Гіроскопічний датчик
Формула / Реферат
Гіроскопічний датчик крену ракети, який має зовнішню та внутрішню рамки підвісу, аретир, при цьому зовнішня рамка з'єднана з кулачком, що містить паз, а аретир містить шток, виконаний з можливістю фіксації зовнішньої та внутрішньої рамки, шляхом входження штока аретира у паз кулачка, який відрізняється тим, що шток та паз виконані таким чином, що кут фіксації осі обертання ротора по відношенню до внутрішньої осі підвісу вибраний з міркувань наближення до нуля за рахунок прецесії ротора гіроскопа під дією моменту тертя навколо зовнішньої осі підвісу при обертанні ракети навколо зазначеної осі підвісу за час, що дорівнює половині часу роботи датчика, який, у свою чергу, дорівнює максимально можливому часу польоту ракети.
Текст
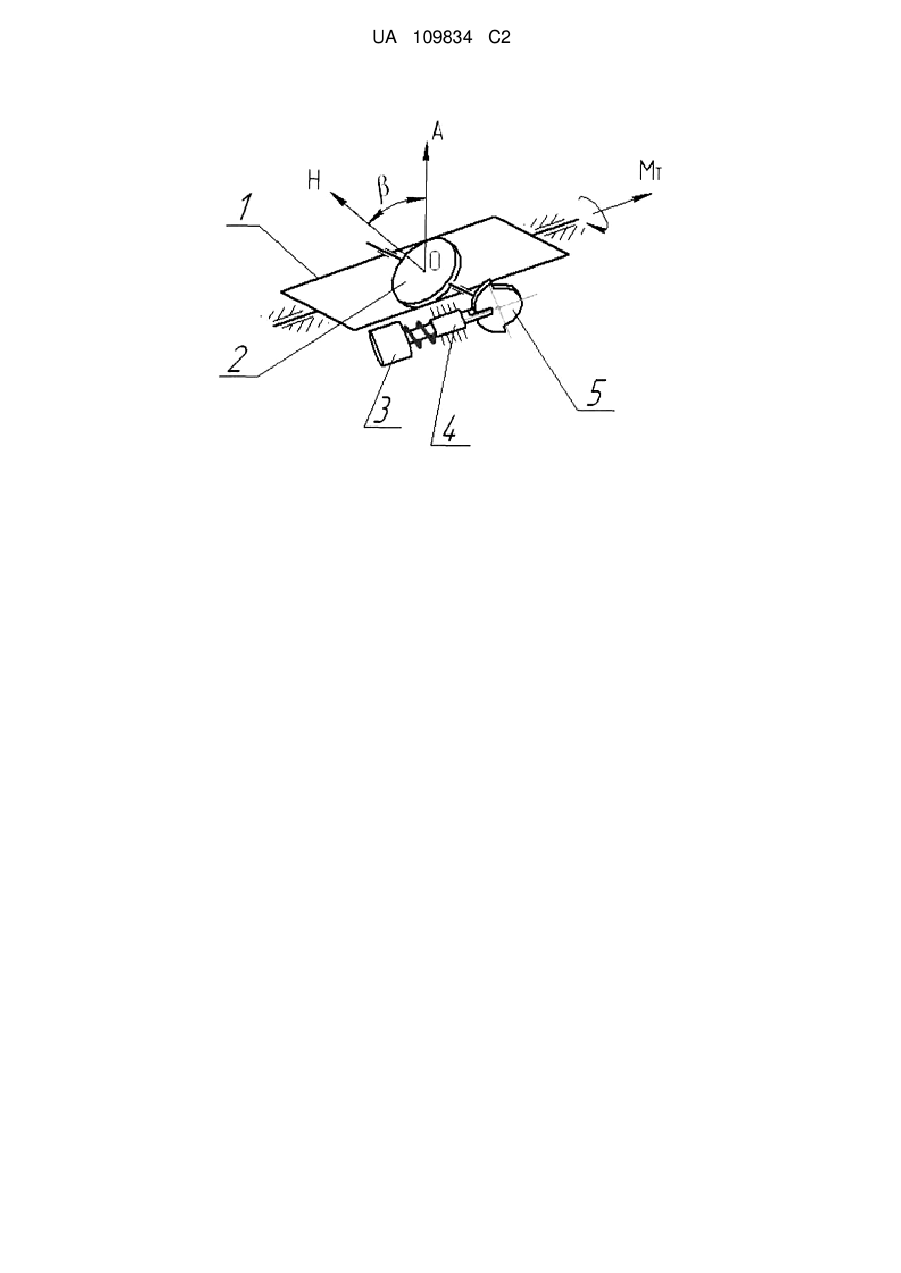
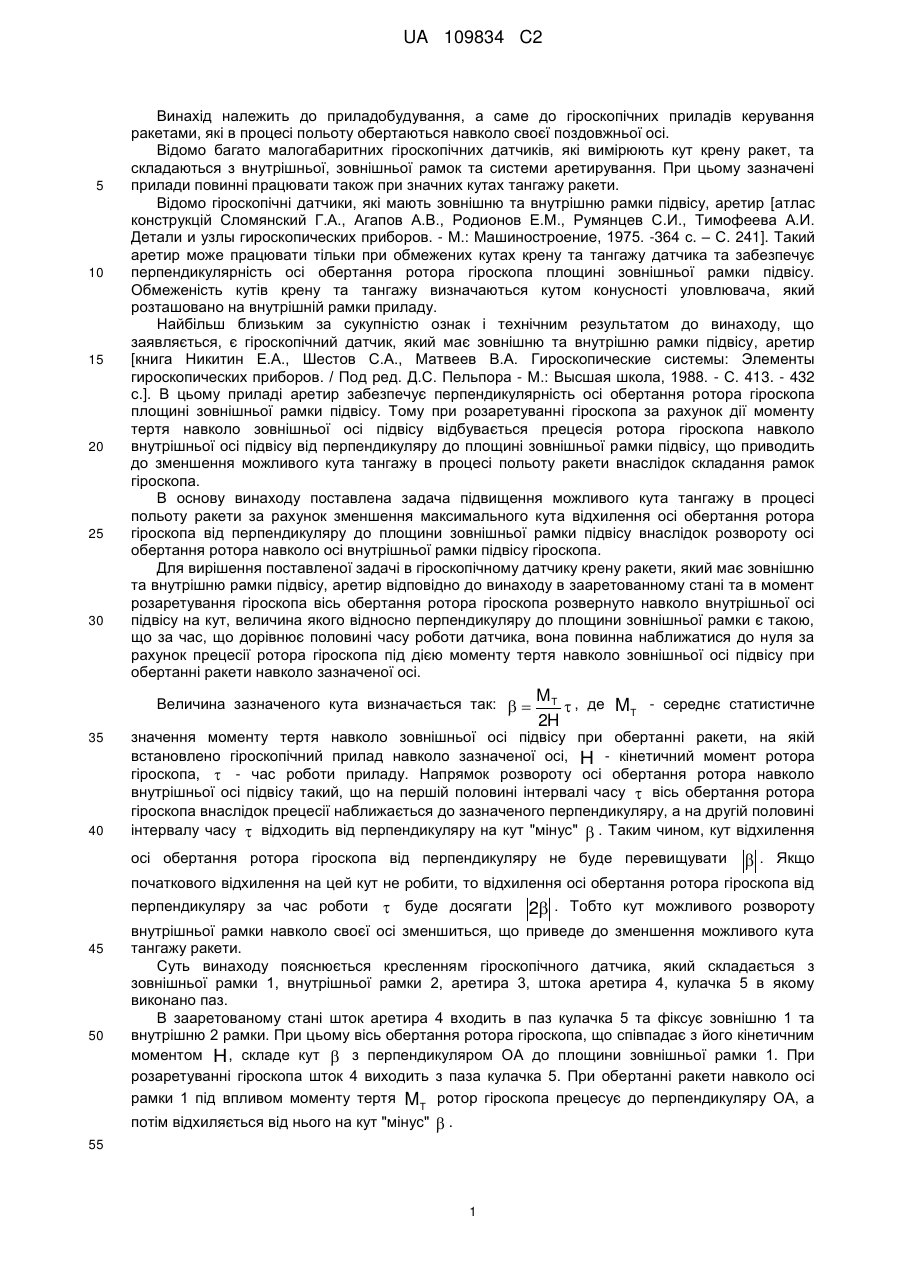
Реферат: Винахід належить до приладобудування, а саме до гіроскопічних приладів керування ракетами, які в процесі польоту обертаються навколо своєї поздовжньої осі. Гіроскопічний датчик крену ракети має аретир, зовнішню та внутрішню рамки підвісу, в якому в зааретованому стані та в момент розаретування гіроскопа вісь обертання ротора гіроскопа розвернуто навколо внутрішньої осі підвісу на кут, величина якого відносно перпендикуляру до площини зовнішньої рамки є такою, що за час, що дорівнює половині часу роботи датчика, вона повинна наближатися до нуля за рахунок прецесії ротора гіроскопа під дією моменту тертя навколо зовнішньої осі підвісу при обертанні ракети навколо зазначеної осі. Технічним результатом винаходу є підвищення можливого кута тангажу в процесі польоту ракети за рахунок зменшення максимального кута відхилення осі обертання ротора гіроскопа від перпендикуляру до площині зовнішньої рамки підвісу внаслідок розвороту осі обертання ротора навколо осі внутрішньої рамки підвісу гіроскопа. UA 109834 C2 (12) UA 109834 C2 UA 109834 C2 5 10 15 20 25 30 Винахід належить до приладобудування, а саме до гіроскопічних приладів керування ракетами, які в процесі польоту обертаються навколо своєї поздовжньої осі. Відомо багато малогабаритних гіроскопічних датчиків, які вимірюють кут крену ракет, та складаються з внутрішньої, зовнішньої рамок та системи аретирування. При цьому зазначені прилади повинні працювати також при значних кутах тангажу ракети. Відомо гіроскопічні датчики, які мають зовнішню та внутрішню рамки підвісу, аретир [атлас конструкцій Сломянский Г.А., Агапов А.В., Родионов Е.М., Румянцев С.И., Тимофеева А.И. Детали и узлы гироскопических приборов. - М.: Машиностроение, 1975. -364 с. – С. 241]. Такий аретир може працювати тільки при обмежених кутах крену та тангажу датчика та забезпечує перпендикулярність осі обертання ротора гіроскопа площині зовнішньої рамки підвісу. Обмеженість кутів крену та тангажу визначаються кутом конусності уловлювача, який розташовано на внутрішній рамки приладу. Найбільш близьким за сукупністю ознак і технічним результатом до винаходу, що заявляється, є гіроскопічний датчик, який має зовнішню та внутрішню рамки підвісу, аретир [книга Никитин Е.А., Шестов С.А., Матвеев В.А. Гироскопические системы: Элементы гироскопических приборов. / Под ред. Д.С. Пельпора - М.: Высшая школа, 1988. - С. 413. - 432 с.]. В цьому приладі аретир забезпечує перпендикулярність осі обертання ротора гіроскопа площині зовнішньої рамки підвісу. Тому при розаретуванні гіроскопа за рахунок дії моменту тертя навколо зовнішньої осі підвісу відбувається прецесія ротора гіроскопа навколо внутрішньої осі підвісу від перпендикуляру до площині зовнішньої рамки підвісу, що приводить до зменшення можливого кута тангажу в процесі польоту ракети внаслідок складання рамок гіроскопа. В основу винаходу поставлена задача підвищення можливого кута тангажу в процесі польоту ракети за рахунок зменшення максимального кута відхилення осі обертання ротора гіроскопа від перпендикуляру до площини зовнішньої рамки підвісу внаслідок розвороту осі обертання ротора навколо осі внутрішньої рамки підвісу гіроскопа. Для вирішення поставленої задачі в гіроскопічному датчику крену ракети, який має зовнішню та внутрішню рамки підвісу, аретир відповідно до винаходу в зааретованному стані та в момент розаретування гіроскопа вісь обертання ротора гіроскопа розвернуто навколо внутрішньої осі підвісу на кут, величина якого відносно перпендикуляру до площини зовнішньої рамки є такою, що за час, що дорівнює половині часу роботи датчика, вона повинна наближатися до нуля за рахунок прецесії ротора гіроскопа під дією моменту тертя навколо зовнішньої осі підвісу при обертанні ракети навколо зазначеної осі. Величина зазначеного кута визначається так: 35 40 MТ , де MТ - середнє статистичне 2H значення моменту тертя навколо зовнішньої осі підвісу при обертанні ракети, на якій встановлено гіроскопічний прилад навколо зазначеної осі, H - кінетичний момент ротора гіроскопа, - час роботи приладу. Напрямок розвороту осі обертання ротора навколо внутрішньої осі підвісу такий, що на першій половині інтервалі часу вісь обертання ротора гіроскопа внаслідок прецесії наближається до зазначеного перпендикуляру, а на другій половині інтервалу часу відходить від перпендикуляру на кут "мінус" . Таким чином, кут відхилення осі обертання ротора гіроскопа від перпендикуляру не буде перевищувати . Якщо початкового відхилення на цей кут не робити, то відхилення осі обертання ротора гіроскопа від перпендикуляру за час роботи буде досягати 45 50 2 . Тобто кут можливого розвороту внутрішньої рамки навколо своєї осі зменшиться, що приведе до зменшення можливого кута тангажу ракети. Суть винаходу пояснюється кресленням гіроскопічного датчика, який складається з зовнішньої рамки 1, внутрішньої рамки 2, аретира 3, штока аретира 4, кулачка 5 в якому виконано паз. В зааретованому стані шток аретира 4 входить в паз кулачка 5 та фіксує зовнішню 1 та внутрішню 2 рамки. При цьому вісь обертання ротора гіроскопа, що співпадає з його кінетичним моментом H , складе кут з перпендикуляром ОА до площини зовнішньої рамки 1. При розаретуванні гіроскопа шток 4 виходить з паза кулачка 5. При обертанні ракети навколо осі рамки 1 під впливом моменту тертя MТ ротор гіроскопа прецесує до перпендикуляру ОА, а потім відхиляється від нього на кут "мінус" . 55 1 UA 109834 C2 ФОРМУЛА ВИНАХОДУ 5 10 Гіроскопічний датчик крену ракети, який має зовнішню та внутрішню рамки підвісу, аретир, при цьому зовнішня рамка з'єднана з кулачком, що містить паз, а аретир містить шток, виконаний з можливістю фіксації зовнішньої та внутрішньої рамки, шляхом входження штока аретира у паз кулачка, який відрізняється тим, що шток та паз виконані таким чином, що кут фіксації осі обертання ротора по відношенню до внутрішньої осі підвісу вибраний з міркувань наближення до нуля за рахунок прецесії ротора гіроскопа під дією моменту тертя навколо зовнішньої осі підвісу при обертанні ракети навколо зазначеної осі підвісу за час, що дорівнює половині часу роботи датчика, який, у свою чергу, дорівнює максимально можливому часу польоту ракети. Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Автори англійськоюYankelevych Hryhorii Yevsiiovych
Автори російськоюЯнкелевич Григорий Евсеевич
МПК / Мітки
МПК: G01C 19/46, G01C 19/04, G01C 19/26, G01C 19/50
Мітки: датчик, гіроскопічний
Код посилання
<a href="https://ua.patents.su/4-109834-giroskopichnijj-datchik.html" target="_blank" rel="follow" title="База патентів України">Гіроскопічний датчик</a>
Гіроскопічний пристрій для азимутального орієнтування напрямків
Номер патенту: 83608
Опубліковано: 25.07.2008
Автори: Ліхоткін Олександр Михайлович, Юр'єв Юрій Юрійович, Горєлов Євгеній Михайлович, Машиністов Едуард Сергійович, Пригода Надія Вячеславівна
МПК: G01C 19/00
Мітки: орієнтування, пристрій, гіроскопічний, напрямків, азимутального
Формула / Реферат:
1. Гіроскопічний пристрій для азимутального орієнтування напрямків, що являє собою гіроблок, в якому на торсіонному підвісі закріплений маятниковий чутливий елемент, що містить гіромотор з горизонтальною віссю власного обертання, відлікове дзеркало, маломоментний контактний пристрій та аретир, який відрізняється тим, що має контрольний елемент, азимут якого визначається, виконаний у вигляді двобічного плоского дзеркала,...
Двороторний інтегруючий гіроскопічний гравіметр з контрольованими параметрами

Номер патенту: 88473
Опубліковано: 26.10.2009
Автори: Безвесільна Олена Миколаївна, Добржанський Олександр Олексійович
МПК: G01C 19/00, G01V 7/00
Мітки: гіроскопічний, двороторний, інтегруючий, параметрами, контрольованими, гравіметр
Формула / Реферат:
Двороторний інтегруючий гіроскопічний гравіметр з контрольованими параметрами, що містить гіроскопічний датчик (1) гравітаційного прискорення, систему (2) визначення поточних навігаційних параметрів та вимірювач (3) поточної висоти, виходи яких підключені до бортової цифрової обчислювальної машини (БЦОМ) (4), який відрізняється тим, що гіроскопічний датчик (1) гравітаційного прискорення містить однакові перший гіромотор (5) та другий...
Датчик кутового положення і лінійної швидкості
Номер патенту: 34944
Опубліковано: 26.08.2008
Автори: Симонов Володимир Федорович, Субота Анатолій Максимович, Кулік Анатолій Степанович
МПК: G01P 3/00
Мітки: положення, швидкості, кутового, датчик, лінійної
Формула / Реферат:
Датчик кутового положення і лінійної швидкості, що містить гіроскоп, внутрішню і зовнішню рами, перетворювачі кутового положення рам, який відрізняється тим, що на зовнішній стороні внутрішньої рами симетрично на протилежних її сторонах відносно осі підвісу установлені дві сейсмічні маси у пружних підвісах, центри мас котрих лежать на осі підвісу зовнішньої рами, а осі підвісусейсмічних мас розташовані паралельно осі підвісу внутрішньої рами,...
Гіроскопічний компас

Номер патенту: 17732
Опубліковано: 16.10.2006
Автори: Гордін Олександр Григорович, Ревенко Світлана Анатоліївна
МПК: G01C 19/00
Мітки: компас, гіроскопічний
Формула / Реферат:
1. Гіроскопічний компас, що містить гіросферу, всередині якої встановлено два гіроблоки зі взаємно ортогональними векторами кінетичних моментів, осі роторів яких є горизонтальними, а осі їх кожухів розміщені вертикально, причому гіроблоки можуть обертатися відносно гіросфери та зв'язані між собою за допомогою антипаралелограма, середня ланка якого зв'язана з внутрішньою поверхнею гіросфери за допомогою двох пружних елементів, який...
Датчик кутової швидкості на базі динамічно налагоджуваного гіроскопу з оптичним датчиком кута
Номер патенту: 71782
Опубліковано: 25.07.2012
Автори: Аврутов Вадим Вікторович, Симоненко Владислав Миколайович
МПК: G01C 19/38
Мітки: датчиком, гіроскопу, базі, датчик, швидкості, динамічної, кутової, оптичним, налагоджуваного, кута
Формула / Реферат:
Датчик кутової швидкості, який використовується в інерціальних навігаційних системах, що містить динамічно налаштовуваний гіроскоп, який відрізняється тим, що знімання інформації про кути повороту ротора навкруг осей торсіонів здійснюється за допомогою оптичного, а не ємнісного датчика кута.
Попередній патент: Спосіб розробки порід розкриття в залізорудних кар’єрах
Наступний патент: Пристрій для обробляння пластичних матеріалів
Випадковий патент: Суміш адсорбуюча "атоксіл вп"