Спосіб проектування швидкодіючих систем керування гідравлічними пресами

Формула / Реферат
Спосіб проектування швидкодіючих систем керування гідравлічними пресами, що полягає у визначенні відповідних параметрів гідравлічної системи в залежності від заданого коефіцієнта якості гідросистеми a, на базі якого проектують систему керування гідравлічним пресом, виготовляють в металі, здійснюють її монтаж та випробування, який відрізняється тим, що зменшують приведені до рухомої поперечини маси на ділянці гідроприводу "напірний клапан робочих циліндрів-робочий циліндр" до величини, достатньої для усунення інерційного вибігу при знеміцненні металу поковки при закритті напірного клапана наприкінці робочого ходу в залежності від властивостей поковки, що обробляється.
Текст
Реферат: UA 107951 U UA 107951 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до галузі машинобудування, а саме до гідроапаратури, і може знайти застосування при створенні систем керування машинами і механізмами з гідроприводом, у тому числі ковальсько-штампувальним обладнанням з гідравлічним приводом. Відомий спосіб визначення величини знеміцнення металу при високотемпературному пластичному деформуванні, згідно з яким, використовують в'язко-пружну модель Максвелла та на базі монотонно зростаючої експоненціальної функції визначають напруги в поковці в залежності від швидкості деформації, модуля пружності Юнга та часу релаксації [1]. Відомий також, вибраний як прототип, спосіб проектування систем керування гідравлічними пресами, згідно з яким, задаються значенням коефіцієнта якості гідросистеми α, теоретично за наближеними формулами із застосуванням креслень розводок трубопроводів визначають відповідні параметри гідравлічної системи при умові, що тиск в акумуляторі та величина відкриття дросельно-регулювальних клапанів постійні. На базі визначених параметрів проектують систему керування гідравлічним пресом, виготовляють її в металі, здійснюють монтаж та випробування [2]. Загальними суттєвими ознаками відомого і способу, що заявляється, є: визначення відповідних параметрів гідравлічної системи в залежності від заданого коефіцієнта якості гідросистеми α, на базі якого проектують систему керування гідравлічним пресом, виготовляють в металі, здійснюють її монтаж та випробування. Недоліком цього процесу є неврахування на етапі проектування гідравлічного приводу інерційного вибігу рухомої поперечини під час процесу знеміцнення металу поковки при високотемпературному пластичному деформуванні наприкінці робочого ходу. Це призводить до необхідності перебудування вже виготовленої в металі системи керування для досягнення її необхідних параметрів. В основу корисної моделі поставлена задача: підвищення точності кування за рахунок технічного результату, що полягає в усуненні впливу інерційного вибігу рухомої поперечини під час процесу знеміцнення на кінцеві розміри поковки шляхом суттєвого зменшення приведених мас гідроприводу на ділянці "напірний клапан робочих циліндрів - робочий циліндр". Поставлена задача вирішується тим, що зменшують приведені до рухомої поперечини маси на ділянці гідроприводу "напірний клапан робочих циліндрів-робочий циліндр" до величини, достатньої для усунення інерційного вибігу при знеміцненні металу поковки при закритті напірного клапана наприкінці робочого ходу в залежності від властивостей поковки, що обробляється. За рахунок суттєвого зменшення приведених мас гідроприводу на ділянці "напірний клапан робочих циліндрів-робочий циліндр" усувається вплив інерційного вибігу рухомої поперечини під час процесу знеміцнення на кінцеві розміри поковки. Як результат цього - підвищується точність кування поковок. Запропонований спосіб здійснюється таким чином. Задаються значенням коефіцієнта якості гідросистеми, визначають відповідні параметри гідравлічної системи, на базі яких проектують систему керування гідравлічним пресом, виготовляють її в металі, здійснюють монтаж та випробування. Зменшують приведені до рухомої поперечини маси на ділянці гідроприводу "напірний клапан робочих циліндрів-робочий циліндр" до величини, достатньої для усунення інерційного вибігу при знеміцненні металу поковки при закритті напірного клапана наприкінці робочого ходу в залежності від властивостей поковки, що обробляється. Приклад здійснення способу. Спосіб проектування швидкодіючих систем керування гідравлічними пресами може бути реалізований наступним чином. 1. Задаються значенням коефіцієнта якості гідросистеми. 2. Визначають відповідні параметри гідравлічної системи, на базі яких її проектують, виготовляють в металі, здійснюють монтаж та випробування. 3. Зменшують приведені до рухомої поперечини маси на ділянці гідроприводу "напірний клапан робочих циліндрів-робочий циліндр" до величини, достатньої для усунення інерційного вибігу при знеміцненні металу поковки при закритті напірного клапана наприкінці робочого ходу в залежності від властивостей поковки, що обробляється. На практиці це можна здійснити шляхом максимального наближення напірного клапана до робочого циліндра. Наведений приклад підтверджує досягнення технічного результату - а саме: підвищення точності кування поковок на гідравлічних пресах. Джерела інформації: 1 UA 107951 U 5 1. Марков О.Е. Установление аналитической связи между напряжениями и скоростями деформаций для моделирования процессов горячего деформирования / О.М. Марков // КШП. ОМД. - Москва, 2012. - № 7. - С. 32-37. 2. Cold and hot forging: fundamentals and applications / Taylan Altan, Gracious Ngaile, Gangshu Shen. - ASM International, 2004. - 334 p. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 10 15 Спосіб проектування швидкодіючих систем керування гідравлічними пресами, що полягає у визначенні відповідних параметрів гідравлічної системи в залежності від заданого коефіцієнта якості гідросистеми , на базі якого проектують систему керування гідравлічним пресом, виготовляють в металі, здійснюють її монтаж та випробування, який відрізняється тим, що зменшують приведені до рухомої поперечини маси на ділянці гідроприводу "напірний клапан робочих циліндрів-робочий циліндр" до величини, достатньої для усунення інерційного вибігу при знеміцненні металу поковки при закритті напірного клапана наприкінці робочого ходу в залежності від властивостей поковки, що обробляється. Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
МПК / Мітки
МПК: F16K 17/00, B30B 15/00
Мітки: систем, пресами, швидкодіючих, спосіб, гідравлічними, проектування, керування
Код посилання
<a href="https://ua.patents.su/4-107951-sposib-proektuvannya-shvidkodiyuchikh-sistem-keruvannya-gidravlichnimi-presami.html" target="_blank" rel="follow" title="База патентів України">Спосіб проектування швидкодіючих систем керування гідравлічними пресами</a>
Спосіб проектування швидкодіючих систем керування гідравлічними пресами
Номер патенту: 105610
Опубліковано: 25.03.2016
Автор: Корчак Олена Сергіївна
МПК: B30B 15/00, F16K 17/00
Мітки: керування, пресами, проектування, гідравлічними, спосіб, швидкодіючих, систем
Формула / Реферат:
Спосіб проектування швидкодіючих систем керування гідравлічними пресами, що полягає у визначенні відповідних параметрів гідравлічної системи в залежності від заданого коефіцієнта якості гідросистеми a, на базі якого проектується система керування гідравлічним пресом, виготовляється в металі, здійснюється її монтаж та випробування, який відрізняється тим, що параметри гідроліній системи керування визначаються за допомогою діаграми залежності...
Спосіб створення систем керування гідравлічними пресами з необхідними швидкісними параметрами
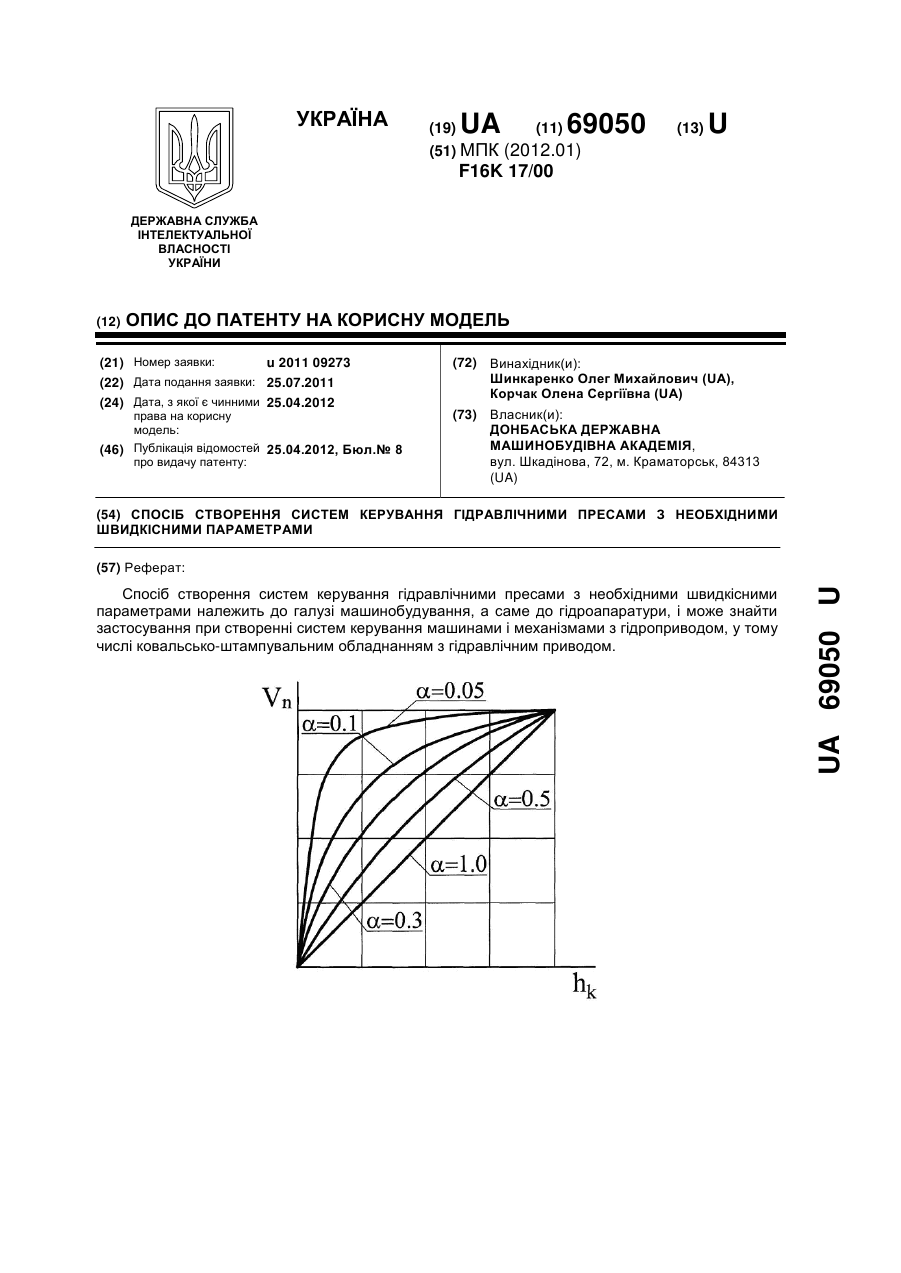
Номер патенту: 69050
Опубліковано: 25.04.2012
Автори: Корчак Олена Сергіївна, Шинкаренко Олег Михайлович
МПК: F16K 17/00
Мітки: створення, гідравлічними, параметрами, швидкісними, керування, необхідними, систем, спосіб, пресами
Формула / Реферат:
Спосіб створення систем керування гідравлічними пресами з необхідними швидкісними параметрами, згідно з яким теоретично визначають відповідні параметри гідравлічної системи, на їх базі проектують систему керування гідравлічним пресом, виготовляють її в металі, здійснюють монтаж та випробування, який відрізняється тим, що на етапі проектування системи керування гідробалони акумулятора максимально наближають до преса, магістраль...
Спосіб керування ходом наближення рухомої поперечини гідравлічного преса до поковки
Номер патенту: 79294
Опубліковано: 25.04.2013
Автор: Корчак Олена Сергіївна
МПК: B30B 15/16, B30B 15/00
Мітки: спосіб, ходом, преса, поперечини, поковки, наближення, рухомої, гідравлічного, керування
Формула / Реферат:
Спосіб керування ходом наближення рухомої поперечини гідравлічного преса до поковки, який полягає у тому, що примусово відкривають зливний клапан зворотних циліндрів та наповнювально-зливний клапан, поперечина під дією своєї ваги рухається униз, а робочі циліндри заповнюються рідиною низького тиску із наповнювально-зливного бака через відкритий наповнювально-зливний клапан, який відрізняється тим, що поточну висоту підйому зливного клапана...
Спосіб створення систем низького тиску потужних ковальських гідравлічних пресів з необхідними швидкісними параметрами
Номер патенту: 91505
Опубліковано: 10.07.2014
Автори: Корчак Олена Сергіївна, Дейнека Дмитро Віталійович
МПК: F16K 17/00, B30B 15/00
Мітки: низького, тиску, параметрами, гідравлічних, створення, систем, необхідними, ковальських, швидкісними, пресів, потужних, спосіб
Формула / Реферат:
Спосіб створення систем низького тиску потужних ковальських гідравлічних пресів з необхідними швидкісними параметрами, який полягає у теоретичному визначенні відповідних параметрів системи низького тиску, на базі яких її виготовляють в металі, здійснюють монтаж та випробування, який відрізняється тим, що на етапі проектування системи низького тиску бак наповнення максимально наближують до преса, магістраль "бак наповнення - прес"...
Автоматизований комплекс проектування складних технічних систем та засобів для залізничного транспорту
Номер патенту: 49923
Опубліковано: 11.05.2010
Автор: Сендецький Микола Миколайович
МПК: G06F 7/00, G06F 5/00, G05B 15/00
Мітки: транспорту, систем, автоматизований, складних, засобів, технічних, залізничного, проектування, комплекс
Формула / Реферат:
Автоматизований комплекс проектування складних технічних систем та засобів для залізничного транспорту, що містить командний блок постановки завдань і керування процесом формування об'єкта, систему обґрунтування рівня якості створюваного об'єкта, систему формування виду перспективного складного об'єкта, центральну систему введення даних, підсистему вибору оптимального варіанта техніко-економічних вимог та тактико-технічних вимог і...
Попередній патент: Спосіб виготовлення порожнистих виробів типу стакана
Наступний патент: Закупорювальний пристрій з індикацією першого відкривання
Випадковий патент: Трубчаста піч