Підвищення пропускної здатності бездротового зв’язку
Номер патенту: 102398
Опубліковано: 10.07.2013
Автори: Блек Пітер Дж., Аттар Рашид Ахмед Акбар, Цзоу Юй-Чеунь
Формула / Реферат
1. Спосіб зв'язку з використанням шаблона стробованого пілот-сигналу, який включає етапи, на яких:
приймають RX-кадр, форматований в першу сукупність підсегментів,
обробляють RX-кадр як кадр нульової швидкості, якщо прийнятий пілот-сигнал, асоційований з RX-кадром, був переданий згідно з шаблоном стробованого пілот-сигналу,
обробляють команди керування потужністю, прийняті в одному або більше з підсегментів першої сукупності, асоційованих з RX-кадром, які були призначені для передачі згідно з шаблоном стробованого пілот-сигналу,
регулюють потужність передачі одного або більше з підсегментів ТХ-кадру, форматованого у другу сукупність підсегментів після обробки прийнятих команд керування потужністю, причому потужність передачі регулюється згідно з обробленими командами керування потужністю, при цьому, якщо ТХ-кадр є кадром нульової швидкості, регулювання потужності передачі одного або більше з підсегментів ТХ-кадру додатково містить:
ігнорування однієї або більше з оброблених команд керування потужністю згідно з першою попередньо визначеною послідовністю; і
вибір одного або більше з підсегментів ТХ-кадру для асоціювання з відрегульованою потужністю передачі згідно з другою попередньо визначеною послідовністю; і
передачу другої сукупності підсегментів, асоційованих з ТХ-кадром, згідно з відрегульованою потужністю передачі.
2. Спосіб за п. 1, в якому RX-кадр приймають на базовій станції по зворотній лінії зв'язку системи бездротового зв'язку cdma2000 або на мобільній станції по прямій лінії зв'язку системи бездротового зв'язку cdma2000, і
другу сукупність підсегментів, асоційованих з ТХ-кадром, передають від базової станції по прямій лінії зв'язку системи бездротового зв'язку cdma2000 або від мобільної станції по зворотній лінії зв'язку системи бездротового зв'язку cdma2000.
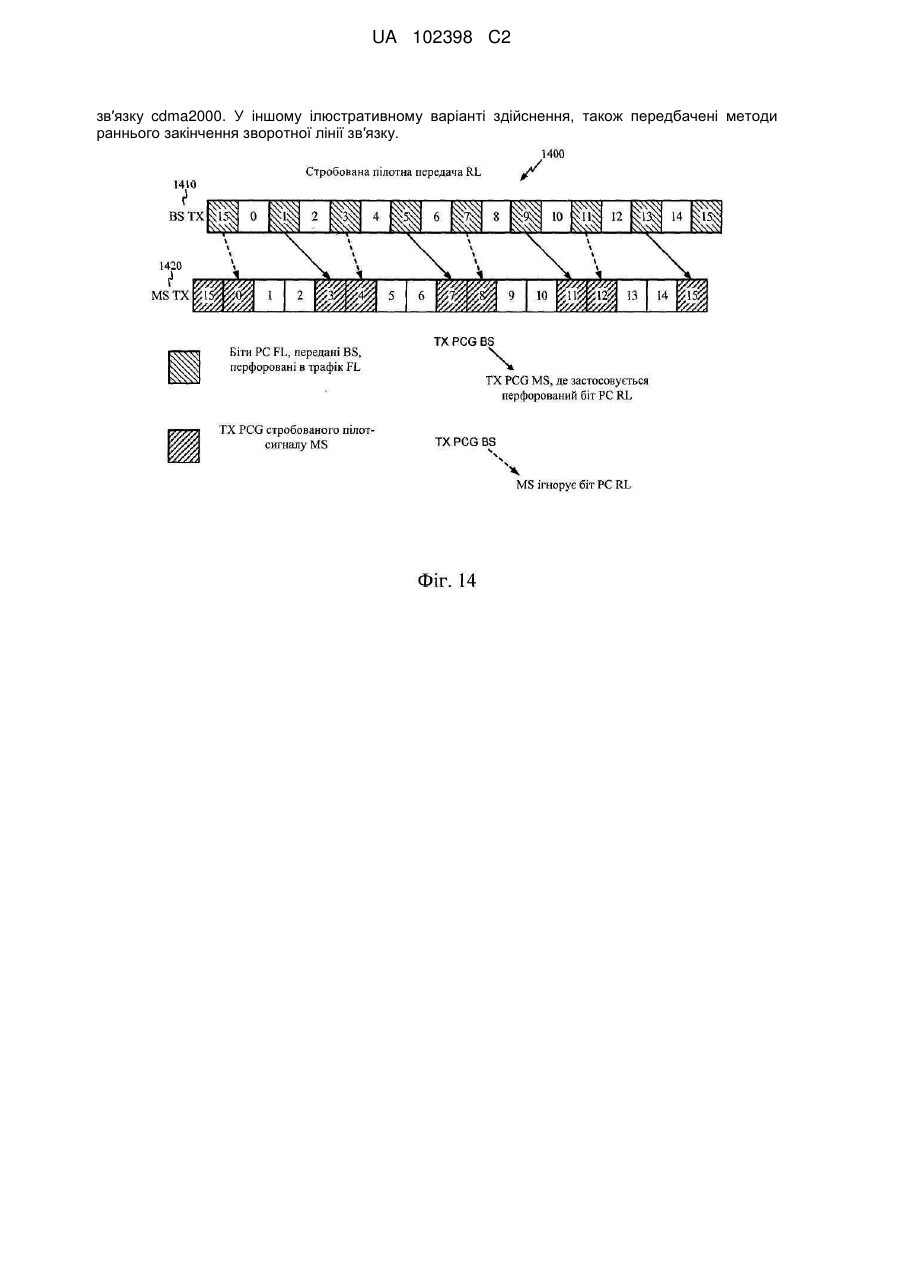
3. Спосіб за п. 1, в якому шаблон стробованого пілот-сигналу передбачає передачу і не передачу протягом групи двох або більше послідовних підсегментів RX-кадру.
4. Спосіб за п. 1, в якому шаблон стробованого пілот-сигналу передбачає перемежовування між передачею і не передачею в кожному другому підсегменті RX-кадру.
5. Спосіб зв'язку з використанням шаблона стробованого пілот-сигналу, який включає етапи, на яких:
приймають RX-кадр, форматований в першу сукупність підсегментів,
приймають команди керування потужністю в кожному другому з підсегментів першої сукупності RX-кадру;
обробляють прийняті команди керування потужністю;
регулюють потужність передачі одного або більше з підсегментів ТХ-кадру, форматованого у другу сукупність підсегментів після обробки прийнятих команд керування потужністю, причому потужність передачі регулюється згідно з обробленими командами керування потужністю, причому регулювання потужності передачі одного або більше з підсегментів ТХ-кадру додатково містить, якщо ТХ-кадр є кадром нульової швидкості:
ігнорування кожної другої з оброблених команд керування потужністю; і
регулювання потужності передачі кожного четвертого підсегмента другої сукупності підсегментів, асоційованих з ТХ-кадром; і
передачу ТХ-кадру згідно з відрегульованою потужністю передачі, причому передача містить передачу пілот-сигналу згідно з шаблоном стробованого пілот-сигналу, якщо ТХ-кадр є кадром нульової швидкості, шаблон стробованого пілот-сигналу передбачений для передачі і не передачі протягом перемежовуваних груп двох або більше послідовних підсегментів ТХ-кадру.
6. Спосіб за п. 5, в якому
RX-кадр приймають на базовій станції по зворотній лінії зв'язку системи бездротового зв'язку cdma2000 або на мобільній станції по прямій лінії зв'язку системи бездротового зв'язку cdma2000, і
ТХ-кадр передають від базової станції по прямій лінії зв'язку системи бездротового зв'язку cdma2000 або від мобільної станції по зворотній лінії зв'язку системи бездротового зв'язку cdma2000.
7. Пристрій для зв'язку з використанням шаблона стробованого пілот-сигналу, який містить:
приймач, сконфігурований для прийому RX-кадру, форматованого в першу сукупність підсегментів,
процесор, сконфігурований для обробки RX-кадру як кадру нульової швидкості, якщо прийнятий пілот-сигнал, асоційований з RX-кадром, був переданий згідно з шаблоном стробованого пілот-сигналу, для обробки команд керування потужністю, прийнятих в одному або більше з підсегментів першої сукупності, асоційованих з RX-кадром, які були призначені для передачі згідно з шаблоном стробованого пілот-сигналу, і для регулювання потужності передачі одного або більше з підсегментів ТХ-кадру, форматованого у другу сукупність підсегментів згідно з обробленими командами керування після обробки прийнятих команд керування потужністю, причому, якщо ТХ-кадр є кадром нульової швидкості, процесор додатково сконфігурований для ігнорування однієї або більше з оброблених команд керування потужністю згідно з першою попередньо визначеною послідовністю і для вибору одного або більше з підсегментів ТХ-кадру для асоціювання з відрегульованою потужністю передачі згідно з другою попередньо визначеною послідовністю; і
передавач, сконфігурований для передачі другої сукупності підсегментів, асоційованих з ТХ-кадром, згідно з відрегульованою потужністю передачі.
8. Пристрій за п. 7, в якому пристрій містить базову станцію або мобільну станцію для системи бездротового зв'язку cdma2000.
9. Пристрій за п. 7, в якому шаблон стробованого пілот-сигналу передбачає передачу і не передачу протягом перемежовуваних груп двох або більше послідовних підсегментів RX-кадру.
10. Пристрій за п. 7, в якому шаблон стробованого пілот-сигналу передбачає перемежовування між передачею і не передачею в кожному другому підсегменті RX-кадру.
11. Пристрій для зв'язку з використанням шаблона стробованого пілот-сигналу, який містить:
приймач, сконфігурований для прийому RX-кадру, форматованого в першу сукупність підсегментів, і команд керування потужністю в кожному другому з підсегментів першої сукупності RX-кадру;
процесор, сконфігурований для обробки команд керування потужністю, прийнятих в кожному другому з підсегментів першої сукупності RX-кадру, і для регулювання потужності передачі одного або більше з підсигментів ТХ-кадру, форматованого у другу сукупність підсегментів згідно з обробленими командами керування потужністю після обробки прийнятих команд керування потужністю, причому, якщо ТХ-кадр є кадром нульової швидкості, процесор додатково сконфігурований для регулювання потужності передачі одного або більше з підсегментів ТХ-кадру за допомогою ігнорування кожної другої з оброблених команд керування потужністю і регулювання потужності передачі кожного четвертого підсегмента другої сукупності підсегментів, асоційованих з ТХ-кадром;і
передавач, сконфігурований для передачі ТХ-кадру згідно з відрегульованою потужністю передачі і передачі пілот-сигналу згідно з шаблоном стробованого пілот-сигналу, якщо ТХ-кадр є кадром нульової швидкості, причому шаблон стробованого пілот-сигналу передбачений для передачі і не передачі протягом перемежовуваних груп двох або більше послідовних підсегментів ТХ-кадру.
12. Пристрій за п. 11, який містить базову станцію або мобільну станцію для системи бездротового зв'язку cdma2000.
13. Пристрій для зв'язку з використанням шаблона стробованого пілот-сигналу, який містить:
засіб для прийому RX-кадру, форматованого в першу сукупність підсегментів,
засіб для прийому команд керування потужністю в кожному другому з підсегментів першої сукупності RX-кадру;
засіб для обробки прийнятих команд керування потужністю;
засіб для регулювання потужності передачі одного або більше з підсегментів ТХ-кадру, форматованого у другу сукупність підсегментів згідно з обробленими командами керування потужністю після обробки прийнятих команд керування потужністю в засобі для обробки прийнятих команд керування потужністю, причому, якщо ТХ-кадр є кадром нульової швидкості, засіб для регулювання потужності передачі одного або більше з підсегментів ТХ-кадру додатково містить:
засіб для ігнорування кожної другої з оброблених команд керування потужністю; і
засіб для регулювання потужності передачі кожного четвертого підсегмента другої сукупності підсегментів, асоційованих з ТХ-кадром; і
засіб для передачі ТХ-кадру згідно з відрегульованою потужністю передачі, причому згаданий засіб для передачі додатково містить засіб для передачі пілот-сигналу згідно з шаблоном стробованого пілот-сигналу, якщо ТХ-кадр є кадром нульової швидкості, причому шаблон стробованого пілот-сигналу передбачений для передачі і не передачі протягом перемежовуваних груп двох або більше послідовних підсегментів ТХ-кадру.
14. Пристрій для керування потужністю передачі, який містить:
засіб для прийому RX-кадру, форматованого в першу сукупність підсегментів,
засіб для обробки RX-кадру як кадру нульової швидкості, якщо прийнятий пілот-сигнал, асоційований з RX-кадром, був переданий згідно з шаблоном стробованого пілот-сигналу;
засіб для обробки команд керування потужністю, прийнятих в одному або більше з підсегментів першої сукупності, асоційованих з RX-кадром, які були призначені для передачі згідно з шаблоном стробованого пілот-сигналу,
засіб для регулювання потужності передачі одного або більше з підсегментів ТХ-кадру, форматованого у другу сукупність підсегментів згідно з обробленими командами керування потужністю після обробки прийнятих команд керування потужністю засобом для обробки прийнятих команд керування потужністю, причому, якщо ТХ-кадр є кадром нульової швидкості, засіб для регулювання потужності передачі одного або більше з підсегментів ТХ-кадру додатково містить:
засіб для ігнорування однієї або більше оброблених команд згідно з першою попередньо визначеною послідовністю; і
засіб для вибору одного або більше з підсигментів ТХ-кадру для асоціювання з відрегульованою потужністю передачі згідно з другою попередньо визначеною послідовністю; і
засіб для передачі другої сукупності підсегментів, асоційованих з ТХ-кадром, згідно з відрегульованою потужністю передачі.
15. Комп'ютерочитаний носій інформації, який зберігає інструкції, які приписують комп'ютеру керувати потужністю передачі, причому носій додатково зберігає інструкції, які приписують комп'ютеру:
приймати RX-кадр, форматований в першу сукупність підсегментів,
обробляти RX-кадр як кадр нульової швидкості, якщо прийнятий пілот-сигнал, асоційований з RX-кадром, був переданий згідно з шаблоном стробованого пілота-сигналу;
обробляти команди керування потужністю, прийняті в одному або більше з підсегментів першої сукупності, асоційованих з RX-кадром, які були призначені для передачі згідно з шаблоном стробованого пілот-сигналу,
регулювати потужність передачі одного або більше з підсигментів ТХ-кадру, форматованого у другу сукупність підсегментів після обробки прийнятих команд керування потужністю, причому потужність передачі регулюється згідно з обробленими командами керування потужністю, при цьому, якщо ТХ-кадр є кадром нульової швидкості, інструкція, яка приписує комп'ютеру регулювати потужність передачі одного або більше з підсегментів ТХ-кадру, додатково містить інструкції, які приписують комп'ютеру:
ігнорувати одну або більше з оброблених команд керування потужністю згідно з першою попередньо визначеною послідовністю; і
вибирати один або більше з підсегментів ТХ-кадру для асоціювання з відрегульованою потужністю передачі згідно з другою попередньо визначеною послідовністю; і
передавати другу сукупність під сегментів, асоційованих з ТХ-кадром, згідно з відрегульованою потужністю передачі.
16. Комп'ютерочитаний носій інформації, який зберігає інструкції, які приписують комп'ютеру керувати потужністю передачі, причому носій додатково зберігає інструкції, які приписують комп'ютеру:
приймати RX-кадр, форматований в першу сукупність під сегментів;
приймати команди керування потужністю в кожному другому з підсегментів першої сукупності RX-кадру;
обробляти прийняті команди керування потужністю;
регулювати потужність передачі одного або більше з підсегментів ТХ-кадру, форматованого у другу сукупність підсегментів після обробки прийнятих команд керування потужністю, причому потужність передачі регулюється згідно з обробленими командами керування потужністю, при цьому, якщо ТХ-кадр є кадром нульової швидкості, інструкція, яка приписує комп'ютеру регулювати потужність передачі одного або більше з підсегментів ТХ-кадру, додатково містить інструкції, які приписують комп'ютеру:
ігнорувати кожну другу з оброблених команд керування потужністю; і
регулювати потужність передачі кожного четвертого підсегмента другої сукупності підсегментів, асоційованих з ТХ-кадром; і
передавати ТХ-кадр згідно з відрегульованою потужністю передачі, причому, якщо ТХ-кадр є кадром нульової швидкості, інструкція, яка приписує комп'ютеру передавати ТХ-кадр, додатково містить інструкції, які приписують комп'ютеру передавати пілот-сигнал згідно з шаблоном стробованого пілот-сигналу, який передбачений для передачі і не передачі протягом перемежовуваних груп двох або більше послідовних підсегментів ТХ-кадру.
Текст
Реферат: Методи підвищення пропускної здатності в системі бездротового зв′язку. Згідно з аспектом, передбачене систематичне пригнічення передачі або "обнулення" кадрів мінімальної швидкості, що передаються в системі зв′язку. В ілюстративному варіанті здійснення, кадри швидкості одна восьма в системі мовного зв'язку cdma2000 систематично замінюються кадрами нульової швидкості, що несуть нуль бітів графіка. Проте, передбачається передача визначених кадрів, вказаних як "критичні", наприклад, вокодером. Приймач виявляє присутність передач нульової швидкості або ненульової швидкості і відповідно обробляє прийняті кадри, включаючи оновлення керування потужністю по зовнішньому циклу тільки у відповідь на кадри ненульової швидкості. Передбачені додаткові методи зміни шаблона стробованої пілотної передачі, що допомагають приймачу виявляти кадри нульової швидкості. Згідно з іншим аспектом, передбачене раннє закінчення передачі сигналу по бездротовій лінії зв′язку. В ілюстративному варіанті здійснення, базова станція (BS) передає групи керування потужністю (PCG) для кадру по прямій лінії зв′язку (FL) на мобільну станцію (MS), доки безпомилковий прийом кадру не буде квітирований MS по зворотній лінії зв′язку (RL), можливо, до прийому всіх PCG кадру по FL. Можливі способи сигналізації АСК, визначені для каналів, зв′язаних із системою бездротового UA 102398 C2 (12) UA 102398 C2 зв′язку cdma2000. У іншому ілюстративному варіанті здійснення, також передбачені методи раннього закінчення зворотної лінії зв′язку. UA 102398 C2 5 10 15 20 25 30 35 40 45 50 55 Споріднені заявки Дана заявка вимагає пріоритету попередньої заявки США № 61/060,119, під назвою "Apparatus and Methods for Increasing Capacity in Wireless Communications", поданої 9 червня 2008 p., і попередньої заявки США № 61/060,408, під назвою "Apparatus and Methods for Increasing Capacity in Wireless Communications", поданої 10 червня 2008 p., і попередньої заявки США № 61/061,546, під назвою "Apparatus and Methods for Increasing Capacity in Wireless Communications", поданої 13 червня 2008 p., зміст яких в повному об'ємі включений сюди в порядку посилання. Дана заявка є частковим продовженням патентної заявки США № 12/389,211, під назвою "Frame Termination", поданої 19 лютого 2009 p., яка вимагає пріоритету попередньої заявки США № 61/030,215, поданої 20 лютого 2008 p., права на обидві з яких належать правовласнику даного винаходу, зміст яких в повному об'ємі включений сюди в порядку посилання. Галузь техніки, до якої належить винахід Даний винахід, загалом, належить до цифрового зв'язку і, зокрема, до методів зниження потужності передачі і підвищення пропускної здатності бездротових цифрових систем зв'язку. Рівень техніки Системи бездротового зв'язку широко застосовуються для забезпечення передачі різних типів інформації, наприклад, мови, пакетних даних і т. д. В основі цих систем можуть лежати методи множинного доступу з кодовим розділенням (CDMA), множинного доступу з часовим розділенням (TDMA), множинного доступу з частотним розділенням (FDMA) або інші методи множинного доступу. Наприклад, такі системи можуть узгоджуватися зі стандартами, наприклад, Third-Generation Partnership Project 2 (3gpp2 або "cdma2000"), Third-Generation Partnership (3gpp або "W-CDMA") або Long Term Evolution ("LTE"). При побудові таких систем зв'язку, бажано максимізувати пропускну здатність, або кількість користувачів, яких система може надійно підтримувати, при наявності відповідних ресурсів. Декілька факторів впливає на пропускну здатність системи бездротового зв'язку, деякі з яких описані нижче. Наприклад, в системі мовного зв'язку, часто застосовується вокодер для кодування мовної передачі з використанням однієї із сукупності змінних швидкостей кодування. Швидкість кодування можна вибирати на основі, наприклад, міри мовної активності, виявленої протягом конкретного інтервалу часу. У вокодері для системи бездротового зв'язку cdma2000, наприклад, мовні передачі можна здійснювати з використанням кадрів повної швидкості (FR), половинної швидкості (HR), четвертинної швидкості (QR) або швидкості одна восьма (ER), причому кадр повної швидкості містить найбільшу кількість бітів трафіка, і кадр швидкості одна восьма містить найменшу кількість бітів трафіка. Кадр швидкості одна восьма звичайно передається протягом періодів мовчання і, загалом, відповідає передачі найменшої швидкості, якої можна досягнути в системі мовного зв'язку. Хоч кадр швидкості одна восьма представляє передачу зі зниженою швидкістю в системі cdma2000, кадр швидкості одна восьма все ж містить ненульову кількість бітів трафіка. Протягом визначених інтервалів, наприклад, відносно довгих періодів відсутності мовної активності і постійного фонового шуму, навіть передачі кадрів швидкості одна восьма можуть без необхідності витратити значний рівень потужності передачі в системі. Це може призводити до зростання рівня перешкоди для інших користувачів, тим самим знижуючи пропускну здатність системи. Бажано забезпечити методи додаткового зниження швидкості передачі в системі мовного зв'язку нижче тієї, яка може забезпечити передачі кадрів мінімальної швидкості, наприклад, передачі кадрів швидкості одна восьма. Згідно з іншим аспектом системи бездротового зв'язку, в передачах між двома пристроями часто використовується деяка міра надмірності для запобігання від помилок в прийнятих сигналах. Наприклад, в передачі прямої лінії зв'язку (FL) від базової станції (BS) на мобільну станцію (MS) в системі бездротового зв'язку cdma2000, можна використовувати надмірності, наприклад, кодування символів на дробовій швидкості і повторення символів. У системі cdma2000, кодовані символи групуються в підсегменти, відомі як групи керування потужністю (PCG), і передаються по радіоканалу, причому фіксовану кількість PCG визначає кадр. Хоч методи символьної надмірності, наприклад, що застосовуються в cdma2000, дозволяють точно відновлювати передані сигнали при наявності помилок, такі методи також призводять до збільшення загальної потужності передачі системи при хороших умовах прийому сигналу, що також може призводити до зниження пропускної здатності системи. Бажано також забезпечити ефективні методи, наприклад, закінчення передачі кадру у разі визначення, що приймач точно відновив інформацію, зв'язану з цим кадром, що дозволило б 1 UA 102398 C2 5 10 15 20 25 30 35 40 45 50 55 зекономити потужність передачі і підвищити пропускну здатність системи. Бажано також забезпечити модифіковані схеми керування потужністю для здійснення таких методів. Міжнародна публікація WO 00/62456, названа "Apparatus and Method for Gated Transmission in a CDMA Communication System", загалом належить до стробованої передачі в системі CDMA, в якій керуюча інформація, яка включає пілот-сигнали, передається тільки в попередньо визначених групах керування живленням. Залежно від робочого циклу, передачі можуть бути обмежені визначеними групами керування живленням, наприклад з робочим циклом 1/4, при якому передачі відбуваються тільки в чверті груп керування живленням. Патент США US 6,917,607, названий "Apparatus and Method for Gated Transmission in a CDMA Communication System", загалом належить до стробованої передачі в системі CDMA, в якій мобільна станція передає зворотний пілот-сигнал на зворотній швидкості стробування, яка відрізняється від прямої швидкості стробування в режимі стробування, і в якій базова станція передає прямий пілот-сигнал на прямій швидкості стробування, яка відрізняється від прямої швидкості стробування в режимі стробування. Патент США US 7,466,666, названий "Forward ACK/NACK Channel for CDMA System", загалом належить до системи CDMA, в якій базова станція отримує кадри даних від мобільної станції і вибірково стробує радіоканал фізичного рівня, щоб забезпечити індикацію АСК та NACK, у відповідь на кадри даних, отримані від мобільної станції. Радіоканал фізичного рівня відкривається, щоб забезпечити або індикацію АСК або NACK мобільної станції і закривається, щоб забезпечити іншу індикацію мобільної станції. Суть винаходу Згідно з одним аспектом даного винаходу, передбачений спосіб зв'язку з використанням шаблону стробованого пілот-сигналу, що містить етапи, на яких: приймають RX-кадр, причому RX-кадр форматований в сукупність підсегментів; визначають, чи переданий прийнятий пілотсигнал, зв'язаний з RX-кадром, згідно з першим шаблоном стробованого пілот-сигналу; і, якщо визначено, що прийнятий пілот-сигнал переданий згідно з першим шаблоном стробованого пілот-сигналу, обробляють RX-кадр як кадр нульової швидкості. Згідно з іншим аспектом даного винаходу передбачений спосіб зв'язку з використанням шаблону стробованого пілот-сигналу, що містить етапи, на яких: приймають RX-кадр, причому RX-кадр форматований в сукупність підсегментів; передають ТХ-кадр, причому ТХ-кадр форматований в сукупність підсегментів, причому на етапі передачі передають пілот-сигнал згідно з першим шаблоном стробованого пілот-сигналу, якщо ТХ-кадр є кадром нульової швидкості. Згідно зі ще одним аспектом даного винаходу передбачений пристрій для зв'язку з використанням шаблону стробованого пілот-сигналу, що містить: приймач, призначений для прийому RX-кадру, причому RX-кадр форматований в сукупність підсегментів; процесор, призначений для визначення, чи переданий прийнятий пілот-сигнал, зв'язаний з RX-кадром, згідно з першим шаблоном стробованого пілот-сигналу, причому процесор додатково призначений для обробки RX-кадру як кадру нульової швидкості, якщо визначено, що прийнятий пілот-сигнал переданий згідно з першим шаблоном стробованого пілот-сигналу. Згідно зі ще одним аспектом даного винаходу передбачений пристрій для зв'язку з використанням шаблону стробованого пілот-сигналу, що містить: приймач, призначений для прийому RX-кадру, причому RX-кадр форматований в сукупність підсегментів; передавач, призначений для передачі ТХ-кадру, причому ТХ-кадр форматований в сукупність підсегментів, причому передавач додатково призначений для передачі пілот-сигналу згідно з першим шаблоном стробованого пілот-сигналу, якщо ТХ-кадр є кадром нульової швидкості. Згідно зі ще одним аспектом даного винаходу передбачений пристрій для керування потужністю передачі, що містить: засіб для прийому RX-кадру, причому RX-кадр форматований в сукупність підсегментів; засіб для визначення, чи потрібно обробляти RX-кадр як кадр нульової швидкості; засіб для передачі ТХ-кадру, причому ТХ-кадр форматований в сукупність підсегментів; і засіб для регулювання потужності передачі підсегмента ТХ-кадру відповідно до команди керування потужністю, прийнятою в RX-кадрі. Згідно зі ще одним аспектом даного винаходу передбачений комп'ютерозчитуваний носій інформації, де зберігаються інструкції, що призначають комп'ютеру керувати потужністю передачі, причому на носії додатково зберігаються інструкції, що призначають комп'ютеру: приймати RX-кадр, причому RX-кадр форматований в сукупність підсегментів; визначати, чи переданий прийнятий пілот-сигнал, зв'язаний з RX-кадром, згідно з першим шаблоном стробованого пілот-сигналу; і, якщо визначено, що прийнятий пілот-сигнал переданий згідно з першим шаблоном стробованого пілот-сигналу, обробляти RX-кадр як кадр нульової швидкості. 2 UA 102398 C2 5 10 15 20 25 30 35 40 45 50 55 Згідно зі ще одним аспектом даного винаходу передбачений комп'ютерозчитуваний носій інформації, де зберігаються інструкції, що призначають комп'ютеру керувати потужністю передачі, причому на носії додатково зберігаються інструкції, що призначають комп'ютеру: приймати RX-кадр, причому RX-кадр форматований в сукупність підсегментів; передавати ТХкадр, причому ТХ-кадр форматований в сукупність підсегментів, причому інструкція, що призначає комп'ютеру передавати ТХ-кадр, містить інструкції, що призначають комп'ютеру передавати пілот-сигнал згідно з першим шаблоном стробованого пілот-сигналу, якщо ТХ-кадр є кадром нульової швидкості. Короткий опис креслень Фіг. 1 - традиційна система бездротового зв'язку. Фіг. 2 - традиційний тракт передачі сигналу для мовного сигналу. Фіг. З - ілюстративний варіант здійснення тракту передачі сигналу для мовного сигналу згідно з даним винаходом. Фіг. 4 - ілюстративний варіант здійснення алгоритму, який може застосовуватися модулем систематичного обнулення. Фіг. 5 і 5А - ілюстративні послідовності передачі кадру, що обробляються вокодером і модулем систематичного обнулення. Фіг. 6 - ілюстративний варіант здійснення алгоритму прийому для обробки сигналів, що систематично обнуляються, що генеруються на тракті передачі мовного сигналу, наприклад, показаного на фіг. 3. Фіг. 7 - альтернативний ілюстративний варіант здійснення тракту передачі сигналу для мовного сигналу згідно з даним винаходом. Фіг. 8 - ілюстративний варіант здійснення алгоритму, який може застосовуватися модулем систематичного обнулення. Фіг. 9 і 9А - ілюстративні послідовності передачі кадру, що обробляються вокодером і модулем систематичного обнулення. Фіг. 10 - ілюстративний варіант здійснення способу систематичного обнулення згідно з даним винаходом. Фіг. 11 - ілюстративний варіант здійснення схеми стробованого пілот-сигналу згідно з даним винаходом. Фіг. 12 - ілюстративний варіант здійснення схеми керування потужністю зі зниженою швидкістю для керування потужністю передач прямої лінії зв'язку (FL) згідно з даним винаходом. Фіг. 13 - ілюстративний варіант здійснення схеми керування потужністю зі зниженою швидкістю для керування потужністю безперервних пілотних передач зворотної лінії зв'язку (RL) згідно з даним винаходом. Фіг. 14 ілюстративний варіант здійснення схеми керування потужністю зі зниженою швидкістю для керування потужністю стробованих пілотних передач зворотної лінії зв'язку (RL) згідно з даним винаходом. Фіг. 15 - спосіб керування потужністю згідно з даним винаходом. Фіг. 16 - традиційна схема обробки кадрів для обробки інформаційних бітів на передавачі в системі зв'язку. Фіг. 17 - часові діаграми, пов'язані з традиційною схемою сигналізації прямої лінії зв'язку для cdma2000. Фіг. 18 - традиційний спосіб відновлення оцінних інформаційних бітів b' з прийнятих символів у. Фіг. 19 - ілюстративний варіант здійснення схеми для раннього закінчення передач прямої лінії зв'язку для систем, що працюють згідно зі стандартом cdma2000. Фіг. 20 - ілюстративний варіант здійснення схеми попідсегментного декодування згідно з даним винаходом. Фіг. 21 - реалізація традиційного тракту обробки символів прямої лінії зв'язку для Radio Configuration 4 (RC4) згідно зі стандартом cdma2000, а також ілюстративний варіант здійснення тракту обробки символів прямої лінії зв'язку згідно з даним винаходом. Фіг. 22 - ілюстративний варіант здійснення схеми сигналізації, використовуваної для сигналізації повідомлення АСК на зворотній лінії зв'язку для модулятора раннього закінчення. Фіг. 23 - ілюстративний варіант здійснення схеми для раннього закінчення передач зворотної лінії зв'язку для систем, що працюють згідно зі стандартом cdma2000. Фіг. 24 - реалізація традиційного тракту обробки символів зворотної лінії зв'язку, а також ілюстративний варіант здійснення тракту обробки символів зворотної лінії зв'язку згідно з даним винаходом. 3 UA 102398 C2 5 10 15 20 25 30 35 40 45 50 55 60 Фіг. 25 - ілюстративний варіант здійснення схеми сигналізації використовуваної для сигналізації повідомлення АСК на зворотній лінії зв'язку для раннього закінчення прямого основного каналу (F-FCH) і/або до двох прямих додаткових каналів (F-SCH1 і F-SCH2). Фіг. 26 - ілюстративний варіант здійснення способу згідно з даним винаходом. Докладний опис Докладний опис, наведений нижче з посиланням на прикладені креслення, використаний описувати ілюстративні варіанти здійснення даного винаходу, і не повинен представляти тільки ілюстративні варіанти здійснення, в яких даний винахід можна здійснювати на практиці. Термін "ілюстративний", використовуваний в цьому описі означає "служить як приклад, примірник або ілюстрація", і не обов'язково означає яку-небудь перевагу над іншими ілюстративними варіантами здійснення. Докладний опис включає в себе конкретні деталі, що забезпечують повне розуміння ілюстративних варіантів здійснення винаходу. Фахівцеві в даній галузі техніки очевидно, що ілюстративні варіанти здійснення винаходу можна здійснювати на практиці без цих конкретних деталей. У ряді випадків, загальновідомі структури і пристрої зображені у вигляді блок-схеми для уникнення затемнення ознак новизни представлених тут ілюстративних варіантів здійснення. Коли, в цьому описі винаходу і у формулі винаходу, вказано, що елемент "з'єднаний з" іншим елементом або "підключений до" нього, передбачається, що він може бути безпосередньо з'єднаний з іншим елементом або підключений до нього, або можуть бути присутніми проміжні елементи. Навпаки, коли вказано, що елемент "безпосередньо з'єднаний з" іншим елементом або "безпосередньо підключений до" нього, проміжні елементи відсутні. Системи зв'язку можуть використовувати одну несучу частоту або множинні несучі частоти. Згідно з фіг. 1, в системі 100 бездротового стільникового зв'язку, позиції 102А - 102G позначають стільники, позиції 160А - 160G позначають базові станції, і позиції 106А - 106G позначають термінали доступу (AT). Канал зв'язку включає в себе пряму лінію зв'язку (FL) (також відому як низхідну лінію зв'язку) для передач від мережі доступу (AN) 160 на термінал доступу (AT) 106 і зворотну лінію зв'язку (RL) (також відому як висхідну лінію зв'язку) для передач від AT 106 на AN 160. AT 106 також відомий як віддалена станція, мобільна станція або абонентська станція. Термінал доступу (AT) 106 може бути мобільним або стаціонарним. Кожна лінія зв'язку може включати в себе ту або іншу кількість несучих частот. Крім того, термінал доступу 106 може являти собою будь-який пристрій даних, який здійснює зв'язок по бездротовому каналу або по дротовому каналу, наприклад, з використанням оптоволоконних або коаксіальних кабелів. Термінал доступу 106 додатково може являти собою будь-який з різнотипних пристроїв, в тому числі, але без обмеження, карту PC, карту CF, зовнішній або внутрішній модем, або бездротовий або дротовий телефон. Сучасні системи зв'язку дозволяють множинним користувачам здійснювати доступ до загального середовища зв'язку. У техніці відомі численні методи множинного доступу, наприклад множинного доступу з часовим розділенням (TDMA), множинного доступу з частотним розділенням (FDMA), множинного доступу з просторовим розділенням, множинного доступу з поляризаційним розділенням, множинного доступу з кодовим розділенням (CDMA) та інші аналогічні методи множинного доступу. Концепція множинного доступу передбачає методологію виділення каналів, яка дозволяє множинним користувачам здійснювати доступ до загальної лінії зв'язку. Виділення каналів може приймати різні форми залежно від конкретного методу множинного доступу. У порядку прикладу, в системах FDMA, повний спектр частот ділиться на деяку кількість менших піддіапазонів, і кожному користувачеві призначається його власний піддіапазон для доступу до лінії зв'язку. Альтернативно, в системах TDMA, кожний користувач отримує весь спектр частот протягом часових слотів, що періодично повторюються. У системах CDMA, кожний користувач отримує весь спектр частот протягом всього часу, але його передача ідентифікується з використанням коду. Хоч певні ілюстративні варіанти здійснення даного винаходу можуть бути описані нижче для роботи згідно зі стандартом cdma2000, фахівцеві в даній галузі техніки очевидно, що методи можна легко застосовувати до інших цифрових систем зв'язку. Наприклад, методи даного винаходу також можна застосовувати до систем на основі стандарту бездротового зв'язку WCDMA (або 3gpp) і/або будь-яких інших стандартів зв'язку. Такі альтернативні ілюстративні варіанти здійснення розглядаються як такі, що знаходяться в об'ємі даного винаходу. На фіг. 2 показаний традиційний тракт 200 передачі сигналу для мовного сигналу. Згідно з фіг. 2, мовний сигнал 200а надходить на вокодер 210, який кодує мовний сигнал для передачі. Мовний кадр 210а, що виводиться вокодером 210, може приймати одну із сукупності швидкостей, залежно від мовного контенту мовного сигналу 200а в будь-який час. Згідно з фіг. 2, сукупність швидкостей включає в себе повну швидкість (FR), половинну швидкість (HR), 4 UA 102398 C2 5 10 15 20 25 30 35 40 45 50 55 60 четвертинну швидкість (QR) і швидкість одна восьма (ER). Мовний кадр 210а надходить на модуль 220 обробки фізичного рівня, який підготовляє дані мовного кадру для передачі згідно з протоколами фізичного рівня системи. Фахівцеві в даній галузі техніки очевидно, що такі протоколи можуть включати в себе, наприклад, кодування, повторення, перфорування, перемежовування і/або модулювання даних. Вихідний сигнал модуля 220 обробки фізичного рівня надходить на передавач 230 для передачі. Передавач 230 може здійснювати радіочастотні (РЧ) операції наприклад, підвищення частоти сигналу до несучої частоти і посилення сигналу для передачі через антену (не показана). У загальному випадку, швидкість мовного кадру 210а, вибрана вокодером 210 для кодування мовного сигналу 200а в будь-який час може залежати від рівня мовної активності, виявленого в мовному сигналі 200а. Наприклад, повна швидкість (FR) може бути вибрана для кадрів, протягом яких мовний сигнал 200а містить активну мову, тоді як швидкість одна восьма (ER) може бути вибрана для кадрів, протягом яких мовний сигнал 200а містить мовчання. Протягом таких періодів мовчання, кадр ER може містити параметри, що характеризують "фоновий шум", зв'язаний з мовчанням. Хоча кадр ER містить значно менше бітів, ніж кадр FR, періоди мовчання можуть відбуватися досить часто в ході нормальної розмови, в зв'язку з чим, значна частина повної смуги передачі відводиться для передачі кадрів ER. Бажано додатково скоротити смугу передачі, необхідну для перенесення мовного сигналу 200а на приймач. На фіг. 3 показаний ілюстративний варіант здійснення тракту 300 передачі сигналу для мовного сигналу згідно з даним винаходом. Згідно з фіг. 3, мовний сигнал 200а надходить на вокодер 310, який генерує мовний кадр 310а для передачі. Мовний кадр 310а може приймати одну із сукупності швидкостей, включаючи повну швидкість (FR), половинну швидкість (HR), четвертинну швидкість (QR), швидкість одна восьма (ER) і критичну швидкість одна восьма (ERC). В ілюстративному варіанті здійснення, вказування кадру швидкості одна восьма як кадр "критичної" швидкості одна восьма може вироблятися вокодером 310 для тих кадрів швидкості одна восьма, які містять параметри відповідні, наприклад, зміні фонового шуму, що реєструється протягом інтервалу мовчання. Мовний кадр 310а надходить на модуль 315 систематичного обнулення, який, в свою чергу, видає оброблений мовний кадр 315а на модуль 220 обробки фізичного рівня. Як додатково описано нижче, модуль 315 систематичного обнулення призначений для мінімізації бітової швидкості передачі вихідного сигналу вокодера 310а шляхом вибіркового "обнулення" вихідного сигналу вокодера, тобто заміни визначених кадрів вихідного сигналу 310а вокодера кадрами нульової швидкості (NR), швидкість передачі даних яких менша, ніж у кадра швидкості одна восьма. В ілюстративному варіанті здійснення, кадри NR можуть мати нульовий контент трафіка, тобто бітову швидкість трафіка 0 бітів за секунду (біт/с). На фіг. 4 показаний ілюстративний варіант здійснення 400 алгоритму, який може застосовуватися модулем 315 систематичного обнулення. На етапі 410, модуль 315 систематичного обнулення приймає кадр 310а від вокодера З10. На етапі 420, кадр 310а оцінюється для визначення, чи є він кадром FR, HR, QR або ER-C. Такі швидкості розглядаються як критичні для передачі, і також можуть називатися критичними типами кадрів. Якщо кадр 310а містить одну з цих критичних швидкостей, то кадр 310а безпосередньо надходить на модуль 220 обробки фізичного рівня для передачі. Якщо ні, то вважається, що кадр містить некритичну швидкість, і алгоритм переходить до етапу 430. Відмітимо, що ілюстративне вказування FR, HR, QR і ER-C як "критичної" застосовується виключно в ілюстративних цілях, і воно не має наміру обмежувати об'єм даного винаходу тільки тими варіантами здійснення, в яких такі типи кадрів вказані як критичні. У альтернативних ілюстративних варіантах здійснення, інші набори типів кадрів можуть вказуватися як критичні для передачі модулем систематичного обнулення. Такі альтернативні ілюстративні варіанти здійснення розглядаються як такі, що знаходяться в об'ємі даного винаходу. На етапі 430, алгоритм оцінює номер кадру поточного кадру, що підлягає передачі для визначення, чи гарантована передача поточного кадру. В ілюстративному варіанті здійснення, гарантована передача може включати в себе передачу ненульової швидкості (наприклад, не NR). В ілюстративному варіанті здійснення, номер кадру може являти собою номер, що надається кожному кадру, який безперервно повторюється для кожного подальшого кадру. У показаному ілюстративному варіанті здійснення, поточний номер кадру FrameNumber додається до поточного зміщення кадру FrameOffset, і результат (FrameNumber + FrameOffset) застосовується до операції по модулю (mod) з параметром інтервалу без обнулення N. Якщо результат операції по модулю дорівнює 0, то алгоритм переходить до етапу 440. У іншому випадку, алгоритм переходить до етапу 450. 5 UA 102398 C2 5 10 15 20 25 30 35 40 45 50 55 60 Фахівцеві в даній галузі техніки очевидно, що методи, відмінні від конкретного оцінювання, показаного на етапі 430, можна легко застосовувати для вказування, передача яких кадрів гарантована. Такі альтернативні методи можуть використовувати, наприклад, параметри, відмінні від поточного номера кадру або поточного зміщення кадру, або операції, відмінні від описаних операцій по модулю. На етапі 450, модуль 315 систематичного обнулення видає кадр нульової швидкості (NR) на модуль 220 обробки фізичного рівня для передачі. В ілюстративному варіанті здійснення, кадр нульової швидкості має швидкість передачі даних трафіка 0 біт/с (бітів за секунду), і, таким чином, витрачає мінімальну смугу сигналізації. Після передачі кадру нульової швидкості, алгоритм повертається до етапу 410 для прийому наступного мовного кадру 310а від вокодера 310. На основі вищенаведеного опису, фахівцеві в даній галузі техніки очевидно, що інтервал без обнулення N визначає, наскільки часто передаються некритичні кадри, причому N=1 відповідає передачі всіх некритичних кадрів, і вищі значення N відповідають менш частим передачам некритичних кадрів. В ілюстративному варіанті здійснення, N може приймати значення 1, 4 за умовчанням, 8, або інші вказані зарезервовані значення, наприклад, за допомогою зовнішньої сигналізації (не показана). На фіг. 5 і 5А показані ілюстративні послідовності передачі кадру 310а* і 315а* відповідно, що обробляються вокодером 310 і модулем систематичного обнулення 315. Згідно з фіг. 5, послідовність 310а* кадрів включає в себе кадри швидкості одна восьма, відмічені як "ER", і кадри критичної швидкості одна восьма, відмічені як "ER-C." Така послідовність кадрів може виникати в ході мовної розмови, наприклад, періоду мовчання однієї сторони розмови. Згідно з фіг. 5А, послідовність 315а* передачі кадру відповідає результату застосування алгоритму вибіркового обнулення, наприклад 400, до послідовності 310а* передачі, в якій використовується інтервал без обнулення N=4. Згідно з фіг. 5А, послідовність 315а* кадрів включає в себе кадри швидкості одна восьма ER і кадри нульової швидкості NR. FrameNum 0 передається безпосередньо таким, як він прийнятий від вокодера 310, тобто, як кадр ER. Значення FrameNum 1 і З передаються як кадри NR відповідно до інтервалу без обнулення N=4. FrameNum 2, вказаний вокодером як критичний кадр швидкості одна восьма ER-C, передається як кадр ER. Значення FrameNum з 4 по 13 обробляються аналогічним чином. Відмітимо, що на фіг. 5А кадри, відповідні (FrameNum + FrameOffset mod N)=0 відмічені. На фіг. 6 показаний ілюстративний варіант здійснення алгоритму прийому 600 для обробки сигналів, що генеруються трактом передачі мовного сигналу, де використовується модуль систематичного обнулення, наприклад 315, показаний на фіг. 3. Згідно з фіг. 6, на етапі 610, переданий сигнал приймається (RX) і обробляється з використанням, наприклад, операцій, додаткових до операцій ТХ 230, наприклад, показаних на фіг. 3. Такі операції RX можуть включати в себе, наприклад, РЧ-посилення, пониження частоти, фільтрацію і т. д. На етапі 620, обробка прийому (RX) фізичного рівня здійснюється з використанням, наприклад, операцій, додаткових до операцій 220 ТХ фізичного рівня, показаних на фіг. 3. Така обробка прийому фізичного рівня може включати в себе, наприклад, декодування, деперемежовування, комбінування символів, і т. д. На етапі 630, алгоритм 600 оцінює, чи є поточний прийнятий кадр кадром NR. Якщо так, то алгоритм повертається до етапу 610, щоб почати приймати наступний кадр, в зв'язку з відсутністю даних трафіка, що підлягають обробці, в кадрі NR. Якщо ні, то алгоритм переходить до етапу 640. Фахівцеві в даній галузі техніки очевидно, що можна застосовувати різні методи для оцінювання, чи є поточний прийнятий кадр кадром NR. В ілюстративному варіанті здійснення, можна застосовувати алгоритм оцінювання енергії для виявлення енергії в трафіковій частині прийнятого кадру. Наприклад, енергію, відповідну трафіковій частині прийнятого кадру, можна вимірювати і порівнювати з відповідним чином масштабованим порогом енергії. Якщо виміряна енергія менша порогу, то можна оголосити кадр NR, оскільки, в ілюстративному варіанті здійснення, не очікується передачі сигналу передавачем в трафіковій частині кадру NR. Такі алгоритми оцінювання енергії також можуть використовувати інформацію про алгоритм систематичного обнулення та інтервал без обнулення N, використовуваних передавачем, для додаткової допомоги при виявленні кадрів NR. Відмітимо, що попередній опис можливих алгоритмів виявлення NR наведений виключно в ілюстративних цілях, і не має наміру обмежувати об'єм даного винаходу якими-небудь конкретними алгоритмами виявлення NR. 6 UA 102398 C2 5 10 15 20 25 30 35 40 45 50 55 На етапі 640, параметр прийнятого кадру не NR можна використовувати для оновлення алгоритму керування потужністю по зовнішньому циклу (OLPC) на приймачі. В ілюстративному варіанті здійснення, параметр прийнятого кадру не NR може включати в себе, наприклад, результат визначення, чи пройшов індикатор якості кадру (FQI), наприклад, CRC для прийнятого кадру, контроль якості. Фахівцеві в даній галузі техніки очевидно, що алгоритм OLPC можна використовувати, наприклад, для обчислення належної контрольної точки відношення сигнал/перешкода (SIR) для прийнятих кадрів, яку можна використовувати для керування механізмом зворотного зв'язку для керування потужністю між передавачем і приймачем для переданих мовних кадрів. Виключаючи результати контролю якості, виведені з кадрів NR, можна правильно оновлювати алгоритм OLPC з використанням, наприклад, тільки кадрів, що мають значну енергію, що передається для трафікової частини. На етапі 650, мовний кадр можна декодувати в мовний вихідний сигнал 650а, і алгоритм 600 повертається до етапу 610 для прийому наступного кадру. На фіг. 7 показаний альтернативний ілюстративний варіант здійснення тракту 70 передачі сигналу 0 для мовного сигналу згідно з даним винаходом. Згідно з фіг. 7, мовний сигнал 200а надходить на вокодер 710, який генерує мовний кадр 710а для передачі. Мовний кадр 710а може приймати одну із сукупності швидкостей, включаючи повну швидкість (FR), половинну швидкість (HR), четвертинну швидкість (QR), швидкість одна восьма (ER), і нульову швидкість вокодера (VNR). Кадр VNR, також відомий як кадр вокодера нульової швидкості або пустий кадр вокодера, генерується вокодером 710 у відсутність нової інформації, що підлягає передачі вокодером. В ілюстративному варіанті здійснення, кадр VNR може бути просто пустим кадром, що не містить дані. Мовний кадр 710а надходить на модуль 715 систематичного обнулення, який, в свою чергу, видає оброблений мовний кадр 715а на модуль 220 обробки фізичного рівня. Як додатково описано нижче, модуль 715 систематичного обнулення призначений для мінімізації бітової швидкості передачі вихідного сигналу вокодера 710а шляхом вибіркової заміни визначених кадрів вихідного сигналу 710а вокодера кадрами нульової швидкості (NR) або індикатора нульової швидкості (NRID), що мають незначний або ніякого контенту даних. На фіг. 8 показаний ілюстративний варіант здійснення 800 алгоритму, який може застосовуватися модулем 715 систематичного обнулення. На етапі 810, модуль 715 систематичного обнулення приймає кадр 710а від вокодера710. На етапі 820, кадр 710а оцінюється для визначення, чи є він кадром FR, HR, QR або ER. Такі швидкості розглядаються як критичні для передачі. Якщо кадр 710а містить одну з цих критичних швидкостей, то кадр 710а надходить на модуль 220 обробки фізичного рівня для передачі на етапі 840. Якщо ні, то вважається, що кадр містить некритичну швидкість, і алгоритм переходить до етапу 830. На етапі 830, алгоритм оцінює поточний номер кадру передачі для визначення, чи необхідна ненульова передача. У показаному ілюстративному варіанті здійснення, поточний номер кадру FrameNumber додається до поточного зміщення кадру FrameOffset, і результат (FrameNumber + FrameOffset) застосовується до операції по модулю (mod) з параметром інтервалу без обнулення N. Якщо результат операції по модулю дорівнює 0, то алгоритм переходить до етапу 835. У іншому випадку, алгоритм переходить до етапу 850. На етапі 835, може передаватися кадр індикатора нульової швидкості (NRID). Такий кадр може відповідати заздалегідь визначеному кадру або індикатору, що розпізнається приймачем як такий, що містить нову інформацію, також що називається кадром, що містить пусті дані трафіка. Пусті дані трафіка можуть містити бітовий шаблон, який не використовується вокодером, що приймає, і, таким чином, вокодер, що приймає, буде відкидати пусті дані трафіка. В одному аспекті, наприклад, заздалегідь визначений пустий кадр або індикатор може бути відомим кадром 1,8 кбіт/с, що має пусті дані трафіка. Згідно з іншим аспектом, наприклад, заздалегідь визначений кадр або індикатор може повторювати останній переданий кадр 1,8 кбіт/с, тим самим вказуючи пусті дані трафіка. На етапі 850, модуль 715 систематичного обнулення видає кадр нульової швидкості (NR) на модуль 220 обробки фізичного рівня для передачі. В ілюстративному варіанті здійснення, кадр нульової швидкості не містить бітів трафіка, і, таким чином, витрачає мінімальну смугу сигналізації. Після передачі кадру нульової швидкості, алгоритм повертається до етапу 810 для прийому наступного мовного'кадру 710а від вокодера 710. На фіг. 9 і 9А показані ілюстративні послідовності 710а* і 715а* передачі кадру відповідно, що обробляються вокодером 710 і модулем 715 систематичного обнулення. 7 UA 102398 C2 5 10 15 20 25 30 35 40 45 50 55 60 Згідно з фіг. 9, послідовність 710а* кадрів включає в себе кадри швидкості одна восьма, відмічені як "ER", і кадри вокодера нульової швидкості, відмічені як "VNR", що генеруються вокодером 710. Згідно з фіг. 9 А, послідовність 715а* передачі кадру відповідає результату застосування алгоритму вибіркового обнулення, наприклад 800 до послідовності 710а* передачі, в якій використовується інтервал без обнулення N=4. Згідно з фіг. 9А, послідовність 715а* кадрів включає в себе кадри швидкості одна восьма ER і кадри нульової швидкості NR. FrameNum 0 передається безпосередньо таким, як він прийнятий від вокодера 710, тобто як кадр ER. Значення FrameNum з 1 по З передаються як кадри NR, і FrameNum 4 передається як кадр NRID, відповідно до інтервалу без обнулення N=4. Відмітимо, що кадр NRID передається, щоб гарантувати періодичну передачу кадру ненульової швидкості, як описано з посиланням на алгоритм 800. Фахівець в даній галузі техніки може легко зрозуміти обробку FrameNum з 5 по 13 в світлі попереднього опису. На фіг. 10 показаний ілюстративний варіант здійснення способу 1000 систематичного обнулення згідно з даним винаходом. Відмітимо, що спосіб 1000 показаний виключно в ілюстративних цілях, і не має наміру обмежувати об'єм даного винаходу яким-небудь конкретним показаним способом. Згідно з фіг. 10, на етапі 1010, може вироблятися визначення наявності нової інформації трафіка, причому нова інформація трафіка підлягає включенню в кадр для передачі по бездротовій лінії зв'язку. На етапі 1020, блок прийняття рішення визначає результат визначення на етапі 1010. На етапі 1030, якщо нова інформація трафіка присутня, трафікова частина, що містить дані, які представляють нову інформацію трафіка, можуть бути додані в кадр. На етапі 1040, якщо нової інформації трафіка не існує, то новий кадр не передається, поки відповідний кадр не буде відповідати кадру, гарантованому для передачі. У цьому випадку, генерується кадр, гарантований для передачі, що включає в себе пусті дані трафіка, які розпізнаються вокодером, що приймає, як нульова швидкість передачі даних. На фіг. 11 показаний ілюстративний варіант здійснення схеми стробованого пілот-сигналу для ідентифікації передач кадрів нульової швидкості згідно з даним винаходом. Відмітимо, що схема стробованого пілот-сигналу наведена виключно в ілюстративних цілях, і не має наміру обмежувати об'єм даного винаходу системами, в яких передача кадру нульової швидкості обов'язково супроводжується стробованою пілотною передачею. На фіг. 11, трафікова частина 1110 ТХ-передачі показана спільно з пілотною частиною 1120. Можна бачити, що пілотна частина 1120 в ході передачі має інший шаблон кадру нульової швидкості, ніж в ході передачі кадру ненульової швидкості. Наприклад, згідно з фіг. 11, шаблон стробованого пілот-сигналу для пустого кадру може відповідати 2 підсегментам або PCG, в яких пілот-сигнал увімкнений (що позначено "Р" на фіг. 11), що перемежовуються з 2 підсегментами або PCG, в яких пілот-сигнал вимкнений. Використання іншого шаблону стробованого пілотсигналу в ході передач пустого кадру може додатково допомагати приймачу у визначенні, чи є кадр, прийнятий в даний момент, пустим кадром. Це можна використовувати, наприклад, на етапі 630 визначення нульової швидкості на фіг. 6. Фахівцеві в даній галузі техніки очевидно, в світлі даного винаходу, що альтернативні шаблони стробованого пілот-сигналу можна легко виводити для сигналізації присутності пустих кадрів. Наприклад, шаблон стробованого пілот-сигналу може включати в себе пілотні передачі в кожному другому підсегменті або PCG, або з використанням будь-якого іншого шаблону. Такі альтернативні методи розглядаються як такі, що знаходяться в об'ємі даного винаходу. Згідно з іншим аспектом даного винаходу, для додаткового скорочення передач сигналу в системі, можна знижувати міру керування потужністю прямої лінії зв'язку і/або зворотної лінії зв'язку системи. В ілюстративному варіанті здійснення, мобільна станція може скорочувати кількість команд керування потужністю прямої лінії зв'язку, які вона відсилає на базову станцію, наприклад, відсилаючи тільки команди керування потужністю прямої лінії зв'язку тільки протягом PCG, відповідних стробовиним пілотним передачам зворотної лінії зв'язку, навіть в кадрах, де пілотна частина зворотної лінії зв'язку безперервна (тобто не стробована). У іншому ілюстративному варіанті здійснення, базова станція може передавати команди керування потужністю зворотної лінії зв'язку зі зниженою швидкістю, наприклад, в кожній другій групі керування потужністю. Крім того, мобільна станція, що приймає ці команди керування потужністю зворотної лінії зв'язку, може застосовувати кожну з них для керування передачами непустих кадрів. Для пустих кадрів, скорочену кількість (наприклад, менше, ніж всі) прийнятих команд керування потужністю від базової станції, мобільна станція може використовувати для керування передачами пустих кадрів, наприклад, 8 UA 102398 C2 5 10 15 20 25 30 35 40 45 50 55 коли пілотна частина зворотної лінії зв'язку стробована, як описано вище. Ці ілюстративні методи керування потужністю додатково описані з посиланням на фіг. 12-14. На фіг. 12 показаний ілюстративний варіант здійснення 1200 схеми керування потужністю зі зниженою швидкістю для керування потужністю передач прямої лінії зв'язку (FL) згідно з даним винаходом. На фіг. 12, передачі (BS ТХ) 1210 базової станції показані спільно з передачами (MS TX) 1220 мобільної станції. PCG, що містять (FL) команди керування потужністю (PC) прямої лінії зв'язку, передані мобільною станцією, показані як заштриховані PCG в 1220. Висхідна стрілка відходить від кожної заштрихованої PCG і вказує на PCG прямої лінії зв'язку, що передається базовою станцією при застосуванні прийнятих команд PC FL. Наприклад, команда PC FL, передана мобільною станцією в RL PCG #3, застосовується базовою станцією при передачі FL PCG #4, і т. д. Відмітимо, що на фіг. 12, заштриховані PCG у 1220 відповідають RL PCG, в яких пілотсигнал ТХ RL увімкнений, згідно зі схемою 1100 стробованого пілот-сигналу, показаною на фіг. 11. У той же час, мобільна станція відсилає тільки команди PC FL в RL PCG, відповідних заштрихованим PCG, як позначено 1220. Мобільна станція не відсилає команди PC FL в незаштрихованих RL PCG. Таким чином, команди PC FL передаються тільки в тих RL PCG, які також передаються згідно зі схемою стробованого пілот-сигналу, незалежно від того, чи застосовується шаблон стробованого пілот-сигналу для конкретного кадру (наприклад, чи є конкретний кадр кадром нульової швидкості). Фахівцеві в даній галузі техніки очевидно, що це може спрощувати обробку PC FL, одночасно знижуючи загальну швидкість PC FL. На фіг. 13 показаний ілюстративний варіант здійснення 1300 схеми керування потужністю зі зниженою швидкістю для керування потужністю безперервних пілотних передач зворотної лінії зв'язку (RL) згідно з даним винаходом. На фіг. 13, PCG, що містять команди керування потужністю (PC) прямої лінії зв'язку (RL), передані базовою станцією, показані як заштриховані PCG в 1310. Низхідна стрілка виходить з кожної заштрихованої PCG і вказує на PCG зворотної лінії зв'язку, що передається мобільною станцією, яка застосовує відповідні прийняті команди PC RL. Наприклад, команда PC RL, відправлена базовою станцією в FL PCG #3, застосовується мобільною станцією при передачі RL PCG #4, і т. д. Згідно з фіг. 13, базова станція відсилає тільки команди PC RL в FL PCG, відповідних заштрихованим PCG, що визначено як 1310. Базова станція не відсилає команди PC RL в незаштрихованих PCG. На фіг. 14 показаний ілюстративний варіант здійснення 1400 схеми керування потужністю зі зниженою швидкістю для керування потужністю стробованих пілотних передач зворотної лінії зв'язку (RL) згідно з даним винаходом. На фіг. 14, PCG, що містять команди керування потужністю (PC) прямої лінії зв'язку (RL), передані базовою станцією, знову показані як заштриховані PCG в 1410. Суцільна низхідна стрілка відходить від заштрихованої PCG і вказує на PCG зворотної лінії зв'язку, що передається мобільною станцією, яка застосовує відповідні прийняті команди PC RL. З іншого боку, пунктирна стрілка, що відходить від заштрихованої PCG, вказує команду PC RL, передану базовою станцією, яку MS не застосовує до відповідної вказаної RL PCG. Базова станція відсилає тільки команди PC RL в FL PCG, відповідних заштрихованим PCG. Базова станція не відсилає команди PC RL в незаштрихованих PCG. Наприклад, команда PC RL, відправлена базовою станцією в FL PCG #1, застосовується мобільною станцією при передачі RL PCG #3, і т. д. З іншого боку, команда PC RL, відправлена базовою станцією в FL PCG #2, не застосовується мобільною станцією при передачі RL PCG #4. Замість цього, в ілюстративному варіанті здійснення, мобільна станція може підтримувати той же рівень потужності, що і в попередній PCG, наприклад, RL PCG #3, в описаному прикладі. Згідно з аспектом даного винаходу, це можна робити для спрощення обробки команд PC RL на мобільній станції. На фіг. 15 показаний спосіб 1500 керування потужністю згідно з даним винаходом. Відмітимо, що спосіб 1500 показаний виключно в ілюстративних цілях і не має наміру обмежувати об'єм даного винаходу. На етапі 1510, приймається поточний кадр, причому кадр форматований в сукупність підсегментів. На етапі 1520, прийнятий кадр обробляється згідно з протоколами фізичного рівня. На етапі 1530, приймається команда керування потужністю, прийнята в підсегменті, призначеному для передачі згідно з першим шаблоном стробованого пілот-сигналу. 9 UA 102398 C2 5 10 15 20 25 30 35 40 45 50 55 На етапі 1540, потужність передачі підсегмента ТХ, що слідує за вказаним підсегментом, регулюється згідно з прийнятою командою керування потужністю, причому підсегмент ТХ переданий згідно з другим шаблоном стробованого пілот-сигналу. Згідно з іншим аспектом даного винаходу, передбачені методи для раннього закінчення передач прямої і/або зворотної лінії зв'язку в системі бездротового зв'язку для економії потужності і підвищення пропускної здатності. На фіг. 16 показана традиційна схема обробки кадрів для обробки інформаційних бітів 1600b на передавачі в системі зв'язку. У деяких ілюстративних варіантах здійснення, показану схему обробки кадрів можна використовувати в передачах прямої лінії зв'язку або зворотній лінії зв'язку системи бездротового зв'язку. На фіг. 16А показаний стан даних, що обробляються згідно з операціями, показаними на фіг. 16. Відмітимо, що схема обробки кадрів показана виключно в ілюстративних цілях і не має наміру обмежувати об'єм даного винаходу якою-небудь конкретною показаною схемою обробки. Альтернативні ілюстративні варіанти здійснення даного винаходу можуть приймати альтернативні схеми обробки кадрів, які можуть, наприклад, змінювати порядок проходження етапів схеми, показаної на фіг. 16, і/або додавати етапи в показану схему або видаляти етапи з неї. Такі альтернативні ілюстративні варіанти здійснення розглядаються як такі, що знаходяться в об'ємі даного винаходу. Згідно з фіг. 16, джерело інформації генерує інформаційні біти 1600b на вибраній швидкості R. Кількість інформаційних бітів 1600b, що генеруються з розрахунку на кадр, може залежати від вибраної швидкості R. Наприклад, в системі cdma2000, передбачено 172 інформаційних бітів на 20-мілісекундний кадр ("повна швидкість"), 80 бітів на кадр ("половинна швидкість"), 40 бітів на кадр ("четвертинна швидкість") або 16 бітів на кадр ("швидкість одна восьма"). Інформаційні біти 1600b для кадру сукупно позначаються змінною b на фіг. 16А. На етапі 1600, індикатор якості кадру (FQI) може генеруватися і приєднуватися до інформаційних бітів 1600b для кадру. Наприклад, FQI може являти собою циклічний надмірний код (CRC), відомий фахівцеві в даній галузі техніки . Сигнал 1600а представляє комбінацію інформаційних бітів 1600b і FQI, що також показано на фіг. 16А. На етапі 1610, кінцева комбінація бітів кодера може додаватися до сигналу 1600а. Наприклад, кінцева комбінація бітів кодера може представляти фіксовану кількість нульових кінцевих бітів для використання в надточному кодері. Сигнал 1610а представляє комбінацію сигналу 1600а з кінцевою комбінацією бітів кодера, що також показано на фіг. 16А. На етапі 1620, сигнал 1610а кодується і повторюється (або перфорується). Як описано вище, кодування може включати в себе надточне кодування або турбо-кодування, і повторення може служити для додаткового підвищення (або зниження, у разі перфорування) енергії, що передається, зв'язаної з кожним символом. Відмітимо, що кодування може застосовувати інші методи, відомі фахівцеві в даній галузі техніки, наприклад блокове кодування або інші типи кодування, і не повинне обмежуватися кодуванням, безпосередньо описаним в даному винаході. Сигнал 1620а представляє кодовану і повторювану (або перфоровану) версію сигналу 1610а, що також показано на фіг. 16А. На етапі 1630, сигнал 1620а перемежовується, наприклад, для підвищення рознесення кодованих символів у вибраному вимірюванні сигналу. У ілюстративній реалізації, символи можуть перемежовуватися за часом. Сигнал 1630а представляє перемежовану версію сигналу 1620а, що також показано на фіг. 16A. На етапі 1640, перемежовані символи сигналу 1630а відображаються в заздалегідь визначений формат кадру, що також показано на фіг. 16А. Формат кадру може вказувати, що кадр складається із сукупності підсегментів. В ілюстративному варіанті здійснення, підсегментами можуть бути будь-які частини кадру, що слідують один за одним в даному вимірюванні, наприклад, часовому, частотному, кодовому або будь-якому іншому вимірюванні. Кадр може складатися з фіксованої сукупності таких підсегментів, причому кожний підсегмент містить частину повної кількості символів, виділених кадру. Наприклад, в ілюстративному варіанті здійснення, згідно зі стандартом W-CDMA, підсегмент може бути заданий як слот. В ілюстративному варіанті здійснення, згідно зі стандартом cdma2000, підсегмент може бути заданий як група керування потужністю (PCG). У деяких ілюстративних варіантах здійснення, перемежовані символи можуть відображатися у часовому, частотному, кодовому або будь-якому іншому вимірюванні, використовуваному для передачі сигналу. Крім того, формат кадру також може вказувати включення, наприклад, контрольних символів (не показані) спільно з перемежованими символами сигналу 1630а. Такі контрольні символи можуть включати в себе, наприклад, символи керування потужністю, 10 UA 102398 C2 5 10 15 20 25 30 35 40 45 50 55 60 символи інформації формату кадру і т. д. Сигнал 1640а представляє вихідний сигнал етапу 1640 відображення символу в кадр, що також показано на фіг. 16А. На етапі 1650, здійснюється модулювання однієї або декількох несучих хвиль, наприклад, сигналом 1640а. У деяких ілюстративних варіантах здійснення, на етапі модуляції можна застосовувати, наприклад, QAM (квадратурну амплітудну модуляцію), QPSK (квадратурну фазову маніпуляцію), і т. д. Сигнал 1650а представляє модульовану версію сигналу 1640а, що також показано на фіг. 16А. Сигнал 1650а додатково позначається як змінна х на фіг. 16А. На етапі 1660, модульований сигнал 1650а додатково обробляється, передається по радіоканалу і приймається приймачем. На етапі 1660 генеруються прийняті символи 1700а, додатково позначені як змінна у на фіг. 16А. Відмітимо, що фахівцеві в даній галузі техніки очевидно, що методи для обробки сигналу 1650а для радіопередачі і прийому загальновідомі, і тут додатково не розкриваються. Символи, що містяться в у, можна додатково обробляти, як описано нижче. На фіг. 17 показані часові діаграми, пов'язані з традиційною схемою сигналізації прямої лінії зв'язку для cdma2000. Згідно з фіг. 17, базова станція (BS) передає на 1700 послідовність кадрів по прямому основному каналу (F-FCH ТХ) на мобільну станцію (MS). У показаному ілюстративному варіанті здійснення, підсегменти відповідають групам керування потужністю (PCG), шістнадцять (пронумеровані від 0 до 15) з яких утворюють кожний кадр. Після передачі всіх шістнадцяти PCG, що відповідають першому кадру, ТХ-кадр #0, BS починає передавати наступний кадр, ТХкадр #1. В ілюстративному варіанті здійснення, дані, що передаються, можуть оброблятися, як описано вище з посиланням на фіг. 16 і 16А. На стороні MS, MS приймає на 1710 передані PCG. Прийнявши останню PCG (тобто PCG #15) RX-кадру #0 відповідного ТХ-кадру #0, MS починає декодувати RX-кадр #0 з використанням всіх прийнятих PCG. Декодована інформація стає доступною після закінчення часу декодування TD. В ілюстративному варіанті здійснення, декодування може здійснюватися, як описано нижче з посиланням на фіг. 18. Відмітимо, що MS декодує ТХ-кадр #0, одночасно приймаючи PCG ТХ-кадру #1. На фіг. 18 показаний традиційний спосіб 1800 відновлення оцінних інформаційних бітів b' з прийнятих символів у. На етапі 1805, приймаються символи у або 1700а для повного кадру. На етапі 1810, символи у або 1700а демодулюються, розкладаються і деперемежовуються для вироблення символів у', також позначених як сигнал 1810а. Фахівцеві в даній галузі техніки очевидно, що операції, здійснювані на етапі 1810, можуть бути зворотними операціям, що здійснюються на передавачі, показаним, наприклад, на фіг. 16. На етапі 1820 символи у' декодуються і комбінуються з урахуванням інформації про швидкість R. В реалізації, швидкість R може вказувати, скільки бітів знаходиться в прийнятому кадрі, і може використовуватися, наприклад, декодером для визначення, в якій точці прийнятої символьної послідовності закінчити декодування і/або видалити кінцеві біти з декодованої послідовності. На етапі 1820, також можна видаляти кінцеві біти декодованої послідовності, наприклад, приєднані на етапі 1610, показаному на фіг. 16. Результатом етапу 1820 є вихідний сигнал 1820а. На етапі 1830, FQI, наприклад, приєднаний на етапі 1600, показаному на фіг. 16, перевіряється, і також може видалятися з інформаційних бітів. У реалізації, результат перевірки FQI може вказувати успішне або неуспішне декодування. На етапі 1830 генеруються відновлені інформаційні біти, позначені як Ь', спільно з результатом FQI, які можуть вказувати успіх або невдачу. На етапі 1840, спосіб може перейти до наступного кадру, і повторити вищеописані етапи для наступного кадру. Відповідно до даного винаходу, методи раннього декодування і закінчення кадру, описані нижче, можуть дозволяти системі зв'язку 100 загалом працювати ефективніше і економити потужність передачі, тим самим збільшуючи стільникову пропускну здатність. На фіг. 19 показаний ілюстративний варіант здійснення схеми для раннього закінчення передач прямої лінії зв'язку для систем, що працюють згідно зі стандартом cdma2000. Відмітимо, що ілюстративний варіант здійснення показаний виключно в ілюстративних цілях, і не має наміру обмежувати об'єм даного винаходу системами на основі cdma2000. Фахівцеві в даній галузі техніки також очевидно, що конкретні PCG і номери кадрів вказані тут виключно в ілюстративних цілях, і не мають наміру обмежувати об'єм даного винаходу. Згідно з фіг. 19, базова станція (BS) передає послідовність кадрів на 1900 на мобільну станцію (MS). В ілюстративному варіанті здійснення, передачі можуть здійснюватися на 11 UA 102398 C2 5 10 15 20 25 30 35 40 45 50 55 прямому основному каналі (F-FCH ТХ). Як описано вище, кожний підсегмент, показаний на фіг. 19, може відповідати групі керування потужністю (PCG) в cdma2000. BS починає передачу з PCG #0 ТХ-кадру #0, і безперервно передає PCG, поки не прийме сигнал АСК 1945 від MS після PCG #8. MS передає сигнал АСК, щоб сигналізувати BS, що MS успішно декодувала весь ТХкадр #0 на основі вже прийнятих PCG. Прийнявши АСК 1945, BS припиняє передачу PCG, відповідних ТХ-кадру #0 і чекає початку наступного кадру, ТХ-кадр #1, до передачі PCG для нового кадру ТХ-кадр #1. Відмітимо, що протягом кінцевого періоду часу, зв'язаного з прийомом і обробкою сигналу АСК 1945, BS може вже почати передачу PCG #9 ТХ-кадру #0. Позиції 1910-1940 демонструють хронування дій, що виробляються MS для генерації сигналу АСК 1945, що відправляється на BS, що дозволяє BS раніше закінчувати передачі ТХкадрів. У 1910, MS приймає PCG для ТХ-кадру #0 і ТХ-кадру #1 як RX-кадру #0 і RX-кадру #1 відповідно. У 1920, MS намагається декодувати RX-кадр #0 при прийомі кожної PCG RX-кадру #0, не чекаючи прийому всіх шістнадцяти PCG, виділених RX-кадру #0. В ілюстративному варіанті здійснення, для виконання такого декодування для кожної PCG, MS може використовувати алгоритм попідсегментного декодування, наприклад 2000, описаного нижче з посиланням на фіг. 20. У 1925, прийнявши PCG #7, MS успішно декодує RX-кадр #0, що визначається, наприклад, перевіркою CRC, зв'язаного з прийнятими бітами. MS оголошує успіх декодування і переходить до передачі АСК 1930. У 1930, оголосивши успіх декодування в 1925, MS передає сигнал АСК MS 1945 на BS протягом частини передачі, зв'язаної з PCG #8 зворотної лінії зв'язку. В ілюстративному варіанті здійснення, MS може просто передавати сигнал АСК протягом PCG , що безпосередньо слідує за, або в будь-якій PCG, що слідує за PCG, в якій визначений успіх декодування. У альтернативному ілюстративному варіанті здійснення, наприклад, показаному на фіг. 19, хронування передачі сигналу АСК 1945 може керуватися маскою АСК 1940. Маска АСК призначена для вказування, коли можна і коли не можна передавати сигнал АСК. Забезпечення такої маски АСК може обмежувати використовувану пропускну здатність лінії зв'язку за рахунок передачі повідомлень квітирування. Згідно з фіг. 19, маска АСК 1940 характеризується інтервалам часу, позначеним "1", протягом якого дозволена передача АСК по зворотній лінії зв'язку. Передачі АСК не дозволені протягом інтервалів часу, позначених "0". В ілюстративному варіанті здійснення, завдяки обмеженню передач АСК тільки інтервалами часу після порогових PCG, маска АСК може гарантувати, що спроби декодування робляться тільки після обробки достатньої частини прийнятого кадру. Згідно з даним винаходом, MS може передавати повідомлення АСК в наступний період часу, позначений як "1" маскою АСК, який безпосередньо слідує за успішним декодуванням. Відмітимо, що конкретні конфігурації маски АСК показані тут виключно в ілюстративних цілях, і не мають наміру обмежувати об'єм даного винаходу будь-якою показаною маскою АСК. Фахівцеві в даній галузі техніки очевидно, що можна легко забезпечити альтернативні конфігурації маски АСК, що дозволяють передачу АСК на протязі ділянок підсегментів або PCG, відмінних від показаних. Такі альтернативні ілюстративні варіанти здійснення розглядаються як такі, що знаходяться в об'ємі даного винаходу. В ілюстративному варіанті здійснення, PCG, вказані шаблоном маски АСК, можуть перекриватися з тими ж PCG, які призначені шаблоном для шаблону стробованого пілотсигналу RL, використовуваного для сигналізації передачі кадру NR, наприклад, раніше описаної тут з посиланням на фіг. 11. В ілюстративному варіанті здійснення, BS ТХ також може включати в себе пілотну передачу (не показана), яка може перемикатися від пілот-сигналу, що безперервно перемикається до стробованого пілот-сигналу після прийому MS АСК 1945, причому стробований пілот-сигнал передається згідно з шаблоном стробованого пілот-сигналу. На фіг. 20 показаний ілюстративний варіант здійснення схеми попідсегментного декодування згідно з даним винаходом. Відмітимо, що спосіб 2000 показаний виключно в ілюстративних цілях, і не має наміру обмежувати об'єм даного винаходу якими-небудь конкретними показаними ілюстративними варіантами здійснення. Згідно з фіг. 20, на етапі 2001, індекс n підсегмента ініціалізується значенням n=0. На етапі 2005, спосіб передбачає прийом символів yn для підсегмента n. 12 UA 102398 C2 5 10 15 20 25 30 35 40 45 50 55 60 На етапі 2010, спосіб передбачає демодулювання, розкладання і деперемежовування всіх символів уn, прийнятих до і під час підсегмента n поточного кадру. уn може включати в себе, наприклад, всі символи трафіка, прийняті від підсегмента 0 до підсегмента n, включно. Результат етапу 2010 позначається як у'n. На етапі 2020, спосіб передбачає декодування і комбінування символів у'n. Фахівцеві в даній галузі техніки очевидно, що, хоч символи у'n, загалом, відповідають тільки частині всіх символів х, виділених передавачем для повного кадру, проте, можна робити спробу "раннього" декодування повного кадру з використанням тільки символів у'n. Така спроба раннього декодування забезпечує хорошу можливість успішного декодування в силу, наприклад, надмірності в символах х, що вноситься за рахунок кодування і/або повторення з дробовою швидкістю, наприклад, на етапі 1620, показаному на фіг. 16, і/або рознесення в часі або в іншому вимірюванні, що досягається шляхом перемежовування на етапі 1630, показаному на фіг. 16. На етапі 2020, кодовані кінцеві біти можна додатково видаляти з декодованої бітової послідовності для генерації сигналу 2020а. На етапі 2030, спосіб передбачає перевірку FQI із сигналу 2020а і генерування результату FQI 2030а з накопичених прийнятих підсегментів для поточного кадру аж до n. На етапі 2035, спосіб передбачає оцінювання, чи вказує успіх результат FQI. Якщо так, спосіб переходить до етапу 2040, на якому декодування оголошується успішним, і спосіб переходить до генерації повідомлення АСК для забезпечення ранньогозакінчення передач прямої лінії зв'язку. Наступна доступна можливість може бути, наприклад, вказана маскою АСК, описаною з посиланням на фіг. 5. Якщо ні, спосіб переходить до етапу 2037. На етапі 2037, спосіб передбачає збільшення n і визначення, чи залишилися додаткові підсегменти в кадрі, що приймається. Якщо так, спосіб повертається до етапу 2005. Якщо ні, спосіб переходить до оголошення декодування кадру неуспішним на етапі 2060. На етапі 2070, декодер переходить до оцінювання наступного кадру. На фіг. 21 показана реалізація 2100 традиційного тракту обробки символів прямої лінії зв'язку для Radio Configuration 4 (RC4) згідно зі стандартом cdma2000, а також ілюстративний варіант здійснення 2110 тракту обробки символів прямої лінії зв'язку згідно з даним винаходом. У реалізації 2100, індикатор якості кадру включає в себе CRC довжиною 6, 6, 8 або 12, які приєднані до бітів кадру, залежно від символьної швидкості кадру. В ілюстративному варіанті здійснення 2110 згідно з даним винаходом, індикатор якості кадру включає в себе CRC збільшеної довжини 12, 12, 12, або 12, які приєднані до бітів кадру. Використання CRC збільшеної довжини підвищує продуктивність схем раннього декодування згідно з даним винаходом, що дозволяє, наприклад, точніше визначати успіх декодування для методів раннього декодування згідно з даним винаходом. Відмітимо, що проілюстровані тут конкретні довжини CRC забезпечені виключно в ілюстративних цілях, і не мають наміру обмежувати об'єм даного винаходу якими-небудь конкретними проілюстрованими довжинами CRC. Як додатково показано в реалізації 2100, показники перфорації символів становлять 1/5, 1/9, Ні і Ні, залежно від символьної швидкості кадру. В ілюстративному варіанті здійснення 2110 згідно з даним винаходом, показники перфорації символів становлять 1/3, 1/5, 1/25 і Ні, залежно від символьної швидкості кадру. Фахівцеві в даній галузі техніки очевидно, що підвищене перфорування в ілюстративному варіанті здійснення 2110 можна використовувати для розміщення CRC збільшених довжин, що викликаються згідно з ілюстративним варіантом здійснення 2110. На фіг. 22 показаний ілюстративний варіант здійснення схеми сигналізації 2200, використовуваної для сигналізації повідомлення АСК на зворотній лінії зв'язку для раннього закінчення передач прямої лінії зв'язку. Згідно з фіг. 22, зворотний канал АСК (R-ACKCH) 2210 модулюється з використанням амплітудної маніпуляції (ООК) кодом Уолша W(64, 16) 2212 з використанням модулятора 2214. Відносний коефіцієнт посилення каналу 2216 застосовується до результивного сигналу, і надходить на адитивний об'єднувач 2218. Згідно з фіг. 22, зворотний основний канал (R-FCH) 2220, що має швидкість 1536 символів за 20 мс, модулюється функцією Уолша W(16,4) 2222 з використанням модулятора 2224. Відносний коефіцієнт посилення каналу 2226 застосовується до результивного сигналу, і результат також надходить на адитивний об'єднувач 2218. Вихідний сигнал адитивного об'єднувача може забезпечуватися на квадратурному (Q) каналі 2228 для передачі зворотної лінії зв'язку на BS. У показаному ілюстративному варіанті здійснення, також забезпечений синфазний (І) канал 2234, який включає в себе зворотний пілот-канал (R-PICH) 2230. Відмітимо, що ілюстративний варіант здійснення схеми сигналізації АСК зворотної лінії зв'язку, показаної з посиланням на фіг. 22, наведений виключно в ілюстративних цілях і не має 13 UA 102398 C2 5 10 15 20 25 30 35 40 45 50 55 60 наміру обмежувати об'єм даного винаходу яким-небудь конкретним варіантом здійснення схеми сигналізації АСК. Фахівцеві в даній галузі техніки очевидно, що альтернативні методи сигналізації АСК на зворотній лінії зв'язку можна легко вивести в світлі даного винаходу, включаючи застосування різних форм модуляції і передачу повідомлення АСК по каналах, альтернативних показаним. Такі альтернативні ілюстративні варіанти здійснення розглядаються як такі, що знаходяться в об'ємі даного винаходу. На фіг. 23 показаний ілюстративний варіант здійснення схеми 2300 для раннього закінчення передач зворотної лінії зв'язку для систем, що працюють згідно зі стандартом cdma2000. Відмітимо, що ілюстративний варіант здійснення показаний виключно в ілюстративних цілях і не має наміру обмежувати об'єм даного винаходу якою-небудь конкретною показаною схемою раннього закінчення зворотної лінії зв'язку. Фахівцеві в даній галузі техніки очевидно, що конкретні PCG і номери кадрів вказані тут виключно в ілюстративних цілях. Згідно з фіг. 23, мобільна станція (MS) передає послідовність кадрів на 2300 на базову станцію (BS). В ілюстративному варіанті здійснення, кадри можуть передаватися по зворотному основному каналу (R-FCH ТХ). Згідно з фіг. 23, кожний показаний підсегмент відповідає групі керування потужністю (PCG). MS починає передачу ТХ-кадру #0 в PCG #0, і безперервно передає PCG, поки не надійде сигнал АСК 2345 від BS після PCG #8. Отримавши АСК 2345, MS припиняє передачу PCG, відповідних ТХ-кадру #0, і чекає початку наступного кадру, ТХ-кадр #1, щоб почати передачу PCG, відповідних ТХ-кадру #1. Позиції 2310-2340 ілюструють хронування дій, що робляться BS для генерування сигналу АСК 2345, що передається на MS, що дозволяє MS раніше закінчувати передачі кадрів зворотної лінії зв'язку. У 2310, BS приймає PCG ТХ-кадру #0 і ТХ-кадру #1 як RX-кадру #0 і RX-кадру#1 відповідно. У 2320, BS намагається декодувати RX-кадр #0 при прийомі кожної окремої PCG, не чекаючи прийому всіх шістнадцяти PCG, виділених RX-кадру #0. В ілюстративному варіанті здійснення, для виконання такого декодування для кожної PCG, BS може використовувати алгоритм попідсегментного декодування, наприклад 2000, описаний вище з посиланням на фіг. 20. У 2325, прийнявши PCG #5, BS оголошує успіх декодування і переходить до етапу 2330 передачі АСК для генерування сигналу BS АСК ТХ. У 2330, оголосивши успіх декодування на етапі 2325, BS передає сигнал АСК 2345 протягом частини передачі, зв'язаної з PCG #8 прямої лінії зв'язку. Частина передачі, протягом якої передається сигнал АСК 2345, може задаватися відповідною маскою АСК 2340. В ілюстративному варіанті здійснення, шаблон маски АСК може дозволяти передачу АСК тільки протягом тих PCG, в яких команда керування потужністю передається по прямій лінії зв'язку (FL) для керування потужністю передач зворотної лінії зв'язку (RL), що описано вище з посиланням на фіг. 19. Згідно з фіг. 23, 2350 додатково ілюструє передачу пілот-сигналу зворотної лінії зв'язку на MS згідно з ілюстративним варіантом здійснення схеми раннього закінчення зворотної лінії зв'язку. На етапі 2350, після того, як MS приймає сигнал АСК 2345 від BS в PCG #8, MS припиняє передавати пілот-сигнал RL в кожній PCG. Навпаки, як показано, передача пілотсигналу RL може блокуватися для вибраних PCG. Це дозволяє, як економити потужність передачі пілот-сигналу RL для інших PCG, так і забезпечувати додатковий механізм передачі АСК на BS. В ілюстративному варіанті здійснення, шаблон стробованого пілот-сигналу RL для інших PCG може відповідати шаблону, використовуваному для сигналізації передачі кадру NR, наприклад, раніше описаному тут з посиланням на фіг. 11. У показаному ілюстративному варіанті здійснення, пілот-сигнал RL придушується протягом PCG 9, 10, 13 і 14. У загальному випадку, пілот-сигнал RL може придушуватися в групах, що перемежовуються, з двох PCG після передачі сигналу АСК, до кінця заздалегідь закінченого кадру. Додатково відмітимо, що, при стробуванні пілот-сигналу для кадрів NR, можна використовувати різні схеми для стробованого пілот-сигналу заздалегідь закінчених кадрів, наприклад: одна група керування потужністю «увімкнення», після якої слідує одна група керування потужністю «вимкнення»; дві групи керування потужністю «увімкнення», після яких слідують дві групи керування потужністю «вимкнення»; і будь-які інші шаблони, що дозволяють знижувати потужність передачі. На фіг. 24 показана реалізація 2400 традиційного тракту обробки символів зворотної лінії зв'язку, а також ілюстративний варіант здійснення 2410 тракту обробки символів зворотної лінії зв'язку згідно з даним винаходом. У реалізації 2400, CRC довжиною 6, 6, 8 або 12 приєднуються до бітів кадру, залежно від символьної швидкості кадру. В ілюстративному варіанті здійснення 2410 згідно з даним винаходом, CRC збільшеної довжини 12, 12, 12 або 12 можна приєднувати 14 UA 102398 C2 5 10 15 20 25 30 35 40 45 50 55 60 до бітів кадру. Як і у разі обробки прямої лінії зв'язку, поданої на фіг. 21, використання CRC збільшеної довжини підвищує продуктивність схем раннього декодування згідно з даним винаходом, що дозволяє, наприклад, точніше визначати успіх декодування для методів раннього декодування. Відмітимо, що проілюстровані тут конкретні довжини CRC забезпечені виключно в ілюстративних цілях, і не мають наміру обмежувати об'єм даного винаходу якиминебудь конкретними проілюстрованими довжинами CRC. Як додатково показано в реалізації 2400, показники перфорації символів становлять 1/5, 1/9, Ні й Ні, залежно від символьної швидкості кадру. В ілюстративному варіанті здійснення 2410 згідно з даним винаходом, показники перфорації символів становлять 1/3, 1/5, 1/25 і Ні, залежно від символьної швидкості кадру. Фахівцеві в даній галузі техніки очевидно, що підвищене використання перфорування в ілюстративному варіанті здійснення 2410 дозволяє розміщувати CRC збільшених довжин, які також присутні в ілюстративному варіанті здійснення 2410. В ілюстративному варіанті здійснення, сигнал АСК, що передається BS на MS, можна забезпечувати шляхом заміщення (перфорації) біта, що має заздалегідь визначену позицію на каналі трафіка прямої лінії зв'язку, і/або з використанням амплітудної маніпуляції (ООК) в заздалегідь визначеній позиції для передачі АСК або NAK (негативного квітирування) на MS. В ілюстративному варіанті здійснення, заздалегідь визначена позиція може змінюватися від кадру до кадру згідно із заздалегідь визначеним псевдовипадковим бітовим шаблоном. В ілюстративному варіанті здійснення, біт АСК можна мультиплексувати за часом (TDM) з бітом керування потужністю зворотної лінії зв'язку. Відмітимо, що вищеописані аспекти раннього закінчення кадрів можуть застосовуватися не тільки до основного каналу лінії зв'язку cdma2000, але і до додаткового каналу з "високою швидкістю передачі даних". Наприклад, в альтернативному ілюстративному варіанті здійснення (не показаний), механізм сигналізації АСК по прямій лінії зв'язку можна використовувати, щоб одна або декілька MS могли здійснювати раннє закінчення передач на одному або декількох відповідних зворотних додаткових каналах. Наприклад, в ілюстративному варіанті здійснення (не показаний), одна або декілька MS можуть одночасно передавати кадри на відповідних зворотних додаткових каналах. Якщо BS успішно приймає кадр на зворотному додатковому каналі від MS, BS може передавати АСК по відповідному прямому загальному підканалу квітирування прямого загального каналу квітирування, причому один підканал кожного прямого загального каналу квітирування призначений для керування одним зворотним додатковим каналом. Таким чином, прямі загальні підканали квітирування від множинних MS можна мультиплексувати в єдиний прямий загальний канал квітирування. Наприклад, в ілюстративному варіанті здійснення, множинні підканали можна мультиплексувати за часом в єдиний загальний канал квітирування згідно із заздалегідь визначеним шаблоном, відомим BS і одній або декільком MS. Такий заздалегідь визначений шаблон можна вказувати за допомогою зовнішньої сигналізації (не показана). BS може підтримувати роботу на одному або декількох прямих загальних каналах квітирування. В ілюстративному варіанті здійснення, підсегменти або PCG, в яких може передаватися прямий загальний канал квітирування для зворотних додаткових каналів, можуть вказуватися маскою АСК, раніше описаною тут. У альтернативному ілюстративному варіанті здійснення, механізм сигналізації АСК на зворотній лінії зв'язку може бути забезпечений для керування передачами на прямому основному каналі і одному або декількох прямих додаткових каналах, для систем, що працюють згідно зі стандартом cdma2000. На фіг. 25 показаний ілюстративний варіант здійснення схеми сигналізації 2500, використовуваної для сигналізації повідомлення АСК на зворотній лінії зв'язку для раннього закінчення прямого основного каналу (F-FCH) і/або до двох прямих додаткових каналів (F-SCH1 і F-SCH2). Згідно з фіг. 25, зворотний канал АСК (R-ACKCH) 2520 модулюється з використанням двійкової фазової маніпуляції (BPSK) функцією Уолша W(64, 16) 2522 з використанням модулятора 2524. В ілюстративному варіанті здійснення, R-ACKCH 2520 може сигналізувати BS для закінчення передач на прямому основному каналі (F-FCH). Відносний коефіцієнт посилення каналу 2526 застосовується до результативного сигналу і надходить на адитивний об'єднувач 2518. Згідно з фіг. 25, другий зворотний канал АСК (R-ACKCH) 2510 модулюється з використанням двійкової фазової маніпуляції (BPSK) функцією Уолша W(16, 12) 2512 з використанням модулятора 2514. В ілюстративному варіанті здійснення, АСКСН 2510 може сигналізувати BS для закінчення передач на першому прямому додатковому каналі (F-SCH1). Відносний коефіцієнт посилення каналу 2516 застосовується до результативного сигналу і надходить на адитивний об'єднувач 2518. 15 UA 102398 C2 5 10 15 20 25 30 35 40 45 50 55 60 На фіг. 25 додатково показано, що обидва канали R-ACK можна комбінувати зі зворотним основним каналом (R-FCH) в квадратурний (Q) компонент сигналу RL. R-FCH може мати швидкість 1536 символів за 20 мс, і також модулюється функцією Уолша W(16, 4) 2532 з використанням модулятора 2534. Відносний коефіцієнт посилення каналу 2536 застосовується до результативного сигналу і надходить на адитивний об'єднувач 2518. Вихідний сигнал адитивного об'єднувача може забезпечуватися на квадратурному (Q) каналі 2528 для передачі зворотної лінії зв'язку на BS. На фіг. 25 додатково показано, що третій зворотний канал АСК (R-АСКСН) 2550 модулюється з використанням амплітудної маніпуляції (ООК) функцією Уолша W(16, 8) 2552 з використанням модулятора 2554. В ілюстративному варіанті здійснення, АСКСН 2550 може сигналізувати BS для закінчення передач на другому прямому додатковому каналі (F-SCH2). Відносний коефіцієнт посилення каналу 2556 застосовується до результативного сигналу і надходить на адитивний об'єднувач 2548. R-ACKCH 2550 можна комбінувати зі зворотним пілот-каналом (R-PICH) 2540 з використанням суматора 2548 для генерації синфазного (І) сигналу 2544 зворотної лінії зв'язку. Фахівцеві в даній галузі техніки очевидно, що вищеописані ілюстрації конкретних схем сигналізації АСК для прямої лінії зв'язку наведені виключно в ілюстративних цілях, і не мають наміру обмежувати об'єм даного винаходу якими-небудь конкретними схемами сигналізації АСК для прямого і зворотного каналів. На фіг. 26 показаний ілюстративний варіант здійснення способу 2600 згідно з даним винаходом. Відмітимо, що спосіб 2600 показаний виключно в ілюстративних цілях і не має наміру обмежувати об'єм даного винаходу яким-небудь конкретним способом. На етапі 2610 приймається мовний кадр. На етапі 2620, спосіб передбачає спроби раннього декодування прийнятого мовного кадру. В ілюстративному варіанті здійснення, спроби раннього декодування можна робити до прийому всіх підсегментів кадру. На етапі 2630, спосіб передбачає визначення, чи була успішною спроба декодування мовного кадру. В ілюстративному варіанті здійснення, індикатор якості кадру, наприклад CRC, можна перевіряти для визначення, чи було успішним декодування кадру. На етапі 2640, сигнал квітирування (АСК) передається для закінчення передачі мовного кадру. Методи раннього закінчення, що відповідають даному винаходу, можна легко застосовувати до випадків, коли мобільна станція здійснює "м'який хендовер", тобто, коли MS одночасно здійснює зв'язок з множинними BS по прямій і/або зворотній лінії зв'язку. Наприклад, коли MS здійснює м'який хендовер між двома BS, передачі зворотної лінії зв'язку від MS можуть прийматися на кожній з двох BS, будь-яка або обидві з яких можуть передавати сигнал АСК (не обов'язково одночасно) назад на MS для припинення передач MS. В ілюстративному варіанті здійснення, у відповідь на прийом більше ніж одного сигналу АСК в ході передачі кадрів зворотної лінії зв'язку, MS може припиняти передачу поточного кадру після прийому першого із сигналів АСК. Крім того, раннє закінчення можна одночасно застосовувати для керування передачами прямої лінії зв'язку від двох BS на MS. Наприклад, у відповідь на успішне раннє декодування кадру, одночасно прийнятого від двох BS, MS може передавати сигнал АСК для припинення передачі обома BS на прямій лінії зв'язку. Такі альтернативні ілюстративні варіанти здійснення розглядаються як такі, що знаходяться в об'ємі даного винаходу. Фахівцям в даній галузі техніки очевидно, що інформацію і сигнали можна представляти з використанням найрізноманітніших технологій і методів. Наприклад, дані, інструкції, команди, інформація, сигнали, біти, символи і чіпи, які можуть бути згадані у вищенаведеному описі винаходу, можуть бути представлені напруженнями, струмами, електромагнітними хвилями, магнітними полями або частинками, оптичними полями або частинками або будь-якою їх комбінацією. Фахівцям в даній галузі техніки очевидно, що різні ілюстративні логічні блоки, модулі, процесори, засоби, схеми і етапи алгоритмів, описані в зв'язку з розглянутими тут аспектами, можна реалізувати у вигляді електронного обладнання, комп'ютерного програмного забезпечення або їх комбінації. Щоб виразно проілюструвати цю взаємозамінність обладнання і програмного забезпечення, різні ілюстративні компоненти, блоки, модулі, схеми і етапи були описані вище, загалом, застосовано до їх функціональних можливостей. Чи реалізувати такі функціональні можливості у вигляді обладнання або програмного забезпечення, залежить від конкретного застосування і конструкційних обмежень, що накладаються на систему загалом. Фахівці в даній галузі можуть реалізувати описані функціональні можливості по-різному для 16 UA 102398 C2 5 10 15 20 25 30 35 40 45 50 55 кожного конкретного застосування, але такі рішення щодо реалізації не треба інтерпретувати як зв'язані з відходом від об'єму даного винаходу. Різні ілюстративні логічні блоки, модулі і схеми, описані в зв'язку з розглянутими тут аспектами, можна реалізувати в або здійснювати за допомогою процесора загального призначення, цифрового сигнального процесора (DSP), спеціалізованої інтегральної схеми (ASIC), програмованої користувачем вентильної матриці (FPGA) або іншого програмованого логічного пристрою, дискретної вентильної або транзисторної логіки, дискретних апаратних компонентів, або будь-якої їх комбінації, призначеної для здійснення описаних тут функцій. Процесор загального призначення може бути мікропроцесором, але, альтернативно, процесор може бути будь-яким традиційним процесором, контролером, мікроконтролером або кінцевим автоматом. Процесор також можна реалізувати як комбінацію обчислювальних пристроїв, наприклад, комбінацію DSP і мікропроцесора, сукупність мікропроцесорів, один або декілька мікропроцесорів спільно з ядром DSP, або будь-яку іншу придатну конфігурацію. Етапи способу або алгоритму, описані в зв'язку з розглянутими тут аспектами, можна реалізувати безпосередньо в обладнанні, в програмному модулі, виконуваному процесором, або в їх комбінації. Програмний модуль може розташовуватися в оперативній пам'яті (ОЗП), флеш-пам'яті, постійній пам'яті (ПЗП), електрично програмованому ПЗП (ЕППЗП), електрично стираному програмованому ПЗП (ЕСППЗП), регістрах, жорсткому диску, змінному диску, CDROM, або будь-якому іншому різновиді носія інформації, відомому в техніці. Ілюстративний носій інформації підключений до процесора, завдяки чому процесор може зчитувати інформацію з носія інформації і записувати інформацію на нього. Альтернативно, носій інформації може бути об'єднаний з процесором. Процесор і носій інформації можуть розташовуватися в ASIC. ASIC може розташовуватися на користувацькому терміналі. Альтернативно, процесор і носій інформації можуть розташовуватися у вигляді дискретних компонентів на користувацькому терміналі. В одному або декількох ілюстративних варіантах здійснення, описані функції можна реалізувати в обладнанні, програмному забезпеченні, програмно-апаратному забезпеченні або будь-якій їх комбінації. У разі програмної реалізації, функції можуть зберігатися або передаватися як одна або декілька інструкцій або код на комп'ютерозчитуваному носії. Комп'ютерозчитувані носії включають в себе комп'ютерні носії інформації і середовища зв'язку, що включають в себе будь-яке середовище, яке полегшує перенесення комп'ютерної програми з одного місця в інше. Носій інформації може являти собою будь-який доступний носій, до якого комп'ютер може здійснювати доступ. Як приклад, але не обмеження, такі комп'ютерозчитувані носії можуть містити ОЗП, ПЗП, ЕСППЗП, CD-ROM або інший запам'ятовуючий пристрій на основі оптичного диска, запам'ятовуючий пристрій на основі магнітного диску або інші магнітні запам'ятовуючі пристрої, або будь-який інший носій, який можна використовувати для перенесення і зберігання потрібного програмного коду у вигляді інструкцій або структур даних, і до якого комп'ютер може здійснювати доступ. Крім того, будь-яке з'єднання можна називати комп'ютерозчитуваним носієм. Наприклад, якщо програмне забезпечення передається з вебсайту, сервера або з іншого віддаленого джерела з використанням коаксіального кабелю, оптоволоконного кабелю, "витої пари", цифрової абонентської лінії (DSL) або бездротових технологій, наприклад, інфрачервоної, радіо і НВЧ, то коаксіальний кабель, оптоволоконний кабель, "вита пара", DSL, або бездротові технології, наприклад, інфрачервона, радіо і НВЧ включаються у визначення носія. Використовуване тут поняття диск включає в себе компактдиск (CD), лазерний диск, оптичний диск, цифровий універсальний диск (DVD), флопі-диск і диск blu-ray, де диски звичайно відтворюють дані магнітними засобами, тоді як диски звичайно відтворюють дані оптичними засобами за допомогою лазерів. Комбінації вищепереліченого також підлягають включенню в об'єм комп'ютерозчитуваних носіїв. Попередній опис розкритих ілюстративних варіантів здійснення дозволяє фахівцеві в даній галузі техніки робити або використовувати даний винахід. Фахівець в даній галузі техніки може запропонувати різні модифікації ілюстративних варіантів здійснення, і встановлені тут загальні принципи можуть застосовуватися до інших ілюстративних варіантів здійснення без відходу від суті і об'єму винаходу. Таким чином, даний винахід не підлягає обмеженню представленими тут ілюстративними варіантами здійснення, але підлягає розгляду відповідно до найширшого об'єму, узгоджуваного з розкритими тут принципами і ознаками новизни. 17 UA 102398 C2 ФОРМУЛА ВИНАХОДУ 5 10 15 20 25 30 35 40 45 50 55 1. Спосіб зв'язку з використанням шаблона стробованого пілот-сигналу, який включає етапи, на яких: приймають RX-кадр, форматований в першу сукупність підсегментів, обробляють RX-кадр як кадр нульової швидкості, якщо прийнятий пілот-сигнал, асоційований з RX-кадром, був переданий згідно з шаблоном стробованого пілот-сигналу, обробляють команди керування потужністю, прийняті в одному або більше з підсегментів першої сукупності, асоційованих з RX-кадром, які були призначені для передачі згідно з шаблоном стробованого пілот-сигналу, регулюють потужність передачі одного або більше з підсегментів ТХ-кадру, форматованого у другу сукупність підсегментів після обробки прийнятих команд керування потужністю, причому потужність передачі регулюється згідно з обробленими командами керування потужністю, при цьому, якщо ТХ-кадр є кадром нульової швидкості, регулювання потужності передачі одного або більше з підсегментів ТХ-кадру додатково містить: ігнорування однієї або більше з оброблених команд керування потужністю згідно з першою попередньо визначеною послідовністю; і вибір одного або більше з підсегментів ТХ-кадру для асоціювання з відрегульованою потужністю передачі згідно з другою попередньо визначеною послідовністю; і передачу другої сукупності підсегментів, асоційованих з ТХ-кадром, згідно з відрегульованою потужністю передачі. 2. Спосіб за п. 1, в якому RX-кадр приймають на базовій станції по зворотній лінії зв'язку системи бездротового зв'язку cdma2000 або на мобільній станції по прямій лінії зв'язку системи бездротового зв'язку cdma2000, і другу сукупність підсегментів, асоційованих з ТХ-кадром, передають від базової станції по прямій лінії зв'язку системи бездротового зв'язку cdma2000 або від мобільної станції по зворотній лінії зв'язку системи бездротового зв'язку cdma2000. 3. Спосіб за п. 1, в якому шаблон стробованого пілот-сигналу передбачає передачу і непередачу протягом групи двох або більше послідовних підсегментів RX-кадру. 4. Спосіб за п. 1, в якому шаблон стробованого пілот-сигналу передбачає перемежовування між передачею і непередачею в кожному другому підсегменті RX-кадру. 5. Спосіб зв'язку з використанням шаблона стробованого пілот-сигналу, який включає етапи, на яких: приймають RX-кадр, форматований в першу сукупність підсегментів, приймають команди керування потужністю в кожному другому з підсегментів першої сукупності RX-кадру; обробляють прийняті команди керування потужністю; регулюють потужність передачі одного або більше з підсегментів ТХ-кадру, форматованого у другу сукупність підсегментів після обробки прийнятих команд керування потужністю, причому потужність передачі регулюється згідно з обробленими командами керування потужністю, причому регулювання потужності передачі одного або більше з підсегментів ТХ-кадру додатково містить, якщо ТХ-кадр є кадром нульової швидкості: ігнорування кожної другої з оброблених команд керування потужністю; і регулювання потужності передачі кожного четвертого підсегмента другої сукупності підсегментів, асоційованих з ТХ-кадром; і передачу ТХ-кадру згідно з відрегульованою потужністю передачі, причому передача містить передачу пілот-сигналу згідно з шаблоном стробованого пілот-сигналу, якщо ТХ-кадр є кадром нульової швидкості, шаблон стробованого пілот-сигналу передбачений для передачі і непередачі протягом перемежовуваних груп двох або більше послідовних підсегментів ТХкадру. 6. Спосіб за п. 5, в якому RX-кадр приймають на базовій станції по зворотній лінії зв'язку системи бездротового зв'язку cdma2000 або на мобільній станції по прямій лінії зв'язку системи бездротового зв'язку cdma2000, і ТХ-кадр передають від базової станції по прямій лінії зв'язку системи бездротового зв'язку cdma2000 або від мобільної станції по зворотній лінії зв'язку системи бездротового зв'язку cdma2000. 7. Пристрій для зв'язку з використанням шаблона стробованого пілот-сигналу, який містить: 18 UA 102398 C2 5 10 15 20 25 30 35 40 45 50 55 60 приймач, сконфігурований для прийому RX-кадру, форматованого в першу сукупність підсегментів, процесор, сконфігурований для обробки RX-кадру як кадру нульової швидкості, якщо прийнятий пілот-сигнал, асоційований з RX-кадром, був переданий згідно з шаблоном стробованого пілотсигналу, для обробки команд керування потужністю, прийнятих в одному або більше з підсегментів першої сукупності, асоційованих з RX-кадром, які були призначені для передачі згідно з шаблоном стробованого пілот-сигналу, і для регулювання потужності передачі одного або більше з підсегментів ТХ-кадру, форматованого у другу сукупність підсегментів згідно з обробленими командами керування після обробки прийнятих команд керування потужністю, причому, якщо ТХ-кадр є кадром нульової швидкості, процесор додатково сконфігурований для ігнорування однієї або більше з оброблених команд керування потужністю згідно з першою попередньо визначеною послідовністю і для вибору одного або більше з підсегментів ТХ-кадру для асоціювання з відрегульованою потужністю передачі згідно з другою попередньо визначеною послідовністю; і передавач, сконфігурований для передачі другої сукупності підсегментів, асоційованих з ТХкадром, згідно з відрегульованою потужністю передачі. 8. Пристрій за п. 7, в якому пристрій містить базову станцію або мобільну станцію для системи бездротового зв'язку cdma2000. 9. Пристрій за п. 7, в якому шаблон стробованого пілот-сигналу передбачає передачу і непередачу протягом перемежовуваних груп двох або більше послідовних підсегментів RXкадру. 10. Пристрій за п. 7, в якому шаблон стробованого пілот-сигналу передбачає перемежовування між передачею і непередачею в кожному другому підсегменті RX-кадру. 11. Пристрій для зв'язку з використанням шаблона стробованого пілот-сигналу, який містить: приймач, сконфігурований для прийому RX-кадру, форматованого в першу сукупність підсегментів, і команд керування потужністю в кожному другому з підсегментів першої сукупності RX-кадру; процесор, сконфігурований для обробки команд керування потужністю, прийнятих в кожному другому з підсегментів першої сукупності RX-кадру, і для регулювання потужності передачі одного або більше з підсигментів ТХ-кадру, форматованого у другу сукупність підсегментів згідно з обробленими командами керування потужністю після обробки прийнятих команд керування потужністю, причому, якщо ТХ-кадр є кадром нульової швидкості, процесор додатково сконфігурований для регулювання потужності передачі одного або більше з підсегментів ТХ-кадру за допомогою ігнорування кожної другої з оброблених команд керування потужністю і регулювання потужності передачі кожного четвертого підсегмента другої сукупності підсегментів, асоційованих з ТХ-кадром;і передавач, сконфігурований для передачі ТХ-кадру згідно з відрегульованою потужністю передачі і передачі пілот-сигналу згідно з шаблоном стробованого пілот-сигналу, якщо ТХ-кадр є кадром нульової швидкості, причому шаблон стробованого пілот-сигналу передбачений для передачі і непередачі протягом перемежовуваних груп двох або більше послідовних підсегментів ТХ-кадру. 12. Пристрій за п. 11, який містить базову станцію або мобільну станцію для системи бездротового зв'язку cdma2000. 13. Пристрій для зв'язку з використанням шаблона стробованого пілот-сигналу, який містить: засіб для прийому RX-кадру, форматованого в першу сукупність підсегментів, засіб для прийому команд керування потужністю в кожному другому з підсегментів першої сукупності RX-кадру; засіб для обробки прийнятих команд керування потужністю; засіб для регулювання потужності передачі одного або більше з підсегментів ТХ-кадру, форматованого у другу сукупність підсегментів згідно з обробленими командами керування потужністю після обробки прийнятих команд керування потужністю в засобі для обробки прийнятих команд керування потужністю, причому, якщо ТХ-кадр є кадром нульової швидкості, засіб для регулювання потужності передачі одного або більше з підсегментів ТХ-кадру додатково містить: засіб для ігнорування кожної другої з оброблених команд керування потужністю; і засіб для регулювання потужності передачі кожного четвертого підсегмента другої сукупності підсегментів, асоційованих з ТХ-кадром; і засіб для передачі ТХ-кадру згідно з відрегульованою потужністю передачі, причому згаданий засіб для передачі додатково містить засіб для передачі пілот-сигналу згідно з шаблоном стробованого пілот-сигналу, якщо ТХ-кадр є кадром нульової швидкості, причому шаблон 19 UA 102398 C2 5 10 15 20 25 30 35 40 45 50 55 60 стробованого пілот-сигналу передбачений для передачі і непередачі протягом перемежовуваних груп двох або більше послідовних підсегментів ТХ-кадру. 14. Пристрій для керування потужністю передачі, який містить: засіб для прийому RX-кадру, форматованого в першу сукупність підсегментів, засіб для обробки RX-кадру як кадру нульової швидкості, якщо прийнятий пілот-сигнал, асоційований з RX-кадром, був переданий згідно з шаблоном стробованого пілот-сигналу; засіб для обробки команд керування потужністю, прийнятих в одному або більше з підсегментів першої сукупності, асоційованих з RX-кадром, які були призначені для передачі згідно з шаблоном стробованого пілот-сигналу, засіб для регулювання потужності передачі одного або більше з підсегментів ТХ-кадру, форматованого у другу сукупність підсегментів згідно з обробленими командами керування потужністю після обробки прийнятих команд керування потужністю засобом для обробки прийнятих команд керування потужністю, причому, якщо ТХ-кадр є кадром нульової швидкості, засіб для регулювання потужності передачі одного або більше з підсегментів ТХ-кадру додатково містить: засіб для ігнорування однієї або більше оброблених команд згідно з першою попередньо визначеною послідовністю; і засіб для вибору одного або більше з підсигментів ТХ-кадру для асоціювання з відрегульованою потужністю передачі згідно з другою попередньо визначеною послідовністю; і засіб для передачі другої сукупності підсегментів, асоційованих з ТХ-кадром, згідно з відрегульованою потужністю передачі. 15. Комп'ютерочитаний носій інформації, який зберігає інструкції, які приписують комп'ютеру керувати потужністю передачі, причому носій додатково зберігає інструкції, які приписують комп'ютеру: приймати RX-кадр, форматований в першу сукупність підсегментів, обробляти RX-кадр як кадр нульової швидкості, якщо прийнятий пілот-сигнал, асоційований з RX-кадром, був переданий згідно з шаблоном стробованого пілота-сигналу; обробляти команди керування потужністю, прийняті в одному або більше з підсегментів першої сукупності, асоційованих з RX-кадром, які були призначені для передачі згідно з шаблоном стробованого пілот-сигналу, регулювати потужність передачі одного або більше з підсигментів ТХ-кадру, форматованого у другу сукупність підсегментів після обробки прийнятих команд керування потужністю, причому потужність передачі регулюється згідно з обробленими командами керування потужністю, при цьому, якщо ТХ-кадр є кадром нульової швидкості, інструкція, яка приписує комп'ютеру регулювати потужність передачі одного або більше з підсегментів ТХ-кадру, додатково містить інструкції, які приписують комп'ютеру: ігнорувати одну або більше з оброблених команд керування потужністю згідно з першою попередньо визначеною послідовністю; і вибирати один або більше з підсегментів ТХ-кадру для асоціювання з відрегульованою потужністю передачі згідно з другою попередньо визначеною послідовністю; і передавати другу сукупність під сегментів, асоційованих з ТХ-кадром, згідно з відрегульованою потужністю передачі. 16. Комп'ютерочитаний носій інформації, який зберігає інструкції, які приписують комп'ютеру керувати потужністю передачі, причому носій додатково зберігає інструкції, які приписують комп'ютеру: приймати RX-кадр, форматований в першу сукупність під сегментів; приймати команди керування потужністю в кожному другому з підсегментів першої сукупності RX-кадру; обробляти прийняті команди керування потужністю; регулювати потужність передачі одного або більше з підсегментів ТХ-кадру, форматованого у другу сукупність підсегментів після обробки прийнятих команд керування потужністю, причому потужність передачі регулюється згідно з обробленими командами керування потужністю, при цьому, якщо ТХ-кадр є кадром нульової швидкості, інструкція, яка приписує комп'ютеру регулювати потужність передачі одного або більше з підсегментів ТХ-кадру, додатково містить інструкції, які приписують комп'ютеру: ігнорувати кожну другу з оброблених команд керування потужністю; і регулювати потужність передачі кожного четвертого підсегмента другої сукупності підсегментів, асоційованих з ТХ-кадром; і передавати ТХ-кадр згідно з відрегульованою потужністю передачі, причому, якщо ТХ-кадр є кадром нульової швидкості, інструкція, яка приписує комп'ютеру передавати ТХ-кадр, додатково 20 UA 102398 C2 містить інструкції, які приписують комп'ютеру передавати пілот-сигнал згідно з шаблоном стробованого пілот-сигналу, який передбачений для передачі і непередачі протягом перемежовуваних груп двох або більше послідовних підсегментів ТХ-кадру. 21 UA 102398 C2 22 UA 102398 C2 23 UA 102398 C2 24 UA 102398 C2 25 UA 102398 C2 26 UA 102398 C2 27 UA 102398 C2 28
ДивитисяДодаткова інформація
Назва патенту англійськоюIncreasing capacity in wireless communication
Автори англійськоюJou, Yu-Cheun, Black, Peter, J., Attar, Rashid Ahmed, Akbar
Назва патенту російськоюПовышение пропускной способности беспроводной связи
Автори російськоюЦзоу Юй-Чеунь, Блек Питер Дж., Аттар Рашид Ахмед Акбар
МПК / Мітки
МПК: H04L 1/00
Мітки: зв'язку, пропускної, підвищення, бездротового, здатності
Код посилання
<a href="https://ua.patents.su/36-102398-pidvishhennya-propuskno-zdatnosti-bezdrotovogo-zvyazku.html" target="_blank" rel="follow" title="База патентів України">Підвищення пропускної здатності бездротового зв’язку</a>
Спосіб підвищення пропускної здатності каналу зв’язку на базі послідовного інтерфейсу та пристрій для його реалізації
Номер патенту: 25498
Опубліковано: 30.10.1998
Автори: Тимчишин Володимир Олександрович, Кочан Володимир Володимирович
МПК: G06F 11/26, G06F 11/00
Мітки: інтерфейсу, спосіб, пристрій, зв'язку, підвищення, реалізації, базі, каналу, пропускної, здатності, послідовного
Формула / Реферат:
1. Спосіб підвищення пропускної здатності каналу зв'язку на базі послідовного інтерфейсу за рахунок аналізу під час передачі кадру комп'ютером-передавачем наявності (відсутності) у лінії прийому квитуючого байта від комп'ютера-приймача і примусового припинення передачі решти кадру при відсутності прийому або виявленні помилки комп'ютером - приймачем, який відрізняється тим, що комп'ютер-передавач аналізує наявність (відсутність) стартового...
Спосіб підвищення пропускної спроможності та ефективності споживання енергії у системах бездротового зв’язку
Номер патенту: 92143
Опубліковано: 11.10.2010
Автори: Хабета Йорг, Дель Прадо Павон Хав'єр
МПК: H04L 12/56
Мітки: спосіб, підвищення, системах, зв'язку, пропускної, ефективності, енергії, споживання, бездротового, спроможності
Формула / Реферат:
1. Спосіб здійснення бездротового зв'язку, що передбачає:передавання кожним з множини пристроїв інформаційного елемента (400, 404) з інформацією, що стосується доступності (АІЕ), причому кожний такий інформаційний елемент повідомляє про доступність відповідного пристрою під час одного або декількох наступних інтервалів часу для передавання; а також планування передавання і приймання трафіка між згаданою множиною пристроїв...
Збільшення пропускної здатності в бездротовому зв’язку
Номер патенту: 100566
Опубліковано: 10.01.2013
Автори: Аттар Рашид Ахмед Акбар, Блек Пітер Дж., Цзоу Юй-Чеунь
МПК: H04L 1/00
Мітки: здатності, бездротовому, пропускної, збільшення, зв'язку
Формула / Реферат:
1. Спосіб обробки інформації відповідно до множини швидкостей, причому згаданий спосіб включає етапи, на яких:приймають поточний кадр, що містить інформацію трафіку;визначають, чи належить згаданий поточний кадр до критичного типу кадру;якщо поточний кадр визначається як такий, що належить до критичного типу кадру, обробляють інформацію трафіку для передачі;якщо поточний кадр визначається як такий, що не належить...
Збільшення пропускної здатності в бездротовому зв’язку
Номер патенту: 99660
Опубліковано: 10.09.2012
Автори: Цзоу Юй-Чеунь, Аттар Рашид Ахмед Акбар, Блек Пітер Дж.
Мітки: здатності, збільшення, пропускної, зв'язку, бездротовому
Формула / Реферат:
1. Спосіб дострокового припинення послідовних передач кадрів по каналу зв'язку, який включає етапи, на яких:безперервно передають перший кадр до приймача, причому кожний кадр розмічений на множину послідовних підсегментів;приймають повідомлення з підтвердженням від приймача під час передачі першого кадру; іприпиняють передачу непереданої частини множини послідовних підсегментів першого кадру після прийому повідомлення з...
Спосіб (варіанти) поліпшення пропускної здатності в системі, що містить в собі постійні присвоєння
Номер патенту: 97378
Опубліковано: 10.02.2012
Автор: Горохов Алєксєй
МПК: H04W 74/00
Мітки: здатності, спосіб, варіанти, містить, пропускної, собі, системі, постійні, присвоєння, поліпшення
Формула / Реферат:
1. Спосіб призначення ресурсів в системі зв'язку колективного доступу, який містить етапи, на яких:визначають, які з множини ресурсів, підпорядкованих умовному призначенню, підлягають використанню щонайменше одним умовним користувачем, причому множина ресурсів являє собою ресурси низхідної лінії зв'язку (DL);формують сигнал, який забезпечує вказування на один або більше умовних ресурсів з множини ресурсів, які підлягають...
Попередній патент: Похідні індолу як активатори nurr-1 та їх застосування для лікування хвороби паркінсона
Наступний патент: Деформівна пачка для курильних виробів та спосіб зменшення її розмірів
Випадковий патент: Фруктовий десерт