Активовані послуги визначення місцеположення
Номер патенту: 100800
Опубліковано: 25.01.2013
Автори: Вахтер Андреас К., Едж Стефен В., Барроз Кірк Аллан
Формула / Реферат
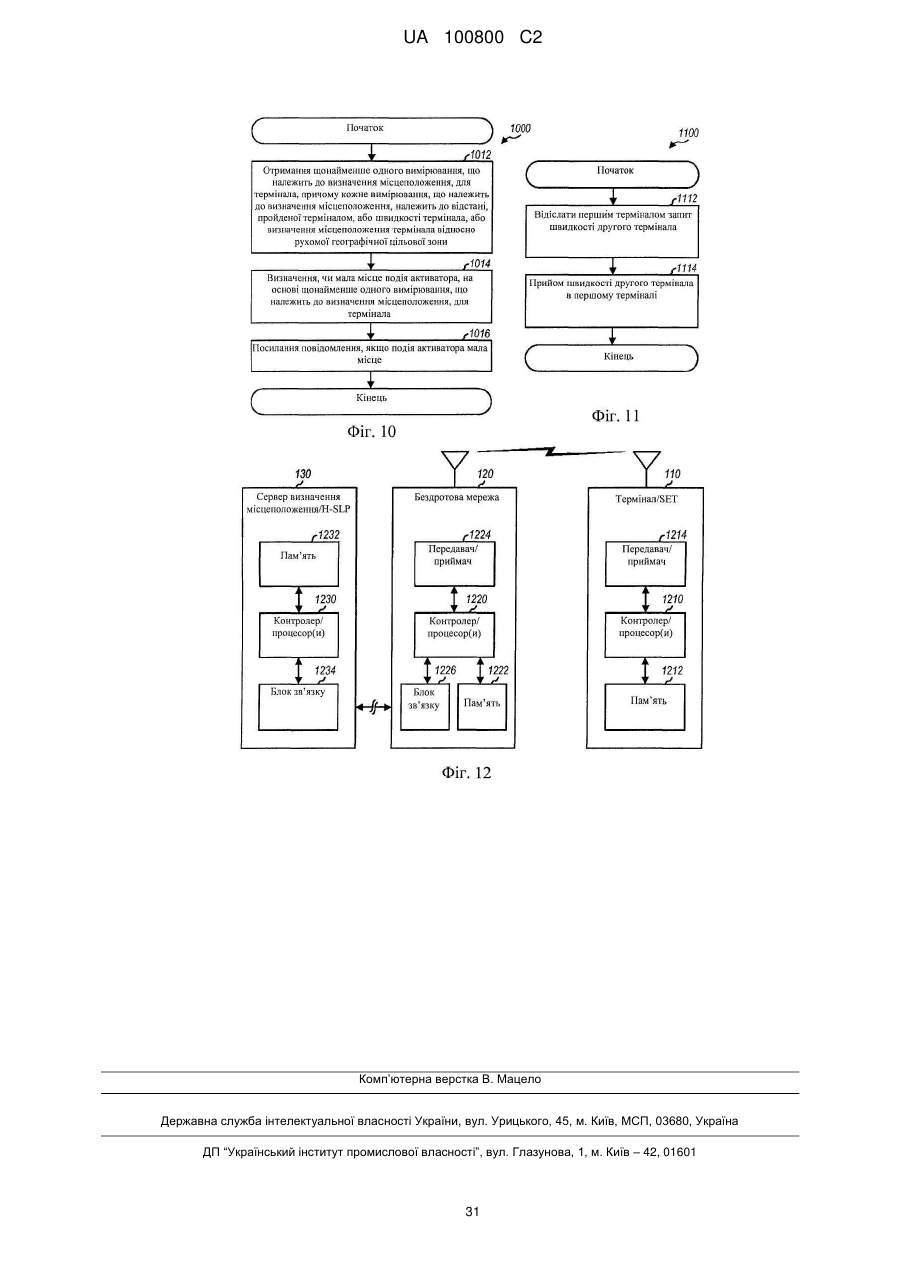
1. Спосіб підтримки послуг визначення місцеположення, що містить: отримання щонайменше одного вимірювання, що належить до визначення місцеположення, для термінала, причому кожне вимірювання, що належить до визначення місцеположення, призначене для відстані, пройденої терміналом; і
визначення, чи мала місце ініціююча подія, на основі щонайменше одного вимірювання, що належить до визначення місцеположення, для термінала, причому визначення, чи мала місце ініціююча подія, містить визначення, чи мала місце ініціююча подія, на основі відстані, пройденої терміналом.
2. Спосіб за п. 1, в якому визначення відстані, пройденої терміналом, містить періодичне визначення місцеположення термінала, і
визначення відстані, пройденої терміналом, за допомогою накопичення відстаней між послідовними місцеположеннями термінала з часу останньої ініціюючої події.
3. Спосіб за п. 1, в якому визначення відстані, пройденої терміналом, містить визначення відстані, пройденої терміналом, на основі відстані між поточним місцеположенням термінала і початковим місцеположенням.
4. Спосіб за п. 1, в якому визначення відстані, пройденої терміналом, містить визначення відстані, пройденої терміналом, на основі відстані між поточним місцеположенням термінала і початковим місцеположенням вздовж конкретного маршруту.
5. Спосіб за п. 1, в якому визначення, чи мала місце ініціююча подія, містить визначення, що ініціююча подія відбулася, якщо відстань, пройдена терміналом, перевищує заздалегідь задану відстань.
6. Спосіб за п. 1, який додатково містить відправлення повідомлення, якщо ініціююча подія відбулася.
7. Спосіб за п. 1, в якому щонайменше одне вимірювання, що належить до визначення місцеположення, для термінала, отримане на основі щонайменше одного сигналу, що обмінюється між терміналом і другим терміналом.
8. Спосіб за п. 1, який додатково містить
обмін повідомленнями Безпечного Визначення Місцеположення Користувацької Площини (SUPL), щоб отримати щонайменше одне вимірювання, що належить до визначення місцеположення.
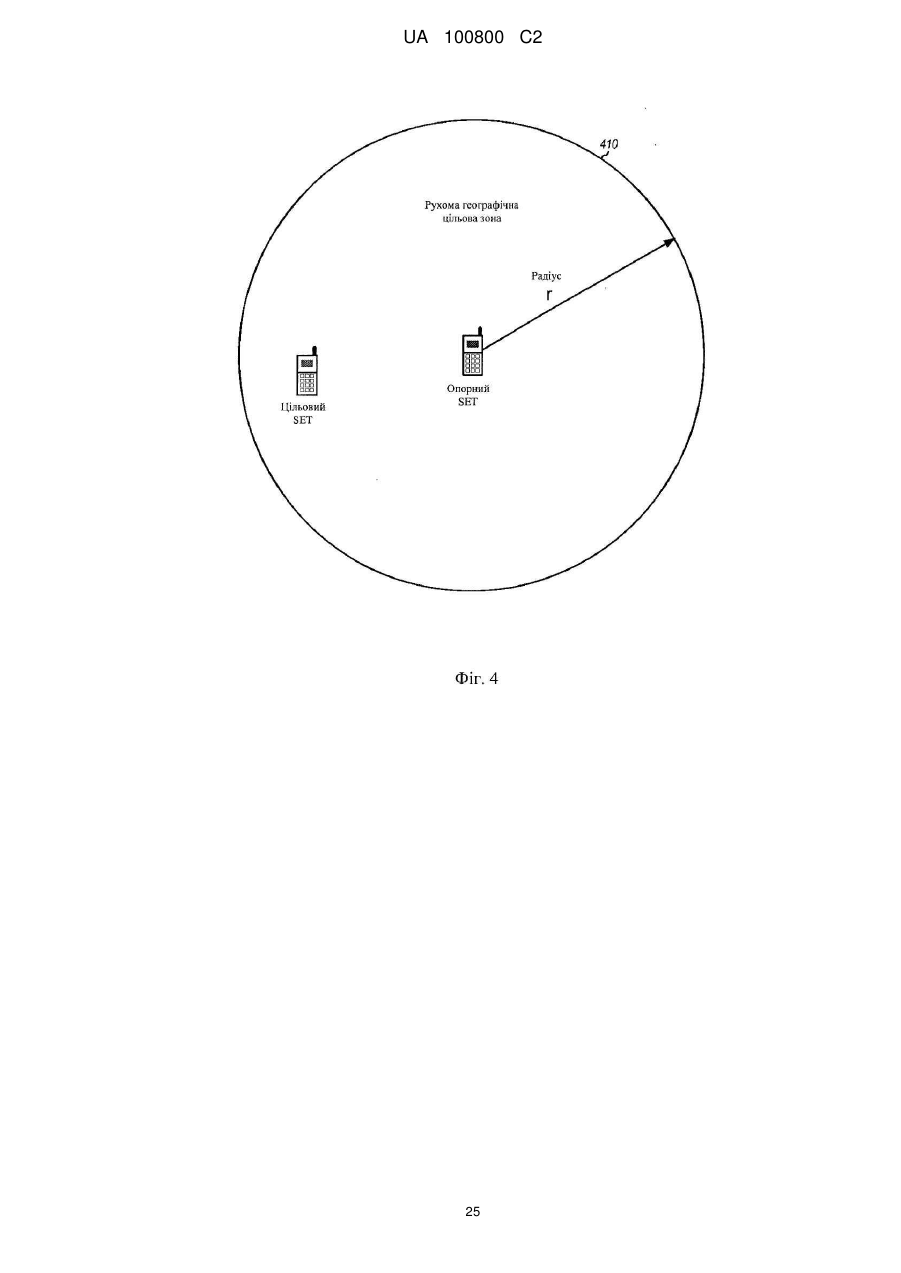
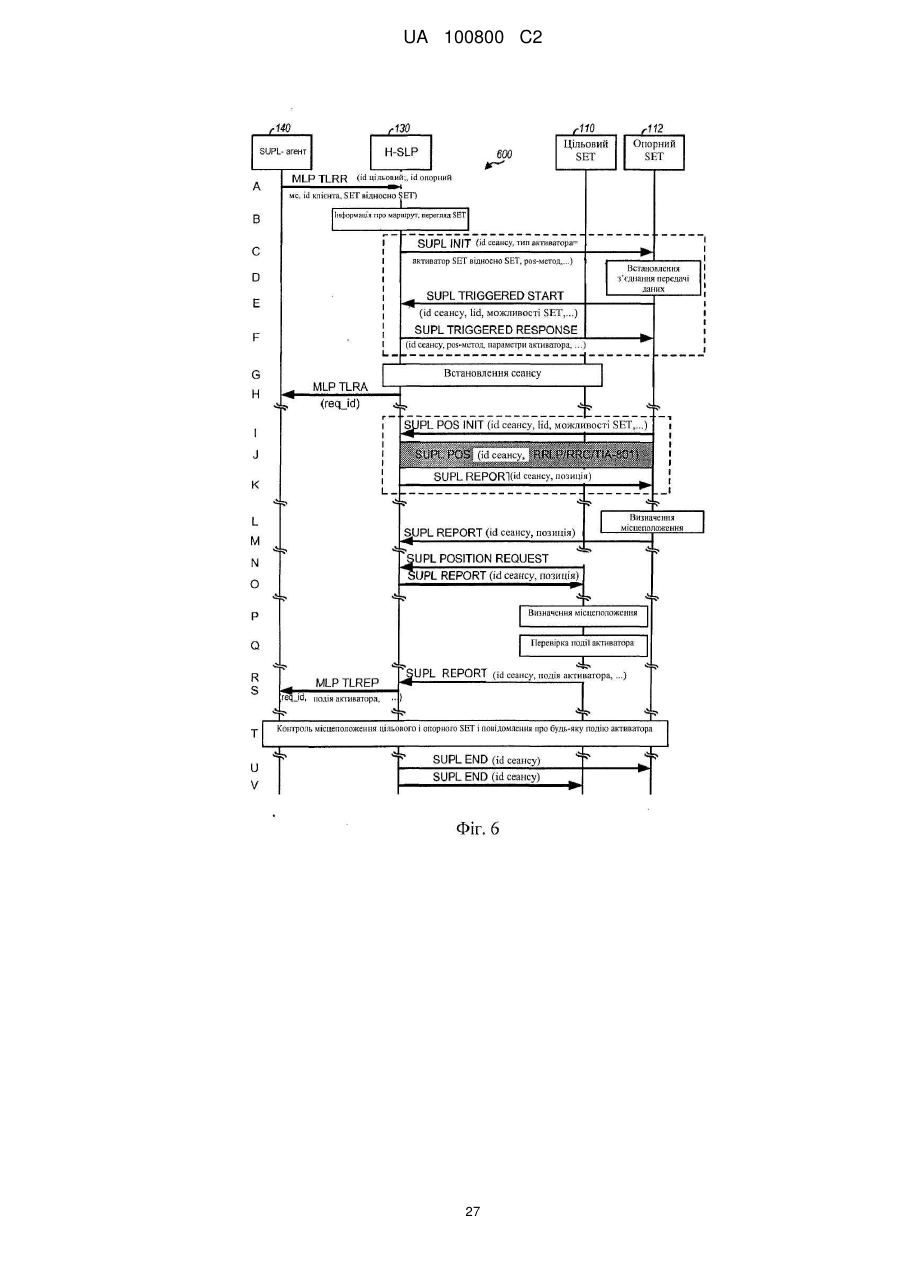
9. Спосіб підтримки послуг визначення місцеположення, що містить: отримання щонайменше одного вимірювання, що належить до визначення місцеположення, для термінала, причому кожне вимірювання, що належить до визначення місцеположення, призначене для визначення місцеположення термінала відносно рухомої географічної цільової зони; і
визначення, чи мала місце ініціююча подія, на основі щонайменше одного вимірювання, що належить до визначення місцеположення, для термінала, причому визначення, чи мала місце ініціююча подія, містить визначення, чи мала місце ініціююча подія, на основі місцеположення термінала відносно рухомої географічної цільової зони.
10. Спосіб за п. 9, в якому визначення місцеположення термінала відносно рухомої географічної цільової області містить:
визначення місцеположення опорного термінала, і
визначення рухомої географічної цільової зони на основі місцеположення опорного термінала.
11. Спосіб за п. 10, в якому рухома географічна цільова зона є круглою зоною, центрованою в місцеположенні опорного термінала і має заздалегідь заданий радіус.
12. Спосіб за п. 9, в якому визначення, чи мала місце ініціююча подія, містить визначення, що ініціююча подія відбулася, якщо місцеположення термінала задовольняє критерій відносно рухомої географічної цільової зони, причому критерієм є знаходження всередині, зовні, вхід або вихід з рухомої географічної цільової зони.
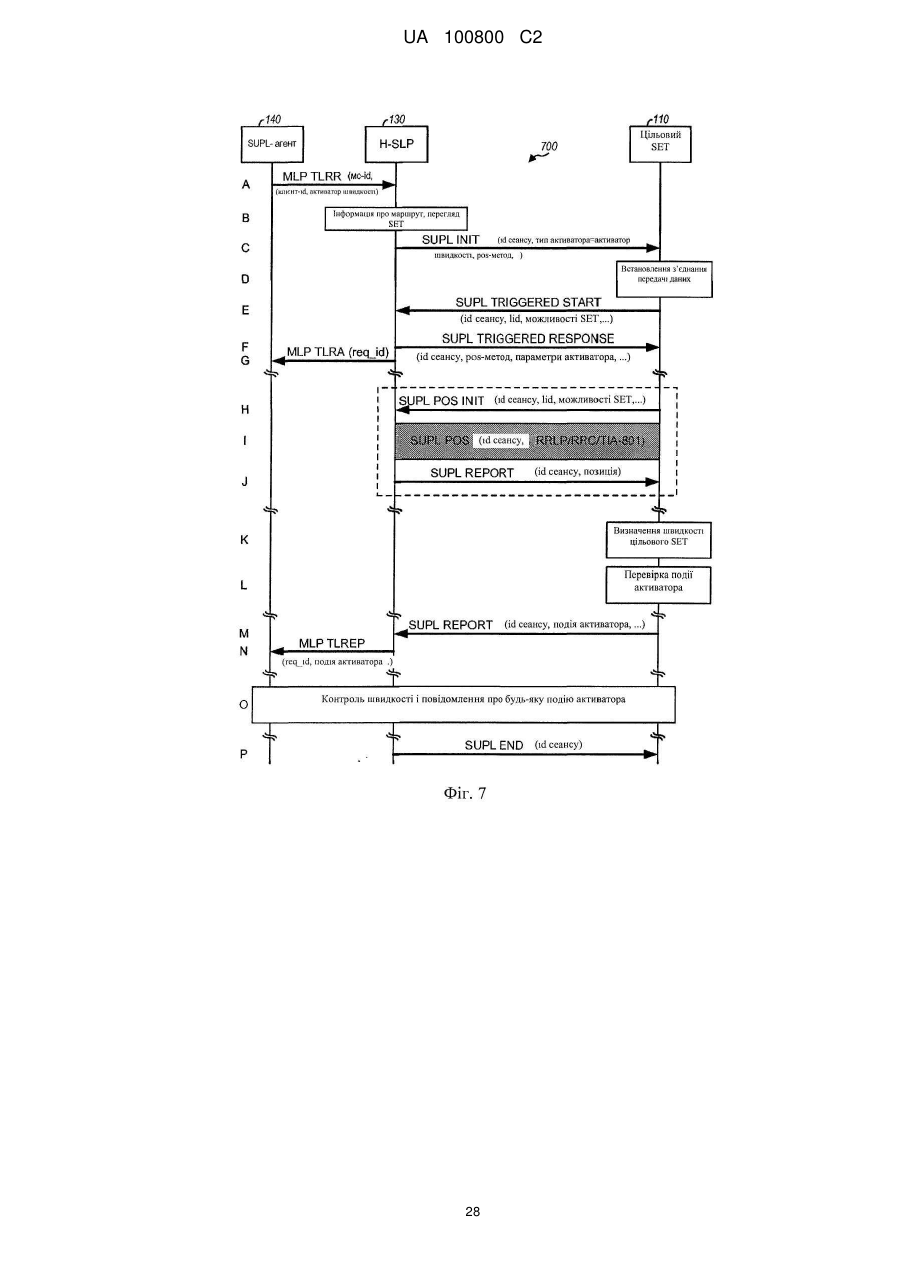
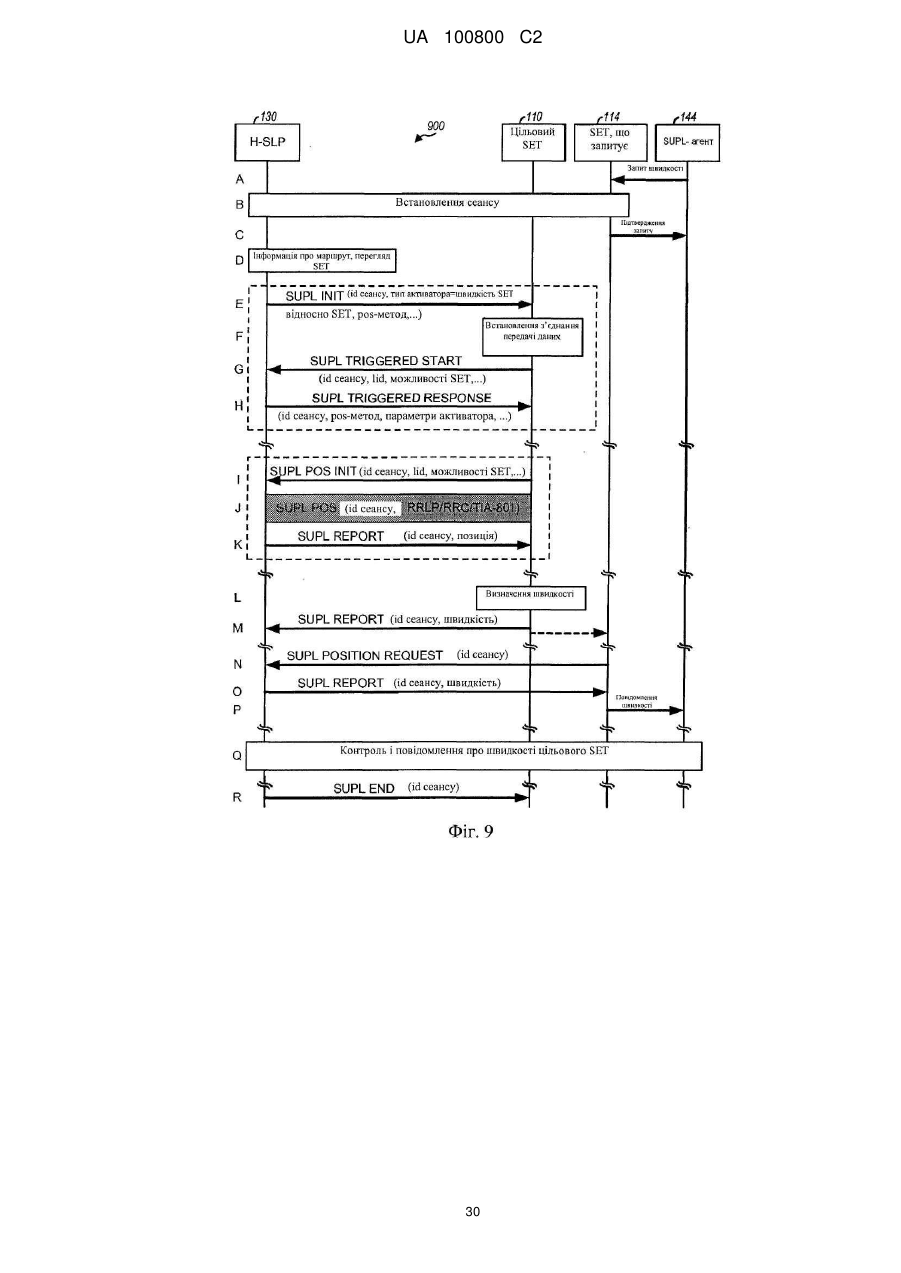
13. Спосіб підтримки послуг визначення місцеположення, що містить: отримання щонайменше одного вимірювання, що належить до визначення місцеположення, для термінала, причому кожне вимірювання, що належить до визначення місцеположення, призначене для швидкості термінала; і
визначення, чи мала місце ініціююча подія, на основі щонайменше одного вимірювання, що належить до визначення місцеположення, для термінала, причому визначення, чи мала місце ініціююча подія, містить визначення, чи дійсно швидкість термінала в будь-який момент часу з часу останньої ініціюючої події відповідає або перевищує першу заздалегідь задану швидкість.
14. Спосіб за п. 13, в якому визначення, чи мала місце ініціююча подія, містить визначення, що ініціююча подія відбулася, якщо швидкість термінала менша другої заздалегідь заданої швидкості, і після цього відповідає або перевищує першу заздалегідь задану швидкість.
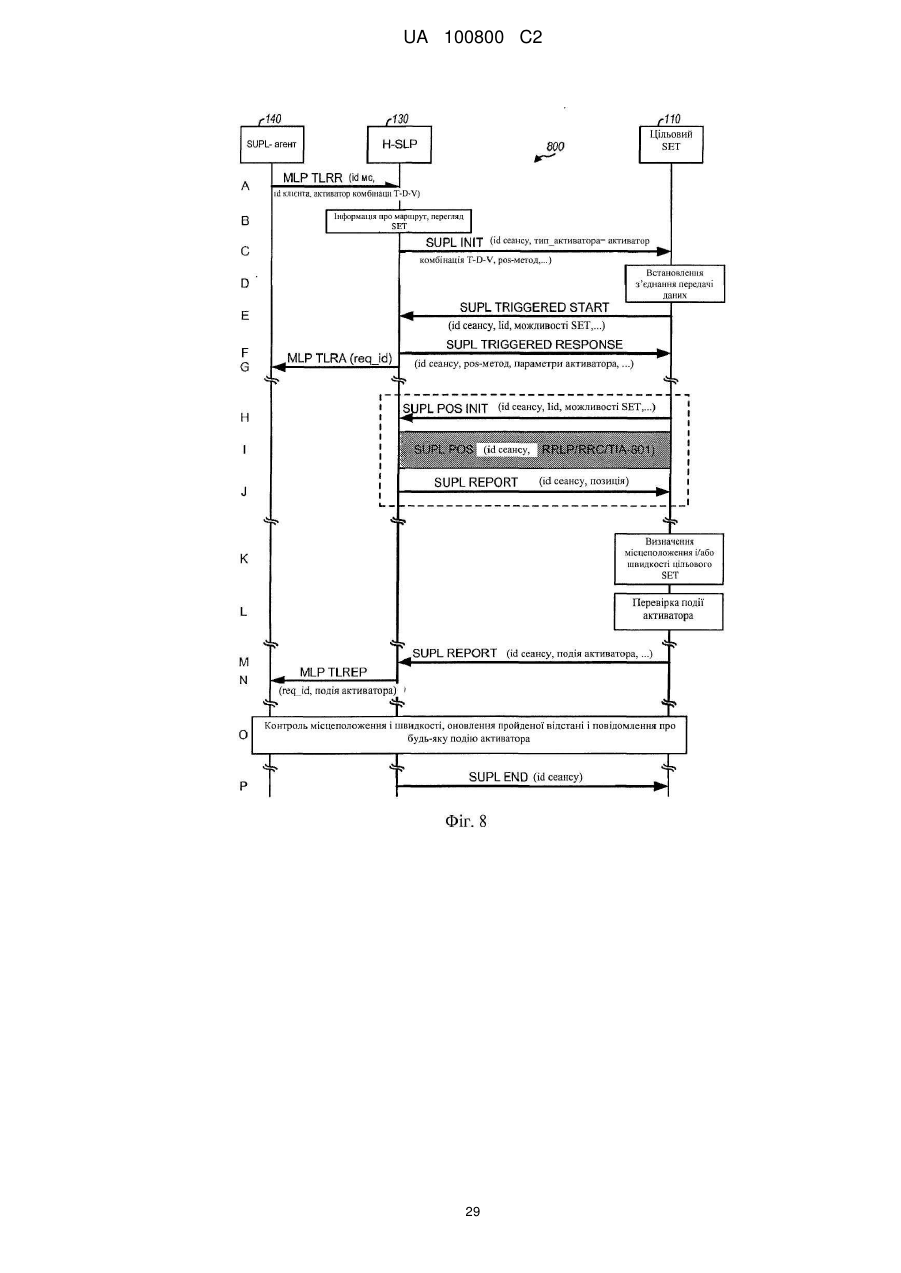
15. Спосіб підтримки послуг визначення місцеположення, що містить: отримання щонайменше одного вимірювання, що належить до визначення місцеположення, для термінала, причому кожне вимірювання, що належить до визначення місцеположення, призначене для відстані, пройденої терміналом, і швидкості термінала; і
визначення, чи мала місце ініціююча подія, на основі щонайменше одного вимірювання, що належить до визначення місцеположення, для термінала, причому визначення, чи мала місце ініціююча подія, містить визначення, чи мала місце ініціююча подія, на основі відстані, пройденої терміналом, і швидкості термінала.
16. Спосіб за п. 15, в якому визначення, чи мала місце ініціююча подія, також основане на часі, що минув, з часу останньої ініціюючої події.
17. Спосіб за п. 15, в якому визначення, чи мала місце ініціююча подія, містить:
визначення множинних виразів, причому кожен вираз призначений для відстані, пройденої терміналом відносно заздалегідь заданої відстані, або максимальної швидкості термінала відносно заздалегідь заданої швидкості, або часу, що минув, відносно заздалегідь заданого часу, і
визначення, чи мала місце ініціююча подія, на основі функції множинних виразів.
18. Пристрій для підтримки послуг визначення місцеположення, що містить: засіб для отримання щонайменше одного вимірювання, що належить до визначення місцеположення, для термінала, причому кожне вимірювання, що належить до визначення місцеположення, призначене для відстані, пройденої терміналом; і
засіб для визначення, чи мала місце ініціююча подія, на основі щонайменше одного вимірювання, що належить до визначення місцеположення, для термінала, причому засіб для визначення, чи мала місце ініціююча подія, містить засіб для визначення, чи мала місце ініціююча подія, на основі відстані, пройденої терміналом.
19. Пристрій за п. 18, в якому засіб для визначення, чи мала місце ініціююча подія, містить засіб для визначення, що ініціююча подія відбулася, якщо відстань, пройдена терміналом, перевищує заздалегідь задану відстань.
20. Пристрій за п. 18, який додатково містить:
засіб для визначення місцеположення опорного термінала, і засіб для визначення рухомої географічної цільової зони, на основі місцеположення опорного термінала.
21. Пристрій для підтримки послуг визначення місцеположення, що містить:
засіб для отримання щонайменше одного вимірювання, що належить до визначення місцеположення, для термінала, причому кожне вимірювання, що належить до визначення місцеположення, призначене для визначення місцеположення термінала відносно рухомої географічної цільової зони; і
засіб для визначення, чи мала місце ініціююча подія, на основі щонайменше одного вимірювання, що належить до визначення місцеположення, для термінала, причому засіб для визначення, чи мала місце ініціююча подія, містить засіб для визначення, чи мала місце ініціююча подія, на основі місцеположення термінала відносно рухомої географічної цільової зони.
22. Пристрій для підтримки послуг визначення місцеположення, що містить:
засіб для отримання щонайменше одного вимірювання, що належить до визначення місцеположення, для термінала, причому кожне вимірювання, що належить до визначення місцеположення, призначене для відстані, пройденої терміналом; і
засіб для визначення, чи мала місце ініціююча подія, на основі щонайменше одного вимірювання, що належить до визначення місцеположення, для термінала, причому засіб для визначення, чи мала місце ініціююча подія, містить засіб для визначення, чи мала місце ініціююча подія, на основі того, чи дійсно швидкість термінала в будь-який момент часу з часу останньої ініціюючої події відповідає або перевищує першу заздалегідь задану швидкість.
23. Пристрій за п. 22, в якому засіб для визначення, чи мала місце ініціююча подія, містить:
засіб для визначення максимальної швидкості термінала, з часу останньої ініціюючої події, і
засіб для визначення, що ініціююча подія відбулася, якщо максимальна швидкість перевищує заздалегідь задану швидкість.
24. Пристрій для підтримки послуг визначення місцеположення, що містить:
засіб для отримання щонайменше одного вимірювання, що належить до визначення місцеположення, для термінала, причому кожне вимірювання, що належить до визначення місцеположення, призначене для відстані, пройденої терміналом, або швидкості термінала; і
засіб для визначення, чи мала місце ініціююча подія, на основі щонайменше одного вимірювання, що належить до визначення місцеположення, для термінала, причому щонайменше одне вимірювання, що належить до визначення місцеположення, призначене для відстані, пройденої терміналом, і швидкості термінала, і причому засіб для визначення, чи відбулась ініціююча подія, містить засіб для визначення, чи мала місце ініціююча подія, на основі відстані, пройденої терміналом, і швидкості термінала.
25. Пристрій за п. 24, в якому засіб для визначення, чи мала місце ініціююча подія, містить:
засіб для визначення множинних виразів, причому кожен вираз призначений для відстані, пройденої терміналом відносно заздалегідь заданої відстані, або максимальної швидкості термінала відносно заздалегідь заданої швидкості, або часу, що минув, відносно заздалегідь заданого часу, і
засіб для визначення, чи мала місце ініціююча подія, на основі функції множинних виразів.
26. Пристрій для підтримки послуг визначення місцеположення, що містить:
щонайменше один процесор, сконфігурований з можливістю отримати щонайменше одне вимірювання, що належить до визначення місцеположення, для термінала, причому кожне вимірювання, що належить до визначення місцеположення, призначене для відстані, пройденої терміналом, і визначати, чи мала місце ініціююча подія, на основі щонайменше одного вимірювання, що належить до визначення місцеположення, для термінала, причому щонайменше один процесор сконфігурований з можливістю визначати відстань, пройдену терміналом, і визначати, чи мала місце ініціююча подія, на основі відстані, пройденої терміналом.
27. Пристрій за п. 26, в якому щонайменше один процесор конфігурується з можливістю визначати, що ініціююча подія відбулася, якщо відстань, пройдена терміналом, перевищує заздалегідь задану відстань.
28. Пристрій за п. 26, в якому щонайменше один процесор конфігурується з можливістю визначати місцеположення опорного термінала, і визначати рухому географічну цільову зону, на основі визначення місцеположення опорного термінала.
29. Пристрій для підтримки послуг визначення місцеположення, що містить:
щонайменше один процесор, сконфігурований з можливістю отримати щонайменше одне вимірювання, що належить до визначення місцеположення, для термінала, причому кожне вимірювання, що належить до визначення місцеположення, призначене для визначення місцеположення термінала відносно рухомої географічної цільової зони, і визначати, чи мала місце ініціююча подія, на основі щонайменше одного вимірювання, що належить до визначення місцеположення, для термінала, причому щонайменше один процесор сконфігурований з можливістю визначати, чи мала місце ініціююча подія на основі визначення місцеположення термінала відносно рухомої географічної цільової зони.
30. Пристрій для підтримки послуг визначення місцеположення, що містить:
щонайменше один процесор, сконфігурований з можливістю отримати щонайменше одне вимірювання, що належить до визначення місцеположення, для термінала, причому кожне вимірювання, що належить до визначення місцеположення, призначене для швидкості термінала, і визначати, чи мала місце ініціююча подія на основі щонайменше одного вимірювання, що належить до визначення місцеположення, для термінала, причому щонайменше один процесор сконфігурований з можливістю визначати швидкість термінала і визначати, чи мала місце ініціююча подія, на основі того, чи дійсно швидкість термінала в будь-який момент часу з часу останньої ініціюючої події відповідає або перевищує першу заздалегідь задану швидкість.
31. Пристрій за п. 30, в якому щонайменше один процесор конфігурується з можливістю визначати максимальну швидкість термінала з часу останньої ініціюючої події, і визначати, що ініціююча подія відбулася, якщо максимальна швидкість перевищує заздалегідь задану швидкість.
32. Пристрій для підтримки послуг визначення місцеположення, що містить:
щонайменше один процесор, сконфігурований з можливістю отримати щонайменше одне вимірювання, що належить до визначення місцеположення, для термінала, причому кожне вимірювання, що належить до визначення місцеположення, призначене для відстані, пройденої терміналом, або швидкості термінала, причому щонайменше один процесор конфігурується з можливістю визначати відстань, пройдену терміналом, і швидкість термінала, і визначати, чи мала місце ініціююча подія, на основі відстані, пройденої терміналом, і швидкості термінала.
33. Пристрій за п. 32, в якому щонайменше один процесор конфігурується з можливістю визначати множинні вирази, причому кожний вираз призначений для відстані, пройденої терміналом, відносно заздалегідь заданої відстані, або максимальної швидкості термінала відносно заздалегідь заданої швидкості, або часу, що минув, відносно заздалегідь заданого часу, і визначати, чи мала місце ініціююча подія, на основі функції множинних виразів.
Текст
Реферат: Описані способи для підтримки активованих послуг визначення місцеположення. У одному виконанні щонайменше одне вимірювання, що належить до визначення місцеположення, для термінала може бути отримане і використане, щоб виявити подію активатора. Для еквідистантно активованої послуги, подія активатора може бути оголошена, якщо відстань, пройдена терміналом, перевищує заздалегідь задану відстань. Для активованої послуги "термінал відносно термінала", подія активатора може бути оголошена, якщо термінал знаходиться всередині або зовні, або входить, або виходить з рухомої географічної цільової зони, визначеної опорним терміналом. Для активованої швидкістю послуги, подія активатора може бути оголошена, якщо максимальна швидкість термінала перевищує заздалегідь задану швидкість. Для послуги, активованої комбінацією швидкість-відстань-час, подія активатора може бути оголошена на основі відстані, пройденої терміналом, швидкості термінала, і часу, починаючи з останнього повідомлення. Для всіх послуг можна відіслати повідомлення, якщо подія активатора відбулася. UA 100800 C2 (12) UA 100800 C2 UA 100800 C2 5 10 15 20 25 30 35 40 45 50 55 Вимагання пріоритету згідно з §119 розділу 35 зводу законів США Дана заявка на патент вимагає пріоритет попередньої заявки на патент США № 61/151089, яка називається "Triggered Location Services," подана 9 лютого 2009 року, передана її правонаступнику, і включена в даний опис за допомогою посилання. Галузь техніки Даний опис належить загалом до зв'язку і, конкретніше, до способів для підтримки послуг визначення місцеположення. Рівень техніки Часто бажано, та іноді необхідно, знати місцеположення термінала в бездротовій мережі. Терміни "місцеположення" і "позиція" синонімічні і використовуються в даному описі взаємозамінно. Наприклад, користувач може використовувати термінал, щоб переглянути webсайт і може здійснити клацання на чутливому до місцеположення контенті. Місцеположення термінала може потім бути визначене і використовуватися, щоб надати відповідний контент користувачу. Існує багато інших сценаріїв, в яких знання місцеположення термінала корисне або необхідне. Потік повідомлень (який можна також назвати потоком або процедурою запитів) звичайно виконується, щоб отримати інформацію місцеположення (наприклад, оцінку місцеположення) для термінала і відіслати інформацію місцеположення в клієнтський об'єкт. Різні повідомлення звичайно пересилаються між одним або більше мережевими об'єктами, терміналом і клієнтським об'єктом під час потоку повідомлень. Ці повідомлення гарантують, що кожний об'єкт забезпечений відповідною інформацією, або може отримати цю інформацію з іншого об'єкту, щоб виконати позиціонування для термінала і/або доставити інформацію місцеположення клієнтському об'єкту. Однак, ці повідомлення додаються до трафіка в різних мережевих об'єктах. Додатковий трафік може бути особливо великим для послуг визначення місцеположення, в яких інформація місцеположення може періодично надаватися клієнтському об'єкту. Повідомлення можуть також збільшувати час відповіді для посилання інформації місцеположення в клієнтський об'єкт. Суть винаходу Способи для підтримки активованих послуг визначення місцеположення описані нижче. Активована послуга визначення місцеположення є послугою, в якій можна відіслати повідомлення з інформацією місцеположення кожний раз, коли відбувається подія активатора (запускаюча подія). Подія активатора може бути визначена різними способами для різних активованих послуг визначення місцеположення. У одному виконанні підтримки активованої послуги визначення місцеположення може бути отримане щонайменше одне вимірювання, що належить до визначення місцеположення, для термінала. Кожне вимірювання, що належить до визначення місцеположення, може належати до відстані, пройденої терміналом, або швидкості термінала, або місцеположення термінала відносно рухомої географічної цільової зони. Чи мала місце подія активатора, може бути визначено на основі щонайменше одного вимірювання, що належить до визначення місцеположення, для термінала. Повідомлення може бути відіслане, якщо подія активатора відбулася. У одному виконанні, для еквідистантно активованої послуги щонайменше одне вимірювання, що належить до визначення місцеположення, може мати місце для відстані, пройденої терміналом, яка може бути визначена по-різному, як описано нижче. Чи мала місце подія активатора, може бути визначено на основі відстані, пройденої терміналом. Наприклад, подія активатора може бути оголошена, якщо відстань, пройдена терміналом, перевищує заздалегідь задану відстань. У іншому виконанні для «термінал відносно термінала» - активованої послуги, щонайменше одне вимірювання, що належить до визначення місцеположення, може мати місце для місцеположення термінала відносно рухомої географічної цільової зони. Рухома географічна цільова зона може бути визначена на основі місцеположення опорного термінала. Подія активатора може бути оголошена, якщо місцеположення термінала відповідає критерію відносно рухомої географічної цільової зони. Критерієм може бути знаходження всередині, зовні, вхід в або вихід з рухомої географічної цільової зони. У ще одному виконанні, для активованої швидкістю послуги, щонайменше одне вимірювання, що належить до визначення місцеположення, може мати місце для швидкості термінала. Чи мала місце подія активатора, може бути визначено на основі швидкості термінала. Наприклад, швидкість термінала може періодично визначатися, і максимальна швидкість термінала з моменту останньої події активування може бути визначена. Подія 1 UA 100800 C2 5 10 15 20 25 30 35 40 45 50 55 активатора може бути оголошена, якщо максимальна швидкість перевищує заздалегідь задану швидкість. У ще одному виконанні для комбінації активованої швидкістю-відстанню-часом (T-D-V) послуги щонайменше одне вимірювання, що належить до визначення місцеположення, може мати місце для відстані, пройденої терміналом, і швидкості термінала. Чи мала місце подія активатора, може бути визначено на основі відстані, пройденої терміналом, швидкості термінала і/або затраченого часу, починаючи з останньої активованої події. Наприклад, множинні вирази можуть бути визначені. Кожен вираз може бути для відстані, пройденої терміналом відносно заздалегідь заданої відстані, або максимальної швидкості термінала відносно заздалегідь заданої швидкості, або затраченого часу відносно заздалегідь заданого часу. Чи мала місце подія активатора, може бути визначено на основі функції множинних виразів. У ще одному виконанні для послуги швидкості термінал відносно термінала, перший термінал може відіслати запит про швидкість другого термінала, наприклад, в центр визначення місцеположення. Перший термінал може після цього прийняти швидкість другого термінала або однократний або багаторазовий (наприклад, від центру визначення місцеположення або другого термінала) у відповідь на запит. Інші активовані послуги визначення місцеположення описані нижче. Різні аспекти і ознаки розкриття також описані детальніше нижче. Короткий опис креслень Фіг. 1 ілюструє зразкове розгортання, що підтримує послуги визначення місцеположення. Фіг. 2 і 3 ілюструють два потоки повідомлень для еквідистантно активованої послуги. Фіг. 4 ілюструє рухому географічну цільову зону. Фіг. 5 і 6 ілюструють два потоки повідомлень для «термінал відносно термінала» активованої послуги. Фіг. 7 ілюструє потік повідомлень для послуги, активованої швидкістю. Фіг. 8 ілюструє потік повідомлень для послуги, активованої комбінацією T-D-V. Фіг. 9 ілюструє потік повідомлень для послуги швидкості термінала відносно термінала. Фіг. 10 ілюструє процес для підтримки активованих послуг визначення місцеположення. Фіг. 11 ілюструє процес для підтримки послуги швидкості термінала відносно термінала. Фіг. 12 ілюструє блок-схему термінала, бездротової мережі і сервера визначення місцеположення. Докладний опис Способи для підтримки активованих послуг визначення місцеположення описані нижче. Ці способи можуть використовуватися для терміналів, що обмінюються з різними бездротовими мережами. Термін "мережа" і "система" часто використовується взаємозамінно. Наприклад, способи можуть використовуватися для бездротових мереж, визначених організацією, що називається "Проектом Партнерства 3-го покоління" (3GPP) і бездротових мереж, визначеними організацією, що називається "Проект Партнерства 3-го покоління 2" (3GPP2). Способи можуть також використовуватися для користувацької площини і архітектури/рішень визначення місцеположення площини керування. Архітектура визначення місцеположення користувацької площини є архітектурою визначення місцеположення, яка відсилає повідомлення для послуг визначення місцеположення через користувацьку площину. Користувацькою площиною є механізм для перенесення сигналізації і даних для додатків вищого рівня і використання носія користувацької площини, який типово реалізовується стандартними протоколами, такими як Протокол дейтаграм користувача (UDP), протокол TCP (TCP), та Інтернет-протокол (IP). Архітектурою визначення місцеположення площини керування є архітектура визначення місцеположення, яка відсилає повідомлення для послуг визначення місцеположення через площину керування. Площиною керування є механізм для перенесення сигналізації для додатків вищого рівня і типово реалізовується специфічними для мережі протоколами, інтерфейсами і повідомленнями сигналізації. Повідомлення, що підтримують послуги визначення місцеположення, переносяться як частина сигналізації в архітектурі площини керування і як частина даних (з точки зору мережі) в архітектурі користувацької площини. Контент повідомлень може, однак, бути одним і тим же або аналогічним і в користувацькій площині і в архітектурі визначення місцеположення площини керування. Для ясності деякі аспекти способів описані нижче для Безпечного Визначення Місцеположення Користувацької Площини (SUPL) від Open Mobile Alliance (OMA). SUPL застосуємо для 3GPP, 3GPP2 і WLAN мереж і описаний в публічно доступних документах від OMA. Для ясності термінологія SUPL використовується у великій частині опису нижче. 2 UA 100800 C2 5 10 15 20 25 30 35 40 45 50 55 60 Фіг. 1 показує зразкове розгортання, що підтримує послуги визначення місцеположення. Термінали 110, 112 і 114 можуть обмінюватися з бездротовою мережею 120, щоб отримати послуги зв'язку. Термінал може бути стаціонарним або мобільним і може також називатися як мобільна станція (MS), користувацьке обладнання (UE), термінал доступу (AT), абонентська станція, станція, і т. д. Термінал може бути стільниковим телефоном, персональним цифровим помічником (PDA), переносним пристроєм, бездротовим пристроєм, ноутбуком, бездротовим модемом, бездротовим телефоном, пристроєм телеметрії, пристроєм відстеження, і т. д. Термінал може називатися як Термінал з підтримкою SUPL (SET) в SUPL. Терміни "термінал" і "SET" використані взаємозамінно в даному описі. Бездротова мережа 120 може бути бездротовою глобальною мережею (WWAN), бездротовою мережею масштабу зони (WMAN), бездротовою локальною мережею (WLAN), і т. д. WWAN може бути мережею з множинним доступом з кодовим розділенням каналів (CDMA) IX, Широкосмуговою CDMA (WCDMA) мережею, мережею Глобальної Системи для Мобільного Зв'язку (GSM), мережею проекту довгострокового розвитку (LTE), і т. д. WMAN може реалізувати IEEE 802.16, що звичайно згадується як WiMAX. WLAN може реалізувати IEEE 802.11 (що звичайно згадується як Wi-Fi), HiperLAN, і т. д. SET може приймати і вимірювати сигнали від супутників, таких як супутник 150, щоб отримати вимірювання псевдодіапазону для супутників. Супутники можуть бути частиною Глобальної Системи Позиціонування Сполучених Штатів (GPS), європейської системи Galileo, російської системи GLONASS, або деякої іншої супутникової системи позиціонування (SPS), або комбінації цих систем. Вимірювання псевдодіапазону і відомі місцеположення супутників можуть використовуватися, щоб отримати оцінку місцеположення для SET. Оцінка місцеположення може також називатися як оцінка позиції, прив'язка позиції, і т. д. SET може також приймати і вимірювати сигнали від базових станцій в межах бездротової мережі 120, щоб отримати розподіл у часі і/або вимірювання рівня сигналу для базових станцій. Розподіл у часі і/або вимірювання рівня сигналу і відомі місцеположення базових станцій можуть використовуватися, щоб отримати оцінку місцеположення для SET. Звичайно оцінка місцеположення може бути отримана на основі вимірювань для супутників, базових станцій, псевдолітів і/або інших передавачів і використання одного або комбінації способів позиціонування. Платформа Визначення Домашнього Місцеположення SUPL (H-SLP) 130 може обмінюватися з терміналами SET, щоб підтримувати послуги визначення місцеположення для цих SET. Послуги визначення місцеположення можуть включати в себе будь-які послуги, основані на, або що належать до, інформації місцеположення. Послуги визначення місцеположення можуть включати в себе позиціонування, яке є процесом для визначення географічної або громадської оцінки місцеположення для SET. Позиціонування може забезпечити (i) широту, довготу, і можливо висотні координати і погрішність для географічної оцінки місцеположення або (ii) вуличну адресу для громадської оцінки місцеположення. Позиціонування може також забезпечити швидкість і/або іншу інформацію. H-SLP 130 може включати в себе Центр визначення місцеположення SUPL (SLC) 132 і Центр Позиціонування SUPL (SPC) 134. SLC 132 може підтримувати послуги визначення місцеположення, координувати роботу SUPL і взаємодіяти з терміналами SET по носієві користувацької площини. SLC 132 може виконувати функції для конфіденційності, ініціювання, безпеки, підтримки роумінгу, виставлення/складання рахунків, керування обслуговуванням, обчислення місцеположення, і т. д. SPC 134 може підтримувати позиціонування для терміналів SET і доставку даних допомоги до терміналів SET і може також бути відповідальним за повідомлення і процедури, що використовуються для обчислення місцеположення. SPC 134 може виконувати функції для безпеки, доставки даних допомоги, пошуку еталону, обчислення місцеположення і т. д. Агент SUPL 140 може бути клієнтом визначення місцеположення і може обмінюватися (наприклад, безпосередньо або через одну або більше мереж) з H-SLP 130, щоб отримати інформацію місцеположення для цільових терміналів SET. Цільовий SET - це SET, для якого інформація місцеположення шукається агентом SUPL. Інформація місцеположення може містити оцінку місцеположення і/або будь-яку інформацію, що належить до місцеположення або швидкості. SET може також мати агент SUPL, резидентний в SET. Наприклад, SET 114 має агент SUPL 144 в SET. SET може бути здатним визначати позицію і може намагатися визначити своє місцеположення з або без допомоги від мережі. Для режиму, основаного на SET, місцеположення SET може бути визначене цим SET, можливо за допомогою даних від SPC. Для режиму з асистуванням SET, місцеположення SET може бути визначене за допомогою SPC з 3 UA 100800 C2 5 10 15 20 допомогою (наприклад, вимірювання) від SET. SET може підтримувати один або більше способів позиціонування, такі як автономний GPS, з допомогою GPS (A-GPS), вдосконалена трилатерація прямої лінії зв'язку (A-FLT), вдосконалений спосіб різниці, що спостерігається, у часі (EOTD), різниці, що спостерігається, у часі прибуття (OTDOA), гібридний, і т. д. Для простоти термін "GPS" може належати до будь-якої SPS, такої як GPS, Galileo, GLONASS, і т. д. Автономний GPS і A-GPS способи можуть забезпечити оцінку місцеположення для SET, на основі виключно супутникових вимірювань, і мати високу точність. Гібридний спосіб може забезпечити оцінку місцеположення, основану і на супутникові і на вимірюваннях базової станції, і має високу точність і високу надійність. A-FLT, EOTD і OTDOA способи можуть забезпечити оцінку місцеположення, основану на розподілі часу вимірювань базових станцій, зроблених SET, і мати хорошу точність. SET може також підтримувати інші способи позиціонування. У одному аспекті можуть бути підтримані різні активовані послуги визначення місцеположення. Активована послуга визначення місцеположення може надати агенту SUPL інформацію місцеположення для цільового SET кожний раз, коли подія активатора відбувається. Різні активовані послуги визначення місцеположення можуть бути асоційовані з різними типами активатора. Таблиця 1 перелічує деякі активовані послуги визначення місцеположення і забезпечує короткий опис кожної активованої послуги визначення місцеположення. Інші активовані послуги визначення місцеположення можуть також бути підтримані на основі інших типів активатора. Активовані послуги визначення місцеположення в Таблиці 1 описані детальніше нижче. Таблиця 1 25 30 35 40 Активована послуга Опис визначення місцеположення Еквідистантно активована Періодично визначає місцеположення цільового SET і послуга повідомляє, коли цільовий SET переміститься на заздалегідь визначену відстань Активована послуга Періодично визначає місцеположення цільового SET і опорного «термінал відносно SET і повідомляє, коли цільовий SET знаходиться всередині або термінала» знаходиться зовні або входить або залишає географічну цільову зону з центром в опорному SET Активована швидкістю Періодично визначає швидкість цільового SET і повідомляє, коли послуга швидкість досягає заздалегідь визначеного рівня Активована комбінацією T-V- Періодично визначає місцеположення і/або швидкість цільового D послуга SET і повідомляє на основі цільового критерію, визначеного за допомогою минулого часу (Т), пройденої відстані (D) і/або швидкості (V) Еквідистантно активована послуга може періодично визначати місцеположення цільового SET і повідомляти інформацію місцеположення, коли цільовий SET перемістився на заздалегідь задану відстань. Відстань може належати до (i) відстані по прямій лінії між поточним місцеположенням SET і його початковим місцеположенням, коли почався моніторинг відстані, або (ii) повної відстані звичайно нелінійного шляху, простеженого за допомогою SET, починаючи із залишення його початкового місцеположення, або (iii) відстані, визначеної деяким іншим способом. Агент SUPL може ініціювати еквідистантно активовану послугу, ідентифікувати цільовий SET, і забезпечувати прийнятні параметри. Еквідистантно активована послуга може використовуватися, щоб періодично контролювати мобільний термінал (наприклад, SET 110) і відсилати повідомлення третій стороні (наприклад, агенту SUPL 140) кожний раз, коли термінал пройшов заздалегідь задану відстань. Наприклад, центр операцій автотранспортної компанії може хотіти знати місцеположення грузовиків в його поїздці після того, як пройдені кожні 10 миль. Третя сторона (наприклад, центр операцій) може відіслати запит місцеположення в сервер визначення місцеположення (наприклад, H-SLP 130). Сервер визначення місцеположення спільно з терміналом (який може бути здатним визначати позицію) може почати процедуру визначення позиції, яка може дозволити виявити - чи перемістився термінал на заздалегідь задану відстань. Кожний раз, коли ця подія відбувається, сервер визначення місцеположення може повідомити клієнта про місцеположення. Фіг. 2 показує структуру потоку 200 повідомлень для еквідистантно активованої послуги. Агент SUPL 140 може бажати знати кожний раз, коли цільовий SET 110 перемістився на заздалегідь задану відстань від останнього місцеположення, про яке повідомлено, і може 4 UA 100800 C2 5 10 15 20 25 30 35 40 45 50 55 60 відіслати запит визначення місцеположення з індикацією еквідистантного активатора до H-SLP 130 (етап А). H-SLP 130 може потім обмінюватися з цільовим SET 110, щоб встановити еквідистантно активований сеанс (етап В). Місцеположення SET 110 може періодично визначатися, використовуючи оснований на SET режим або режим з асистуванням SET. Для основаного на SET режимі, SET 110 може автономно виконувати вимірювання і визначати його місцеположення. SET 110 може обмінюватися з H-SLP 130, щоб отримати дані допомоги кожний раз, коли необхідно. Для режиму з асистуванням SET, SET 110 може брати участь в сеансі позиціонування з H-SLP 130, і H-SLP 130 може обчислювати оцінку місцеположення, основану на вимірюваннях від SET 110. У загальному випадку місцеположення SET 110 може бути визначено виключно за допомогою SET 110, SET 110 з допомогою від H-SLP 130, H-SLP 130 з допомогою від SET 110, і т. д. Крім того, оцінка активованої умови може бути виконана за допомогою або SET 110 або H-SLP 130. Місцеположення SET 110 може бути визначене на початку еквідистантно активованого сеансу і використовуватися як початкове місцеположення. Місцеположення SET 110 може також періодично визначатися під час еквідистантно активованого сеансу. У одному виконанні місцеположення SET 110 може бути визначене кожні X секунд, де X може бути будь-яким відповідним значенням і може бути визначене параметром активатора. У іншому виконанні місцеположення SET 110 може визначатися настільки часто наскільки можливо. У ще одному виконанні місцеположення SET 110 може бути визначене в моменти часу, встановлені на основі передбачуваної швидкості SET 110 і заздалегідь заданої відстані. Місцеположення SET 110 може таким чином бути визначене при коротших інтервалах для вищої швидкості і/або коротшої заздалегідь заданої відстані, і навпаки. У ще одному виконанні місцеположення SET 110 може бути визначене на основі датчика, який може виявити рух SET 110. Наприклад, місцеположення SET 110 може бути визначене, в той час як він є рухомим, і може бути зроблена пауза в той час, коли він нерухомий. Місцеположення SET 110 може також бути визначене відносно попереднього місцеположення, використовуючи датчики, наприклад, датчик виявлення і отримання лінійного прискорення, датчик виявлення і отримання зміни напрямку, і т. д. Місцеположення SET 110 може також періодично визначатися іншими способами. Місцеположення SET 110 може бути визначене (етап С), і відстань, пройдена SET 110, може бути оновлена (етап D). Пройдена відстань може бути визначена по-різному. У одному виконанні пройдена відстань може бути повною відстанню, отриманою за допомогою накопичення зростаючої відстані між послідовними місцеположеннями для SET 110, починаючи з останнього повідомлення. У цьому виконанні SET 110 може (i) визначати зростаючу відстань між його поточним місцеположенням і останнім місцеположенням, і (ii) підсумовувати цю зростаючу відстань з накопиченою відстанню для останнього місцеположення, щоб отримати накопичену відстань для поточного місцеположення. У іншому виконанні пройдена відстань може бути відстанню між поточним місцеположенням і місцеположенням останнього повідомлення, яке може бути початковим місцеположенням, якщо ніяке повідомлення не відсилали. У ще одному виконанні пройдена відстань може бути відстанню вздовж конкретного маршруту, наприклад, вздовж траєкторії від початкового місцеположеннядо місцеположення призначення або вздовж складнішого маршруту. Пройдена відстань може також бути визначена іншими способами. У одному виконанні SET 110 може перевіряти події активатора та ініціювати повідомлення звіту. У іншому виконанні H-SLP 130 може перевіряти події активатора та ініціювати повідомлення звіту. У загальному випадку будь-який відповідний об'єкт може бути призначений, щоб виконувати перевірку та ініціювати повідомлення звіту. Призначений об'єкт може бути забезпечений місцеположенням SET 110, параметрами активатора і/або іншою доречною інформацією. Для ясності велика частина опису нижче передбачає, що SET 110 є призначеним об'єктом. SET 110 може перевіряти, чи мала місце подія активатора, на основі відстані, пройденої SET 110, і заздалегідь заданої відстані (етап Е). Подія активатора може відбутися, якщо пройдена відстань перевищує заздалегідь задану відстань. У цьому випадку SET 110 може повідомити в H-SLP 130, що подія активатора відбулася (етап F). Повідомлення може також включати в себе поточне місцеположення SET 110, відстань, пройдену за допомогою SET 110, і/або іншу інформацію. H-SLP 130 може потім відіслати відповідь активатора, щоб повідомити агенту SUPL 140, що подія активатора відбулася (етап G). Відповідь може включати в себе деяку або всю інформацію, надану в повідомленні активатора з SET 110. Якщо подія активатора не відбулася, то етапи F і G можуть бути пропущені. Етапи C-G можуть бути призначені для одного циклу обробки. Додаткові цикли обробки можуть бути виконані аналогічним чином (етап Н). Кожний цикл обробки може включати в себе 5 UA 100800 C2 5 10 15 20 25 30 35 40 45 50 55 60 етапи, щоб визначити поточне місцеположення SET 110, визначити відстань, пройдену SET 110, і визначити, чи мала місце подія активатора. Подія активатора, повідомлена за допомогою SET 110, і відповідь активатора за допомогою H-SLP 130 можуть бути ініційовані, якщо подія активатора відбулася, і може бути пропущена в іншому випадку. Кінець еквідистантно активованого сеансу може бути досягнутий, наприклад, коли час зупинки досягнутий, коли досягнута заздалегідь задана кінцева точка шляху, і т. д. Після досягнення кінця еквідистантно активованого сеансу H-SLP 130 і SET 110 може перервати сеанс (етап I). Фіг. 3 показує структуру потоку 300 повідомлень для еквідистантно активованої послуги, використовуючи повідомлення SUPL. Агент SUPL 140 може бажати знати кожний раз, коли SET 110 перемістився на конкретну відстань від останнього повідомленого місцеположення SET 110. Агент SUPL 140 може відіслати повідомлення запиту відповіді місцеположення, активоване згідно з мобільним протоколом визначення місцеположення (MLP TLRR) до H-SLP 130, який може бути H-SLP, з яким агент SUPL 140 асоційований (етап А). Повідомлення MLP TLRR може включати в себе клієнтський ідентифікатор (ID) для агента SUPL 140 (клієнт-id), ідентифікаційну інформацію мобільної станції (мс-id) для цільового SET 110, індикацію запитаної еквідистантно активованої послуги, параметри активатора (наприклад, заздалегідь задана відстань, початковий час, час зупинки і т.д.), і т.д. Параметри активатора можуть використовуватися, щоб визначити події активатора для повідомлення за допомогою цільового SET 110. H-SLP 130 може аутентифікувати агента SUPL 140 і перевірити, чи авторизований агент SUPL для запитаної послуги визначення місцеположення, на основі клієнтського ID. H-SLP 130 може також застосувати конфіденційність абонента до агента SUPL 140 на основі ID мобільної станції. Для перевірки конфіденційності H-SLP 130 може верифікувати, чи дозволено агенту SUPL 140 або цьому типу агента SUPL запитувати інформацію місцеположення про SET 110 і чи може бути необхідним повідомляти SET 110 відносно цього запиту і дозволено приймати або відхиляти цей запит. H-SLP 130 може викликати еквідистантно активовану послугу тільки за згодою користувача SET 110, щоб гарантувати конфіденційність. Еквідистантно активована послуга може також динамічно брати до уваги модифікації параметрів настройки конфіденційності користувача SET. H-SLP 130 може потім шукати SET 110, верифікувати, що SET 110 в цей час не знаходиться в роумінгу, а також верифікувати, що SET 110 підтримує SUPL (етап В). H-SLP 130 може отримати інформацію маршруту для SET 110 і використати інформацію маршруту, щоб відіслати повідомлення в SET 110 (також етап В). H-SLP 130 може відіслати повідомлення SUPL INIT в SET 110, щоб ініціювати сеанс SUPL/визначення місцеположення для еквідистантно активованої послуги (етап З). Повідомлення SUPL INIT може включати в себе ID сеансу (сеанс-id), індикатор еквідистантно активованої послуги, запропонований спосіб позиціонування (pos-method) і/або іншу інформацію. ID сеансу може використовуватися, щоб ідентифікувати сеанс SUPL. SET 110 може прийняти повідомлення SUPL INIT від H-SLP 130 і може або приєднатися до мережі передачі даних, якщо SET 110 вже не приєднаний, або встановлювати з'єднання даних (етап D). SET 110 може оцінити правила повідомлення і слідувати відповідним діям. SET 110 може потім відіслати повідомлення SUPL TRIGGERED START, щоб почати еквідистантно активований сеанс з H-SLP 130. Це повідомлення може включати в себе ID сеансу, можливості SET 110, і т. д. Можливості SET можуть включати в себе способи позиціонування, що підтримуються SET 110, протоколи позиціонування, що підтримуються SET 110 (наприклад, Протокол LCS радіо-ресурсів (RRLP) в 3GPP, керування радіо-ресурсами (RRC) в 3GPP, Протокол позиціонування LTE (LPP), TIA-801, і т. д.), і/або іншу інформацію. H-SLP 130 може прийняти повідомлення SUPL TRIGGERED START і може вибрати спосіб позиціонування для використання для еквідистантно активованого сеансу, розглядаючи можливості SET, включені в прийняте повідомлення. H-SLP 130 може потім відіслати в SET 110 повідомлення SUPL TRIGGERED RESPONSE, яке може включати в себе ID сеансу, вибраний спосіб позиціонування (pos-method), параметри активатора, і т. д. (етап F). SET 110 і H-SLP 130 можуть звільнити безпечне IP з'єднання після етапу F. H-SLP 130 може відіслати повідомлення відповіді, що повідомляє MLP-активоване місцеположення (TLRA), щоб повідомити агенту SUPL 140, що еквідистантно активована послуга була прийнята (етап G). Етапи А-G є етапами встановлення для еквідистантно активованого сеансу. Інформація місцеположення для SET 110 може бути після цього повідомлена відповідно до параметрів активатора, наданих агентом SUPL 140 на етапі А, і відіслана в SET 110 на етапі F. SET 110 може брати участь в сеансі позиціонування з H-SLP 130, щоб отримати дані допомоги в основаному на SET режимі або визначити місцеположення SET 110 в режимі з асистуванням SET. SET 110 може відіслати повідомлення SUPL POS INIT, щоб ініціювати сеанс 6 UA 100800 C2 5 10 15 20 25 30 35 40 45 50 55 позиціонування з H-SLP 130 (етап Н). Це повідомлення може включати в себе ID сеансу, ID місцеположення (lid), можливості SET, запит про дані допомоги і/або іншу інформацію. H-SLP 130 може потім брати участь із SET 110 в сеансі SUPL POS (або сеансі позиціонування) (етап I). H-SLP 130 і SET 110 можуть обмінятися повідомленнями для вибраного протоколу позиціонування (наприклад, RRLP, RRC, LPP, або TIA-801), щоб забезпечити дані допомоги в SET 110 і/або обчислити оцінку місцеположення для SET 110. H-SLP 130 може відіслати оцінку місцеположення і/або іншу інформацію в повідомленні SUPL REPORT до SET 110 (етап J). Місцеположення SET 110 може бути визначене за допомогою SET 110 самим або з допомогою H-SLP 130 на етапах Н, I і J (етап K). Відстань, пройдена SET 110, може бути оновлена, наприклад, використовуючи будь-яку зі схем, описаних вище для обчислення пройденої відстані (етап L). SET 110 може порівняти пройдену відстань із заздалегідь заданою відстанню і визначити, чи перемістився він на заздалегідь задану відстань (етап M). Якщо SET 110 перемістився на заздалегідь задану відстань, і подія активатора відбулася, то SET 110 може відіслати повідомлення SUPL REPORT в H-SLP 130 (етап N). Це повідомлення може включати в себе індикацію, що подія активатора відбулася, і може також включати в себе поточне місцеположення SET 110, відстань, пройдену SET 110, і/або іншу інформацію. У відповідь на подію активатора H-SLP 130 може відіслати повідомлення MLP Активоване Повідомлення про Місцеположення (TLREP) агенту SUPL 140 (етап О). Це повідомлення може включати в себе ID запиту, індикацію, що подія активатора відбулася, поточне місцеположення SET 110, відстань, пройдену SET 110, дату і час для поточного місцеположення, спосіб позиціонування, що використовується для визначення поточного місцеположення, і/або іншу інформацію. Етапи N і О можуть бути пропущені, якщо подія активатора не відбулася. Етапи K-O є для одного циклу обробки. Додаткові цикли обробки можуть бути виконані аналогічним чином (етап Р). Кожний цикл обробки може включати в себе етапи, щоб визначити поточне місцеположення SET 110, визначити відстань, пройдену SET 110, і визначати, чи мала місце подія активатора. Повідомлення звіту може бути ініційоване, якщо подія активатора відбулася і може бути пропущене в іншому випадку. Кінець еквідистантно активованого сеансу може бути досягнутий, наприклад, коли час зупинки досягнутий, коли заздалегідь задана кінцева точка досягнута, і т. д. Після досягнення кінця еквідистантно активованого сеансу HSLP 130 і SET 110 можуть закінчити сеанс. H-SLP 130 може відіслати повідомлення SUPL END в SET 110 (етап Q), або SET 110 може відіслати повідомлення SUPL END в H-SLP 130 (не показано на ФІГ. 3). H-SLP 130 може також повідомити агента SUPL 140 про кінець сеансу. Альтернативно, кожний об'єкт може автономно визначити кінець сеансу і закінчити сеанс, не обмінюючись сигналізацією. Активована (за допомогою) «SET відносно SET» послуга може періодично визначати місцеположення цільового SET і місцеположення опорного SET і може повідомляти інформацію місцеположення, коли цільовий SET увійшов або залишив рухому географічну цільову зону, центровану в місцеположенні опорного SET. Агент SUPL може ініціювати активовану SET відносно SET послугу, щоб ідентифікувати цільовий і опорний термінали SET, і забезпечувати прийнятні параметри. Фіг. 4 показує географічну цільову зону 410 для активованої SET відносно SET послуги. Географічна цільова зона може бути центрована в місцеположенні опорного SET і може бути круговою зоною, визначеною радіусом r з місцеположення опорного SET. Географічна цільова зона може переміщатися синхронно з місцеположенням опорного SET. У загальному випадку географічна цільова зона може бути визначена будь-якої форми, наприклад, складнішим багатокутником. Географічна цільова зона може також бути (i) двомірною і визначена горизонтальним місцеположенням або (ii) тривимірною і визначена і горизонтальним місцеположенням і висотою. Наприклад, мати і дитина можуть знаходитися в торговому центрі. Мати може хотіти бути повідомленою кожний раз, коли дитина рухається поза зоною радіусом 30 ярдів навколо неї, що може називатися як сценарій "загублена дитина". Мати може нести опорний термінал, і дитина може нести цільовий термінал. Географічна цільова зона може бути визначена як кругова зона з радіусом r, центрованим в місцеположенні матері. Географічна цільова зона може слідувати за рухом матері, тобто, переміщатися з матір'ю. Кожний раз, коли дитина (або цільовий термінал) залишає географічну цільову зону навколо матері (наприклад, коли дитина рухається більше ніж на відстані в 30 ярдів від матері), агент SUPL може бути повідомлений. Агент SUPL може потім повідомити матір, що дитина покинула географічну цільову зону, наприклад, загубилася. Цей приклад може також підтримуватися, коли ролі терміналів повністю змінені, з матір'ю, що несе цільовий термінал, і дитиною, що несе опорний термінал. 7 UA 100800 C2 5 10 15 20 25 30 35 40 45 50 55 60 Фіг. 5 показує структуру потоку 500 повідомлень для активованої SET відносно SET послуги. Агент SUPL 140 може бажати знати місцеположення цільового SET 110 відносно рухомої географічної цільової зони, визначеної місцеположенням опорного SET 112, і може відіслати запит місцеположення з індикацією активатора SET відносно SET до H-SLP 130 (етап А). H-SLP 130 може потім зв'язатися з цільовим UE 110 і опорним SET 112, щоб встановити активований SET відносно SET сеанс (етапи В і С). У одному виконанні цільовий SET 110 може перевіряти події активатора та ініціювати повідомлення звіту. У іншому виконанні H-SLP 130 може перевіряти події активатора та ініціювати повідомлення звіту. У загальному випадку будь-який об'єкт може бути призначений, щоб виконувати перевірку та ініціювати повідомлення звіту. Призначений об'єкт може бути забезпечений місцеположенням терміналів SET 110 і 112, параметрами активатора і/або іншою доречною інформацією. Для ясності велика частина опису нижче передбачає, що цільовий SET 110 є призначеним об'єктом. Місцеположення опорного SET 112 може бути визначене, наприклад, в основаному на SET режимі або режимі з асистуванням SET (етап D). Місцеположення опорного SET 112 може бути надане в H-SLP 130 (етап Е), який може відправити це місцеположення в цільовий SET 110 (етап F). Альтернативно, місцеположення опорного SET 112 може бути надане безпосередньо опорним SET 112 в цільовий SET 110, не проходячи через H-SLP 130 (як показано пунктирною лінією на ФІГ. 5). Місцеположення опорного SET 110 може також бути визначене, наприклад, в основаному на SET режимі або режимі з асистуванням SET (етап G). Цільовий SET 110 може перевіряти, чи мала місце подія активатора, на основі місцеположень терміналів SET 110 і 112 і параметрах активатора, що визначають географічну цільову зону (етап Н). Подія активатора може відбутися, якщо цільовий SET 110 знаходиться або перемістився всередині або зовні географічної цільової зони. У цьому випадку цільовий SET 110 може повідомити в H-SLP 130, що подія активатора відбулася (етап I). Повідомлення може включати в себе поточне місцеположення цільового SET 110, поточне місцеположення опорного SET 112, місцеположення цільового SET 110 відносно опорного SET 112 (наприклад, в 50 метрах на схід) і/або іншу інформацію. H-SLP 130 може потім відіслати відповідь активатора, щоб інформувати агента SUPL 140, що подія активатора відбулася (етап J). Відповідь може включати в себе деяку або всю інформацію, надану в повідомленні активатора із SET 110. Якщо подія активатора не відбулася, то етапи I і J можуть бути пропущені. Етапи D-J можуть бути для одного циклу обробки. Додаткові цикли обробки можуть бути виконані аналогічним чином (етап K). Кожний цикл обробки може включати в себе етапи, щоб визначити поточне місцеположення опорного SET 112, визначити поточне місцеположення цільового SET 110 і визначити, чи мала місце подія активатора. Місцеположення опорного SET 112 може бути визначене з тією ж самою або відмінною частотою, як місцеположення цільового SET 110. Подія активатора, повідомлена в звіті цільовим SET 110, і відповідь активатора за допомогою H-SLP 130 можуть бути ініційовані, якщо подія активатора відбулася і може бути пропущена в іншому випадку. Кінець активованого SET відносно SET сеансу може бути досягнутий, наприклад, коли час зупинки досягнутий, і т. д. Після досягнення кінця сеансу H-SLP 130 і термінали SET 110 і 112 можуть закінчити сеанс (етапи L і M). У іншому виконанні замість отримання місцеположення опорного і цільового терміналів SET на етапах D і G на Фіг. 5, будь-який SET може визначити своє місцеположення відносно іншого SET періодично на цих етапах. Наприклад, на етапі G цільовий SET 110 може відіслати сигнал (наприклад, радіосигнал або інфрачервоний сигнал) безпосередньо на опорний SET 112, який може повернути сигнал відповіді назад в SET 110. SET 110 може виміряти повний час відповіді і відняти внутрішню затримку в SET 112, яку SET 112 може включати в свій сигнал відповіді до SET 110, або SET 110 може визначити іншим засобом. SET 110 може отримати затримку поширення сигналу передачі туди і назад, отже, відстань між собою і SET 112. Ця відстань може потім використовуватися, щоб оцінити умову активатора. У ще одному виконанні початкові місцеположення обох терміналів SET 110 і 112 можуть бути отримані на етапах D і G, і подальші місцеположення можуть бути отримані, використовуючи місцеположення кожного SET відносно цих початкових місцеположень. Відносні місцеположення можуть також бути отримані, використовуючи датчики в кожному SET, які можуть вимагати менше ресурсів сигналізації і обробки для отримання, і можуть бути отримані в коротших інтервалах. Фіг. 6 показує структуру потоку 600 повідомлень для активованої SET відносно SET послуги, використовуючи повідомлення SUPL. Агент SUPL 140 може бажати знати місцеположення цільового SET 110 відносно рухомої географічної цільової зони, визначеної місцеположенням опорного SET 112, і може відіслати повідомлення MLP TLRR в H-SLP 130 (етап А). 8 UA 100800 C2 5 10 15 20 25 30 35 40 45 50 55 60 Повідомлення MLP TLRR може включати в себе ідентифікаційну інформацію агента SUPL (id клієнта, client-id), ідентифікаційну інформацію цільового SET (id цільовий мс, targed ms-id), ідентифікаційну інформацію опорного SET (ref ms-id), індикацію запитуваної активованої SET відносно SET послуги, параметри активатора і т. д. Параметри активатора можуть включати в себе інформацію відносно географічної цільової зони навколо опорного SET (наприклад, радіус r), інформацію активатора події (наприклад, всередині, зовні, вхід або вихід з цільової зони), тривалість сеансу (наприклад, час початку, час зупинки і т. д.) і/або іншу інформацію, яка може використовуватися, щоб визначити події активатора для повідомлення у вигляді звіту. H-SLP 130 може аутентифікувати і авторизувати агента SUPL 140 для активованої SET відносно SET послуги. H-SLP 130 може також виконати повідомлення і/або перевірку з терміналами SET 110 і 112. Наприклад, H-SLP 130 може отримати схвалення від користувача опорного SET 112, щоб дозволити визначити місцеположення опорного SET 112 і, можливо, спільно використати з цільовим SET 110, H-SLP 130, і/або агентом SUPL 140. H-SLP 130 може також отримати схвалення від користувача цільового SET 110, щоб дозволити визначити місцеположення цільового SET 110 і, можливо, спільно використовувати з опорним SET 112, HSLP 130, і/або агентом SUPL 140. Активована SET відносно SET послуга може також динамічно брати до уваги модифікації параметрів настройки конфіденційності кожного користувача SET. H-SLP 130 може шукати термінали SET 110 і 112 і отримувати інформацію маршруту для цих терміналів SET (етап В). H-SLP 130 може відіслати повідомлення SUPL INIT на опорний SET 112, щоб ініціювати сеанс SUPL для активованої SET відносно SET послуги (етап С). SET 112 може прийняти повідомлення SUPL INIT і може приєднатися сам або встановити з'єднання даних (етап D). SET 112 може оцінити правила повідомлення і слідувати відповідним діям. SET 112 може потім відіслати повідомлення SUPL TRIGGERED START, щоб почати активований SET відносно SET сеанс з H-SLP 130 (етап Е). H-SLP 130 може прийняти повідомлення SUPL TRIGGERED START від SET 112 і може вибрати спосіб позиціонування для використання для SET 112. H-SLP 130 може потім відіслати в SET 112 повідомлення SUPL TRIGGERED RESPONSE, яке може включати в себе ID сеансу, вибраний спосіб позиціонування, параметри активатора і т. д. (етап F). H-SLP 130 може аналогічно виконати етапи C-F для цільового SET 110 (етап G). H-SLP 130 може відіслати повідомлення MLP TLRA, щоб інформувати агента SUPL 140, що активована SET відносно SET послуга була прийнята (етап Н). H-SLP 130, цільовий SET 110 і опорний SET 112 можуть після цього спільно діяти, щоб виявити виникнення події активатора. Місцеположення кожного SET може бути періодично визначене (наприклад, кожні X секунд) під час сеансу. У одному виконанні SET може автономно робити вимірювання і визначати своє місцеположення. У іншому виконанні SET може брати участь на сеансі позиціонування з H-SLP 130, щоб визначити своє місцеположення. У загальному випадку місцеположення кожного SET може бути визначене виключно цим SET, за допомогою SET з допомогою від H-SLP 130, H-SLP 130 з допомогою від SET і т. д. Опорний SET 112 може виконувати етапи I, J і K, по мірі необхідності, щоб отримати дані допомоги з H-SLP 130 або визначити своє місцеположення для режиму з асистуванням SET. Аналогічно, цільовий SET 110 може виконувати етапи I, J і K, по мірі необхідності, щоб отримати дані допомоги з HSLP 130 або визначити своє місцеположення для режиму з асистуванням SET. Етапи I, J і K можуть бути виконані, як описано вище для етапів Н, I і J відповідно, на ФІГ. 3. У одному виконанні цільовий SET 110 може перевіряти подію активатора та ініціювати повідомлення звіту. У іншому виконанні H-SLP 130 може перевіряти подію активатора та ініціювати повідомлення звіту. У ще одному виконанні опорний SET 112 може перевіряти подію активатора та ініціювати повідомлення звіту. У загальному випадку будь-який об'єкт або будьяка комбінація об'єктів можуть бути призначені, щоб виконувати перевірку та ініціювати повідомлення звіту. Об'єкт, що визначається, або об'єкти можуть бути забезпечені поточними місцеположеннями терміналів SET 110 і 112 і параметрами активатора. Для ясності опис нижче передбачає, що цільовий SET 110 перевіряє подію активатора та ініціює повідомлення звіту. Опорний SET 112 може визначити своє місцеположення (етап L) і може відіслати повідомлення SUPL REPORT з його поточним місцеположенням до H-SLP 130 (етап M). Для механізму витягання інформації цільовий SET 110 може відіслати повідомлення SUPL POSITION REQUEST в H-SLP 130, щоб запитати поточне місцеположення опорного SET (етап N). У відповідь H-SLP 130 може відправити поточне місцеположення опорного SET 112 в повідомленні SUPL REPORT на цільовий SET 110 (етап О). Механізм витягання інформації може дозволити цільовому SET 110 запитати інформацію місцеположення зручним для нього способом, наприклад, коли цільовий SET 110 має відкрите з'єднання. Для механізму поширення інформації H-SLP 130 може відправляти місцеположення опорного SET 112 кожний раз, коли вона прийнята з SET 112. У цьому випадку етап О може мати місце, але етап N може 9 UA 100800 C2 5 10 15 20 25 30 35 40 45 50 55 60 бути пропущений. Механізм поширення інформації може дозволити H-SLP 130 забезпечувати місцеположення опорного SET кожний раз, коли вона доступна, без потреби в тому, щоб опорний SET 110 періодично запитував її. Опорний SET 112 може також відіслати своє поточне місцеположення безпосередньо на цільовий SET 110, не взаємодіючи з H-SLP 130. Цільовий SET 110 може визначити своє місцеположення (етап Р). Цільовий SET 110 може порівняти своє поточне місцеположення з поточним місцеположенням опорного SET 112 і може визначити, чи знаходиться він в межах або зовні чи перемістився в або з географічної цільової зони, визначеної поточним місцеположенням опорного SET 112 (етап Q). Якщо подія активатора відбулася, то цільовий SET 110 може відіслати повідомлення SUPL REPORT з індикацією активатора події і можливо його поточного місцеположення і/або місцеположення опорного SET 112 до H-SLP 130 (етап R). H-SLP 130 може потім відіслати агенту SUPL 140 MLP TLREP повідомлення, яке може включати в себе ID запиту, індикацію активатора події, і можливо іншу інформацію, таку як місцеположення цільового SET 110, місцеположення опорного SET 112, дата і час для кожного місцеположення, спосіб позиціонування, що використовується для визначення кожного місцеположення, і/або іншу інформацію (етап S). Цільовий SET 110 може бути інформований про подію активатора відносно місцеположення опорного SET 112, наприклад, активовану цільовим SET 110. Опорний SET 112 може бути також інформований про активовану подію відносно його власної позиції, наприклад, активовану цільовим SET 110. Етапи L-S призначені для одного циклу обробки. Додаткові цикли обробки можуть бути виконані аналогічним чином (етап Т). Кожний цикл обробки може включати в себе етапи, щоб визначити поточне місцеположення кожного SET і визначити, чи мала місце подія активатора. Повідомлення може бути ініційоване (наприклад, на етапах R і S), якщо подія активатора відбулася і може бути пропущене в іншому випадку. Кінець активованого SET відносно SET сеансу може бути досягнутий, наприклад, коли час зупинки досягнутий і т. д. Після досягнення кінця сеансу H-SLP 130, цільовий SET 110 і опорний SET 112 можуть закінчити сеанс. H-SLP 130 може відіслати повідомлення SUPL END в кожний SET (етапи U і V). SET може також відіслати повідомлення SUPL END. H-SLP 130 може також повідомити агента SUPL 140 про кінець сеансу. Активована SET відносно SET послуга може використовуватися, щоб періодично контролювати рух цільового термінала відносно географічної цільової зони з опорним терміналом як його центр. Географічна цільова зона може бути визначена відносно опорного термінала (а не цільового термінала, як має місце для інших активованих послуг), і може переміщатися в синхронізмі з опорним терміналом. Повідомлення може бути відіслане третій стороні (наприклад, агенту SUPL 140) кожний раз, коли цільовий термінал знаходиться в межах або зовні, входить або виходить з географічної цільової зони. Третя сторона може відіслати запит місцеположення в сервер визначення місцеположення (наприклад, H-SLP 130). Сервер визначення місцеположення може почати процедуру визначення позиції як з цільовим терміналом так і з опорним. Місцеположення опорного термінала може періодично визначатися і порівнюватися з місцеположенням цільового термінала, щоб дозволити виявлення цільового термінала, що знаходиться всередині або зовні, що входить або виходить з географічної цільової зони навколо опорного термінала. Кожний раз, коли ця подія активатора виявлена, сервер визначення місцеположення може повідомити клієнта місцеположення і можливо цільовий термінал і/або опорний термінал. Активована швидкістю послуга може періодично визначати, чи досягла швидкість цільового SET заздалегідь заданої швидкості (тобто, рівня швидкості) і може повідомити цю швидкість, коли подія активатора виявлена. Агент SUPL може ініціювати активовану швидкістю послугу, ідентифікувати цільовий SET і забезпечувати відповідні параметри. Швидкість може включати в себе швидкість і/або курс. Швидкість може вказувати, як швидко SET переміщається, і курс може вказувати напрямок, в якому SET переміщається. У загальному випадку критерій активатора може бути визначений на основі тільки швидкості, або тільки курсу або і швидкості і курсу. Наприклад, критерій активатора може бути визначений, щоб відіслати звіт, (i) коли грузовик досягає швидкості 70 миль на годину, або (ii) коли грузовик прямує на північ, або (iii) коли грузовик прямує на північ зі швидкістю більше 70 миль на годину. Критерій активатора може також бути визначений для збільшення і/або зменшення швидкості. Наприклад, повідомлення може бути відіслане, коли грузовик досягає 70 миль на годину (починаючи зі стоп-сигналу). Грузовик може прискоритися далі і досягнути 90 миль на годину. Інше повідомлення може бути відіслане, коли грузовик сповільнюється до 70 миль на годину. Альтернативно, інше повідомлення може бути відіслане, якщо грузовик сповільнюється нижче нижчого рівня (наприклад, 65 миль на годину) і потім перевищує 70 миль на годину. У 10 UA 100800 C2 5 10 15 20 25 30 35 40 45 50 55 60 загальному випадку швидкість, що використовується для послуги, активованої швидкістю, може належати тільки до швидкості, або тільки до курсу, або і швидкості і курсу. Різні критерії активатора можуть також використовуватися для послуги, активованої швидкістю. Активатор швидкості може бути визначений по-різному. У одному виконанні активатор швидкості може відбутися, коли швидкість цільового SET спочатку знижується нижче нижчого рівня і після цього досягає або перевищує заздалегідь задану швидкість. Нижчий рівень може бути визначений на основі заздалегідь заданої швидкості, наприклад, може бути деяка межа нижче заздалегідь заданої швидкості. Наприклад, грузовик може почати рух на світлофорі і після цього досягнути заздалегідь заданої швидкості 70 миль на годину, яка може бути визначена на основі обмеження швидкості 65 миль на годину плюс допуск 5 миль на годину. Активатор швидкості може відбутися, коли грузовик спочатку досягає 70 миль на годину, і ніякий активатор швидкості може не мати місця, поки грузовик продовжує прискорюватися вище нижчого рівня. Нижчий рівень може становити 60 миль на годину, який може бути визначений на основі обмеження швидкості в 65 миль на годину мінус допуск 5 миль на годину. Інший активатор швидкості може відбутися, якщо грузовик сповільнюється нижче нижчого рівня, 60 миль на годину, і потім досягає або перевищує заздалегідь задану швидкість 70 миль на годину. У іншому виконанні активатор швидкості може відбутися, якщо швидкість цільового SET перевищує заздалегідь задану швидкість, але може бути обмежений найбільше одним активатором швидкості в кожному заздалегідь заданому часовому інтервалі. Для прикладу вище, активатор швидкості може відбуватися кожний заздалегідь заданий часовий інтервал в 5 хвилин, в якому грузовик досягає або перевищує заздалегідь задану швидкість. Активатор швидкості може також бути визначений іншими способами. Фіг. 7 показує структуру потоку 700 повідомлень для активованої швидкістю послуги, використовуючи повідомлення SUPL. Агент SUPL 140 може бажати знати кожний раз, коли швидкість цільового SET 110 досягла цільової швидкості, і може відіслати повідомлення MLP TLRR в H-SLP 130 (етап А). Повідомлення MLP TLRR може включати в себе ідентифікаційну інформацію агента SUPL, ідентифікаційну інформацію цільового SET, індикацію запитаної активованої швидкістю послуги, параметри активатора і т. д. Параметри активатора можуть включати в себе цільову швидкість, початковий час, час зупинки і т. д. H-SLP 130 може аутентифікувати і авторизувати агента SUPL 140 для послуги, активованої швидкістю. H-SLP 130 може також виконати повідомлення і/або перевірку з цільовим SET 110. Активована швидкістю послуга може також динамічно враховувати модифікації параметрів настройки конфіденційності користувача цільового SET. H-SLP 130 може шукати SET 110 і отримувати інформацію маршруту для SET (етап В). HSLP 130 може відіслати повідомлення SUPL INIT в SET 110, щоб ініціювати сеанс SUPL для послуги, активованої швидкістю (етап С). SET 110 може прийняти повідомлення SUPL INIT і приєднатися або встановити з'єднання передачі даних (етап D). SET 110 може оцінити правила повідомлення і слідувати відповідним діям. SET 110 може потім відіслати повідомлення SUPL TRIGGERED START, щоб ініціювати активований швидкістю сеанс з H-SLP 130 (етап Е). H-SLP 130 може прийняти повідомлення SUPL TRIGGERED START, вибирати спосіб позиціонування для використання для SET 110, і повернути повідомлення SUPL TRIGGERED RESPONSE, яке може включати в себе ID сеансу, вибраний спосіб позиціонування, параметри активатора і т. д. (етап F). H-SLP 130 може відіслати MLP TLRA повідомлення, щоб повідомити агенту SUPL 140, що активована швидкістю послуга була прийнята (етап G). H-SLP 130 і цільовий SET 110 можуть після цього діяти спільно, щоб виявити виникнення активованої події. Швидкість SET 110 може періодично визначатися (наприклад, кожні X секунд) під час сеансу. У одному виконанні SET може автономно зробити вимірювання і визначити свою швидкість. У іншому виконанні SET може взаємодіяти з H-SLP 130, щоб визначити свою швидкість. У загальному випадку, швидкість SET 110 може бути визначена виключно за допомогою SET 110, SET 110 з допомогою від H-SLP 130, H-SLP 130 з допомогою від SET 110 і т. д. Цільовий SET 110 може виконувати етапи Н, I і J по мірі необхідності, отримати дані допомоги з H-SLP 130 або визначити свою швидкість для режиму з асистуванням SET. У одному виконанні цільовий SET 110 може перевіряти подію активатора та ініціювати повідомлення звіту. SET 110 може визначити свою швидкість (етап K). SET 110 може порівняти свою поточну швидкість з цільовою швидкістю і може визначити, чи перевищила поточна швидкість цільову швидкість (етап L). Якщо подія активатора відбулася, то цільовий SET 110 може відіслати повідомлення SUPL REPORT з індикацією активованої події і, можливо, своєю швидкістю, до H-SLP 130 (етап M). H-SLP 130 може потім відіслати агенту SUPL 140 повідомлення MLP TLREP, яке може включати в себе ID запиту, індикацію активатора події, швидкість SET 110, місцеположення SET 110 і т. д. (етап N). У іншому виконанні H-SLP 130 11 UA 100800 C2 5 10 15 20 25 30 35 40 45 50 55 60 може перевіряти подію активатора та ініціювати повідомлення звіту. У загальному випадку, будь-який об'єкт може бути призначений, щоб виконувати перевірку та ініціювати повідомлення звіту. Призначений об'єкт може бути забезпечений швидкістю SET 110 і параметрами активатора. Етапи K-N призначені для одного циклу обробки. Додаткові цикли обробки можуть бути виконані аналогічним чином (етап О). Кожний цикл обробки може включати в себе етапи, щоб визначити швидкість SET 110 і визначити, чи мала місце подія активатора. Повідомлення звіту може бути ініційоване, якщо подія активатора відбулася і може бути пропущене в іншому випадку. Кінець активованого швидкістю сеансу може бути досягнутий, наприклад, коли час зупинки досягнутий, і т. д. Після досягнення кінця активованого швидкістю сеансу H-SLP 130 і SET 110 можуть закінчити сеанс. H-SLP 130 може відіслати повідомлення SUPL END в SET 110 (етап Р). H-SLP 130 може також повідомити агента SUPL 140 про кінець сеансу. Активована швидкістю послуга може використовуватися, щоб періодично контролювати цільовий термінал і відсилати повідомлення третій стороні (наприклад, агент SUPL 140) кожний раз, коли швидкість цільового термінала досягає заздалегідь заданого рівня. Третя сторона може відіслати запит місцеположення в сервер визначення місцеположення (наприклад, H-SLP 130). Сервер визначення місцеположення спільно з цільовим терміналом може почати процедуру визначення позиції і швидкості. Ця процедура може врахувати виявлення швидкості термінала, що перевищує заздалегідь заданий рівень. Кожний раз, коли ця подія активатора виявлена, сервер визначення місцеположення може повідомити місцеположення клієнту. Ця послуга може використовуватися, наприклад, центром операцій автотранспортної компанії, яка може хотіти знати кожний раз, коли їх грузовики перевищують 70 миль на годину. Ця послуга може також використовуватися страховою компанією, щоб верифікувати, що її страхувальники звичайно дотримуються обмежень локальної швидкості, наприклад, що може потім дати право страхувальнику знижувати страховий внесок. Активована комбінацією T-D-V послуга може підтримувати події активатора, визначені на основі комбінації минулого часу з моменту останнього повідомлення, відстані, пройденої, починаючи з останнього повідомлення, і досягнутої максимальної швидкості, починаючи з останнього повідомлення. Активована комбінацією T-D-V послуга може також підтримувати інші комбінації минулого часу, пройденої відстані, максимальної швидкості і/або інших параметрів. Наприклад, активатор комбінації T-D-V (або умова активатора) може бути визначений на основі однієї з наступних функцій часу, відстані і швидкостей: f (Т) І/АБО g (D) І/АБО h(V), Рівн. (1) або [f1(Т) І/АБО g (D)] І/АБО [f2 (Т) І/АБО h(V)], Рівн. (2) де Т, D і V є поточними значеннями для минулого часу, пройденої відстані, і максимальної швидкості, починаючи з останнього повідомлення відповідно, f (Т) вирази (наприклад, Булеві вирази) для активатора часу, g (D) є виразом (наприклад, Булеві вирази) для активатора відстані, h (V) вирази (наприклад, Булеві вирази) для активатора швидкості, "І" означає операцію логічного І, і "АБО" означає операцію логічного АБО. Булевий вираз може повернути результат «істина» або «неправда» на основі функції його вхідних параметрів. Як приклад, булевий вираз для пройденої відстані, може бути визначений як g (D)=(D≥D1), де D1 - заздалегідь задана відстань. Вираз може бути істинним, якщо пройдена відстань D дорівнює або більша, заздалегідь заданої відстані D1, і може бути помилковим інакше. f1(Т) і f2(Т) можуть бути двома булевими виразами для активатора часу, задані за допомогою fi(Т)=(Т≥Ti), для i=1 або 2, де T1 і T2 - два заздалегідь задані значення для минулого часу. Вирази для активатора швидкості можуть бути визначені аналогічним чином. Як тільки будь-яка умова активатора відбувається, вона може залишатися дійсною до наступного повідомлення. Це може перешкоджати появі активатора і потім подальшому зникненню, поки нове повідомлення не буде відіслане. Наприклад, центр керування рухом може потребувати оновлення про рух своїх грузовиків з цікавістю в повідомленнях кожний раз, коли грузовик перемістився на 10 миль (D1=10 миль), починаючи з останнього повідомлення, але не більше одного повідомлення для кожного грузовика кожну годину (T1=60 хвилин). Центр може також хотіти бути повідомленим негайно, якщо грузовик досягає 75 миль на годину (V1=75 миль на годину). Комбінована функція активатора може бути визначена таким чином: [(Т≥60 хвилин) І (D≥10 миль)] АБО (V≥75 миль на годину), де Т - час, що минув з того моменту, як відіслали останнє повідомлення, 12 UA 100800 C2 5 10 15 20 25 30 35 40 45 50 55 60 D - пройдена відстань з моменту останнього повідомлення, і V є максимальною швидкістю з моменту останнього повідомлення. Пройдена відстань D може бути обчислена як (i) сума зростаючих відстаней між вимірюваннями місцеположення або (ii) відстань до визначення місцеположення в останньому повідомленні. Наприклад, змінні Т, D для випадку (i) і V можуть все зростаючими функціями часу. Щоб уникнути генерування надмірних повідомлень звіту для прискорення водіїв, центр може потребувати не більше одного повідомлення про швидкість кожні 10 хвилин (T2=10 хвилин). Комбінована функція активатора може тоді бути визначена таким чином: [(Т≥60 хвилин) І (D≥10 миль)] АБО [(Т≥10 хвилин) І (V≥75 миль на годину)]. Як показано в рівнянні вище, різні заздалегідь задані значення часу можуть використовуватися з різними заздалегідь заданими значеннями для D і V. У одному виконанні, щоб забезпечити велику гнучкість для активованої комбінацією T-D-V послуги, Булеві вирази вище (наприклад, f(Т), g(D) і (V)) можуть включати в себе або можуть залежати від поточного місцеположення SET, набору місцеположень SET, починаючи з останнього повідомлення звіту, поточного часу або періоду часу, починаючи з останнього повідомлення звіту і т. д. Це може використовуватися, щоб встановити різні заздалегідь задані значення для пройденої відстані, максимальної швидкості і часу до наступного повідомлення звіту. Наприклад, автотранспортна компанія може регулювати заздалегідь задану максимальну швидкість згідно з переважаючим (наприклад, максимальним) обмеженням швидкості для місцеположень, пройдених з останнього повідомлення звіту. Компанія може також регулювати заздалегідь задану відстань, пройдену згідно з типом маршруту, наприклад, використовуючи вищу заздалегідь задану відстань для грузовика, що їде вздовж головного шосе. Компанія може також регулювати заздалегідь заданий часовий інтервал згідно з часом дня, наприклад, використовуючи менший інтервал протягом зайнятих періодів подорожі протягом дня і довший інтервал протягом менш зайнятих періодів, таких як вечір і ніч. Фіг. 8 показує структуру потоку 800 повідомлень для активованої комбінацією T-D-V послуги, використовуючи повідомлення SUPL. Агент SUPL 140 може бажати знати місцеположення і/або інформацію швидкості для цільового SET 110 і може відіслати повідомлення MLP TLRR в HSLP 130 (етап А). Повідомлення MLP TLRR може включати в себе ідентифікаційну інформацію агента SUPL, ідентифікаційну інформацію цільового SET, індикацію запитуваної активованої комбінацією T-D-V послуги, параметри активатора і т. д. Параметри активатора можуть включати в себе Т, D і/або V параметри, бажану комбіновану функцію активатора, наприклад, [(Т≥T1) І (D≥D1)) АБО (V≥V1)]), час початку, час зупинки і т. д. H-SLP 130 може аутентифікувати і авторизувати агента SUPL 140 для послуги, активованої комбінацією T-D-V. H-SLP 130 може також виконати повідомлення і/або перевірку з цільовим SET 110. Активована комбінацією T-DV послуга може також динамічно брати до уваги модифікації параметрів настройки конфіденційності користувача цільового SET. H-SLP 130 може шукати SET 110 і отримати інформацію маршруту для SET (етап В). H-SLP 130 може відіслати повідомлення SUPL INIT в SET 110, щоб ініціювати сеанс SUPL для послуги, активованої комбінацією T-D-V (етап С). SET 110 може прийняти повідомлення SUPL INIT і приєднатися або встановити з'єднання передачі даних (етап D). SET 110 може оцінити правила повідомлення і слідувати відповідним діям. SET 110 може потім відіслати повідомлення SUPL TRIGGERED START, щоб ініціювати активований комбінацією T-D-V сеанс з H-SLP 130 (етап Е). H-SLP 130 може прийняти повідомлення SUPL TRIGGERED START, вибрати спосіб позиціонування, щоб використати для SET 110, і повернути повідомлення SUPL TRIGGERED RESPONSE, яке може включати в себе ID сеансу, вибраний спосіб позиціонування, параметри активатора і т. д. (етап F). H-SLP 130 може відіслати MLP TLRA повідомлення, щоб повідомити агенту SUPL 140, що активована комбінацією T-D-V послуга була прийнята (етап G). Цільовий SET 110 може виконувати етапи Н, I і J, по мірі необхідності, щоб отримати дані допомоги з H-SLP 130, або визначити своє місцеположення і/або швидкість для режиму з асистуванням SET. H-SLP 130 і цільовий SET 110 можуть спільно діяти, щоб виявити виникнення активованої події. Місцеположення і/або швидкість SET 110 можуть періодично визначатися (наприклад, кожні X секунд) під час сеансу. У одному виконанні SET 110 може автономно зробити вимірювання і визначити своє місцеположення і/або швидкість (етап K). У іншому виконанні SET 110 може взаємодіяти з H-SLP 130, щоб визначити своє місцеположення і/або швидкість (наприклад, використовуючи етапи Н, I і J на ФІГ. 8). У загальному випадку, місцеположення і/або швидкість SET 110 можуть бути визначені виключно за допомогою SET 110, SET 110 з допомогою від H-SLP 130, H-SLP 130 з допомогою від SET 110 і т. д. 13 UA 100800 C2 5 10 15 20 25 30 35 40 45 50 55 60 У одному виконанні цільовий SET 110 може перевіряти подію активатора та ініціювати повідомлення звіту. SET 110 може визначити поточні Т, D і V значення і може логічно об'єднати ці значення відповідно до комбінованої функції активатора, щоб визначити, чи мала місце подія активатора (етап L). Якщо подія активатора відбулася, то цільовий SET 110 може відіслати повідомлення SUPL REPORT з індикацією активатора події і можливо його місцеположенням і/або швидкістю до H-SLP 130 (етап M). У іншому виконанні H-SLP 130 може перевіряти подію активатора та ініціювати повідомлення звіту. У будь-якому випадку у відповідь на подію активатора H-SLP 130 може відіслати агенту SUPL 140 повідомлення MLP TLREP, яке може включати в себе ID запиту, індикацію активатора події, місцеположення і/або швидкість SET 110, умови для активатора, які мали місце, і/або іншу інформацію (етап N). Етапи K-N призначені для одного циклу обробки. Додаткові цикли обробки можуть бути виконані аналогічним чином (етап О). Кожний цикл обробки може включати в себе етапи, щоб визначити місцеположення, і/або швидкість SET 110, щоб оновити відстань, пройдену SET 110, і визначити, чи мала місце подія активатора. Повідомлення може бути ініційоване, якщо подія активатора відбулася і може бути пропущене в іншому випадку. Після досягнення кінця активованого комбінацією T-D-V сеансу (наприклад, коли досягнутий час зупинки), H-SLP 130 і SET 110 можуть закінчити сеанс. H-SLP 130 може відіслати повідомлення SUPL END в SET 110 (етап Р). H-SLP 130 може також повідомити агента SUPL 140 про кінець сеансу. Активована комбінацією T-D-V послуга може використовуватися, щоб періодично контролювати цільовий термінал і відсилати повідомлення третій стороні (наприклад, агент SUPL 140) кожний раз, коли подія активатора, на основі часу Т, відстані D і/або швидкості V, відбувається. Третя сторона може відіслати запит місцеположення в сервер визначення місцеположення (наприклад, H-SLP 130). Сервер визначення місцеположення і цільовий термінал можуть діяти спільно, щоб виявити виникнення активованої події, основаної на місцеположенні і/або швидкості термінала. Кожний раз, коли подія активатора виявлена, сервер визначення місцеположення може повідомити клієнта місцеположення. У іншому аспекті послуга швидкості SET відносно SET може дозволити запит SET, щоб отримати абсолютну або відносну швидкість одного або більше цільових терміналів SET на основі, що продовжується, (наприклад, періодично, однократно і т. д.) під час сеансу швидкості SET відносно SET. Агент SUPL може постійно знаходитися в SET, що запитує, і може запитати швидкість цільового SET. Кожний SET може бути здатним виконати процедуру позиціонування з H-SLP і/або самостійно. Процедура позиціонування може надати інформацію місцеположення, яка може включати в себе місцеположення і/або швидкість SET. Фіг. 9 показує структуру потоку 900 повідомлень для швидкості SET відносно SET послуги, використовуючи повідомлення SUPL. Агент SUPL 144 в SET 114, що запитує, може бажати знати швидкість цільового SET 110. Оскільки агент SUPL 144 постійно знаходиться в SET 114, послуга, ініційована SET, може використовуватися, і агент SUPL 144 може внутрішньо запитувати SET 114, щоб ініціювати послугу швидкості SET відносно SET (етап А). SET 114, що запитує, може потім обмінюватися з H-SLP 130, щоб встановити активований ініційований SET сеанс (етап В). Встановлення сеансу на етапі В може включати в себе (i) посилання за допомогою SET 114 повідомлення SUPL TRIGGERED START до H-SLP 130 і (ii) повернення за допомогою H-SLP 130 повідомлення SUPL TRIGGERED RESPONSE до SET 114. Повідомлення SUPL TRIGGERED START може вказати для SET послугу швидкості SET відносно SET, яку запитують, і може також включати в себе інформацію, таку як ідентифікаційна інформація SET, що запитує, ідентифікаційну інформацію цільового SET, індикацію того, відносну чи абсолютну швидкість запитують, час початку і час зупинки сеансу, кількість прив'язок, інтервал між прив'язками і т. д. H-SLP 130 може аутентифікувати і авторизувати SET 114 для послуги швидкості SET відносно SET. Услід за встановленням сеансу на етапі В, SET 114 може повідомити запит внутрішньо агенту SUPL 144 і може підтвердити, що запитана послуга буде виконана (етап С). H-SLP 130 може встановити сеанс місцеположення з цільовим SET 110 (етапи D до Н). Це може включати в себе повідомлення і/або перевірку з SET 110. H-SLP 130 може спільно працювати із SET 114, що запитує, і/або цільовим SET 110, щоб визначити швидкість цільового SET 110, визначити швидкість опорного SET 114, забезпечити допомогу на цільовий SET 110, і/або забезпечити допомогу опорному SET 114 під час сеансу. HSLP 130 може також бути залучений до спільного використання швидкості цільового SET 110 із SET 114, що запитує, і/або швидкості SET 114, що запитує, з цільовим SET 110 під час сеансу. Цільовий SET 110 може виконувати етапи I, J і K, по мірі необхідності, отримувати дані допомоги з H-SLP 130 або визначати свою швидкість для режиму з асистуванням SET. Аналогічно, опорний SET 114 може виконувати етапи I, J і K, по мірі необхідності, отримувати дані допомоги з H-SLP 130 або визначати свою швидкість. Цільовий SET 110 може визначити 14 UA 100800 C2 5 10 15 20 25 30 35 40 45 50 55 60 свою швидкість (етап L) і може відіслати повідомлення SUPL REPORT зі своєю швидкістю до HSLP 130 (етап M). SET 114, що запитує, може відіслати повідомлення SUPL POSITION REQUEST в H-SLP 130, щоб запитати швидкість цільового SET 110 (етап N). У відповідь H-SLP 130 може відправити поточну швидкість цільового SET 110 в повідомленні SUPL REPORT до SET 114, що запитує (етап О). H-SLP 130 може також відіслати швидкість цільового SET 110 кожний раз, коли вона прийнята від SET 110. Цільовий SET 110 може також відіслати його швидкість безпосередньо в SET 114, що запитує, не взаємодіючи з H-SLP 130 (наприклад, як визначено пунктирною лінією на ФІГ. 9). У будь-якому випадку, SET 114, що запитує, може видати швидкість цільового SET 110 агенту SUPL 144 (етап Р). Етапи L-P призначені для одного циклу обробки. Додаткові цикли обробки можуть бути виконані аналогічним чином (етап Q). Кожний цикл обробки може включати в себе етапи, щоб визначити швидкість цільового SET 110 і видати швидкість SET 114, що запитує. Кінець сеансу швидкості SET відносно SET може бути досягнутий, наприклад, коли час зупинки досягнутий і т. д. Після досягнення кінця сеансу H-SLP 130, SET 114, що запитує, і цільовий SET 110 можуть закінчити сеанс. H-SLP 130 може відіслати повідомлення SUPL END на цільовий SET 110 (етап R). H-SLP 130 може також повідомити SET 114, що запитує, про кінець сеансу, і SET 114 може потім повідомити агента SUPL 144. Для простоти Фіг. 9 показує випадок, в якому SET 114, що запитує, запитує швидкість одного цільового SET 110. SET 114, що запитує, може також запитати швидкість множинних цільових терміналів SET. Кожний цільовий SET може виконувати обробку, як показано на Фіг. 9, для цільового SET 110. У іншому виконанні, яке основане на Фіг. 9, SET 114, що запитує, може визначити свою швидкість відносно цільового SET 110 за допомогою обміну сигналів (наприклад, радіосигналів або інфрачервоних сигналів) безпосередньо з цільовим SET 110. Будь-який SET може виміряти затримку поширення сигналу проходження туди і назад і може отримати відстань по прямій лінії між терміналами SET на основі вимірювання сигналу. Повторюючи вимірювання сигналу і обчислення відстані в коротких інтервалах, будь-який SET може отримати відносну швидкість одного SET відносно іншого. Альтернативно, якщо сигнали, що обмінюються між терміналами SET, включають в себе компонент фіксованої і відомої частоти або деякий маркер в сигналі, який повторюється в фіксованих відомих інтервалах, то будь-який SET може отримати свою відносну швидкість відносно іншого SET, вимірюючи зміну в частоті частотного компонента або періодичного маркера. Ця процедура обміну і вимірювання сигналу може замінити етапи I-L на Фіг. 9 для обох терміналів SET. Фіг. 3 і 6-9 показують зразкові потоки повідомлень для різних послуг визначення місцеположення, використовуючи повідомлення SUPL. Потоки повідомлень можуть бути різні. Наприклад, агент SUPL 140 може запитати H-SLP 130 закінчити сеанс, що продовжується. HSLP 130, SET 110 і/або SET 112 може також вирішити закінчити сеанс, що продовжується. У цих випадках H-SLP 130, SET 110, і SET 112 (якщо є) можуть вжити заходи, щоб закінчити сеанс. Агент SUPL 140, H-SLP 130, SET 110 або SET 112 (якщо є) можуть запитати, щоб послуга зробила паузу. У цьому випадку при визначенні позиції і виявленні подій активатора можуть бути зроблені паузи (тобто, не виконані), поки запит про поновлення послуги не буде зроблений об'єктом, що запитує паузу. Послуги визначення місцеположення, описані тут, можуть дозволити агенту SUPL отримувати інформацію місцеположення для цільового SET з єдиним запитом визначення місцеположення до H-SLP, замість того щоб робити множинні запити і оцінювати результати. Активовані послуги визначення місцеположення можуть скоротити кількість запитів визначення місцеположення і можуть значно зменшити об'єм сигналізації і обробки для всіх порушених об'єктів, таких як агент SUPL, H-SLP і цільовий SET. Фіг. 10 показує структуру процесу 1000 для підтримки активованих послуг визначення місцеположення. Процес 1000 може бути виконаний терміналом/SET, H-SLP, або деяким іншим об'єктом. Щонайменше одне вимірювання, що належить до визначення місцеположення, для термінала може бути отримане (блок 1012). Кожне вимірювання, що належить до визначення місцеположення, може мати місце для відстані, пройденої терміналом, або швидкості термінала або місцеположення термінала відносно рухомої географічної цільової зони. Чи мала місце подія активатора, може бути визначено на основі щонайменше одного визначення місцеположення, що належить до вимірювання для термінала (блок 1014). Повідомлення може бути відіслане, якщо подія активатора відбулася (блок 1016). У одному виконанні, для еквідистантно активованої послуги, щонайменше одне вимірювання, що належить до визначення місцеположення, може мати місце для відстані, пройденої терміналом. Відстань, пройдена терміналом, може бути визначена по-різному. У 15 UA 100800 C2 5 10 15 20 25 30 35 40 45 50 55 одному виконанні пройдена відстань може бути визначена за допомогою (i) періодичного визначення місцеположення термінала і (ii) накопичення зростаючих відстаней між послідовними місцеположеннями термінала, починаючи з останньої активованої події (або початку активованого сеансу). У іншому виконанні пройдена відстань може бути визначена на основі відстані між поточним місцеположенням термінала і початковим місцеположенням, яке може бути місцеположенням термінала при останній події активатора. У ще одному виконанні пройдена відстань може бути визначена на основі відстані між поточним місцеположенням термінала і початковим місцеположенням вздовж конкретного маршруту. Цей конкретний маршрут може бути вздовж траєкторії прямої лінії або складнішим маршрутом. Відстань, пройдена терміналом, може бути також визначена іншими способами. У будь-якому випадку, чи відбулася подія активатора, може бути визначено на основі відстані, пройденої терміналом. Наприклад, подія активатора може бути оголошена, якщо відстань, пройдена терміналом, перевищує заздалегідь задану відстань. У іншому виконанні, для SET відносно SET активованої послуги, щонайменше одне вимірювання, що належить до визначення місцеположення, може мати місце для визначення місцеположення термінала відносно рухомої географічної цільової зони. Рухома географічна цільова зона може бути визначена на основі місцеположення опорного термінала. Наприклад, рухома географічна цільова зона може бути круговою зоною, центрованою в місцеположенні опорного термінала і такою, що має заздалегідь заданий радіус. Чи мала місце подія активатора, може бути визначено на основі місцеположення термінала відносно рухомої географічної цільової зони. Наприклад, подія активатора може бути оголошена, якщо місцеположення термінала відповідає критерію відносно рухомої географічної цільової зони. Критерієм може бути знаходження всередині, зовні, вхід або вихід з рухомої географічної цільової зони. У ще одному виконанні, для активованої швидкістю послуги щонайменше одне вимірювання, що належить до визначення місцеположення, для термінала може бути для швидкості термінала. Швидкість може включати в себе тільки швидкість, або тільки курс, або і швидкість і курс. Чи мала місце подія активатора, може бути визначено на основі швидкості термінала. Наприклад, швидкість термінала може періодично визначатися. Подія активатора може бути оголошена, якщо швидкість термінала в будь-який час, починаючи з останньої активованої події, задовольняє або перевищує заздалегідь задану швидкість. У ще одному виконанні для послуги, активованої комбінацією T-D-V, щонайменше одне вимірювання, що належить до визначення місцеположення, може мати місце для відстані, пройденої терміналом, і швидкості термінала. Чи мала місце подія активатора, може бути визначено на основі відстані, пройденої терміналом, швидкості термінала, і/або затраченого часу, починаючи з останньої активованої події. Наприклад, множинні вирази можуть бути визначені. Кожен вираз може бути для відстані, пройденої терміналом відносно заздалегідь заданої відстані, або максимальної швидкості термінала відносно заздалегідь заданої швидкості, або минулого часу відносно заздалегідь заданого часу. Чи мала місце подія активатора, може бути визначено на основі функції множинних виразів. Фіг. 11 показує структуру процесу 1100 для підтримки послуги швидкості SET відносно SET. Процес 1100 може бути виконаний першим терміналом/SET. Перший термінал може відіслати запит про швидкість другого термінала, наприклад, в центр визначення місцеположення, такий як H-SLP (блок 1112). Перший термінал може після цього прийняти швидкість другого термінала, наприклад, від центра визначення місцеположення або безпосередньо від другого термінала, не проходячи через центр визначення місцеположення (блок 1114). Перший термінал може прийняти швидкість другого термінала або однократно або множину разів (наприклад, періодично) у відповідь на запит. Фіг. 12 показує блок-схему структури термінала/SET 110, бездротової мережі 120 і сервера/H-SLP 130 визначення місцеположення на Фіг. 1. Для простоти Фіг. 12 показує один або більше контролерів/процесорів 1210, одну пам'ять 1212, і один передавач/приймач (TMTR/RCVR) 1214 для термінала 110, один або більше контролерів/процесорів 1220, одну пам'ять 1222, один передавач/приймач 1224, і один блок зв'язку (Comm) 1226 для бездротової мережі 120, і один або більше контролерів/процесорів 1230, одну пам'ять 1232, і один блок зв'язку 1234 для H-SLP 130. У загальному випадку, кожний об'єкт може включати в себе будьяку кількість процесорів, контролерів, блоків пам'яті, передавачів/приймачів, блоків зв'язку і т. д. Термінал 110 може підтримувати зв'язок з одним або більше бездротовими і/або дротовими мережами. Термінал 110 може також прийняти і обробити сигнали від однієї або більше систем позиціонування супутника, наприклад, GPS, Galileo і т. д. 16 UA 100800 C2 5 10 15 20 25 30 35 40 45 50 55 60 На низхідній лінії зв'язку бездротова мережа 120 може передавати дані трафіка, сигналізацію і пілот-сигнал на термінали в межах її зони охоплення. Ці різні типи інформації можуть бути оброблені процесором(ами) 1220, приведені до необхідних умов передавачем 1224 і передані по низхідній лінії зв'язку. У терміналі 110 сигнали низхідної лінії зв'язку від бездротової мережі 120 можуть бути прийняті і приведені до необхідних умов приймачем 1214 і далі оброблені процесором(ами) 1210, щоб отримати різні типи інформації. Процесор(и) 1210 може виконувати процес 1000 на Фіг. 10, процес 1100 на Фіг. 11, і/або інші процеси для способів, описаних тут. Процесор(и) 1210 може також виконати обробку для будь-якого SET на Фіг. 2, 3 і 5-9. Блоки пам'яті 1212 і 1222 можуть зберігати коди програм і дані для термінала 110 і бездротової мережі 120 відповідно. По висхідній лінії зв'язку термінал 110 може передавати дані трафіка, сигналізацію і пілот-сигнал до бездротової мережі 120. Ці різні типи інформації можуть бути оброблені процесором(ами) 1210, приведені до необхідних умов передавачем 1214, і передані по висхідній лінії зв'язку. У бездротовій мережі 120 сигнали висхідної лінії зв'язку від термінала 110 та інших терміналів можуть бути прийняті і приведені до необхідних умов приймачем 1224 і далі оброблені процесором(ами) 1220, щоб отримати різні типи інформації від терміналів. Бездротова мережа 120 може прямо або непрямо обмінюватися з HSLP 130 через блок 1226 зв'язку. У H-SLP 130 процесор(и) 1230 може виконувати обробку, щоб підтримувати послуги визначення місцеположення для терміналів. Наприклад, процесор(и) 1230 може виконувати процес 1000 на Фіг. 10 і/або інші процеси для способів, описаних тут. Процесор(и) 1230 може також виконати обробку для H-SLP 130 на Фіг. 2, 3 і 5-9. Процесор(и) 1230 може також обчислити оцінки місцеположення для термінала 110, надати інформацію місцеположення агенту SUPL 140 і т. д. Пам'ять 1232 може зберігати коди програм і дані для H-SLP 130. Блок зв'язку 1234 може дозволити H-SLP 130 обмінюватися з бездротовою мережею 120, терміналом 110 і/або іншими об'єктами мережі. H-SLP 130 і термінал 110 може обмінюватися повідомленнями через площину (наприклад, SUPL)користувача, і ці повідомлення можуть бути транспортовані бездротовою мережею 120. Фахівцям зрозуміло, що інформація і сигнали можуть бути представлені, використовуючи будь-яку множину різних технологій і способів. Наприклад, дані, інструкції, команди, інформація, сигнали, біти, символи і елементи сигналу, на які можна посилатися по вищезазначеному опису, можуть бути представлені напруженнями, струмами, електромагнітними хвилями, магнітними полями або частинками, оптичними полями або частинками, або будь-якою їх комбінацією. Фахівцям також зрозуміло, що різні ілюстративні логічні блоки, модулі, схеми і етапи алгоритмів, описані застосовно до розкриття, наведеного тут, можуть бути реалізовані як електронні апаратні засоби, програмне забезпечення або комбінація обох. Щоб ясно проілюструвати цю взаємозамінність апаратних засобів і програмного забезпечення, різні ілюстративні компоненти, блоки, модулі, схеми і етапи були описані вище загалом в термінах їх функціональних можливостей. Чи реалізовані такі функціональні можливості як апаратні засоби або програмне забезпечення, залежить від конкретного додатку і обмежень структури, накладеного на повну систему. Фахівці можуть реалізувати описані функціональні можливості множиною способів для кожного конкретного додатку, але такі рішення виконання не повинні інтерпретуватися як ініціювання відходу від об'єму даного опису. Способи визначення позиції, описані тут, можуть бути реалізовані в різних мережах бездротового зв'язку, таких як бездротова глобальна мережа (WWAN), бездротова локальна мережа (WLAN), бездротова персональна мережа (WPAN), і так далі. Термін "мережа" і "система" часто використовується взаємозамінно. WWAN може бути мережею з множинним доступом з кодовим розділенням каналів (CDMA), мережею з множинним доступом з часовим розділенням каналів (TDMA), мережею з множинним доступом з частотним розділенням каналів (FDMA), мережею з множинним доступом з ортогональним частотним розділенням каналів (OFDMA), мережею з множинним доступом з частотним розділенням каналів і єдиною несучою (SC-FDMA), мережею проекту довгострокового розвитку (LTE), мережею WiMAX (IEEE 802.16) і так далі. Мережа CDMA може реалізувати одну або більше технологій радіодоступу (RAT), такі як cdma2000, Широкосмуговий-CDMA (W-CDMA), і так далі. Cdma2000 включає в себе стандарти IS-95, IS-2000, і IS-856. Мережа TDMA може реалізувати Глобальну Систему для Мобільного Зв'язку (GSM), Цифрову вдосконалену Систему Мобільних телефонів (DAMPS), або деяку іншу RAT. GSM і W-CDMA описані в документах від консорціуму, що називається "Проектом партнерства 3-го покоління" (3GPP). Cdma2000 описується в документах від консорціуму, що називається "Проект партнерства 3-го покоління 2" (3GPP2). 3GPP і 3GPP2 документи публічно доступні. WLAN може бути IEEE 802.1 мережі 1x, і WPAN 17 UA 100800 C2 5 10 15 20 25 30 35 40 45 50 55 60 може бути мережею Bluetooth, IEEE 802.15х, або деякого іншого типу мережі. Способи можуть також бути реалізовані в з'єднанні з будь-якою комбінацією WWAN, WLAN і/або WPAN. Супутникова система позиціонування (SPS) звичайно включає в себе систему передавачів, вміщених, щоб дозволити об'єктам визначити своє місцеположення на або вище Землі, основуючись, щонайменше частково, на сигналах, прийнятих від передавачів. Такий передавач звичайно передає сигнал, маркований псевдовипадковим шумовим (PN) кодом, що повторюється з набору елементів сигналу, і може бути розташований на основі наземних станцій керування, користувацького обладнання і/або космічних транспортних засобів. У конкретному прикладі такі передавачі можуть бути розташовані на супутникових транспортних засобах (SV), що обертаються навколо Землі. Наприклад, SV в сукупності Глобальної Навігаційної Супутникової Системи (GNSS), такій як Глобальна Система Позиціонування (GPS), Galileo, Glonass або Compass може передавати сигнал, маркований кодом PN, який відмінний від кодів PN, переданих іншими SV в сукупності (наприклад, використовуючи різні коди PN для кожного супутника як в GPS, або використовуючи один і той же код на різних частотах, як в Glonass). Відповідно до деяких аспектів способи, представлені тут, не обмежені глобальними системами (наприклад, GNSS) для SPS. Наприклад, описані способи можуть належати або інакше бути дозволені для використання в різних регіональних системах, таких як, наприклад, Квазізенітна Супутникова Система (QZSS) по Японії, Індійська Регіональна Навігаційна Супутникова Система (IRNSS) по Індії, Beidou по Китаю і т. д., і/або різних систем розширення (наприклад, основана на Супутникова Система контролю і корекції (SBAS)), які можуть бути асоційовані з або інакше дозволені для використання з однією або більше глобальними і/або регіональними навігаційними супутниковими системами. За допомогою прикладу, але не обмеження, SBAS може включати в себе систему(и) розширення, яка надає інформацію цілісності, відмітні корекції і т. д., такі як, наприклад, Широкозонна посилююча система (WAAS), Європейська геостаціонарна додаткова навігаційна система (EGNOS), Багатофункціональна супутникова посилююча система (MSAS), Навігаційна система розширення з допомогою GPS Geo або GPS і Geo розширена навігаційна система (GAGAN), і/або аналогічна. Таким чином, як використовується тут, термін SPS може включати в себе будь-яку комбінацію однієї або більше глобальних і/або регіональних навігаційних супутникових систем і/або систем розширення, і сигнали SPS можуть включати в себе SPS, SPS-подібні і/або інші сигнали, асоційовані з такою однією або більше SPS. Як використовується тут, термін «термінал» належить до пристрою, такого як стільниковий або інший пристрій бездротового зв'язку, пристрій персональної системи зв'язку (PC), персональний навігаційний пристрій (PND), персональний інформаційний адміністратор (PIM), персональний цифровий помічник (PDA), ноутбук або інший відповідний мобільний пристрій, який здатний до прийому бездротового зв'язку і/або навігаційних сигналів. Термін "термінал" також призначений, щоб включати в себе пристрої, які обмінюються з персональним навігаційним пристроєм (PND), таким як радіо короткохвильовим діапазоном, інфрачервоним, дротовим з'єднанням, або іншим з'єднанням - незалежно від того, чи є прийом супутникового сигналу, прийом даних допомоги, і/або пов'язана з позицією обробка в пристрої або в PND. Крім того, "термінал" призначений, щоб включати в себе всі пристрої, включаючи пристрої бездротового зв'язку, комп'ютери, ноутбуки і т. д. які здатні зв'язуватися з сервером, наприклад, через Інтернет, Wi-Fi, фемтостільники, або іншу мережу, і незалежно від того, чи є прийом супутникового сигналу, прийом даних допомоги, і/або пов'язана з позицією обробка в пристрої, в сервері або в іншому пристрої, асоційованому з мережею. Будь-яку діючу комбінацію вищезазначеного також вважають "терміналом". Способи/реалізації, описані тут, можуть бути реалізовані різними засобами залежно від додатку. Наприклад, вони можуть бути реалізовані в апаратних засобах, програмно-апаратних засобах, програмному забезпеченні або будь-якій їх комбінації. Для реалізації, що використовує апаратні засоби, процесори можуть бути реалізовані однією або більше спеціалізованими інтегральними схемами (ASIC), цифровими сигнальними процесорами (DSP), пристроями обробки цифрового сигналу (DSPD), програмованими логічними пристроями (PLD), програмованими користувачем вентильними матрицями (FPGA), процесорами загального призначення, контролерами, мікроконтролерами, мікропроцесорами, кінцевими автоматами, електронними пристроями, іншими електронними блоками, розробленими для виконання функцій, описаних тут, або їх комбінацією, наприклад, одним або більше мікропроцесорами в з'єднанні з ядром DSP, множиною мікропроцесорів, або будь-якою іншою відповідною конфігурацією. Для реалізації, що використовує програмно-апаратні засоби і/або програмне забезпечення, способи можуть бути реалізовані модулями (наприклад, процедурами, функціями, і так далі), які 18 UA 100800 C2 5 10 15 20 25 30 35 40 45 50 55 виконують функції, описані тут. Будь-який машиночитаний носій, що відчутно втілює інструкції, може використовуватися в здійсненні способів, описаних тут. Наприклад, коди програмноапаратних засобів/програмного забезпечення можуть бути збережені в пам'яті і виконані процесором/комп'ютером, щоб спонукати процесор/комп'ютер виконувати функції. Пам'ять може бути реалізована в процесорі або бути зовнішньою до процесора. Як використовується тут, термін "пам'ять" належить до будь-якого типу довготривалого, короткочасного, енергозалежної, енергонезалежної або іншої пам'яті і не повинен бути обмежений конкретним типом пам'яті або кількістю блоків пам'яті або типом носіїв, на яких збережена пам'ять. Якщо реалізовані в програмно-апаратних засобах і/або програмному забезпеченні, функції можуть бути збережені як одна або більше інструкцій або код на комп'ютерочитаному носії. Приклади включають в себе комп’ютерочитані носії, кодовані структурою даних і комп’ютерочитані носії, закодовані комп'ютерною програмою. Комп’ютерочитані носії можуть прийняти форму комп'ютерного програмного продукту. Комп’ютерочитані носії включають в себе фізичні комп'ютерні носії даних. Носій даних може бути будь-яким доступним носієм, до якого може отримати доступ комп'ютер. За допомогою прикладу, і не обмеження, такі комп’ютерочитані носії можуть містити RAM, ROM, EEPROM, CD-ROM або інший засіб зберігання на оптичному диску, засіб зберігання на магнітному диску, засіб зберігання на напівпровідниках або інші пристрої зберігання, або будь-який інший носій, який може використовуватися, щоб зберегти бажаний код програми у формі інструкцій або структур даних, і до якого може отримати доступ комп'ютер; диск (disk) і диск (disc), як використовується тут, включають в себе компакт-диск (CD), лазерний диск, оптичний диск, цифровий універсальний диск (DVD), дискету і диск Blu-ray, де диски (disks) звичайно відтворюють дані магнітним чином, в той час як диски (discs) відтворюють дані оптично за допомогою лазерів. Комбінації вищезазначеного повинні також бути включені в рамки комп’ютерочитаних носіїв. У доповнення до зберігання на комп’ютерочитаному носії інструкції і/або дані можуть бути представлені як сигнали на носіях передачі, включених в пристрій зв'язку. Наприклад, пристрій зв'язку може включати в себе приймач-передавач, що має сигнали, що вказують інструкції і дані. Інструкції і дані конфігуруються, щоб спонукати один або більше процесорів реалізовувати функції, описані у формулі винаходу. Таким чином, пристрій зв'язку включає в себе носії передачі з сигналами, що вказують інформацію для виконання розкритих функцій. У перший раз носії передачі, включені в пристрій зв'язку, можуть включати в себе першу частину інформації, щоб виконувати розкриті функції, в той час як у другий раз носії передачі, включені в пристрій зв'язку, можуть включати в себе другу частину інформації, щоб виконувати розкриті функції. Заголовки включені тут для посилання і щоб допомогти у визначенні деяких секцій. Ці заголовки не призначені, щоб обмежити зону понять, описаних в них, і ці поняття можуть мати застосовність в інших секціях всюди по всьому опису. Попередній опис розкриття наданий, щоб дозволити будь-якій людині, фахівцеві в галузі техніки, зробити або використати розкриття винаходу. Різні модифікації до цього розкриття будуть очевидні для фахівця в даній галузі техніки, і загальні принципи, визначені тут, можуть бути застосовані до інших змін, не відступаючи від об'єму розкриття. Таким чином, це розкриття не призначене, щоб бути обмеженим прикладами і структурами, описаними тут, але повинне отримати найширший об'єм, сумісний з принципами і новими ознаками, розкритими в даному описі. ФОРМУЛА ВИНАХОДУ 1. Спосіб підтримки послуг визначення місцеположення, що містить: отримання щонайменше одного вимірювання, що належить до визначення місцеположення, для термінала, причому кожне вимірювання, що належить до визначення місцеположення, призначене для відстані, пройденої терміналом; і визначення, чи мала місце ініціююча подія, на основі щонайменше одного вимірювання, що належить до визначення місцеположення, для термінала, причому визначення, чи мала місце ініціююча подія, містить визначення, чи мала місце ініціююча подія, на основі відстані, пройденої терміналом. 2. Спосіб за п. 1, в якому визначення відстані, пройденої терміналом, містить періодичне визначення місцеположення термінала, і визначення відстані, пройденої терміналом, за допомогою накопичення відстаней між послідовними місцеположеннями термінала з часу останньої ініціюючої події. 19 UA 100800 C2 5 10 15 20 25 30 35 40 45 50 55 60 3. Спосіб за п. 1, в якому визначення відстані, пройденої терміналом, містить визначення відстані, пройденої терміналом, на основі відстані між поточним місцеположенням термінала і початковим місцеположенням. 4. Спосіб за п. 1, в якому визначення відстані, пройденої терміналом, містить визначення відстані, пройденої терміналом, на основі відстані між поточним місцеположенням термінала і початковим місцеположенням вздовж конкретного маршруту. 5. Спосіб за п. 1, в якому визначення, чи мала місце ініціююча подія, містить визначення, що ініціююча подія відбулася, якщо відстань, пройдена терміналом, перевищує заздалегідь задану відстань. 6. Спосіб за п. 1, який додатково містить відправлення повідомлення, якщо ініціююча подія відбулася. 7. Спосіб за п. 1, в якому щонайменше одне вимірювання, що належить до визначення місцеположення, для термінала, отримане на основі щонайменше одного сигналу, що обмінюється між терміналом і другим терміналом. 8. Спосіб за п. 1, який додатково містить обмін повідомленнями Безпечного Визначення Місцеположення Користувацької Площини (SUPL), щоб отримати щонайменше одне вимірювання, що належить до визначення місцеположення. 9. Спосіб підтримки послуг визначення місцеположення, що містить: отримання щонайменше одного вимірювання, що належить до визначення місцеположення, для термінала, причому кожне вимірювання, що належить до визначення місцеположення, призначене для визначення місцеположення термінала відносно рухомої географічної цільової зони; і визначення, чи мала місце ініціююча подія, на основі щонайменше одного вимірювання, що належить до визначення місцеположення, для термінала, причому визначення, чи мала місце ініціююча подія, містить визначення, чи мала місце ініціююча подія, на основі місцеположення термінала відносно рухомої географічної цільової зони. 10. Спосіб за п. 9, в якому визначення місцеположення термінала відносно рухомої географічної цільової області містить: визначення місцеположення опорного термінала, і визначення рухомої географічної цільової зони на основі місцеположення опорного термінала. 11. Спосіб за п. 10, в якому рухома географічна цільова зона є круглою зоною, центрованою в місцеположенні опорного термінала і має заздалегідь заданий радіус. 12. Спосіб за п. 9, в якому визначення, чи мала місце ініціююча подія, містить визначення, що ініціююча подія відбулася, якщо місцеположення термінала задовольняє критерій відносно рухомої географічної цільової зони, причому критерієм є знаходження всередині, зовні, вхід або вихід з рухомої географічної цільової зони. 13. Спосіб підтримки послуг визначення місцеположення, що містить: отримання щонайменше одного вимірювання, що належить до визначення місцеположення, для термінала, причому кожне вимірювання, що належить до визначення місцеположення, призначене для швидкості термінала; і визначення, чи мала місце ініціююча подія, на основі щонайменше одного вимірювання, що належить до визначення місцеположення, для термінала, причому визначення, чи мала місце ініціююча подія, містить визначення, чи дійсно швидкість термінала в будь-який момент часу з часу останньої ініціюючої події відповідає або перевищує першу заздалегідь задану швидкість. 14. Спосіб за п. 13, в якому визначення, чи мала місце ініціююча подія, містить визначення, що ініціююча подія відбулася, якщо швидкість термінала менша другої заздалегідь заданої швидкості, і після цього відповідає або перевищує першу заздалегідь задану швидкість. 15. Спосіб підтримки послуг визначення місцеположення, що містить: отримання щонайменше одного вимірювання, що належить до визначення місцеположення, для термінала, причому кожне вимірювання, що належить до визначення місцеположення, призначене для відстані, пройденої терміналом, і швидкості термінала; і визначення, чи мала місце ініціююча подія, на основі щонайменше одного вимірювання, що належить до визначення місцеположення, для термінала, причому визначення, чи мала місце ініціююча подія, містить визначення, чи мала місце ініціююча подія, на основі відстані, пройденої терміналом, і швидкості термінала. 16. Спосіб за п. 15, в якому визначення, чи мала місце ініціююча подія, також основане на часі, що минув, з часу останньої ініціюючої події. 17. Спосіб за п. 15, в якому визначення, чи мала місце ініціююча подія, містить: визначення множинних виразів, причому кожен вираз призначений для відстані, пройденої терміналом відносно заздалегідь заданої відстані, або максимальної швидкості термінала 20 UA 100800 C2 5 10 15 20 25 30 35 40 45 50 55 60 відносно заздалегідь заданої швидкості, або часу, що минув, відносно заздалегідь заданого часу, і визначення, чи мала місце ініціююча подія, на основі функції множинних виразів. 18. Пристрій для підтримки послуг визначення місцеположення, що містить: засіб для отримання щонайменше одного вимірювання, що належить до визначення місцеположення, для термінала, причому кожне вимірювання, що належить до визначення місцеположення, призначене для відстані, пройденої терміналом; і засіб для визначення, чи мала місце ініціююча подія, на основі щонайменше одного вимірювання, що належить до визначення місцеположення, для термінала, причому засіб для визначення, чи мала місце ініціююча подія, містить засіб для визначення, чи мала місце ініціююча подія, на основі відстані, пройденої терміналом. 19. Пристрій за п. 18, в якому засіб для визначення, чи мала місце ініціююча подія, містить засіб для визначення, що ініціююча подія відбулася, якщо відстань, пройдена терміналом, перевищує заздалегідь задану відстань. 20. Пристрій за п. 18, який додатково містить: засіб для визначення місцеположення опорного термінала, і засіб для визначення рухомої географічної цільової зони, на основі місцеположення опорного термінала. 21. Пристрій для підтримки послуг визначення місцеположення, що містить: засіб для отримання щонайменше одного вимірювання, що належить до визначення місцеположення, для термінала, причому кожне вимірювання, що належить до визначення місцеположення, призначене для визначення місцеположення термінала відносно рухомої географічної цільової зони; і засіб для визначення, чи мала місце ініціююча подія, на основі щонайменше одного вимірювання, що належить до визначення місцеположення, для термінала, причому засіб для визначення, чи мала місце ініціююча подія, містить засіб для визначення, чи мала місце ініціююча подія, на основі місцеположення термінала відносно рухомої географічної цільової зони. 22. Пристрій для підтримки послуг визначення місцеположення, що містить: засіб для отримання щонайменше одного вимірювання, що належить до визначення місцеположення, для термінала, причому кожне вимірювання, що належить до визначення місцеположення, призначене для відстані, пройденої терміналом; і засіб для визначення, чи мала місце ініціююча подія, на основі щонайменше одного вимірювання, що належить до визначення місцеположення, для термінала, причому засіб для визначення, чи мала місце ініціююча подія, містить засіб для визначення, чи мала місце ініціююча подія, на основі того, чи дійсно швидкість термінала в будь-який момент часу з часу останньої ініціюючої події відповідає або перевищує першу заздалегідь задану швидкість. 23. Пристрій за п. 22, в якому засіб для визначення, чи мала місце ініціююча подія, містить: засіб для визначення максимальної швидкості термінала, з часу останньої ініціюючої події, і засіб для визначення, що ініціююча подія відбулася, якщо максимальна швидкість перевищує заздалегідь задану швидкість. 24. Пристрій для підтримки послуг визначення місцеположення, що містить: засіб для отримання щонайменше одного вимірювання, що належить до визначення місцеположення, для термінала, причому кожне вимірювання, що належить до визначення місцеположення, призначене для відстані, пройденої терміналом, або швидкості термінала; і засіб для визначення, чи мала місце ініціююча подія, на основі щонайменше одного вимірювання, що належить до визначення місцеположення, для термінала, причому щонайменше одне вимірювання, що належить до визначення місцеположення, призначене для відстані, пройденої терміналом, і швидкості термінала, і причому засіб для визначення, чи відбулась ініціююча подія, містить засіб для визначення, чи мала місце ініціююча подія, на основі відстані, пройденої терміналом, і швидкості термінала. 25. Пристрій за п. 24, в якому засіб для визначення, чи мала місце ініціююча подія, містить: засіб для визначення множинних виразів, причому кожен вираз призначений для відстані, пройденої терміналом відносно заздалегідь заданої відстані, або максимальної швидкості термінала відносно заздалегідь заданої швидкості, або часу, що минув, відносно заздалегідь заданого часу, і засіб для визначення, чи мала місце ініціююча подія, на основі функції множинних виразів. 26. Пристрій для підтримки послуг визначення місцеположення, що містить: щонайменше один процесор, сконфігурований з можливістю отримати щонайменше одне вимірювання, що належить до визначення місцеположення, для термінала, причому кожне вимірювання, що належить до визначення місцеположення, призначене для відстані, пройденої 21 UA 100800 C2 5 10 15 20 25 30 35 40 45 терміналом, і визначати, чи мала місце ініціююча подія, на основі щонайменше одного вимірювання, що належить до визначення місцеположення, для термінала, причому щонайменше один процесор сконфігурований з можливістю визначати відстань, пройдену терміналом, і визначати, чи мала місце ініціююча подія, на основі відстані, пройденої терміналом. 27. Пристрій за п. 26, в якому щонайменше один процесор конфігурується з можливістю визначати, що ініціююча подія відбулася, якщо відстань, пройдена терміналом, перевищує заздалегідь задану відстань. 28. Пристрій за п. 26, в якому щонайменше один процесор конфігурується з можливістю визначати місцеположення опорного термінала і визначати рухому географічну цільову зону, на основі визначення місцеположення опорного термінала. 29. Пристрій для підтримки послуг визначення місцеположення, що містить: щонайменше один процесор, сконфігурований з можливістю отримати щонайменше одне вимірювання, що належить до визначення місцеположення, для термінала, причому кожне вимірювання, що належить до визначення місцеположення, призначене для визначення місцеположення термінала відносно рухомої географічної цільової зони, і визначати, чи мала місце ініціююча подія, на основі щонайменше одного вимірювання, що належить до визначення місцеположення, для термінала, причому щонайменше один процесор сконфігурований з можливістю визначати, чи мала місце ініціююча подія на основі визначення місцеположення термінала відносно рухомої географічної цільової зони. 30. Пристрій для підтримки послуг визначення місцеположення, що містить: щонайменше один процесор, сконфігурований з можливістю отримати щонайменше одне вимірювання, що належить до визначення місцеположення, для термінала, причому кожне вимірювання, що належить до визначення місцеположення, призначене для швидкості термінала, і визначати, чи мала місце ініціююча подія на основі щонайменше одного вимірювання, що належить до визначення місцеположення, для термінала, причому щонайменше один процесор сконфігурований з можливістю визначати швидкість термінала і визначати, чи мала місце ініціююча подія, на основі того, чи дійсно швидкість термінала в будьякий момент часу з часу останньої ініціюючої події відповідає або перевищує першу заздалегідь задану швидкість. 31. Пристрій за п. 30, в якому щонайменше один процесор конфігурується з можливістю визначати максимальну швидкість термінала з часу останньої ініціюючої події, і визначати, що ініціююча подія відбулася, якщо максимальна швидкість перевищує заздалегідь задану швидкість. 32. Пристрій для підтримки послуг визначення місцеположення, що містить: щонайменше один процесор, сконфігурований з можливістю отримати щонайменше одне вимірювання, що належить до визначення місцеположення, для термінала, причому кожне вимірювання, що належить до визначення місцеположення, призначене для відстані, пройденої терміналом, або швидкості термінала, причому щонайменше один процесор конфігурується з можливістю визначати відстань, пройдену терміналом, і швидкість термінала, і визначати, чи мала місце ініціююча подія, на основі відстані, пройденої терміналом, і швидкості термінала. 33. Пристрій за п. 32, в якому щонайменше один процесор конфігурується з можливістю визначати множинні вирази, причому кожний вираз призначений для відстані, пройденої терміналом, відносно заздалегідь заданої відстані, або максимальної швидкості термінала відносно заздалегідь заданої швидкості, або часу, що минув, відносно заздалегідь заданого часу, і визначати, чи мала місце ініціююча подія, на основі функції множинних виразів. 22 UA 100800 C2 23 UA 100800 C2 24 UA 100800 C2 25 UA 100800 C2 26 UA 100800 C2 27 UA 100800 C2 28
ДивитисяДодаткова інформація
Назва патенту англійськоюTriggered location services
Автори англійськоюWachter, Andreas, K., Edge, Stephen, W., Burroughs, Kirk, Allan
Назва патенту російськоюАктивированные услуги определения местоположения
Автори російськоюВахтер Андреас К., Едж Стефен В., Барроз Кирк Аллан
МПК / Мітки
МПК: H04W 4/02, H04L 29/08
Мітки: визначення, активовані, послуги, місцеположення
Код посилання
<a href="https://ua.patents.su/33-100800-aktivovani-poslugi-viznachennya-miscepolozhennya.html" target="_blank" rel="follow" title="База патентів України">Активовані послуги визначення місцеположення</a>
Спосіб визначення орієнтації і місцеположення транспортного засобу
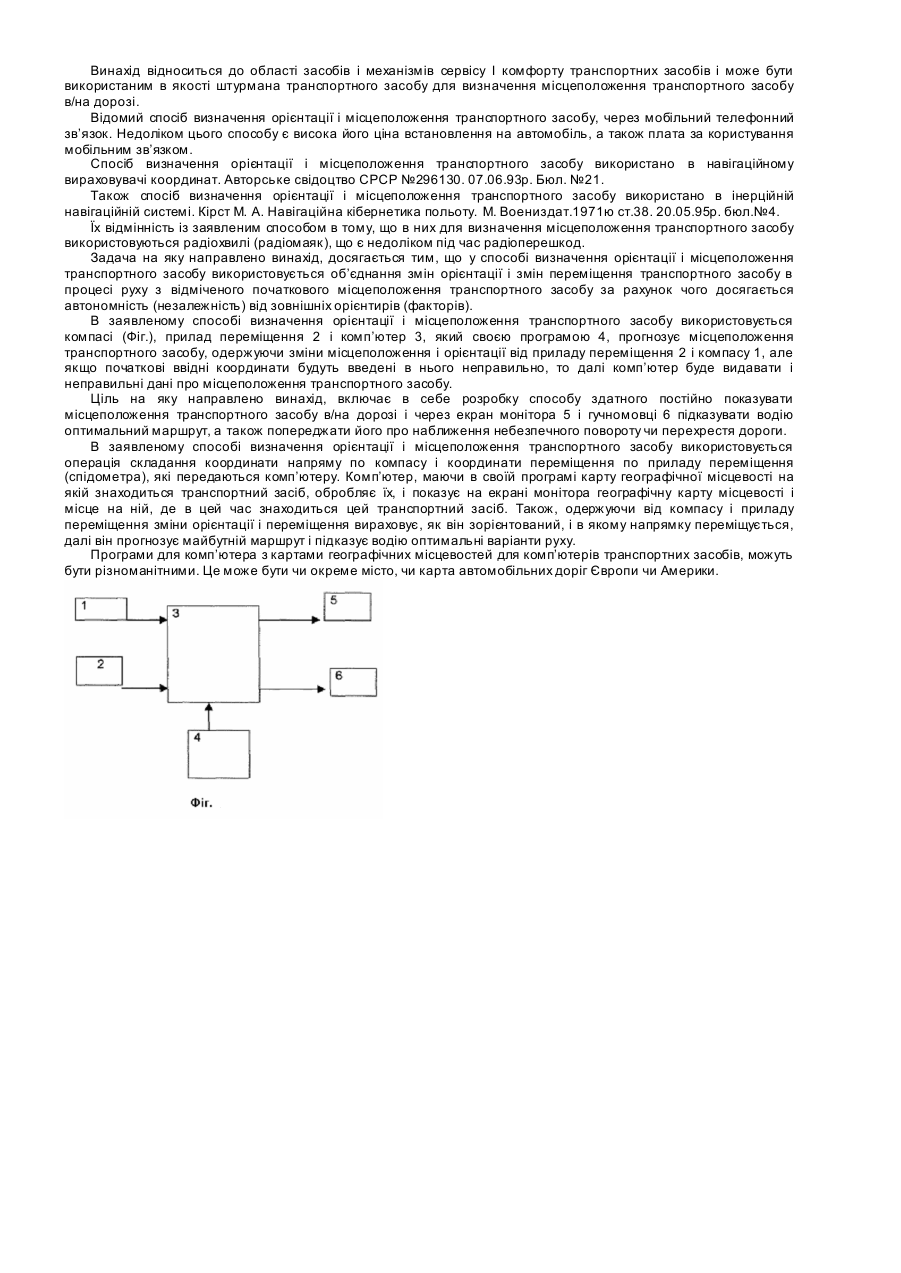
Номер патенту: 64162
Опубліковано: 16.02.2004
Автор: Гайдук Павло Миколайович
МПК: G01C 23/00, G01C 21/00
Мітки: транспортного, місцеположення, спосіб, орієнтації, засобу, визначення
Формула / Реферат:
Спосіб визначення орієнтації і місцеположення транспортного засобу, що полягає в визначенні місцеположення транспортного засобу на географічній карті, який відрізняється тим, що відмічають початкове місцеположення транспортного засобу на географічній карті, введеній у комп’ютер, та визначають його орієнтацію відносно сторін світу, а в процесі руху транспортного засобу зміни його місцеположення і орієнтації передають в комп’ютер, і одержують...
Спосіб визначення місцеположення літального апарата
Номер патенту: 49076
Опубліковано: 12.04.2010
Автори: Слєпов Лев Іванович, Блаженний Валерій Іванович, Щипанський Павло Володимирович, Герасименко Володимир Вікторович
МПК: G01S 5/10
Мітки: визначення, літального, спосіб, апарата, місцеположення
Формула / Реферат:
Спосіб визначення місцеположення літального апарата, при якому визначають місцеположення літального апарата за допомогою використання оглядового радіолокатора, який відрізняється тим, що додатково отримують інформацію про координати місцеположення літального апарата за допомогою двох і більше оглядових радіолокаторів та оцінюють за допомогою формули,і...
Спосіб визначення місцеположення свищів у виробах
Номер патенту: 27486
Опубліковано: 12.11.2007
Автори: Бабак Віталій Павлович, Філоненко Сергій Федорович, Пономаренко Олександр Васильович
МПК: F17D 5/02, G01N 29/00, G01N 29/14, G01M 3/00
Мітки: спосіб, виробах, визначення, свищів, місцеположення
Формула / Реферат:
Спосіб визначення місцеположення свищів у виробах, що включає встановлення на об'єкті контролю двох датчиків, реєстрацію сигналів акустичної емісії з одночасним вимірюванням їх характеристик, за якими визначають місцеположення свищів, який відрізняється тим, що як вищезгадані характеристики використовують положення в часі енергетичного центра ваги пікового сигналу у взаємній кореляційній функції, за яким визначають місцеположення свища у...
Спосіб узгодження версії визначення місцеположення користувацької площини

Номер патенту: 94672
Опубліковано: 25.05.2011
Автори: Вахтер Андреас К., Едж Стефен В.
МПК: H04L 29/06
Мітки: користувацької, визначення, узгодження, місцеположення, площині, версії, спосіб
Формула / Реферат:
1. Спосіб узгодження версії визначення місцеположення захищеної користувацької площини (SUPL), який містить: передачу повідомлення ініціації SUPL від мережного пристрою до пристрою SUPL, причому повідомлення ініціації SUPL визначає множину версій SUPL, кожна з яких здатна підтримувати бажану службу; і прийом від пристрою SUPL відповіді, яка основана, щонайменше частково, на здатності пристрою SUPL підтримувати щонайменше одну з цієї множини...
Спосіб (варіанти) і пристрій (варіанти) для використання інформації про сервісні можливості для визначення місцеположення площини користувача
Номер патенту: 100037
Опубліковано: 12.11.2012
Автори: Барроз Кірк Аллан, Вахтер Андреас К., Фармер Домінік Джерард
МПК: H04W 8/22, H04W 8/16, H04W 4/02, H04W 64/00, H04W 8/18
Мітки: місцеположення, варіанти, можливості, користувача, інформації, площині, визначення, пристрій, використання, спосіб, сервісні
Формула / Реферат:
1. Спосіб підтримки сервісів визначення місцеположення, який включає етапи, на якихприймають повідомлення, відправлене терміналом на сервер визначення місцеположення через площину користувача, причому повідомлення вказує сервісні можливості термінала, причому сервісні можливості містять критерії запуску для визначення, чи слід отримувати оцінку місцеположення термінала,визначають, чи підтримується сервіс визначення...
Попередній патент: Різноспрямований гістерезисний торсіонний демпфер (ргтд)
Наступний патент: Тарілка з двома зонами контакту фаз
Випадковий патент: Спосіб депарафінізації нафтогазовидобувних свердловин