Спосіб керування ходом наближення рухомої поперечини гідравлічного преса до поковки

Формула / Реферат
Спосіб керування ходом наближення рухомої поперечини гідравлічного преса до поковки, який полягає у тому, що примусово відкривають зливний клапан зворотних циліндрів та наповнювально-зливний клапан, поперечина під дією своєї ваги рухається униз, а робочі циліндри заповнюються рідиною низького тиску із наповнювально-зливного бака через відкритий наповнювально-зливний клапан, який відрізняється тим, що поточну висоту підйому зливного клапана зворотних циліндрів визначають засобом його контролю у кожний момент ходу наближення рухомої поперечини до поковки та контролюють у відповідності до закладеного в систему автоматичного керування алгоритму за залежністю пропускної здатності наповнювальної системи у вигляді
 ,
,
де ![]() - тиск у наповнювально-зливному баці, Па;
- тиск у наповнювально-зливному баці, Па; ![]() - сумарний коефіцієнт гідравлічного опору наповнювальної магістралі;
- сумарний коефіцієнт гідравлічного опору наповнювальної магістралі; ![]() - сума активних та сил опору при русі поперечини на ході наближення, Н;
- сума активних та сил опору при русі поперечини на ході наближення, Н; ![]() - коефіцієнт в'язкого гідравлічного опору руху поперечини, кг/м;
- коефіцієнт в'язкого гідравлічного опору руху поперечини, кг/м; ![]() - коефіцієнт якості магістралі "зворотні циліндри - наповнювально-зливний бак";
- коефіцієнт якості магістралі "зворотні циліндри - наповнювально-зливний бак"; ![]() ,
, ![]() - максимальна і поточна величини висоти підйому зливного клапана зворотних циліндрів, м;
- максимальна і поточна величини висоти підйому зливного клапана зворотних циліндрів, м; ![]() - активна площа робочого циліндра преса, м2;
- активна площа робочого циліндра преса, м2; ![]() - площа поперечного перерізу наповнювальної магістралі, м2;
- площа поперечного перерізу наповнювальної магістралі, м2; ![]() - щільність робочої рідини, кг/м3;
- щільність робочої рідини, кг/м3; ![]() - різниця рівнів рідини у наповнювально-зливному баці та робочому циліндрі, м;
- різниця рівнів рідини у наповнювально-зливному баці та робочому циліндрі, м; ![]() - прискорення вільного падіння, кг/мс2;
- прискорення вільного падіння, кг/мс2; ![]() - мінімально припустимий тиск у робочому циліндрі при його заповненні рідиною низького тиску, що задаєтьсядля конкретної гідравлічної системи, Па,
- мінімально припустимий тиск у робочому циліндрі при його заповненні рідиною низького тиску, що задаєтьсядля конкретної гідравлічної системи, Па,
а у випадку невиконання наведеної нерівності системою автоматичного керування діють на засоби регулювання зливного клапана зворотних циліндрів, змінюючи висоту його підйому.
Текст
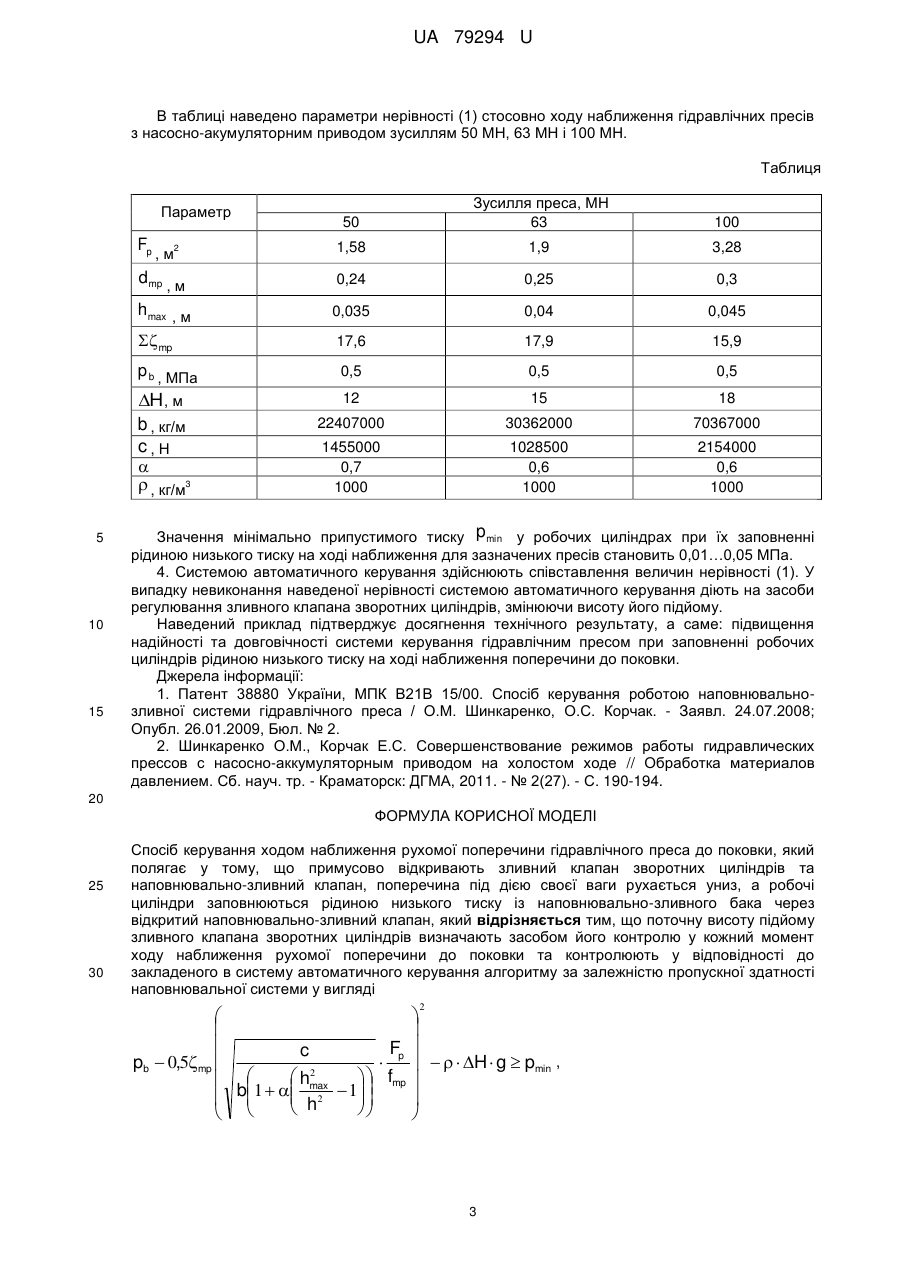
Реферат: UA 79294 U UA 79294 U 5 10 15 20 25 30 Корисна модель належить до галузі машинобудування, а саме до обробки матеріалів тиском, і може знайти застосування при створенні та подальшій експлуатації ковальськоштампувального обладнання з гідравлічним приводом. Відомий спосіб керування роботою наповнювально-зливної системи гідравлічного преса, який здійснюється шляхом відкриття наповнювально-зливного клапана під час ходу наближення, його закриття під час робочого ходу та відкриття на зворотному ході. Наповнювально-зливним клапаном керує індивідуальний сервопривод так, що клапан примусово знаходиться у постійно відкритому стані, а його примусове закриття сервоприводом здійснюється тільки під час робочого ходу, при цьому рідина високого тиску подається у робочі циліндри преса тільки після того, як спрацює датчик закриття наповнювально-зливного клапана [1]. Відомий також, вибраний як найближчий аналог, спосіб здійснення ходу наближення гідравлічного преса, при якому примусово відкривають зливний клапан зворотних циліндрів та наповнювально-зливний клапан. Внаслідок цього рухома поперечина під дією своєї ваги рухається униз, а робочі циліндри заповнюються рідиною низького тиску із наповнювальнозливного бака через відкритий наповнювально-зливний клапан [2]. Загальними суттєвими ознаками відомого і способу, що заявляється, є наступне: примусово відкривають зливний клапан зворотних циліндрів та наповнювально-зливний клапан, поперечина під дією своєї ваги рухається униз, а робочі циліндри заповнюються рідиною низького тиску із наповнювально-зливного бака через відкритий наповнювально-зливний клапан. Для цього процесу характерним є те, що під час заповнення робочих циліндрів рідиною низького тиску має місце їх рідинне голодування, що супроводжується гідроударними та коливальними явищами. Посилює рідинне голодування невзаємозв'язана робота зливного клапана зворотних циліндрів та наповнювально-зливної системи. В основу корисної моделі поставлена задача: підвищення надійності та довговічності системи керування гідравлічним пресом при заповненні робочих циліндрів рідиною низького тиску за рахунок технічного результату, що полягає у запобіганні рідинному голодуванню робочих циліндрів на ході наближення поперечини до поковки. Поставлена задача вирішується тим, що поточну висоту підйому зливного клапана зворотних циліндрів визначають засобом його контролю у кожний момент ходу наближення рухомої поперечини до поковки та контролюють у відповідності до закладеного в систему автоматичного керування алгоритму за залежністю пропускної здатності наповнювальної системи у вигляді 2 35 F c pb 0.5 mp p H g pmin h2 fmp b1 max 1 h2 , де p b - тиск у наповнювально-зливному баці, Па; mp - сумарний коефіцієнт гідравлічного опору наповнювальної магістралі; c - сума активних та сил опору при русі поперечини на ході наближення, Н; b - коефіцієнт в'язкого гідравлічного опору руху поперечини, кг/м; коефіцієнт якості магістралі "зворотні циліндри - наповнювально-зливний бак"; hmax , h 40 максимальна і поточна величини висоти підйому зливного клапана зворотних циліндрів, м; 2 Fp f активна площа робочого циліндра преса, м ; mp - площа поперечного перерізу наповнювальної 2 3 магістралі, м ; - щільність робочої рідини, кг/м ; H - різниця рівнів рідини у наповнювальнозливному баці та робочому циліндрі, м; g - прискорення вільного падіння, кг/мс ; pmin мінімально припустимий тиск у робочому циліндрі при його заповненні рідиною низького тиску, що задається для конкретної гідравлічної системи, Па, а у випадку невиконання наведеної нерівності системою автоматичного керування діють на засоби регулювання зливного клапана зворотних циліндрів, змінюючи висоту його підйому. За рахунок того, що поточну висоту підйому зливного клапана зворотних циліндрів визначають засобом його контролю у кожний момент ходу наближення рухомої поперечини до 2 45 1 UA 79294 U 5 10 15 20 25 30 поковки та контролюють у відповідності до закладеного в систему автоматичного керування алгоритму за залежністю пропускної здатності наповнювальної системи, а у випадку невиконання цієї залежності системою автоматичного керування діють на засоби регулювання зливного клапана зворотних циліндрів, змінюючи висоту його підйому, забезпечуються найбільш сприятливі умови здійснення заповнення робочих циліндрів рідиною низького тиску та запобігання їх рідинному голодуванню на ході наближення поперечини до поковки. Як результат цього - підвищуються надійність та довговічність системи керування гідравлічним пресом при заповненні робочих циліндрів рідиною низького тиску. Запропонований спосіб здійснюється в такій послідовності дій: для здійснення ходу наближення поперечини до поковки примусово відкривають зливний клапан зворотних циліндрів та наповнювально-зливний клапан; рухома поперечина під дією своєї ваги рухається униз, а робочі циліндри заповнюються рідиною низького тиску із наповнювально-зливного бака через відкритий наповнювальнозливний клапан; поточну висоту підйому зливного клапана зворотних циліндрів визначають засобом його контролю у кожний момент ходу наближення рухомої поперечини до поковки та контролюють у відповідності до закладеного в систему автоматичного керування алгоритму за залежністю пропускної здатності наповнювальної системи; у випадку невиконання зазначеної залежності системою автоматичного керування діють на засоби регулювання зливного клапана зворотних циліндрів, змінюючи висоту його підйому. Приклад здійснення способу. Здійснити керування ходом наближення рухомої поперечини гідравлічного преса до поковки можна наступним чином. 1. На ході наближення здійснюється заповнення робочих циліндрів преса рідиною низького тиску. З цією метою примусово відкривають зливний клапан зворотних циліндрів та наповнювально-зливний клапан. Внаслідок цього рухома поперечина під дією своєї ваги рухається униз, а робочі циліндри заповнюються рідиною низького тиску із наповнювальнозливного бака через відкритий наповнювально-зливний клапан. Зливний клапан зворотних циліндрів постачають засобами регулювання (сервопривод) і контролю (датчик лінійних переміщень). 2. Поточну висоту підйому зливного клапана зворотних циліндрів визначають засобом його контролю - датчиком лінійних переміщень - у кожний момент ходу наближення рухомої поперечини до поковки та контролюють у відповідності до закладеного в систему автоматичного керування алгоритму за залежністю пропускної здатності наповнювальної системи у вигляді 2 35 Fp c H g pmin p b 0.5 mp 2 hmax fmp b1 h 2 1 , (1) де p b - тиск у наповнювально-зливному баці, Па; mp - сумарний коефіцієнт гідравлічного опору наповнювальної магістралі; c - сума активних та сил опору при русі поперечини на ході наближення, Н; b - коефіцієнт в'язкого гідравлічного опору руху поперечини, кг/м; коефіцієнт якості магістралі "зворотні циліндри - наповнювально-зливний бак"; hmax , h 40 максимальна і поточна величини висоти підйому зливного клапана зворотних циліндрів, м; 2 Fp f активна площа робочого циліндра преса, м ; mp - площа поперечного перерізу наповнювальної 2 3 магістралі, м ; - щільність робочої рідини, кг/м ; H - різниця рівнів рідини у наповнювальнозливному баці та робочому циліндрі, м; g - прискорення вільного падіння, кг/мс ; pmin мінімально припустимий тиск у робочому циліндрі при його заповненні рідиною низького тиску, що задається для конкретної гідравлічної системи, Па. 3. Значення h - поточна величина висоти підйому зливного клапана зворотних циліндрів надходить до системи автоматичного керування пресом від датчика лінійних переміщень. Інші величини визначаються параметрами конкретної гідравлічної системи. 2 45 2 UA 79294 U В таблиці наведено параметри нерівності (1) стосовно ходу наближення гідравлічних пресів з насосно-акумуляторним приводом зусиллям 50 МН, 63 МН і 100 МН. Таблиця 50 Зусилля преса, ΜΗ 63 100 Fp , м2 1,58 1,9 3,28 dmp , м 0,24 0,25 0,3 hmax , м mp 0,035 0,04 0,045 17,6 17,9 15,9 p b , МПа 0,5 0,5 0,5 H , м b , кг/м c, Н , кг/м3 12 15 18 22407000 30362000 70367000 1455000 0,7 1000 1028500 0,6 1000 2154000 0,6 1000 Параметр 5 10 15 Значення мінімально припустимого тиску pmin у робочих циліндрах при їх заповненні рідиною низького тиску на ході наближення для зазначених пресів становить 0,01…0,05 МПа. 4. Системою автоматичного керування здійснюють співставлення величин нерівності (1). У випадку невиконання наведеної нерівності системою автоматичного керування діють на засоби регулювання зливного клапана зворотних циліндрів, змінюючи висоту його підйому. Наведений приклад підтверджує досягнення технічного результату, а саме: підвищення надійності та довговічності системи керування гідравлічним пресом при заповненні робочих циліндрів рідиною низького тиску на ході наближення поперечини до поковки. Джерела інформації: 1. Патент 38880 України, МПК В21В 15/00. Спосіб керування роботою наповнювальнозливної системи гідравлічного преса / О.М. Шинкаренко, О.С. Корчак. - Заявл. 24.07.2008; Опубл. 26.01.2009, Бюл. № 2. 2. Шинкаренко О.М., Корчак Е.С. Совершенствование режимов работы гидравлических прессов с насосно-аккумуляторным приводом на холостом ходе // Обработка материалов давлением. Сб. науч. тр. - Краматорск: ДГМА, 2011. - № 2(27). - С. 190-194. 20 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 25 30 Спосіб керування ходом наближення рухомої поперечини гідравлічного преса до поковки, який полягає у тому, що примусово відкривають зливний клапан зворотних циліндрів та наповнювально-зливний клапан, поперечина під дією своєї ваги рухається униз, а робочі циліндри заповнюються рідиною низького тиску із наповнювально-зливного бака через відкритий наповнювально-зливний клапан, який відрізняється тим, що поточну висоту підйому зливного клапана зворотних циліндрів визначають засобом його контролю у кожний момент ходу наближення рухомої поперечини до поковки та контролюють у відповідності до закладеного в систему автоматичного керування алгоритму за залежністю пропускної здатності наповнювальної системи у вигляді 2 Fp c pb 0,5 mp H g pmin , 2 hmax fmp b1 h2 1 3 UA 79294 U де pb - тиск у наповнювально-зливному баці, Па; mp - сумарний коефіцієнт гідравлічного опору наповнювальної магістралі; c - сума активних та сил опору при русі поперечини на ході наближення, Н; b - коефіцієнт в'язкого гідравлічного опору руху поперечини, кг/м; коефіцієнт якості магістралі "зворотні циліндри - наповнювально-зливний бак"; h m ax , 5 h максимальна і поточна величини висоти підйому зливного клапана зворотних циліндрів, м; Fp 2 активна площа робочого циліндра преса, м ; fmp - площа поперечного перерізу наповнювальної 2 10 3 магістралі, м ; - щільність робочої рідини, кг/м ; H - різниця рівнів рідини у наповнювально2 зливному баці та робочому циліндрі, м; g - прискорення вільного падіння, кг/мс ; pmin мінімально припустимий тиск у робочому циліндрі при його заповненні рідиною низького тиску, що задається для конкретної гідравлічної системи, Па, а у випадку невиконання наведеної нерівності системою автоматичного керування діють на засоби регулювання зливного клапана зворотних циліндрів, змінюючи висоту його підйому. Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of control of approaching of moving crossbeam of hydraulic press to forging
Автори англійськоюKorchak Olena Serhiivna
Назва патенту російськоюСпособ управления ходом приближения подвижной перекладины гидравлического пресса к поковке
Автори російськоюКорчак Елена Сергеевна
МПК / Мітки
МПК: B30B 15/00, B30B 15/16
Мітки: спосіб, преса, керування, поковки, рухомої, поперечини, гідравлічного, наближення, ходом
Код посилання
<a href="https://ua.patents.su/6-79294-sposib-keruvannya-khodom-nablizhennya-rukhomo-poperechini-gidravlichnogo-presa-do-pokovki.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування ходом наближення рухомої поперечини гідравлічного преса до поковки</a>
Спосіб регулювання швидкості переміщення рухомої поперечини гідравлічного преса
Номер патенту: 59250
Опубліковано: 10.05.2011
Автори: Корчак Олена Сергіївна, Літош Катерина Миколаївна
МПК: B21J 9/02
Мітки: поперечини, гідравлічного, переміщення, рухомої, регулювання, преса, спосіб, швидкості
Формула / Реферат:
Спосіб регулювання швидкості переміщення рухомої поперечини гідравлічного преса шляхом підвищенням тертя в зворотних циліндрах у міру закриття їх впускного клапана, який відрізняється тим, що регулювання здійснюють шляхом урахування величини поточного тиску в робочих циліндрах, що контролюється датчиками тиску, які пов'язані із пристроями тертя зворотних циліндрів та клапанами їх розподільника.
Система регулювання швидкості переміщення рухомої поперечини гідравлічного преса

Номер патенту: 65320
Опубліковано: 12.12.2011
Автор: Корчак Олена Сергіївна
МПК: B21J 9/00
Мітки: гідравлічного, регулювання, система, преса, швидкості, поперечини, рухомої, переміщення
Формула / Реферат:
Система регулювання швидкості переміщення рухомої поперечини гідравлічного преса, яка вміщує зворотні циліндри та клапанний розподільник, з'єднані системою гідроліній, при цьому зворотні циліндри оснащено пристроями змінного тертя, які встановлені у кожному циліндрі та програмно сполучені із засобами регулювання та контролю клапанів розподільника зворотних циліндрів, який відрізняється тим, що робочі циліндри оснащено датчиками тиску, які...
Спосіб регулювання швидкості переміщення рухомої поперечини гідравлічного преса
Номер патенту: 59108
Опубліковано: 10.05.2011
Автор: Корчак Олена Сергіївна
МПК: B21J 9/00
Мітки: переміщення, регулювання, швидкості, преса, рухомої, гідравлічного, спосіб, поперечини
Формула / Реферат:
Спосіб регулювання швидкості переміщення рухомої поперечини гідравлічного преса, що здійснюється зміною гідравлічного опору дросельних елементів на вході зворотних циліндрів у міру закриття і відкриття клапанів їх розподільника, який відрізняється тим, що регулювання здійснюється шляхом урахування величини поточного тиску в робочих циліндрах, що контролюється датчиками тиску, які зв'язані із дросельними елементами та клапанами розподільника...
Система регулювання швидкості переміщення рухомої поперечини гідравлічного преса
Номер патенту: 59245
Опубліковано: 10.05.2011
Автор: Корчак Олена Сергіївна
МПК: B21J 9/12
Мітки: поперечини, швидкості, регулювання, рухомої, гідравлічного, преса, система, переміщення
Формула / Реферат:
Система регулювання швидкості переміщення рухомої поперечини гідравлічного преса, яка включає зворотні циліндри та клапанний розподільник, з'єднані системою гідроліній, при цьому зворотні циліндри оснащено регульованими дросельними елементами, які встановлені на вході кожного циліндра та програмно сполучені із засобами регулювання та контролю клапанів розподільника зворотних циліндрів, яка відрізняється тим, що робочі циліндри оснащено...
Спосіб регулювання швидкості переміщення рухомої поперечини гідравлічного преса
Номер патенту: 39748
Опубліковано: 10.03.2009
Автор: Корчак Олена Сергіївна
МПК: B21J 9/00
Мітки: рухомої, гідравлічного, регулювання, швидкості, поперечини, спосіб, преса, переміщення
Формула / Реферат:
Спосіб регулювання швидкості переміщення рухомої поперечини гідравлічного преса шляхом створення гідравлічного опору, який відрізняється тим, що регулювання здійснюється шляхом зміни опору дросельних елементів на вході зворотних циліндрів у міру закриття і відкриття клапанів їх розподільника.
Попередній патент: Спосіб виготовлення труб
Наступний патент: Спосіб запобігання рідинному голодуванню робочих циліндрів гідравлічного преса на ходу наближення
Випадковий патент: Механізм безпеки для зовнішнього програмного коду