Спосіб визначення центру мас безпілотного літального апарата
Номер патенту: 109102
Опубліковано: 10.08.2016
Автори: Бетін Олександр Володимирович, Бетін Денис Олександрович, Шакурі Алі

Формула / Реферат
Спосіб визначення центру мас безпілотного літального апарата, згідно з яким безпілотний літальний апарат підвішують за допомогою підйомного пристрою, який відрізняється тим, що використовують підйомний пристрій, оснащений підшипником в опорній точці, багаторазово змінюють нахил безпілотного літального апарата, використовуючи додаткові вантажі, після чого кожного разу визначають кут нахилу безпілотного літального апарата, вимірюючи висоту двох зазначених точок на фюзеляжі нівеліром, записують ваги додаткових вантажів і відповідні кути, розраховують центр мас шляхом перетину графіків зміни ваги додаткових вантажів відносно тангенса кута нахилу з головними осями.
Текст
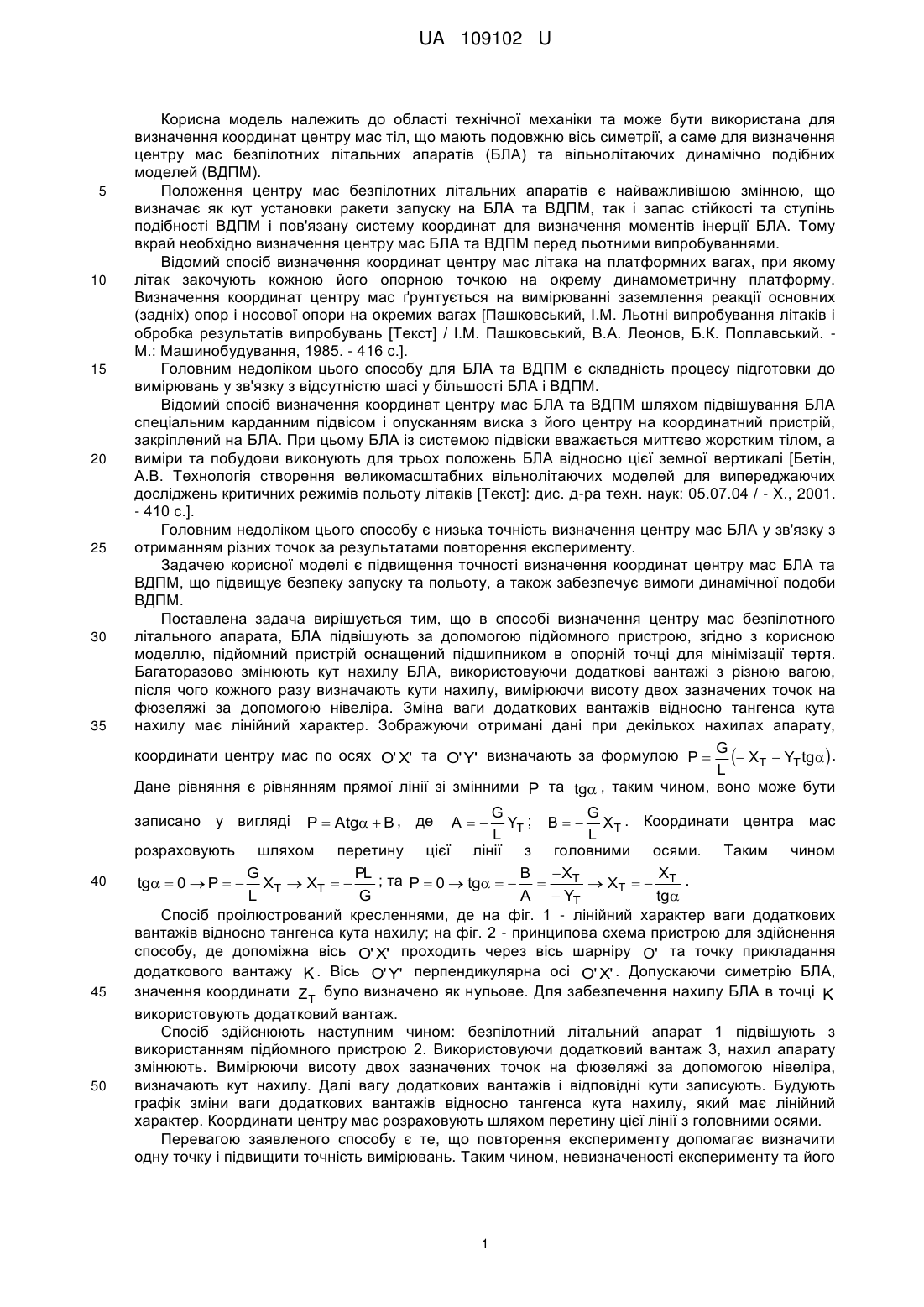
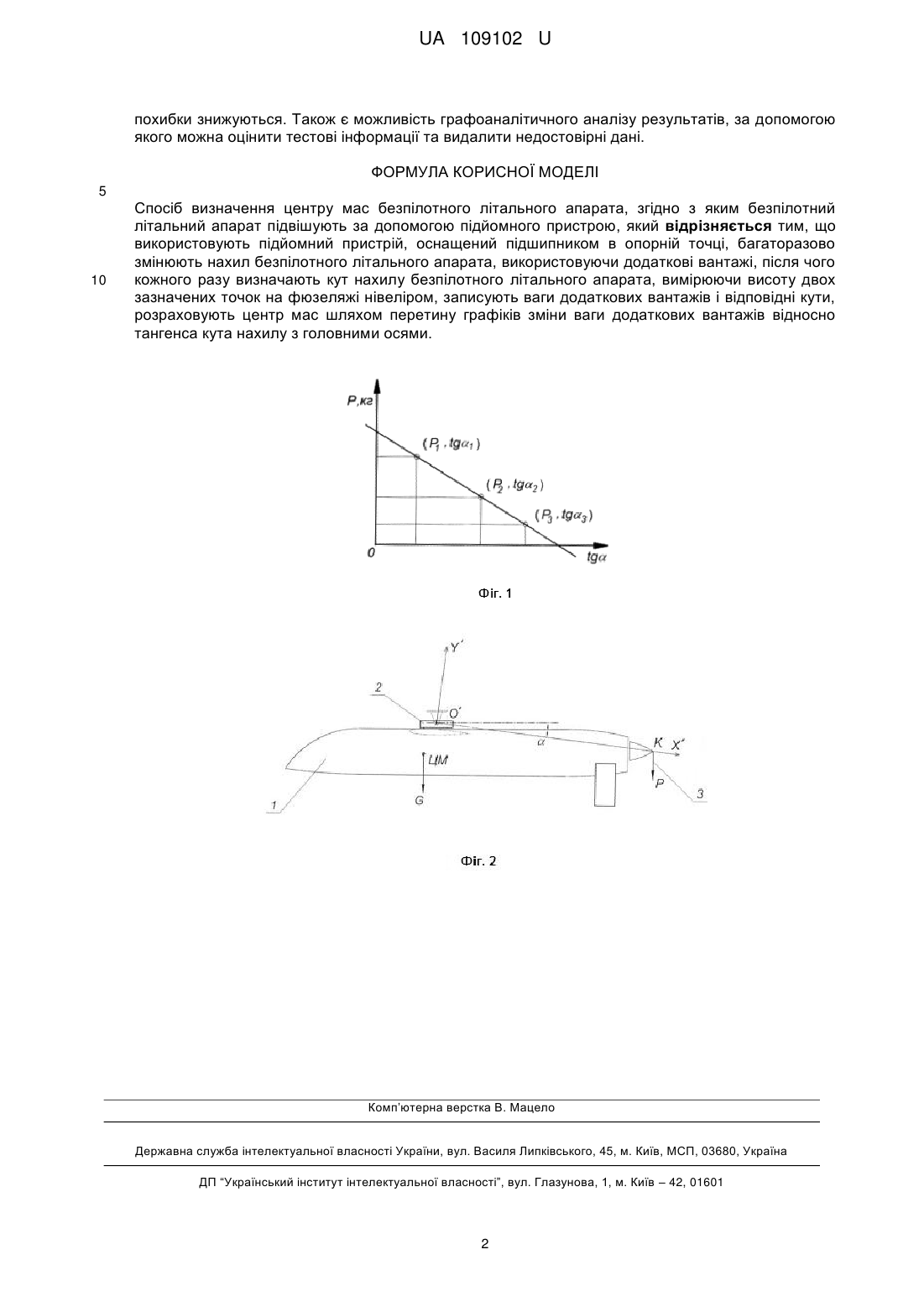
Реферат: Спосіб визначення центру мас безпілотного літального апарата, згідно з яким безпілотний літальний апарат підвішують за допомогою підйомного пристрою. Використовують підйомний пристрій, оснащений підшипником в опорній точці, багаторазово змінюють нахил безпілотного літального апарата, використовуючи додаткові вантажі, після чого кожного разу визначають кут нахилу безпілотного літального апарата, вимірюючи висоту двох зазначених точок на фюзеляжі нівеліром, записують ваги додаткових вантажів і відповідні кути, розраховують центр мас шляхом перетину графіків зміни ваги додаткових вантажів відносно тангенса кута нахилу з головними осями. UA 109102 U (54) СПОСІБ ВИЗНАЧЕННЯ ЦЕНТРУ МАС БЕЗПІЛОТНОГО ЛІТАЛЬНОГО АПАРАТА UA 109102 U UA 109102 U 5 10 15 20 25 30 35 Корисна модель належить до області технічної механіки та може бути використана для визначення координат центру мас тіл, що мають подовжню вісь симетрії, а саме для визначення центру мас безпілотних літальних апаратів (БЛА) та вільнолітаючих динамічно подібних моделей (ВДПМ). Положення центру мас безпілотних літальних апаратів є найважливішою змінною, що визначає як кут установки ракети запуску на БЛА та ВДПМ, так і запас стійкості та ступінь подібності ВДПМ і пов'язану систему координат для визначення моментів інерції БЛА. Тому вкрай необхідно визначення центру мас БЛА та ВДПМ перед льотними випробуваннями. Відомий спосіб визначення координат центру мас літака на платформних вагах, при якому літак закочують кожною його опорною точкою на окрему динамометричну платформу. Визначення координат центру мас ґрунтується на вимірюванні заземлення реакції основних (задніх) опор і носової опори на окремих вагах [Пашковський, І.М. Льотні випробування літаків і обробка результатів випробувань [Текст] / І.М. Пашковський, В.А. Леонов, Б.К. Поплавський. М.: Машинобудування, 1985. - 416 с.]. Головним недоліком цього способу для БЛА та ВДПМ є складність процесу підготовки до вимірювань у зв'язку з відсутністю шасі у більшості БЛА і ВДПМ. Відомий спосіб визначення координат центру мас БЛА та ВДПМ шляхом підвішування БЛА спеціальним карданним підвісом і опусканням виска з його центру на координатний пристрій, закріплений на БЛА. При цьому БЛА із системою підвіски вважається миттєво жорстким тілом, а виміри та побудови виконують для трьох положень БЛА відносно цієї земної вертикалі [Бетін, А.В. Технологія створення великомасштабних вільнолітаючих моделей для випереджаючих досліджень критичних режимів польоту літаків [Текст]: дис. д-ра техн. наук: 05.07.04 / - X., 2001. - 410 с.]. Головним недоліком цього способу є низька точність визначення центру мас БЛА у зв'язку з отриманням різних точок за результатами повторення експерименту. Задачею корисної моделі є підвищення точності визначення координат центру мас БЛА та ВДПМ, що підвищує безпеку запуску та польоту, а також забезпечує вимоги динамічної подоби ВДПМ. Поставлена задача вирішується тим, що в способі визначення центру мас безпілотного літального апарата, БЛА підвішують за допомогою підйомного пристрою, згідно з корисною моделлю, підйомний пристрій оснащений підшипником в опорній точці для мінімізації тертя. Багаторазово змінюють кут нахилу БЛА, використовуючи додаткові вантажі з різною вагою, після чого кожного разу визначають кути нахилу, вимірюючи висоту двох зазначених точок на фюзеляжі за допомогою нівеліра. Зміна ваги додаткових вантажів відносно тангенса кута нахилу має лінійний характер. Зображуючи отримані дані при декількох нахилах апарату, G координати центру мас по осях O' X' та O' Y' визначають за формулою P XT YT tg . L Дане рівняння є рівнянням прямої лінії зі змінними P та tg , таким чином, воно може бути G G YT ; B X T . Координати центра мас L L розраховують шляхом перетину цієї лінії з головними осями. Таким чином B XT X G PL ; та P 0 tg XT T . tg 0 P XT XT A YT tg L G Спосіб проілюстрований кресленнями, де на фіг. 1 - лінійний характер ваги додаткових вантажів відносно тангенса кута нахилу; на фіг. 2 - принципова схема пристрою для здійснення способу, де допоміжна вісь O' X' проходить через вісь шарніру O' та точку прикладання додаткового вантажу K . Вісь O' Y' перпендикулярна осі O' X' . Допускаючи симетрію БЛА, значення координати ZT було визначено як нульове. Для забезпечення нахилу БЛА в точці K використовують додатковий вантаж. Спосіб здійснюють наступним чином: безпілотний літальний апарат 1 підвішують з використанням підйомного пристрою 2. Використовуючи додатковий вантаж 3,нахил апарату змінюють. Вимірюючи висоту двох зазначених точок на фюзеляжі за допомогою нівеліра, визначають кут нахилу. Далі вагу додаткових вантажів і відповідні кути записують. Будують графік зміни ваги додаткових вантажів відносно тангенса кута нахилу, який має лінійний характер. Координати центру мас розраховують шляхом перетину цієї лінії з головними осями. Перевагою заявленого способу є те, що повторення експерименту допомагає визначити одну точку і підвищити точність вимірювань. Таким чином, невизначеності експерименту та його записано у вигляді 40 45 50 P Atg B , де A 1 UA 109102 U похибки знижуються. Також є можливість графоаналітичного аналізу результатів, за допомогою якого можна оцінити тестові інформації та видалити недостовірні дані. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 Спосіб визначення центру мас безпілотного літального апарата, згідно з яким безпілотний літальний апарат підвішують за допомогою підйомного пристрою, який відрізняється тим, що використовують підйомний пристрій, оснащений підшипником в опорній точці, багаторазово змінюють нахил безпілотного літального апарата, використовуючи додаткові вантажі, після чого кожного разу визначають кут нахилу безпілотного літального апарата, вимірюючи висоту двох зазначених точок на фюзеляжі нівеліром, записують ваги додаткових вантажів і відповідні кути, розраховують центр мас шляхом перетину графіків зміни ваги додаткових вантажів відносно тангенса кута нахилу з головними осями. Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01M 1/00
Мітки: визначення, центру, спосіб, безпілотного, апарата, літального, мас
Код посилання
<a href="https://ua.patents.su/4-109102-sposib-viznachennya-centru-mas-bezpilotnogo-litalnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення центру мас безпілотного літального апарата</a>
Триопорне шасі безпілотного літального апарата
Номер патенту: 86554
Опубліковано: 10.01.2014
Автори: Матійчик Михайло Петрович, Франчук Роман Миколайлович, Макарчук Максим Віталійович, Смирнов Ігор Дмитрович
МПК: B64C 25/00
Мітки: літального, безпілотного, шасі, апарата, триопорне
Формула / Реферат:
1. Триопорне шасі безпілотного літального апарата, з опорами із двох стержнів, що з'єднані шарнірно і обладнані поглинаючою пружиною, яке відрізняється тим, що у триопорному шасі з хвостовою опорою, всі опори виконані у вигляді ресор, основні опори винесені вперед, а контактні п'яти всіх опор мають конфігурацію лиж з випуклою тертьовою поверхнею збільшеної площі та загнутою у сторону, зворотну напрямку руху безпілотного літального...
Спосіб забезпечення зльоту безпілотного літального апарата зі стартової установки
Номер патенту: 106673
Опубліковано: 10.05.2016
Автори: Комаров Володимир Олександрович, Зірка Андрій Леонідович, Сорока Марія Василівна, Куровська Тетяна Юріївна, Расстригін Олександр Олексійович
МПК: B64F 1/00
Мітки: безпілотного, стартової, апарата, спосіб, установки, зльоту, забезпечення, літального
Формула / Реферат:
Спосіб забезпечення зльоту безпілотного літального апарата зі стартової установки, при якому підготовляють стартову установку, встановлюють стартову установку так, щоб її поздовжня вісь розташовувалася у вертикальній площині, підготовляють безпілотний літальний апарат до польоту, встановлюють безпілотний літальний апарат на стартову установку та фіксують за допомогою стопорного механізму, споряджають стартовий прискорювач, запускають силову...
Спосіб забезпечення зльоту безпілотного літального апарата з направляючої стартової установки
Номер патенту: 103520
Опубліковано: 25.12.2015
Автори: Расстригін Олександр Олексійович, Сорока Марія Василівна, Куровська Тетяна Юріївна, Зірка Андрій Леонідович, Комаров Володимир Олександрович
МПК: B64F 1/04, B64F 1/10, B64F 1/08, B64F 1/06
Мітки: установки, спосіб, безпілотного, літального, направляючої, стартової, зльоту, забезпечення, апарата
Формула / Реферат:
1. Спосіб забезпечення зльоту безпілотного літального апарата з направляючої стартової установки, при якому підготовляють стартову установку, що містить направляючу, закріплену до опорної конструкції, встановлюють стартову установку так, щоб її поздовжня вісь розташовувалася у вертикальній площині, виставляють кут нахилу направляючої стартової установки, підготовляють безпілотний літальний апарат до польоту, встановлюють безпілотний...
Пристрій для посадки безпілотного літального апарата
Номер патенту: 53306
Опубліковано: 11.10.2010
Автори: Удовенко Олександр Опанасович, Тупіцин Микола Федорович, Синєглазов Віктор Михайлович
МПК: B64F 1/00, B64C 25/00
Мітки: апарата, безпілотного, посадки, літального, пристрій
Формула / Реферат:
1. Пристрій для посадки безпілотного літального апарата, що містить гальмівний крюк, який своїм вільним кінцем з крюком виконує захват пружного троса перших гальмівних воріт, який відрізняється тим, що висота розміщення троса перших воріт Н1 більше, ніж висота розміщення троса других воріт Н2, на величину, так, що
Спосіб ведення повітряної розвідки за допомогою безпілотного літального апарата
Номер патенту: 31235
Опубліковано: 25.03.2008
Автори: Машталір Вадим Віталійович, Андрійченко Олег Станіславович, Анпьонов Валентин Вадимович, Комаров Володимир Олександрович, Васюхина Валентина Олексіївна, Жованик Борис Євгенович, Слободенюк Сергій Йосипович, Сендецький Микола Миколайович, Бондарчук Сергій Вікторович, Куровська Тетяна Юріївна, Гордієвський Олексій Тихонович, Яйчук Микола Семенович, Лапицький Сергій Володимирович, Василенко Олександр Васильович, Чучмій Андрій Володимирович
МПК: H04B 7/185, B64C 31/00
Мітки: повітряної, розвідки, літального, допомогою, безпілотного, спосіб, апарата, ведення
Формула / Реферат:
Спосіб ведення повітряної розвідки за допомогою безпілотного літального апарата, при якому підготовляють безпілотний літальний апарат, що містить вбудоване навігаційне устаткування та систему GPS, підготовляють розвідувальне устаткування і розгортають пункт прийому розвідувальної інформації, встановлюють розвідувальне устаткування на безпілотний літальний апарат, проводять зліт безпілотного літального апарата із установленим на ньому...
Попередній патент: Спосіб преперитонеальної алопластики малих та середніх пупкових гриж
Наступний патент: Лічильник гальмівного шляху
Випадковий патент: Пристрій для зберігання плодоовочевої продукції у модифікованому газовому середовищі