Пристрій для автоматичного управління висотою польоту


Формула / Реферат
Пристрій для автоматичного управління висотою польоту, що містить задатчик заданої висоти, датчик поточної висоти, блок їх порівняння, і блок формування керуючого впливу, який відрізняється тим, що в контур формування керуючого впливу додатково введено блок обмеження значення відхилення поточної висоти від заданої.
Текст
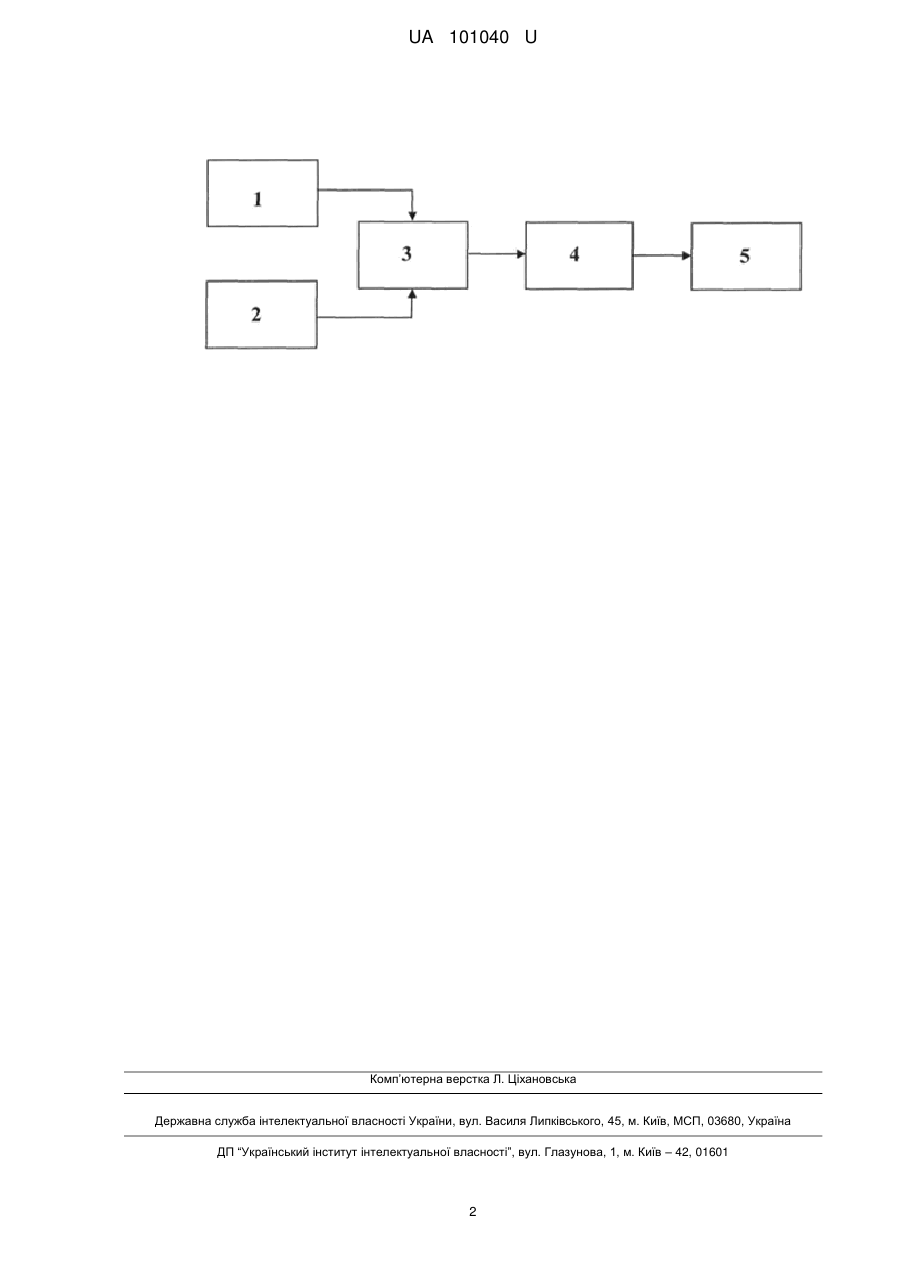
Реферат: UA 101040 U UA 101040 U 5 10 15 20 25 Корисна модель належить до авіації, зокрема до пристроїв автоматичного управління рухом повітряних суден. Відомі пристрої для управління висотою польоту, що містять вимірювач поточної висоти польоту, задатчик заданої висоти польоту, і блок обчислення потрібного керуючого відхилення руля висоти за відхиленням поточної висоти від заданої. їх недоліком є спеціалізація на задачах стабілізації заданої висоти, чи зміни висоти у малих межах режиму стабілізації - порядку десятків метрів, (див. Ю.П. Гуськов, Г.И. Загайнов Управление полетом самолетов. -М.: Машиностроение, 1991, - 268 с.). Задачею корисної моделі є створення пристрою для автоматичного управління висотою польоту, вільного від цього недоліку, і такого, що забезпечує стабілізацію заданої висоти і управління нею в усьому діапазоні висот літального апарату. Поставлена задача вирішується тим, що пристрій для автоматичного управління висотою польоту містить задатчик заданої висоти, датчик поточної висоти, блок їх порівняння, блок формування керуючого впливу, згідно з корисною моделлю, у контур формування керуючого впливу додатково введено блок обмеження значення відхилення поточної висоти від заданої, оскільки саме малі відхилення властиві режимам стабілізації. Таким чином, уздовж всього режиму управління висотою пристрій працює в режимі стабілізації. На кресленні наведено функціональну схему пристрою для автоматичного управління висотою польоту. Пристрій містить задатчик заданої висоти польоту (1), вимірювач поточної висоти польоту (2), блок порівняння заданої і поточної висоти польоту (3), блок обмеження значення відхилення поточної висоти від заданої (4), і блок обчислення керуючого впливу (5). Пристрій функціонує наступним чином. Задатчик заданої висоти польоту (1) обчислює задане значення висоти Hçàä . Вимірювач поточної висоти польоту (2) на виході має її значення H . Величини H і Hçàä подаються на блок порівняння (3). На його виході формується різниця H H Hçàä . Ця різниця подається на блок обмеження її значення (4). Блок (4) працює за 30 наступним правилом: якщо H Hiàêñ , то H Hiàêñ ; якщо H Hiàêñ , то значення H не обмежується. На блок формування керуючого впливу (5) поступає значення H , що за абсолютною величиною не є більшим, ніж його задане обмеження Hiàêñ . Блок (5) працює за правилами - задане обчислене K H K H ; K K , де çàä H H ˆ a çàä z z çàä прирощення кута тангажа відносно балансировочного значення, K H і K - задані числові H коефіцієнти, H - швидкість зміни висоти польоту, a - прирощення відхилення руля висоти ˆ відносно балансировочного значення. Прирощення çàä додатково обмежується із умови зриву потоку. Прирощення a також додатково обмежується із конструктивних обмежень ˆ 35 40 відхилень руля висоти. Введення додаткового блока дозволяє вирішувати задачу управління висотою за схемою задачі її стабілізації. Це спрощує пристрій і сприяє підвищенню його надійності. Імітаційне моделювання підтверджує працездатність пристрою. Пристрій не має обмежень по використанню за типами літальних апаратів, і може використовуватись у системах управління безпілотними апаратами, зокрема мікроапаратами. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 45 Пристрій для автоматичного управління висотою польоту, що містить задатчик заданої висоти, датчик поточної висоти, блок їх порівняння, і блок формування керуючого впливу, який відрізняється тим, що в контур формування керуючого впливу додатково введено блок обмеження значення відхилення поточної висоти від заданої. 1 UA 101040 U Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G08G 5/00
Мітки: пристрій, автоматичного, управління, польоту, висотою
Код посилання
<a href="https://ua.patents.su/4-101040-pristrijj-dlya-avtomatichnogo-upravlinnya-visotoyu-polotu.html" target="_blank" rel="follow" title="База патентів України">Пристрій для автоматичного управління висотою польоту</a>
Літальний апарат з системою автоматичного управління за висотою
Номер патенту: 39261
Опубліковано: 15.06.2001
Автори: Стрелков Ігор Васильович, Сметанкін Олександр Володимирович, Макаров Олександр Олександрович, Соловей Віктор Васильйович
МПК: G05D 1/00
Мітки: літальний, апарат, управління, висотою, автоматичного, системою
Формула / Реферат:
Літальний апарат з системою автоматичного управління за висотою, який відрізняється тим, що він має пристрій, що містить герметичний сильфон, який наповнений речовиною з високим коефіцієнтом температурного розширення, демпфер і пружину, які паралельно та жорстко з'єднані між собою, та встановлений в горизонтальному оперенні уздовж хорди стабілізатора, яка проходить крізь центр тиску стабілізатора, кінематично пов'язаного з останнім та з...
Спосіб інтегрованого керування висотою польоту повітряного судна зі складною аеродинамічною схемою крила
Номер патенту: 106521
Опубліковано: 10.09.2014
Автори: Павлов Вадим Володимирович, Копитова Катерина Анатоліївна
МПК: G05D 1/04, B64C 3/38, B64C 13/16
Мітки: аеродинамічною, інтегрованого, крила, схемою, спосіб, керування, висотою, польоту, складною, повітряного, судна
Формула / Реферат:
Спосіб інтегрованого керування висотою польоту повітряного судна зі складною аеродинамічною схемою крила, що передбачає розрахунок сигналу керування для кожного керованого рухомого елемента конструкції крила, який подають на виконуючий механізм згаданого керованого рухомого елемента, в якому, крім того виконують перевірку умов активації з передачею сигналу керування на виконавчий механізм керованого рухомого елемента, який відрізняється тим,...
Спосіб інтегрованого керування висотою польоту повітряного судна зі складною аеродинамічною схемою крила
Номер патенту: 79031
Опубліковано: 10.04.2013
Автори: Павлов Вадим Володимирович, Копитова Катерина Анатоліївна
МПК: B64C 13/16
Мітки: висотою, аеродинамічною, схемою, польоту, складною, спосіб, повітряного, керування, судна, інтегрованого, крила
Формула / Реферат:
Спосіб інтегрованого керування висотою польоту повітряного судна зі складною аеродинамічною схемою крила, що передбачає визначення вертикальної складової за відхиленням повітряного судна, розрахунок сигналу керування щонайменше для одного керованого рухомого елемента конструкції крила, який передають щонайменше на один виконуючий механізм згаданого керованого рухомого елемента, в якому, крім того, в ході польоту автоматичним способом...
Спосіб автоматичного управління мікрокліматом в приміщенні
Номер патенту: 72565
Опубліковано: 27.08.2012
Автори: Мазур Олександр Васильович, Гараган Николай Юрьевич
МПК: G05D 27/00, F24F 5/00
Мітки: автоматичного, мікрокліматом, управління, приміщенні, спосіб
Формула / Реферат:
Спосіб автоматичного управління мікрокліматом в приміщенні, що включає вимірювання і регулювання температури в приміщенні шляхом зміни витрат теплоносія у секцію нагріву кондиціонера пропорційно сумі значень відхилення поточної температури в приміщенні від заданої, її інтеграла і диференціала, вимірювання і регулювання відносної вологості в приміщенні шляхом зміни витрат подачі зволожуючої рідини у секцію зволоження кондиціонера пропорційно...
Пристрій автоматичного управління заглибним насосом
Номер патенту: 73049
Опубліковано: 10.09.2012
Автори: Ашкалунін Володимир Леонідович, Кац Олександр Борисович, Дубинкин Віктор Трохимович, Резніков Станіслав Юрійович, Піменов Генадій Олександрович
МПК: H02H 5/08
Мітки: управління, автоматичного, пристрій, насосом, заглибним
Формула / Реферат:
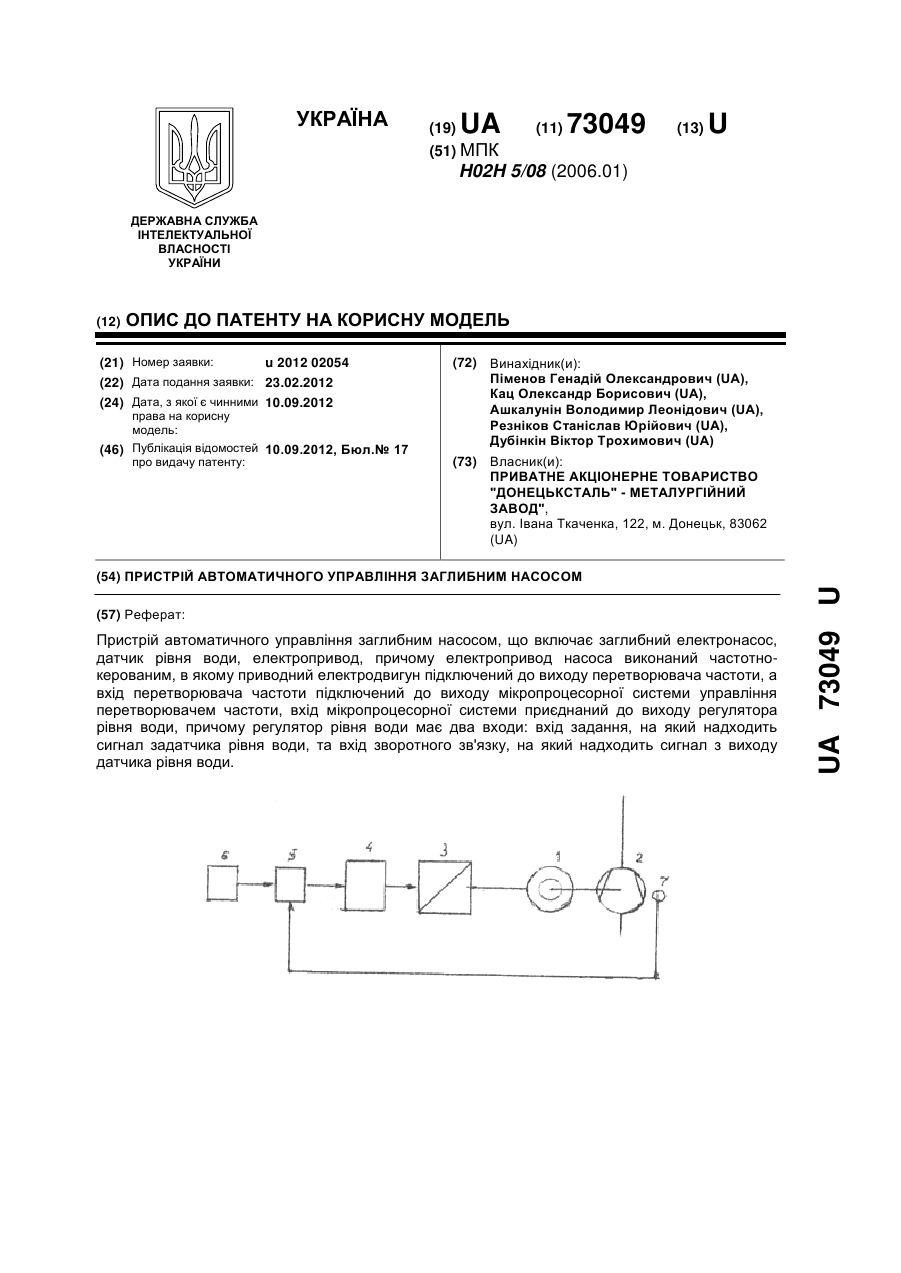
1. Пристрій автоматичного управління заглибним насосом, що включає заглибний електронасос, датчик рівня води, електропривод, який відрізняється тим, що електропривод насоса виконаний частотно-керованим, в якому приводний електродвигун підключений до виходу перетворювача частоти, а вхід перетворювача частоти підключений до виходу мікропроцесорної системи управління перетворювачем частоти, вхід мікропроцесорної системи приєднаний до виходу...
Попередній патент: Безпілотний літальний апарат
Наступний патент: Сонячно-електричний параплан
Випадковий патент: Распатор косаківської-семенова