві ПОСЛІДОВНОСТІ зображень отримують при ВІДОМІЙ, ПОСТІЙНІЙ і переважно однаковій швидкості витягування Операції подібності виконують між зображен 27 57011 нями еталонної групи і зображеннями з другої групи, яка містить таку ж КІЛЬКІСТЬ ПОСЛІДОВНИХ зображень, витягнутих з другої ПОСЛІДОВНОСТІ Потім ЦЮ другу групу зображень зсувають на один кадр відносно еталонної групи, і операцію подібності повторюють Це може повторюватися зазделепдь встановлену КІЛЬКІСТЬ разів, і результати операції подібності зрушення кожного кадру порівнюють для визначення максимальної подібності Максимальна подібність буде визначати зміщення кадру між зображеннями двох послідовностей Це зміщення можна повернути зворотно на першій або другій ПЛІВЦІ, щоб ВІДПОВІДНІ зображення могли бути автоматично ідентифіковані і/або переглянуті одночасно Таким чином, можна переглядати ВІДПОВІДНІ один одному зображення, наприклад, щоб визначити ефективність лікування, що проводиться, або зміни в морфології через деякий час Крім того, всередині зображень або між ними можуть бути проведені різні види стабілізації, описані вище, до, під час або після цих операцій поєднання Тому дві плівки можуть переглядатися не тільки в синхронізованому вигляді, але також і в однаковій орієнтації і положенні Короткий опис малюнків Ф і г 1 (а) і (Ь) показують двомірний масив або матрицю зображення, виражену в оцифрованих векторах, в полярних і декартових координатах, ВІДПОВІДНО Фіг 2 представляє результати підрахунків зсуву між двома послідовними зображеннями в декартових координатах Фіг 3 показує зображення, що ілюструють явище зносу в полярних і декартових координатах Фіг 4 показує результат виконання операцій стабілізації (зсуву у обертальній і декартовій системах) в зображенні Фіг 5 показує глобальне стиснення або розширення фізичного просвіту, в полярному представленні зображення і в декартовому представленні зображення Фіг 6 показує зображення, розділене на чотири секції для обробки по даному винаходу Фіг 7 показує судину, в декартових і полярних координатах, в якої виявлена вазомоторна реакція Фіг 8 показує результат контролю локальної вазомоторної реакції в реальній коронарній судині в графічній формі Фіг 9 показує графіки ЕКГ і коефіцієнт взаємної кореляції, побудовані синхронно Фіг 10 показує таблицю значень групи коефіцієнтів взаємної кореляції (середній рядок), що відносяться до послідовних зображень (номери 1-10 у верхньому рядку), і результати внутрішньої взаємної кореляції (нижній рядок) Фіг 11 показує графік коефіцієнта взаємної кореляції, вказуючий на артефакт в ІВУДзображеннях Фіг 12 показує ІВУД-зображення, розділені на три основних частини просвіт, через який протікає рідина, власне судина, навколишня тканина Фіг 13 представляє результати часової фільтрації Фіг 14 показує зображення результатів алгори 28 тму автоматичного виділення просвіту Фіг 15 показує часову ПОСЛІДОВНІСТЬ першої плівки (ліва колонка), еталонна дільниця з другої плівки (середня колонка) і зображення з першої плівки, відповідна (або суміщені) зображенням еталонної ДІЛЬНИЦІ (права колонка)) Докладний опис У штраваскулярних ультразвукових (ІВУД) системах відтворення ультразвукові сигнали випускаються і приймаються ультразвуковим приладом, таким як перетворювач або масив перетворювачів, обробляються і зрештою шикуються у вигляді векторів, що містять оцифровані дані Кожний вектор представляє ультразвуковий відгук окремого кутового сектора фізичного просвіту КІЛЬКІСТЬ Інформаційних елементів в кожному векторі (осьовий дискретний дозвіл) І КІЛЬКІСТЬ векторів, що використовуються для сканування поперечного перетину загалом (поперечний дискретний дозвіл) фізичного просвіту, залежить від конкретної системи, що використовується ІВУД Оцифровані вектори спочатку упаковують в двомірний масив або матрицю, показану на Фіг 1 (а) Звичайно ця матриця включає так звані полярні координати, тобто координати А(г, Э) Вісь X матриці, показаної на Фіг 1 (а), відповідає координаті г, а вісь Y - координаті Э Кожне значення матриці звичайно являє собою сіру величину, наприклад, в діапазоні 0-255, якщо це 8-бітова система, показуючи силу ультразвукового сигналу в цій ВІДПОВІДНІЙ ДІЛЬНИЦІ фізичного просвіту Ця полярна матриця може бути потім перетворена в декартову матрицю, як показано на Фіг 1 (Ь), що має осі X і Y, ВІДПОВІДНІ декартовскому представленню поперечного перетину судини Це зображення може бути потім оброблене і передане на дисплей Як початковий масив, так і екранне уявлення можуть використати полярні або декартові координати Значення матриці можуть відрізнятися від сірих величин, наприклад, вони можуть бути кольоровими або іншими величинами, а також можуть бути менше або більше 8 біт Під час процедури ІВУД-витягування фізичний просвіт, званий далі судиною, і/або відтворюючий катетер можуть зазнавати декількох типів відносного переміщення Ці ТИПИ переміщення включають (1) обертання в площині зображення, тобто зсуви по координаті Э полярного зображення, (2) декартове зміщення, тобто зсуви по координаті X і/або Y декартового зображення, (3) глобальна реакція, відмінна радіальним стисненням і розширенням судини загалом, тобто рівномірні зсуви по координаті г полярного зображення, (4) локальна вазомоторна реакція, відмінна радіальним стисненням і розширенням окремих частин судини з різними величинами і в різних напрямах, тобто локальні зсуви по координаті г полярного зображення, (5) локальне переміщення, відмінне переміщення різних тканин, яке змінюється в залежності від точного місцезнаходження всередині зображення, і (6) поперечні переміщення, тобто переміщення, перпендикулярні або близькі до перпендикуля 57011 ЗО 29 рних (кутових) до площини зображення у верхньому лівому квадранті матриці Величина і напрям зміщення центра судини позначені стрілСтабілізація послідовних рядів зображень закою Нижня матриця являє собою матрицю С (зсув стосовна до перших п'яти типів переміщень, опиX, зсув Y), яка є результуючою матрицею після саних вище, оскільки переміщення обмежується виконання підрахунок зсуву з використанням однопоперечною площиноюсудини Компенсація цих го з типів операції подібності переміщень і стабілізація зображень здійснюється шляхом трансформування кожного поточного зоІснує велика КІЛЬКІСТЬ різних алгоритмів або браження таким чином, що його схожість з попематематичних функцій, які можуть бути використареднім зображенням максимізується Перші три ні для виконання операцій подібності Одна з них типи переміщень можуть стабілізуватися з викоривзаємна кореляція, можливо, з використанням станням операцій подібності, які порівнюють зоперетворення Фурье Наприклад, поточне і попебраження або їх великі частини один з одним Це реднє зображення мають розмір 256x256 пікселів здійснюється за рахунок того, що ці переміщення кожне, і кожне з них трансформується з викорисза своєю природою є глобальними або жорсткими танням алгоритму швидкого перетворення" Фурье Четвертий і п'ятий типи переміщень стабілізуються (ШПФ) Сполучення по ШПФ поточного зображенз використанням операцій подібності на локальній ня множиться на ШПФ попереднього зображення основі, оскільки різні частини зображення зазнаРезультат зазнає зворотного перетворення з виють різних переміщень Переміщення шостого тикористанням зворотного перетворення Фурье пу лише частково можуть стабілізуватися з вико(ЗШПФ) Формула взаємної кореляції з викорисристанням операцій подібності на локальній танням перетворення Фурье може бути представоснові, оскільки переміщення не обмежується полена в наступному вигляді перечною площиною судини Цей тип переміщень С = дійсн (ошпф2((шпф2(А)) * сполуч може стабілізуватися з використанням методики (шпф2(В)))), виявлення кардюваскулярної періодичності Де Наступні розділи описують способи глобальної А - матриця попереднього зображення стабілізації, а потім способи, локальної стабіліза(256x256), ції Стабілізація з використанням методики виявВ - матриця поточного зображення (256x256), лення кардюваскулярної періодичності буде опишпф2 - двомірний ШПФ, сана в розділах, що описують виявлення ошпф2 - двомірний зворотне ШПФ, періодичності сполуч - сполучення, Щоб здійснити глобальну стабілізацію, проводійсн - дійсна частина комплексного виражендять підрахунок зсуву з використанням одного з ня, типів операції подібності Операція подібності ви* - множення елемента на елемент, і значає схожість між двома зображеннями ПідраС - матриця взаємної кореляції хунок зсуву виконують шляхом трансформації Оцінка подібності з використанням взаємної першого зображення і визначення його подібності, кореляції, що виконується перетворенням Фурье, тобто схожість з попереднім йому другим зобранасправді є наближенням, оскільки математична женням Трансформація може бути виконана, наформула перетворення Фурье відноситься до неприклад, шляхом зсуву усього першого зображенскінченних або періодичних функцій або матриць, ня вздовж осі або комбінації осей (X і/або Y в а в реальному житті матриці (або зображення) декартових координатах або г і/або Э в полярних мають кінцевий розмір і не обов'язково є періодичкоординатах) на один піксель (або більш) По заними При виконанні взаємної кореляції з викорисвершенні трансформації, тобто зсуву, трансфортанням ШПФ передбачається періодичність по моване перше зображення порівнюють з попереобох осях днім йому другим зображенням шляхом У результаті ця формула є хорошим набливикористання стандартної функції Цю трансфорженням і відображає дійсну картину по осі Э при мацію повторюють, кожний раз зсуваючи перше представленні зображення в полярних координазображення на додатковий піксель (або більш) тах, однак не відображає дійсної картини по осі г в вздовж тієї ж і/або іншої осі, і трансформоване полярних координатах або по осях X або Y при зображення порівнюють з попереднім другим зопредставленні зображення в декартових коордибраженням шляхом використання стандартної натах функції Після підрахунку всіх зсувів місцеполоВиконання взаємної кореляції з використанням ження глобального екстремума порівнянь, провеШПФ має деякі переваги По-перше, всі значення дених з використанням стандартної функції, буде взаємно-кореляційної С(зсув X, зсув Y) розрахоозначати напрям і величину зміщення між першим вуються за допомогою цієї базової операції Крім зображенням і попереднім йому другим зображентого, є спеціалізоване технічне забезпечення для ням ефективного виконання операції ШПФ, тобто мікросхеми або плати цифрової обробки сигналів для Наприклад, Фіг 2 представляє результати підперетворення Фурье рахунку зсуву між двома послідовними зображеннями в декартових координатах Зображення А Інший алгоритм, який можна використати для це зображення-попередник, що показує картину, виконання операції подібності - позитивна взаємна тобто поперечний перетин судини, центр якого кореляція, нормалізована або не нормалізована розташований в нижньому правому квадранті матВона досягається шляхом множення кожного пікриці Зображення селя в поточному здвинутому зображенні на ВІДПОВІДНИЙ піксель в попередньому зображенні, підВ - це поточне зображення, що показує ту ж сумовування всіх результатів і нормалізації у разі картину, але зміщену вгору і ліворуч і розташовану 57011 32 31 нормалізованої взаємної кореляції Кожний зсув орі не може бути виділена як така, що дає кращі виражається у вигляді суми, а дійсний зсув буде або найбільш точні результати Крім того, існують представлений найбільшою сумою з всіх обчислечисленні різновиди вищеописаних формул і ІНШІ них зсувів Формула взаємної кореляції може бути алгоритми/формула, які можуть бути використані представлена в наступному вигляді для виконання підрахунку зсуву і які можуть заміС(зсув X, зсув Y) = 2 В(х - зсувХ, у - зсувУ) * (А(х, у) нювати вищеописані алгоритм/формули Ці алгоритм/формули також включають операції, ВІДОМІ В х,у КОЛИШНІЙ технології як операції поєднання Розглянемо знов Фіг 2 Якщо операція подібФормула для нормалізованої взаємної кореності виконується у вигляді взаємної кореляції, то ляції матриця С(зсув X, зсув Y) називається взаємнокореляційною матрицею, а її глобальний максимум (позначений чорною точкою у верхньому ліA - матриця попереднього зображення, вому квадранті) буде знаходитися на деякій відВ - матриця поточного зображення, стані і в деякому напрямі від центра матриці * - множення пікселя на ВІДПОВІДНИЙ піксель, (стрілка в матриці С), ВІДПОВІДНИХ напряму і відІ - сума всіх пікселів в матриці, стані від центра судини в зображенні В відносно С - матриця, що містить результати для всіх центра судини в зображенні А (стрілка в зобравиконаних зсувів женні В) Використовуючи цей позитивний метод взаємЯкщо операція подібності виконується у виної кореляції, можна обчислити значення С(зсув X, гляді САР, то чорна точка буде означати глобальзсув Y) для всіх можливих величин зсув X і зсув Y ний мінімум, який буде знаходитися на деякій відНаприклад, якщо кожна з початкових матриць, А і стані і в деякому напрямі від центра матриці В, має розмір 256x256 пікселів, то доведеться об(стрілка в матриці С), ВІДПОВІДНИХ напряму і відчислювати всі значення зсув X і зсув Y, кожну в стані від центра судини в зображенні В відносно діапазоні від -127 до +128, зробивши загальну КІцентра судини в зображенні А (стрілка в зобраЛЬКІСТЬ обчислень зсувів 256x256 = 65536, щоб женні В) розрахувати матрицю С(зсув X, зсув Y) для всіх Обертальне переміщення виражається як зсув можливих величин зсув X і зсув Y По закінченні поточного полярного зображення відносно попецих обчислень визначається глобальний максиреднього зображення по І-координаті Обертальмум матриці ний зсув в поточному зображенні виявляється Позитивна взаємна кореляція може бути викошляхом максимізацм подібності між поточним понана більш ефективно шляхом зменшення КІЛЬКОлярним зображенням і його попередником МаксиСТІ необхідних арифметичних операцій Щоб вимальна подібність буде отримана при зворотному явити дійсний зсув між зображеннями, підрахунок зсуві поточного зображення на точну величину кожного можливого зсуву по осі X і по осі У не є дійсного зсуву Наприклад, в зображенні розміром обов'язковим Досить знайти місцезнаходження 256x256 пікселів різниця (в пікселях) між 128 і 9 максимального С(зсув X, зсув Y) з всіх можливих координатою максимума у взаємно-корелірованом значень зсув X і зсув Y зображенні (мінімум в САР-зображенні) буде ознаТретій алгоритм, який може бути використаний чати напрям (позитивне або негативне) і величину для виконання операцій подібності - алгоритм суобертання ми абсолютних різниць (CAP) Ця сума виходить Глобальна вазомоторна реакція відрізняється шляхом віднімання кожного пікселя на одному розширенням і стисненням усього поперечного зображенні з ВІДПОВІДНОГО йому пікселя на іншому перетину судини У полярному зображенні цей тип зображенні, взяття їх абсолютних величин і підсупереміщень виражається як рух всередину і назомовування всіх результатів Кожний зсув виражевні судини вздовж г-осі Вазомоторна реакція може ний у вигляді суми, а дійсний зсув буде представкомпенсуватися шляхом виконання протилежного лений найменшою сумою Формула суми вазомоторного переміщення на поточному полярабсолютних різниць (CAP) може бути представленому зображенні відносно попереднього полярнона в наступному вигляді го зображення з використанням однієї з вищеопиСАР = абс(АВ) саних формул або якоі-небудь іншої формули На Ця формула може бути також представлена в відміну від кутової стабілізації, стабілізація вазонаступному вигляді моторних реакцій не змінює орієнтації зображення, С(зсув X, зсув Y) = ^ abcB(x - зсувХ, у - зсувУ) - (А(х, у) а фактично трансформує зображення шляхом х.у розтягання або стиснення його Декартове зміщення виражається як зсув по Де осі X і/або по осі Y в декартовому зображенні відА - матриця попереднього зображення, носно його попередника Цей тип переміщень усуВ - матриця поточного зображення, вається шляхом зсуву декартового зображення в абс - абсолютна величина, напрямі, протилежному дійсному зсуву Таким чи- - віднімання елемента з елемента, ном, зміщення в декартових координатах може І - сума всіх різниць бути отримане, в суті, за допомогою тих же арифОскільки ТОЧНІСТЬ КОЖНОГО З ЦИХ алгоритмів метичних операцій, які використовуються для стаможе злегка змінюватися в залежності від конкребілізації обертальних і вазомоторних зміщень в тного типу переміщень, що є, і установок системи, полярному уявленні зрозуміло, що жодна окремо взята формула апріКІЛЬКІСТЬ обчислень зсуву, необхідне для ви 33 57011 значення глобального екстремума (максимума або мінімуму, в залежності від функції подібності) матриці С(зсув X, зсув Y) може бути зменшено за допомогою використання різних обчислювальних прийомів Один з прийомів, наприклад, використовує перевагу того факту, що зміщення між послідовними ІВУД-зображеннями, як правило, малі відносно всього розміру полярних і/або декартових матриць Це означає, що значення С(зсув X, зсув Y) можуть обчислюватися лише у відносно невеликій частини матриці навколо її центра, тобто навколо зсув Х=0, зсув Y=0 Екстремум цієї частини приймається за глобальний екстремум матриці С(зсув X, зсув Y), що включає більш високі значення зсув X і зсув Y Розмір мінімальної частини, що гарантує, що виявлений всередині неї екстремум дійсно є глобальним екстремумом, змінюється в залежності від установок, системи Число необхідних операцій підрахунків додатково може бути зменшене на основі очікування плавності і монотонності матриці С (особливо поблизу глобального екстремума) Тому, якщо в певному МІСЦІ матриці значення С(зсув X, зсув Y) являє собою локальний екстремум (наприклад, в околиці 5x5 пікселів), то, ймовірно, він є глобальним екстремумом всієї матриці С(зсув X, зсув Y) Це зменшення числа необхідних операцій підрахунків може виконуватися починаючи пошук від центра матриці(зсув Х"0, зсув Y=0) з перевіркою малої околиці, наприклад, 5x5 пікселів навколо центра Якщо локальний екстремум знаходиться всередині цієї околиці то, ймовірно, він є глобальним екстремумом всієї матриці С(зсув X, зсув Y), і пошук може бути припинений Якщо, однак, локальний екстремум знаходиться на межах цієї околиці, наприклад, зсув Х=-2, зсув Х=2, зсув Y=-2 або зсув Y=2, то пошук повторюється навколо цього пікселя, поки не буде знайдене значення С(зсув X, зсув Y), більше (або менше), ніж його найближчі сусіди Оскільки В більшості зображень відсутні взаємні зміщення між зображеннями, то КІЛЬКІСТЬ обчислень, необхідне для визначення глобального екстремума в цих випадках, буде становити приблизно 5x5 = 25, замість початкових 65 536 обчислень Число необхідних операцій підрахунків може також знижуватися шляхом вибору дискретних даних в зображенні Наприклад, якщо в зображеннях розміром 256x256 розглядати кожний другий піксель, то вони меншають до матриць розміром 128x128 У цьому випадку позитивна взаємна кореляція або CAP між такими матрицями включає 128x128 операцій замість 256x256, при кожному зсуві зображень відносно один одного Вибір дискретних даних, як спосіб зменшення операцій підрахунку зсуву, може чергуватися з іншими вищеописаними способами зменшення Повернемося знов до Фіг 2 Внаслідок операції подібності вказаний зсув X буде мати позитивну величину, а зсув Y негативну величину Щоб стабілізувати зображення В, тобто компенсувати зсуви в напрямах X і Y, логіка зсуву буде реверсувати зсуви, тобто змінювати їх знаки, але не величину, і здійснювати ці зсуви в матриці, ВІДПОВІДНІЙ зображенню В Це штучно переміщує зсув в зображенні В в зворотну сторону і робить зображення В незд 34 винутим відносно зображення А ДІЙСНІ значення, що використовуються в обчисленнях подібності, не обов'язково повинні бутипочатковими значеннями матриці, що надаються системою відтворення Наприклад, можуть бути отримані поліпшені результати, якщо піднести початкові значення до 2, 3 або 4 степеня або обробити деякими іншими методами Відтворюючий катетер і навколишня його оболонка представляють у всіх ІВУД-зображеннях ПОСТІЙНІ артефакти Ця деталь утрудняє виконання операцій подібності, що виконуються між зображеннями, оскільки вона не є частиною морфологією судини Тому перед виконанням операцій подібності необхідно видалити катетер і пов'язані з ним об'єкти з кожного зображення, тобто привласнити його пікселям нульове значення Видалення цих об'єктів із зображення може виконуватися автоматично, оскільки розміри катетера ВІДОМІ Підрахунок і виконання зсуву можуть бути модульними операціями Так, підрахунок і виконання зсуву може обмежуватися тільки полярними координатами або тільки декартовими координатами, або ж підрахунок і виконання зсуву може виконуватися послідовно для полярних і декартових координат У цей час, оскільки відтворення в ІВУДсистемах в основному організується за рахунок використання спочатку полярних координат, а потім перетворення в декартові координати, зручніше усього виконувати підрахунок І виконання зсув в такій же ПОСЛІДОВНОСТІ Однак ПОСЛІДОВНІСТЬ мо же бути модифікована або змінена без якихнебудь негативних впливів або результатів Процес підрахунку зсуву може виконуватися по одній або двом осям У основному віддається перевага двомірному підрахунку зсуву, навіть якщо зміщення направлене вздовж однієї осі Виконання зсуву може бути зроблене по обох осях, по одній осі або ні по одній осі Область зображення, яка використовується для підрахунку зсуву, і область, в якій зсув виконується, не обов'язково повинні бути тотожні Наприклад, підрахунок зсуву може виконуватися з використанням відносно малої області зображення, а операція виконання зсуву буде зсувати все зображення згідно із зсувом, вказаним цією областю Тривіальна логіка зсуву це така логіка, по якій зсув, що виконується на кожному зображенні (і формує таким чином стабілізоване зображення), має величину, рівну і протилежну у напрямі обчисленому зсуву Однак така логіка може привести до процесу, званого зносом Знос це процес, при якому виконані зсуви нагромаджуються і утворять зростаючий зсув, розміри якого значущі відносно зображення загалом або екрана Знос може бути результатом неточного підрахунку зсувів або непоперечного взаємнопереміщення зображень на деяких дільницях кардюваскулярного циклу При виконанні стабілізації в декартових координатах знос може викликати, наприклад, зміщення з екрана дисплея відносно великої частини зображення При виконанні обертальної стабілізації знос може викликати збільшення повороту зображення в певному напрямі Фіг 3 показує зображення, що ілюструють явище зносу в полярних і декартових координатах 35 Ліве зображення являє собою початковий вигляд зображення, а праве зображення те ж зображення після виконання полярної і декартової стабілізації Потрібно помітити, що праве зображення повернене на великий кут проти годинникової стрілка і здвинуте вниз відносно лівого зображення У цьому випадку виконання зсуву у обертальних і прямокутних координатах не компенсує ДІЙСНІ зсуви в зображенні, а, швидше усього, з'являється через неточний підрахунок зсуву Логіка зсуву повинна бути здатною справлятися з таким зносом настільки, щоб здійснювалося мінімальне виконання помилково обчислених зсувів Один з способів запобігання або, принаймні, обмеження зносу складається в установці граничної величини допустимих зсувів Це мінімізує знос, але за рахунок некомпенсацм деяких дійсних зсувів Для запобігання або мінімізації зносу можуть бути використані додаткові способи Вони можуть також чергуватися з розглянутими далі способами виявлення кардюваскулярної періодичності Зображення, показані на Фіг 4, ілюструють результат виконання операцій стабілізації (обертального і декартового зсуву) на зображенні Ліве зображення являє собою ІВУД-зображення коронарної артерії, як вона виглядає на великій частині звичайного дисплея (зі стертим катетером), а праве зображення показує, як буде виглядати ліве зображення після виконання операцій стабілізації При уважному розгляді у лівого і правого зображень на Фіг 4 можна помітити певні ВІДМІННОСТІ По-перше, праве зображення злегка повернене за годинниковою стрілкою (на декілька градусів) відносно лівого зображення Це результат обертальної стабілізації Далі, праве зображення перенесене ліворуч відносно лівого зображення Це можна виявити, вимірявши відстань від просвіту (порожнини) до краю картинки на кожному зображенні Це результат операцій декартової стабілізації зсуву Переваги стабілізації екранного зображення неможливо оцінити, розглядаючи окремі зображення, показані на Фіг 4 Однак перегляд КІНОПЛІВКИ таких зображень цілком ілюструє ці переваги На екрані, що не включає стабілізацію, катетер завжди буде знаходитися в центрі екрана, а морфологічні деталі на екрані будуть рухатися і обертатися І навпаки, на стабілізованому екрані катетер буде переміщатися, а морфологічні деталі будуть залишатися в основному нерухомими Стабілізація не обов'язково повинна виявлятися на реальному екрані Вона може бути невидимою для користувача в тому значенні, що стабілізацію можна виконувати перед яким-небудь іншим етапом обробки, після якого результуючі зображення виводять на дисплей в їх початковому (нестабілізованому) стані або орієнтації Фіг 5 показує глобальне стиснення або розширення фізичного просвіту, виражене в полярному представленні зображення, як зміщення деталей по координаті г, тобто зміщення по полярних векторах Фіг 5 також показує це ж глобальне стиснення або розширення, виражене в декартовому представленні зображення Фіг5(а) показує початковий вигляд поперечного перетину судини в полярному і декартовому представленнях Фіг5(Ь) 57011 36 показує стиснення судини відносно початкового стану Фіг5(с) показує рівномірне розширення судини відносно початкового стану Оскільки вазомоторна реакція виражається як рівномірна зміна калібру судини, то для оцінки величини глобальної вазомоторної реакції може бути використана будь-яка операція, застосовна для стабілізації в полярному уявленні, наприклад, вона може бути оцінена за допомогою операції подібності, що використовує ціле полярне зображення Після виконання вищеописаного підрахунку двомірного зсуву використовується знаходження максимума матриці С(зсув X, зсув Y) по осі ( для обертальної стабілізації При цьому залишається місцезнаходження екстремума на осі г, яке може бути використане як ознака глобальної вазомоторної реакції Таким чином, контроль глобальної вазомоторної реакції є побічним продуктом операції підрахунку двомірного зсуву в полярному зображенні Кожна пара послідовних зображень створює показову величину вазомоторної реакції Величина і знак результуючого зсуву між зображеннями характеризує зміну в судині, тобто вазомоторну реакцію Негативні зсуви означають розширення, а позитивні розширення Чисельна величина показує розмір вазомоторної зміни У певних умовах переміщення або вазомоторні реакції можуть не бути рівномірними/жорсткими, хоч і обмеженими площиною зображення, тобто поперечною площиною Щоб визначити тип переміщення або вазомоторної реакції, зображення можна розділити на секції і в кожній з цих секцій виконати підрахунок для глобальної стабілізації Досліджуючи вказані зсуви в цих секціях відносно ВІДПОВІДНИХ секцій в попередньому зображенні, можна визначити тип переміщення Наприклад, як показано на Фіг 6, зображення на Фігб(а) можна розділити на чотири секції, як показано на Фіг 6(Ь) Підрахунок зсуву може виконуватися окремо на кожній з чотирьох секцій Порівняння між результатами підрахунку зсуву для кожної з чотирьох секцій може ідентифікувати тип дійсного переміщення Таким чином, тип стабілізації, що застосовується, може змінюватися в залежності від типу виявленого переміщення Стабілізація локального переміщення здійснюється за рахунок виконання операцій подібності на локальній основі У локальному процесі стабілізації беруть участь малі ДІЛЬНИЦІ попереднього зображення А («шаблонні» ДІЛЬНИЦІ) І малі ДІЛЬНИЦІ поточного зображення В («шукані» ДІЛЬНИЦІ) ІНОДІ краще виконувати локальну стабілізацію після виконання глобальної стабілізації Під час локальної стабілізації шаблонні ДІЛЬНИЦІ попереднього зображення (А) зсуваються в межах шуканих дільниць і порівнюються з використанням операцій подібності, з дільницями шаблонних розмірів в поточному зображенні (В) Кожному піксел ю в (новому) створеному стабілізованому зображенні (В') привласнюється нове значення на основі результатів пошуку і, підрахунку подібності Локальна стабілізація показана в наступному прикладі, в якому шаблонна дільниця являє собою 37 дільницю розміром 1x1 піксель, тобто одиночний піксель, шукана дільниця являє собою дільницю розміром 3x3 пікселя, а операція подібності виконується методом САР У наступній схемі піксель зі значенням 3 в зображенні А і піксель зі значенням 9 в зображенні В є ВІДПОВІДНИМИ пікселями Також показана окресність 3x3 пікселя зі значенням 9 Піксель в А ,-, ,-. ,„ о , _ Піксель в В (3x3 «шука.-., («шаблонна • . В v , на дільниця») дільниця») I 1010 З 7 9 50 1 II 7 60 У цьому прикладі, ВІДПОВІДНО ДО описаних вище умов, «шаблонний» піксель зі значенням 3 порівнюється, шляхом використання CAP, з всіма пікселями, що знаходяться в шуканій ДІЛЬНИЦІ 3X3 навколо пікселя зі значенням 9 Піксель зі значенням 1 у верхньому лівому кутку шуканої ДІЛЬНИЦІ при ОЦІНЦІ методом CAP досягне мінімального значення (|1-3|=2) з всіх можливих значень в шуканій ДІЛЬНИЦІ У результаті в новому стабілізованому зображенні (В') пікселю, відповідному по розташуванню пікселям зі значеннями 3 і 9, буде привласнене значення 1 У принципі, розміри шаблонної і шуканої дільниць подібності можуть змінюватися нарівні з операціями подібності, що використовуються Дійсне значення, що привласнюється пікселю знову створеного стабілізованого зображення (В'), не обов'язково повинне бути дійсним значенням пікселя з поточного зображення В (як показано в прикладі), а може бути деякою функцією значень пікселів Важливо ВІДМІТИТИ, що внаслідок локальної стабілізації, на відміну від глобальних/жорстких методів, «композиція» зображення, тобто внутрішні взаємостосунки між пікселями і їх розподіл в стабілізованому зображенні, змінюється відносно початкового зображення Локальна стабілізація може виконуватися як в полярному, так і в декартовому представленні зображення Фіг 7 показує судину, в декартових і в полярних координатах, в якої виявлена локальна вазомоторна реакція Коли виявляється вазомоторна реакція, є та ознака, що поведінка одних частин поперечного перетину судини відрізняється від поведінки інших частин поперечного перетину Фіг7(а) показує початковий вигляд судини до вазомоторної реакції Фіг 7(Ь) показує приклад локальної вазомоторної реакції Як вказано на обох уявленнях, декартовому і полярному, чотири ВІДМІТНІ частини судини поводяться по-різному два сектори судини не змінюють калібр, або не переміщаються відносно ВІДПОВІДНИХ ним секторів попереднього зображення, один сектор стискується, або переміщається вгору, а один сектор розширяється, або переміщається вниз Як можна помітити, методи оцінки глобальної вазомоторної реакції не підходять для оцінки локальної вазомоторної реакції через нерівномірну поведінку судини Якщо застосувати оцінку глобальної вазомоторної реакції, наприклад, до зображення, показаного на Фіг 7, в результаті вийде нульова загальна вазомоторна реакція, тобто розширення і стиснення знищать один одне Отже, повинні використовуватися методи оцін 57011 38 ки локальної вазомоторної реакції Ця оцінка здійснюється шляхом окремої оцінки вазомоторної реакції в кожному полярному векторі, тобто в кожному векторі Э (або Y) Операції подібності виконуються з використанням одномірних зсувів у ВІДПОВІДНИХ полярних векторах Наприклад, якщо операція подібності виконується з використанням взаємної кореляції, то наступна формула ілюструє, як це виконується з використанням одномірних зсувів С(зсув X, Y) = 2 В(х - зсувХ, у) * (А(х, у) х Де А - матриця попереднього зображення, В - матриця поточного зображення, * - множення пікселя на ВІДПОВІДНИЙ піксель, І - сума пікселів в матриці полярного вектора, С - двомірна матриця коефіцієнта кореляції Таким чином, зсув виконується вздовж однієї осі (X або г) для кожного полярного вектора (вектора Э або Y) Значення, задані в кожному векторі для оцінки зсуву, можуть не бути дійсними значеннями зображень, а, наприклад, кожному пікселю у векторі може бути привласнена середня величина із значень його бічних сусідів, наприклад, А(Х, Y) середнє значення з А(Х, Y-1), A(X, Y) і А(Х, Y+1) Те ж справедливо для В(зсув X, Y) Це робить процес взаємної кореляції більш стійким до перешкод Формується двомірна матриця (С(зсув X, Y)) Кожна колонка в цій матриці містить результати операцій подібності/схожості, виконаних між ВІДПОВІДНИМИ полярними векторами з поточного зображення і попереднього зображення Ця операція може також виконуватися з використанням ШПФ Після формування матриці визначається місцезнаходження екстремума (максимума в операції взаємної кореляції) в кожній колонці Це місцезнаходження екстремума вказує на поєднання поточного полярного вектора з його попередником Таким чином, в кожному векторі оцінюється вазомоторна реакція, тобто радіальне зміщення в кожному окремому кутовому секторі судини Ці результати можна використати для виведення на дисплей локальної вазомоторної реакції, можна підсумовувати результати, взяті з декількох або всіх полярних векторів, і набути середнього значення, щоб визначити величину вазомоторної реакції, або можна використати цю інформацію для інших цілей Тому шляхом оцінки локальної вазомоторної реакції можна оцінювати величину як локальної, так і глобальної вазомоторної реакції Для ефективного використання і/або вираження у вигляді КІЛЬКІСНИХ фізіологічних параметрів, величина вазомоторної реакції повинна певним чином СПІВВІДНОСИТИСЯ з дійсним калібром судини Тобто контрольні вимірювання вазомоторної реакції загалом повинні використовуватися в поєднанні з автоматичними або ручними вимірюваннями калібру судини Крім визначення дійсної вазомоторної реакції, за вазомоторну реакцію може бути прийнято декартове зміщення Це відбувається тому, що декартове зміщення, виражене в полярних координатах, в результаті дає зсув по обох осях г і Э Щоб відрі 39 знити дійсну вазомоторну реакцію від декартового зміщення, підрахунок зсуву в декартовому зображенні не повинен показувати зміщення, або може показувати мале зміщення Якщо виявлено декартове зміщення, то воно повинне бути стабілізоване насамперед Після цього декартові координати можна перетворити зворотно в полярні для оцінки вазомоторної реакції Це забезпечить більш точні результати визначення вазомоторної реакції Графіки на Фіг 8 представляють результати контролю локальної вазомоторної реакції в людській коронарній судині in vivo Контроль вазомоторної реакції виконувався ДВІЧІ, приблизно в одній і тій же ДІЛЬНИЦІ судини, і складався з 190 послідовних зображень, як показано (на осі X) на Фіг8(а) і 8(Ь) ВІДМІННІСТЬ МІЖ двома графіками складається в тому, що оцінка вазомоторної реакції, показана на Фіг 8(а), виконувалася до лікування артерії, тобто до втручання, а оцінка вазомоторної реакції, показана на Фіг 8(Ь), виконувалася після лікування артерії, тобто після втручання У кожному зображенні вазомоторна реакція оцінювалася локально в кожному полярному векторі, а потім всі виявлені індивідуальні зсуви складалися і усереднювалися з отриманням одного показника глобальної вазомоторної реакції (на осі Y) для кожного зображення, тобто показника вазомоторної активності Цифри на осі Y не мають прямого фізіологічного значення, оскільки дійсний калібр судини не розраховувався, але співвідношення між величинами в Фіг8(а) і 8(Ь) мають значення, оскільки вони отримані з однієї і тієї ж судини Таким чином, з цих малюнків можна витягнути важливу інформацію Зверніть увагу, як збільшилася вазомоторна реакція після лікування (максимальна вазомоторна реакція збільшилася з 40 до 150) Тому, хоч і не була зроблена повна кількісна оцінка вазомоторної реакції, була продемонстрована зміна в фізіологи (ймовірно, пов'язане з лікуванням) Контроль кардюваскулярної періодичності може здійснюватися на основі однієї лише інформації, що міститься в ІВУД-зображеннях, і таким чином усувається необхідність в ЕКГ або в будьякому іншому зовнішньому сигналі Це означає, що може бути встановлений зв'язок між кожним зображенням і його ВІДПОВІДНОЮ часовою фазою в кардюваскулярном циклі без необхідності у зовнішньому сигналі Після ТОГО ЯК ЗВ'ЯЗОК встановлено, такий контроль може замінити ЕКГ-сигнал у великій КІЛЬКОСТІ програм, що вимагають кардюселекцію Цей контроль може здійснюватися з використанням операцій подібності між послідовними зображеннями Більш того, ті ж операції подібності можуть забезпечувати інформацію про якість ІВУД-зображень і їх поведінку Кардюцикл позначається на ЦИКЛІЧНІЙ поведінці деяких параметрів, які розраховуються з ІВУДзображень Якщо здійснюється контроль поведінки цих параметрів, то можна визначити періодичність кардюцикла Знаючи швидкість отримання кадрів, також можна визначити кардюваскулярний цикл як часову величину Подібність між послідовними ІВУДзображеннями - параметр, який показує явну періодичну поведінку Це результат періодичності бі 57011 40 льшості типів взаємопереміщення між зображеннями Можна отримати функцію подібності, в якій кожне значення є результатом операції подібності між парою Послідовних зображень Наприклад, набір з десяти зображень дасть дев'ять послідовних значень подібності Функція подібності може бути отримана з операції взаємно-кореляційного типу, операції CAP або будь-якого іншого типу операції, яка надає такий тип функції Для контролю періодичності дуже хороші результати дає нормалізована взаємна кореляція Наступна формула являє собою формулу для коефіцієнта взаємної кореляції (як функції N-ro зображення) для розрахунку функції подібності Кореляційна функція(И) = УВ(х,у)*А(х,у)/ ДЄ Кореляційна_функція(І\І) - одномірна функція, що дає одне значення для кожної пари зображень, А - матриця попереднього зображення (N-ro зображення) В - матриця поточного зображення (N+1- го зображення) * - множення пікселя на ВІДПОВІДНИЙ піксель, І - сума всіх пікселів в матриці Коефіцієнт кореляції є побічним продуктом процесу стабілізації, оскільки завжди обчислюється центральне значення (зсув Х=0, зсув Y=0) нормалізованої взаємно-кореляційної матриці (С(зсув X, зсув Y)) Це справедливе для всіх типів функцій подібності, що використовуються для стабілізації Центральне значення матриці подібності (С(зсув Х=0, зсув Y=0)), з взаємної кореляції або операції іншого типу, що використовується для стабілізації, завжди можна використати для отримання функції подібності Функція подібності може бути також обчислена із зображень, здвинутих відносно один одного, тобто величина, що використовується для отримання функції, являє собою С(зсув X, зсув Y), де зсув X і зсув Y не рівні нулю Функція подібності не обов'язково виводиться з цілих зображень, а може бути розрахована з частин зображень, ВІДПОВІДНИХ один одному або здвинутих відносно один одного Фіг 9 показує графіки ЕКГ і коефіцієнт взаємної кореляції, побудовані синхронно Обидві криві відносяться до одного і того ж комплекту зображень Фіг 9(а) показує графік ЕКГ-сигналу, а Фіг9(Ь) показує графік коефіцієнта взаємної кореляції, отриманого з послідовних ІВУД-зображень На горизонтальній осі показані номери зображень (загальною КІЛЬКІСТЮ 190 послідовних зображень) Як видно з малюнка, функція коефіцієнта взаємної кореляції на Фіг 9 має періодичний характер, а періодичність його така ж, як періодичність сигналу ЕКГ на Фіг9(а) (обидва графіки показують біля 6 ударів серця) Контроль періодичності функції подібності може бути складним, оскільки функція подібності не має типової форми, вона може змінюватися згодом, залежить від типу функції подібності, що використовується, і крім того, вона може змінюватися від однієї ДІЛЬНИЦІ судини до іншої і від об'єкта до об'єкта 57011 42 41 Для здійснення безперервного і автоматичного величин подібності зображень, що отримуються в контролю періодичності функції подібності можуть майбутній час Таким чином, на відміну від порогозастосовуватися різні методи Один з методів, навого методу, метод подібності вимагає зберігання приклад, метод порогового типу ВІДПОВІДНО ДО зображень (в пам'яті), а виявлення періодичності цього методу, контролюється перевищення функпроводиться ретроспективно Періодичність карцією подібності деякої величини, відомою як породюцикла може також визначатися шляхом трансгове значення Після виявлення цієї величини споформації кривої подібності в область часової часстереження продовжується до наступного тоти за допомогою перетворення Фурье У перетину порога Визначається період, як різниця частотній області періодичність повинна виражау часі між перетинами порога Приклад виконання тися ВІДПОВІДНИМ піком Цей пік може бути виявлетакої методики показаний на Фіг 10 у вигляді табний за допомогою спектрального аналізу лиці Таблиця представляє групу значень коефіціФункція подібності може надати додаткову ваєнта взаємної кореляції (середній рядок), що віджливу інформацію відносно ІВУД-зображень, яка носяться до послідовних зображень (номери 1-10 не може бути отримана за допомогою ЗОВНІШНІХ у верхньому рядку) Якщо поріг, наприклад, встасигналів, наприклад, ЕКГ, які не виходять з дійсних новлений на величину 0,885, то цей поріг уперше зображень Поведінка цієї функції може вказувати перетинається при переході від зображення №2 на певні стани в ІВУД-зображеннях або частинах до зображення №3 У другий раз поріг перетиназображень, що використовуються для отримання ється при переході від зображення №6 до зобрафункції подібності Важливі характеристики функження №7 Таким чином, інтервал періодичності ції подібності, які є показниками станів ІВУДрівний часу, що зажадався для отримання 7-3=4 зображень, ця наявність періодичності і «нерівносзображення ті» функції подібності Нормальні ІВУД-зображення повинні показувати відносно плавну і періодичну Інший метод, який може бути використаний функцію подібності, як показано, наприклад, на для знаходження періодичності кардюцикла з криФіг 9(Ь) вого подібності - внутрішня взаємна кореляція Цей метод використовує дільницю функції подібОднак, якщо «нерівність» і/або періодичність ності, тобто групу послідовних величин Напривідсутні, це може означати деякі проблеми в форклад, в таблиці, показаній на Фіг 10, ця дільниця муванні ІВУД-зображень, тобто наявність артефаможе складатися з перших чотирьох послідовних кту, викликана, наприклад, механічним або електзображень, тобто зображень №№1 - 4 Після виронним збоєм Це наочно показує наступний бору ДІЛЬНИЦІ здійснюється його взаємна корелямалюнок Фіг 11 показує графік коефіцієнта взаємція з самим собою з отриманням величини взаємної кореляції, отриманий з послідовних ІВУДної кореляції 1 Далі, здійснюється взаємна зображень Цей графік аналогічний по побудові кореляція цієї ДІЛЬНИЦІ з дільницею такого ж розміграфіку взаємної кореляції Фіг9(Ь), але в цьому ру, взятою з функції подібності, але здвинутою на прикладі він отриманий за допомогою іншого відодне зображення уперед Ця операція повторютворюючого катетера, застосованого в іншому ється із зображенням, здвинутим на два зобраоб'єкті ження уперед, і т д У прикладі, показаному на У цьому прикладі ясно видно, що функція поФіг 10, дільниця {0,8, 0,83, 0,89, 0,85} буде взаємно дібності не показує чіткої періодичності і має не корелювати з дільницею, здвинутою на одне зоплавний, а крутий, або загострений, характер У браження {0,83, 0,89, 0,85, 0,82}, потім дільниця цьому випадку така поведінка графіка подібності {0,8, 0,83, 0,89, 0,85} буде взаємно корелювати з була викликана нерівномірністю обертання ІВУДдільницею, здвинутою на два зображення {0,89, перетворювача, відповідального за випущен0,85, 0,82, 0,87}, і т д Нижній рядок в таблиці на ня/збір ультразвукових сигналів, що показуються Фіг 10 показує результати цієї внутрішньої взаємна зображенні Цей тип артефакту ІНОДІ З'ЯВЛЯЄТЬної кореляції Перше значення 1 є результатом СЯ у вузлах катетер-перетворювач, в яких є рухомі взаємної кореляції ДІЛЬНИЦІ З самою собою Ці механічні частини значення взаємної кореляції досліджуються з меФункція подібності, яка відображає нормальні тою знаходження локальних максимумів У цьому умови відтворення зображення, може служити і прикладі вони розташовані в зображенні №1 і в для іншої мети Це пов'язано з розташуванням зображенні №5 0 х значення показані жирним максимумів в кожному циклі функції подібності шрифтом) Періодичність обчислюється як різниця Знаходження цих максимумів може бути важливо між місцезнаходженням локальних максимумів і для алгоритмів обробки зображень, які оброблятим місцем, звідки був початий пошук (тобто зоють декілька послідовних зображень разом Зображення №1) У цьому прикладі періодичність браження, що виявилися біля зображень, ВІДПОВІрівна часу, який закінчився від отримання зобраДНИХ максимумам, мають тенденцію до високої ження до №1 до отримання зображення до №5, подібності і малого взаємнопереміщення відносно тобто 5-1=4 зображення Після знаходження періодин одного Крім того, якщо треба вибрати зооду пошук поновлюється з використанням ДІЛЬНИбраження, що входять в одну і ту ж фазу послідоЦІ, яка оточує локальний максимум, тобто зобравних кардюциклів, як правило, найкраще вибирати ження №5 У цьому прикладі нова дільниця, їх за допомогою максимума (функції подібності) в наприклад, може бути групою величин подібності, кожному циклі що належать зображенням №№ 4-7 Внаслідок природи типу обчислень, що застосовується, операція внутрішньої взаємної кореляції в певній часовій точці вимагає використання Наприклад, в методиці одного екрана ці зображення проектуються на екран, а зазори заповнюються інтерпольованими зображеннями За допомогою цієї екранної методики можуть стабілі 43 57011 зуватися всі типи періодичних переміщень Етап логіки зсуву в процесі стабілізації також може використати контроль кардюваскулярної періодичності Якщо треба уникнути явища зносу, то величина накопиченого зсуву після кожного кардюцикла повинна бути дуже малою або нульовою, тобто сума всіх зсувів до кінця кожного періоду циклу повинна бути рівна нулю або величині, близькій до нуля Це означає, що явище зносу може бути обмежене шляхом використання логіки зсуву в поєднанні з контролем кардюваскулярної періодичності Тепер розглянемо Фіг 12 БІЛЬШІСТЬ ІВУДзображень можна розділити на три основні частини Центральна область (навколо катетера), позначена на Фіг 12 як "Просвіт", являє собою дійсний просвіт або внутрішній прохід (порожнина), через яку протікає рідина, тобто кров Навколо просвіту розташовується власне судина, позначена на Фіг 12 ЯК "Судина", що складається з декількох шарів тканини і бляшок (у разі захворювання) Судину оточує інша тканина', позначена на Фіг 12 як "Оточення", тобто м'язова тканина або тканина іншого органу, наприклад, серця в зображенні коронарної судини Якщо ІВУД-зображення переглядаються динамічно (тобто у вигляді фільму), то зображення внутрішньої частини, де протікає кров, і зовнішня частина судини звичайно показують іншу часову поведінку, ніж власне судина Автоматичний контроль часової поведінки пікселів в динамічному ІВУД-зображенні дозволяє використати інформацію, отриману в процесі ІВУД дослідження, для полегшення розшифровки ІВУДзображень Ця інформація може використовуватися для поліпшення екранних зображень шляхом фільтрації і придушення зображення деталей, що швидко змінюються, такої як рідина, тобто кров, і навколишніх тканин, з урахуванням їх часової поведінки Ця інформація може бути також використана для автоматичної сегментації з метою визначення розміру просвіту автоматично, шляхом ідентифікації рідини, тобто крові, і навколишньої тканини на основі часової поведінки текстурних елементів, яка утворена складаючими їх пікселями Для здійснення автоматичного контролю часової поведінки необхідна оцінка взаємозв'язків між елементами, утвореними ВІДПОВІДНИМИ пікселями послідовних зображень Виділення часової поведінки має певну схожість з методиками, що використовуються для операцій подібності на локальній основі, як описано вище Швидкі часові зміни відрізняються порівняно великими відносними змінами сірих величин ВІДПОВІДНИХ пікселів при переході від одного зображення до іншого Ці ШВИДКІ часові зміни можуть придушуватися на екрані шляхом вираження цих змін за допомогою утворення маски, яка множить початкове зображення Ця маска відображає часові зміни у величинах пікселів Проблема, виникаюча при цій ОЦІНЦІ, складається в тому, щоб визначити, чи- виникають зміни сірих величин у величинах ВІДПОВІДНИХ пікселів через течію або зміну рідини, або через переміщення судини/катетера Виконання цієї оцінки на стабілізова 44 них зображеннях долає або, принаймні, мінімізує цю проблему Далі використовуються наступні визначення В - поточне (стабілізоване або нестабілізоване) зображення, А - передування (стабілізоване або нестабілізоване) зображення, С - подальше (стабілізоване або нестабілізоване) зображення, абс - абсолютна величина Матриці, що використовуються, можуть бути в декартовій або полярній формі Приведена далі операція, що має результатом матрицю D, проводиться таким чином D1 являє собою матрицю, в якій кожний піксель з координатами X, Y є сумою абсолютних різниць невеликої його околиці, наприклад, з 9 елементів (Х-2 Х+2, Y2 Y+2 квадрат 3x3), взятої із зображень А і В, ВІДПОВІДНО Наприклад, наступна схема показує ВІДПОВІДНІ пікселі (жирним шрифтом) і їх найближчу околицю в матрицях А і В А В D1 1 4 51 3 6 8 6 7 15 3 4 70 190 З 5 83 2 16 Пікселю в матриці D 1 , положення якого відповідає пікселям з величиною 4 (в В) і 7 (в А), буде привласнена наступна величина абс(1-3) + абс(4-6) + абс(51-8) + абс(б-З) + абс(7-4) + абс( 15-70) + абс(3-2) + абс(5-1) + абс(83-6) = 190 D2 обчислюється таким же чином, але для матриць В і С D1 і D2 є, в суті, матрицями різниць, які усереднюються з використанням околиці 3x3, щоб ослабити локальні флуктуації або перешкоди Великі зміни сірої величини між зображеннями А і В або між В і С будуть виражатися у вигляді відносно високих величин в матрицях D1 і D2, ВІДПОВІДНО ПОТІМ формується нова матриця, Dmax, в якій кожний піксель являє собою максимум з ВІДПОВІДНИХ пікселів в матрицях D1 і D2 Dmax = max (D1, D2) Де max (D1, D2) - кожний піксель в Dmax, який є максимальним з двох ВІДПОВІДНИХ пікселів в D1 і D2 Таким чином, єдина матриця Dmax істотно посилює великі зміни пікселів між матрицями А, В і С Потім З Dmax шляхом нормалізації утвориться матриця маски (MD), тобто кожний піксель в Dmax ділиться на максимальну величину Dmax Тому величини пікселів в MD знаходяться в діапазоні від нуля до одиниці Роль маски складається в множенні поточного зображення В таким чином, з утворенням нової матриці або зображення, визначуваний як BOUT BOUT= (1MDn)*Bfle В - початкове поточне зображення, BOUT - нове зображення, п - кожний піксель в матриці MD зводиться в міру n n звичайно являє собою число, наприклад, від 2 до 10, 1-MD11 - матриця, в якій величина кожного пікселя являє собою один мінус 45 величина ВІДПОВІДНОГО пікселя в MD 11 При виконанні віднімання 1-MD малі величини MD, які відображають деталі, що повільно зміню11 ються, стають високими величинами в 1-MD Крім того, збільшується імовірність того, що тільки деталі, які повільно змінюються будуть мати високі величини завдяки попередньому підвищенню високих величин MD (шляхом створення MD як максимума між матрицями D1 і D2) 11 Множенням маски (1-MD ) на поточне зображення В створюється нове зображення , в якому вигляд пікселів, що повільно змінюються, поліпшується, а величини пікселів, що швидко змінюються, меншають Число п визначає, наскільки явно придушення деталей, що швидко змінюються, буде видно на екрані Фіг 13 представляє результати часової фільтрації Ліве зображення являє собою початкове ІВУД-зображення (тобто матрицю В) коронарної судини, як він виглядає на поточному дисплеї Праве зображення зазнало етапів обробки, описаних вище, тобто часову фільтрацію (матриця ) Зверніть увагу, що в правому зображенні кров і навколишня тканина відфільтровані (пригнічені), а просвіт і межі судини ідентифікуються більш ясно Автоматична сегментація диференціює рідину, тобто кров, і зовнішню частину від стінок судини на основі різниць між часовою поведінкою їх текстур Як і у разі часової фільтрації, цей метод заснований на взаємозв'язках між ВІДПОВІДНИМИ пікселями декількох послідовних зображень Якщо величини пікселів змінюються внаслідок взаємнопереміщень між зображеннями, то ефективність алгоритму погіршується Виконання стабілізації перед автоматичною сегментацією долає або, принаймні, мінімізує цю проблему Як і у разі часової фільтрації, використовуються наступні визначення В - поточне (стабілізоване або нестабілізоване) зображення, А - передування (стабілізоване або нестабілізоване) зображення, С - подальше (стабілізоване або нестабілізоване) зображення Матриці можуть бути в декартовій або полярній формах Якість текстури може бути представлена таким чином передбачимо (предположим ?), що чотири найближчих сусіди пікселя з величиною «а» мають величини «b», «c», «d» і «є», тоді класифікація пікселя «а» буде залежати від його взаємозв'язків з «Ь», «с», «d» і «є» Це можна представити наступною схемою b cad є Тепер можна сформувати наступні категорії У вертикальному напрямі якщо а>Ь і а>е, то «а» класифікується як такий, що належить до категорії І, якщо а>Ь і ас і a
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice and method for intravascular ultrasound imaging (variants)
Назва патенту російськоюСпособ внутрисосудистой ультразвуковой визуализации (варианты)
МПК / Мітки
МПК: A61B 8/00
Мітки: варіанти, інтраваскулярного, відтворення, зображень, спосіб, ультразвукового
Код посилання
<a href="https://ua.patents.su/32-57011-sposib-intravaskulyarnogo-ultrazvukovogo-vidtvorennya-zobrazhen-varianti.html" target="_blank" rel="follow" title="База патентів України">Спосіб інтраваскулярного ультразвукового відтворення зображень (варіанти)</a>
Спосіб формування радіометричних зображень об’єктів
Номер патенту: 21540
Опубліковано: 16.12.1997
Автори: Волошиновський Святослав Володимирович, Грицьків Зенон Дмитрович
МПК: G01S 3/02
Мітки: формування, об'єктів, радіометричних, спосіб, зображень
Формула / Реферат:
Спосіб формування радіометричних зображень об'єктів, який включає приймання власного електромагнітного випромінювання об'єктів з допомогою антени, підсилення, детектування, ітераційну обробку отриманого сигналу та подання обробленого сигналу на пристрій відтворення радіометричного зображення, який відрізняється тим, що використовують антену з підвищеним рівнем бокових пелюстків діаграми спрямованості.
Спосіб розпізнавання зображень
Номер патенту: 39442
Опубліковано: 15.06.2001
Автори: Остап Володимир Петрович, Русин Богдан Павлович, Остап Олег Петрович
МПК: G06K 9/68
Мітки: зображень, спосіб, розпізнавання
Формула / Реферат:
1. Спосіб розпізнавання зображень, згідно з яким формують вхідне оцифроване растрове зображення, порівнюють з еталонними оцифрованими растровими зображеннями, вхідне і еталонні зображення подають на блок двомірного прямого швидкого дискретного перетворення Фур'є, на виході отримують масиви просторових спектрів вхідного і еталонних зображень, який відрізняється тим, що масиви просторових спектрів вхідного і еталонних зображень подають на вхід...
Спосіб кольорокорекції комп’ютерних зображень

Номер патенту: 50066
Опубліковано: 15.10.2002
Автори: Ференц Мирослава Миронівна, Гунько Степан Миколайович, Дудяк Василь Олексійович, Ференц Мирон Іванович
МПК: G03F 3/00
Мітки: комп'ютерних, спосіб, кольорокорекції, зображень
Формула / Реферат:
Спосіб кольорокорекції комп'ютерних зображень, який полягає у виведенні сканованого кольорового зображення оригіналу на дисплей комп'ютера, введенні коригуючого зображення у новий шар і об'єднанні його із зображенням оригіналу, доведенні коригованого зображення до нормального контрасту, який відрізняється тим, що як коригуюче зображення беруть 20-30% інверсивну кольорову копію оригіналу, у якій всі кольори по кольоровому тону замінені на...
Спосіб комп’ютерної корекції кольорових зображень
Номер патенту: 35055
Опубліковано: 15.03.2001
Автори: Ференц Мирон Іванович, Ференц Мирослава Миронівна, Гунько Степан Миколайович
МПК: G03F 3/00
Мітки: спосіб, кольорових, комп'ютерної, зображень, корекції
Формула / Реферат:
Спосіб комп'ютерної корекції кольорових зображень, який полягає у виведенні сканованого кольорового зображення оригіналу на дисплей комп'ютера, коректуванні кольоропередачі на дисплеї комп'ютера за допомогою механізму коректуючих шарів, відрізняється тим. що корекцію кольорового зображення проводять інверсивним зображенням 15-20% його ахроматичної колії, яке вводять а новий шар і об'єднують із зображенням оригіналу при нормальному режимі...
Спосіб безвтратного стискання зображень
Номер патенту: 35499
Опубліковано: 15.03.2001
Автори: Русин Богдан Павлович, Мосоров Володимир Якович
Мітки: спосіб, стискання, зображень, безвтратного
Формула / Реферат:
Спосіб безвтратного стискання зображень, згідно з яким формують з вхідного оцифрованого зображення, представленого матрицею [b(i,j)], i=1, 2, ..., N; j=1, 2, ..., M, де N, M - відповідно, кількість елементів у рядку та кількість рядків, довідкове субзображення [r(і,j)], елементи якого формують з елементів, які знаходяться за парними адресами кожного парного рядка, горизонтальне субзображення [h(i,j)], елементи якого формують з елементів, які...
Попередній патент: Спосіб одержання 2,6-диметил-4-трет-бутилбензилхлориду
Наступний патент: Висівний апарат
Випадковий патент: Спосіб одержання фтороапатиту