Двороторний інтегруючий гіроскопічний гравіметр з контрольованими параметрами
Номер патенту: 88473
Опубліковано: 26.10.2009
Автори: Безвесільна Олена Миколаївна, Добржанський Олександр Олексійович


Формула / Реферат
Двороторний інтегруючий гіроскопічний гравіметр з контрольованими параметрами, що містить гіроскопічний датчик (1) гравітаційного прискорення, систему (2) визначення поточних навігаційних параметрів та вимірювач (3) поточної висоти, виходи яких підключені до бортової цифрової обчислювальної машини (БЦОМ) (4), який відрізняється тим, що гіроскопічний датчик (1) гравітаційного прискорення містить однакові перший гіромотор (5) та другий гіромотор (6), ротори яких мають рівні за модулем, але протилежні за знаком частоти обертання, і встановлені в зовнішній рамці (7) з можливістю обертання першого гіромотора (5) навколо осі (10) внутрішнього підвісу першого гіромотора та другого гіромотора (6) навколо осі (11) внутрішнього підвісу другого гіромотора в протилежних напрямках на рівні кути за допомогою електромеханічного сельсинного зв'язку, причому вісь (10) внутрішнього підвісу першого гіромотора та вісь (11) внутрішнього підвісу другого гіромотора зміщені по різні боки на однакову відстань відносно площини зовнішньої рамки (7), а центр мас першого гіромотора (5) розташований на осі (12) обертання ротора першого гіромотора і центр мас другого гіромотора (6) розташований на осі (13) обертання ротора другого гіромотора так, що, якщо вісь (12) обертання ротора першого гіромотора та вісь (13) обертання ротора другого гіромотора перпендикулярні до площини зовнішньої рамки (7), то центр мас першого гіромотора (5) та центр мас другого гіромотора (6) розміщені на осі (17) підвісу зовнішньої рамки, яка встановлена вздовж вертикалі місця, причому на осі (10) внутрішнього підвісу першого гіромотора розташований перший датчик (14) кута повороту, вихід якого підключений до підсилюючого елемента (15), вихід якого підключений до датчика (16) моменту, який встановлений на осі (17) підвісу зовнішньої рамки разом з другим датчиком (18) кута повороту, вихід якого підключений до БЦОМ (4), а на осі (11) внутрішнього підвісу другого гіромотора встановлений третій датчик (22) кута повороту, вихід якого підключений до БЦОМ (4), причому перший гіромотор (5) та другий гіромотор (6) підключені до блока (19) живлення стабілізованої частоти, причому на осі (12) обертання ротора першого гіромотора встановлений перший датчик (20) частоти обертання, вихід якого підключений до БЦОМ (4), а на осі (13) обертання ротора другого гіромотора встановлений другий датчик (21) частоти обертання, вихід якого підключений до БЦОМ (4).
Текст
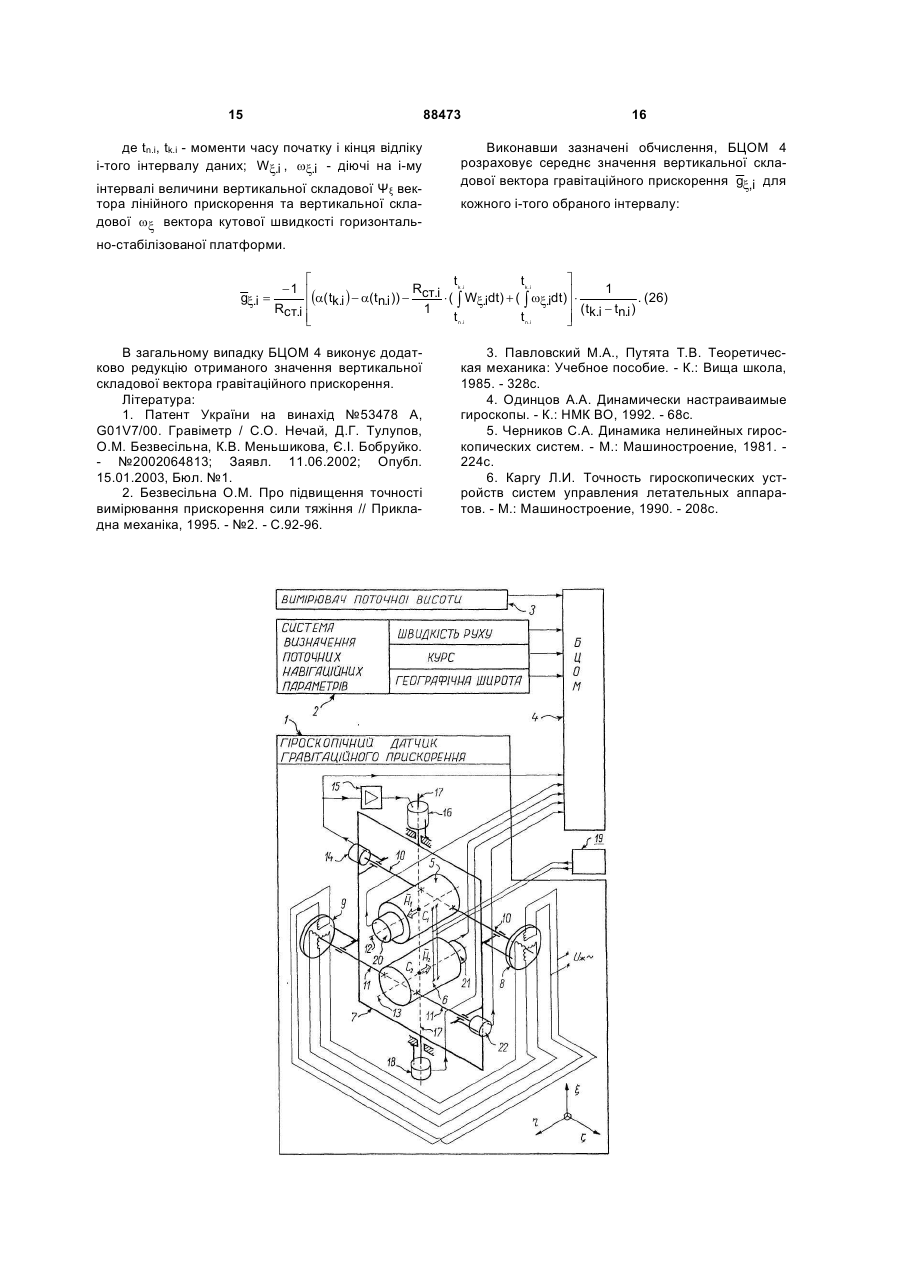
Двороторний інтегруючий гіроскопічний гравіметр з контрольованими параметрами, що містить гіроскопічний датчик (1) гравітаційного прискорення, систему (2) визначення поточних навігаційних параметрів та вимірювач (3) поточної висоти, виходи яких підключені до бортової цифрової обчислювальної машини (БЦОМ) (4), який відрізняється тим, що гіроскопічний датчик (1) гравітаційного прискорення містить однакові перший гіромотор (5) та другий гіромотор (6), ротори яких мають рівні за модулем, але протилежні за знаком частоти обертання, і встановлені в зовнішній рамці (7) з можливістю обертання першого гіромотора (5) навколо осі (10) внутрішнього підвісу першого гіромотора та другого гіромотора (6) навколо осі (11) внутрішнього підвісу другого гіромотора в про C2 2 UA 1 3 Гравіметр-прототип, як і об'єкт, що заявляється, містить гіроскопічний датчик гравітаційного прискорення, систему визначення поточних навігаційних параметрів та вимірювач поточної висоти, виходи яких підключені до бортової цифрової обчислювальної машини (БЦОМ). Проте, на відміну від пристрою-винаходу, в гравіметрі-прототипі в якості гіроскопічного датчика гравітаційного прискорення застосований один двостепеневий гіроскоп. Центр мас ротора зміщений в площині обертання ротора, створюючи маятниковість, а сам ротор кріпиться на осі підвісу за допомогою пружних торсионів, що працюють, в основному, на скручення. В початковому положенні ротор обертається в площині перпендикулярній до вертикалі місця (нормалі до еліпсоїда обертання). Під час роботи гравіметра-прототипу відхилення ротора від його початкового положення вимірюється датчиком кута, вихід якого є вихідним сигналом гіроскопічного датчика гравітаційного прискорення і вхідним сигналом для датчика моменту, який створює додатковий момент відносно осі підвісу ротора. Зазначені особливості конструкції зумовлюють те, що при обранні певного значення швидкості обертання приводного двигуна ротора момент сил пружного опору торсионів відносно осі підвісу ротора компенсується моментом відцентрових сил інерції ротора відносно тієї ж осі, що виникає внаслідок обертання ротора від приводного двигуна. Тому, в ідеалі, в гравіметрі-прототипі статичний передавальний коефіцієнт гіроскопічного датчика гравітаційного прискорення залежить тільки від маятниковості та від передавального коефіцієнта датчика моменту. Але на практиці в гравіметріпрототипі стабільність статичного передавального коефіцієнта гіроскопічного датчика гравітаційного прискорення обмежена через сильну залежність пружних властивостей торсионів від температури та параметрів вібрацій в місці установки приладу, які спричиняють втомлюваність пружного елементу. Температурні зміни спричиняють також зміну електричних параметрів в електромеханічній системі датчика моменту і, таким чином, впливають на значення його передавального коефіцієнта. Нестабільність передавального коефіцієнта датчика моменту спричиняє додаткову нестабільність статичного передавального коефіцієнта гіроскопічного датчика гравітаційного прискорення. В процесі роботи гравіметра-прототипу відносно осі підвісу ротора одночасно діють «корисний» момент від вертикальної складової вектора гравітаційного прискорення, моменти-перешкоди від горизонтальних складових вектора гравітаційного прискорення, моменти-перешкоди від вертикальної та горизонтальних складових вектора лінійного прискорення рухомої основи, моменти-перешкоди від вертикальної та горизонтальних складових вектора кутової швидкості рухомої основи та моменти-перешкоди від горизонтальних складових вектора кутового прискорення рухомої основи. Вказані моменти викликають появу відповідних складових у вихідному сигналі гіроскопічного датчика гравітаційного прискорення. Моментиперешкоди, окрім тих, що спричинені горизонталь 88473 4 ними складовими вектора гравітаційного прискорення, обумовлені тим, що гіроскопічний датчик гравітаційного прискорення встановлений на рухомій основі. Отже, суттєві недоліки гравіметра-прототипу це: 1) нестабільність статичного передавального коефіцієнта гіроскопічного датчика гравітаційного прискорення, спричинена змінами пружних властивостей торсионів та змінами електричних параметрів в електромеханічній системі датчика моменту; 2) неможливість визначення поточного статичного передавального коефіцієнта гіроскопічного датчика гравітаційного прискорення; 3) наявність у вихідному сигналі гіроскопічного датчика гравітаційного прискорення складовихперешкод, обумовлених тим, що гіроскопічний датчик гравітаційного прискорення встановлений на рухомій основі, а також складових-перешкод від горизонтальних складових вектора гравітаційного прискорення. Зазначені фактори суттєво знижують точність вимірювання вертикальної складової вектора гравітаційного прискорення даним приладом з борту рухомого апарату. В основу винаходу поставлено задачу в двороторному інтегруючому гіроскопічному гравіметрі з контрольованими параметрами шляхом застосування в якості датчика гравітаційного прискорення - двороторного інтегруючого гіроскопічного датчика гравітаційного прискорення та додаткових інформаційних каналів забезпечити: 1) підвищення стабільності статичного передавального коефіцієнта гіроскопічного датчика гравітаційного прискорення, 2) можливість визначення поточного статичного передавального коефіцієнта гіроскопічного датчика гравітаційного прискорення, 3) зниження рівня перешкод у вихідному сигналі гіроскопічного датчика гравітаційного прискорення, що у сукупності призводить до суттєвого підвищення точності вимірювань вертикальної складової вектора гравітаційного прискорення з борту рухомого апарату. Поставлена задача вирішується тим, що у гравіметр, що містить гіроскопічний датчик гравітаційного прискорення, систему визначення поточних навігаційних параметрів та вимірювач поточної висоти, виходи яких підключені до БЦОМ, введені нові суттєві ознаки. Згідно з винаходом, гіроскопічний датчик гравітаційного прискорення містить однакові перший гіромотор та другий гіромотор, ротори яких мають рівні за модулем, але протилежні за знаком частоти обертання, і встановлені в зовнішній рамці з можливістю обертання першого гіромотора навколо осі внутрішнього підвісу першого гіромотора та другого гіромотора навколо осі внутрішнього підвісу другого гіромотора в протилежних напрямках на рівні кути за допомогою електромеханічного сельсинного зв'язку, причому вісь внутрішнього підвісу першого гіромотора та вісь внутрішнього підвісу другого гіромотора зміщені по різні боки на однакову відстань відносно площини 5 зовнішньої рамки, а центр мас першого гіромотора розташований на осі обертання ротора першого гіромотора і центр мас другого гіромотора розташований на осі обертання ротора другого гіромотора так, що, якщо вісь обертання ротора першого гіромотора та вісь обертання ротора другого гіромотора перпендикулярні до площини зовнішньої рамки, то центр мас першого гіромотора та центр мас другого гіромотора розміщені на осі підвісу зовнішньої рамки, яка встановлена вздовж вертикалі місця, причому на осі внутрішнього підвісу першого гіромотора розташований перший датчик кута повороту, вихід якого підключений до підсилюючого елементу, вихід якого підключений до датчика моменту, який встановлений на осі підвісу зовнішньої рамки разом з другим датчиком кута повороту, вихід якого підключений до БЦОМ, а на осі внутрішнього підвісу другого гіромотора встановлений третій датчик кута повороту, вихід якого підключений до БЦОМ, причому перший гіромотор та другий гіромотор підключені до блоку живлення стабілізованої частоти, причому на осі обертання ротора першого гіромотора встановлений перший датчик частоти обертання, вихід якого підключений до БЦОМ, а на осі обертання ротора другого гіромотора встановлений другий датчик частоти обертання, вихід якого підключений до БЦОМ. Запропоноване використання в якості гіроскопічного датчика гравітаційного прискорення - двороторного інтегруючого гіроскопічного датчика гравітаційного прискорення дозволяє підвищити стабільність статичного передавального коефіцієнта вказаного датчика за рахунок того, що в цьому випадку статичний передавальний коефіцієнт визначається лише значеннями маятниковостей, осевими моментами інерції та частотами обертання роторів першого та другого гіромоторів. Оскільки значення маятниковості та осевих моментів інерції роторів першого та другого гіромоторів можливо застабілізувати лише підбором матеріалів з малим температурним розширенням, а стабільність значення частоти обертання роторів першого та другого гіромоторів забезпечити за рахунок використання якісних прецизійних синхронних першого та другого гіромоторів у сукупності з блоком живлення стабілізованої частоти, то забезпечується отримання стабільного статичного передавального коефіцієнта гіроскопічного датчика гравітаційного прискорення. Це є значною перевагою, оскільки стабільність даного коефіцієнта є одним з головних факторів, що визначають вихідну точність двороторного інтегруючого гіроскопічного гравіметра з контрольованими параметрами, а, отже, і точність вимірювань вертикальної складової вектора гравітаційного прискорення з борту рухомого апарату за допомогою даного приладу. Система підключених до БЦОМ першого датчика частоти обертання, який контролює частоту обертання ротора першого гіромотора, та другого датчика частоти обертання, який контролює частоту обертання ротора другого гіромотора, створює додатковий інформаційний канал і дозволяє, особливо у випадку неможливості забезпечити довготривалу стабільність частоти обертання роторів першого та другого гіромоторів, програмними 88473 6 засобами обирати із всієї сукупності вимірювань інтервали з необхідною, для заданої точності, стабільністю частоти обертання роторів першого та другого гіромоторів і визначати для кожного такого інтервалу поточне значення статичного передавального коефіцієнта гіроскопічного датчика гравітаційного прискорення у відповідності до поточних, для таких інтервалів, значень частот обертання роторів першого та другого гіромоторів. Вихідний сигнал гіроскопічного датчика гравітаційного прискорення містить складовіперешкоди, обумовлені тим, що гіроскопічний датчик гравітаційного прискорення встановлений на рухомій основі. За даними від системи визначення поточних навігаційних параметрів визначають низькочастотні складові-перешкоди, а потім в БЦОМ програмно віднімають їх від вихідного сигналу гіроскопічного датчика гравітаційного прискорення. Наявність високочастотних складових-перешкод зумовлює необхідність усереднення вихідного сигналу гіроскопічного датчика гравітаційного прискорення, що передбачає застосування процедури інтегрування. Запропонований двороторний інтегруючий гіроскопічний датчик гравітаційного прискорення має в цьому сенсі значну перевагу, оскільки з точки зору прецесійної теорії [3] є ідеальним інтегратором. В даному випадку зникає необхідність проведення процедури дискретного інтегрування сигналу програмними засобами в БЦОМ, а, отже, відсутня і похибка дискретного інтегрування, що підвищує точність вимірювання вертикальної складової вектора гравітаційного прискорення з борту рухомого апарату. Застосування системи двох пов'язаних сельсинів, які дозволяють обертатися першому промотору навколо осі внутрішнього підвісу першого гіромотора та другому гіромотору навколо осі підвісу другого гіромотора лише в протилежних напрямках на рівні кути, обумовлює те, що між першим та другим гіромоторами створюється зв'язок аналогічний кінематичному зв'язку з одиничним за модулем і від'ємним за знаком передавальним коефіцієнтом. Саме таке рішення дозволяє уникнути появи додаткових моментів тертя, які б обов'язково з'явились, якщо б застосовувався виключно механічний зв'язок, і викликали б появу додаткових складових-перешкод у вихідному сигналі гіроскопічного датчика гравітаційного прискорення. При цьому з урахуванням однаковості першого та другого гіромоторів створюються умови для взаємної компенсації моментів-перешкод від горизонтальних складових вектора кутового прискорення рухомої основи. Крім того, описаний вище зв'язок між однаковими першим та другим гіромоторами у сукупності з розміщенням центрів мас першого та другого промоторів, а також розміщенням осей внутрішніх підвісів першого та другого гіромоторів зумовлює те, що утворюються маятниковості першого та другого гіромоторів рівні за модулем, але протилежні за знаком, і, таким чином, створюються умови для взаємної компенсації моментів-перешкод від горизонтальних складових вектора лінійного прискорення рухомої основи, в тому числі від горизонтальних складових вектора гравітаційного прискорення, а також, оскі 7 льки частоти обертання роторів першого та другого гіромоторів рівні за модулем та протилежні за знаком, створюються умови для взаємної компенсації моментів-перешкод від горизонтальних складових вектора кутової швидкості рухомої основи. Точність взаємної компенсації вищезазначених моментів-перешкод залежить від рівності модулів і протилежності знаків маятниковостей двох однакових першого та другого гіромоторів та від рівності модулів і протилежності знаків кутів повороту першого та другого гіромоторів навколо осей внутрішніх підвісів першого та другого гіромоторів. Перша умова забезпечується точністю виготовлення конструктивних елементів, друга - залежить від точності роботи системи двох пов'язаних сельсинів. Система двох пов'язаних сельсинів працює в динамічному режимі, тому впровадження ще одного додаткового інформаційного каналу, який дозволив би контролювати кути повороту першого та другого гіромоторів навколо осей внутрішніх підвісів першого та другого гіромоторів, створює можливість для БЦОМ програмно обирати із всієї сукупності вимірювань інтервали, на яких вищезазначена друга умова виконується з потрібною точністю. Конструктивно такий інформаційний канал забезпечується підключеними до БЦОМ першим датчиком кута повороту, який контролює кут повороту першого гіромотора навколо осі внутрішнього підвісу першого гіромотора, та другим датчиком кута повороту, який контролює кут повороту другого гіромотора навколо осі внутрішнього підвісу другого гіромотора. Отже, в даному випадку створюються умови для вилучення тих результатів вимірювання, під час отримання яких компенсація моментів-перешкод виконана недостатньо якісно. Отже, взаємна компенсація вищезазначених моментів-перешкод та контроль за електромеханічною системою, що забезпечує таку компенсацію, веде до того, що у вихідному сигналі гіроскопічного датчика гравітаційного прискорення відсутні складові, пропорційні даним моментамперешкодам, що підвищує точність вимірювання вертикальної складової вектора гравітаційного прискорення з борту рухомого апарату. Розташування першого та другого промоторів, а також розташування осей внутрішніх підвісів першого та другого промоторів так, що центри мас першого та другого гіромоторів підтримуються максимально близько до осі підвісу зовнішньої рамки, дозволяє звільнитись від складовихперешкод у вихідному сигналі гравіметра, спричинених відцентровими прискореннями, що діють на центри мас першого та другого гіромоторів під час обертання зовнішньої рамки разом з першим та другим промоторами навколо осі підвісу зовнішньої рамки. Якщо б вказані центри мас знаходились на певній відстані від осі обертання зовнішньої рамки, то з'явились би відцентрові прискорення прямо пропорційні цій відстані і квадрату кутової швидкості обертання зовнішньої рамки навколо осі підвісу зовнішньої рамки. Звільнення від описаних складових-перешкод у вихідному сигналі гіроскопічного датчика гравітаційного прискорення підвищує точність вимірювання вертика 88473 8 льної складової вектора гравітаційного прискорення з борту рухомого апарату. Для запропонованого варіанту конструкції внутрішніх підвісів першого та другого гіромоторів, коли створені протилежні маятниковості, за правилом Резаля [3] кінетичні моменти першого та другого гіромоторів повинні мати протилежні знаки для того, щоб моменти від дії вертикальної складової вектора гравітаційного прискорення на центри мас першого та другого гіромоторів викликали однаково направлений прецесійний рух зовнішньої рамки навколо осі підвісу зовнішньої рамки. Передбачений контур корекції, що складається з першого датчика кута повороту, вихід якого підключений до підсилюючого елемента, вихід якого підключений до датчика моменту, встановленого на осі підвісу зовнішньої рамки, дозволяє забезпечити мінімальність кутів відхилення осей обертання роторів першого та другого гіромоторів від перпендикулярності до площини зовнішньої рамки і, отже, від перпендикулярності до осі підвісу зовнішньої рамки. Оскільки осі підвісу зовнішньої рамки надане положення вздовж вертикалі місця (нормалі до еліпсоїда обертання), моменти, створені дією вертикальної складової вектора гравітаційного прискорення на центри мас першого та другого гіромоторів, будуть мати стабільно максимальне значення, при стабільності положення осей обертання роторів першого та другого гіромоторів. Таким чином, забезпечується стабільність «нульпункту» і максимальна чутливість запропонованого гіроскопічного датчика гравітаційного прискорення, що є стандартною вимогою до приладів такого типу [4]. Суть винаходу пояснюється кресленням. На кресленні зображено структуру двороторного інтегруючого гіроскопічного гравіметра з контрольованими параметрами. Гравіметр містить гіроскопічний датчик 1 гравітаційного прискорення, систему 2 визначення поточних навігаційних параметрів (швидкості руху, курсу та географічної широти розташування рухомої основи) та вимірювач 3 поточної висоти, виходи яких підключені до БЦОМ 4. Гіроскопічний датчик 1 гравітаційного прискорення містить однакові перший гіромотор 5 та другий гіромотор 6, встановлені в зовнішній рамці 7 з можливістю обертання першого гіромотора 5 навколо осі 10 внутрішнього підвісу першого гіромотора та другого гіромотора 6 навколо осі 11 внутрішнього підвісу другого гіромотора в протилежних напрямках на рівні кути за допомогою електромеханічного сельсинного зв'язку. Сельсини 8 та 9 електрично поєднані в протифазі, що дозволяє створити еквівалент механічного зв'язку з від'ємним одиничним кінематичним передавальним коефіцієнтом. Вісь 10 внутрішнього підвісу першого гіромотора та вісь 11 внутрішнього підвісу другого гіромотора зміщені по різні боки на однакову відстань відносно площини зовнішньої рамки 7, а центр мас першого гіромотора 5 розташований на осі 12 обертання ротора першого гіромотора і центр мас другого гіромотора 6 розташований на осі 13 обе 9 88473 ртання ротора другого гіромотора так, що, якщо вісь 12 обертання ротора першого гіромотора та вісь 13 обертання ротора другого гіромотора перпендикулярні до площини зовнішньої рамки 7, то центр мас першого гіромотора 5 та центр мас другого гіромотора 6 розміщені на осі 17 підвісу зовнішньої рамки, яка встановлена вздовж вертикалі місця. Встановлення осі 17 підвісу зовнішньої рамки вздовж вертикалі місця реалізується, наприклад, монтажем гіроскопічного датчика 1 гравітаційного прискорення на горизонтально-стабілізовану платформу, причому вісь 17 підвісу зовнішньої рамки встановлюється вздовж вертикальної осі x горизонтально-стабілізованої платформи, а осі h, ς - горизонтальні осі цієї платформи. На осі 10 внутрішнього підвісу першого гіромотора розташований перший датчик 14 кута повороту, вихід якого підключений до підсилюючого елементу 15, вихід якого підключений до датчика 16 моменту, який встановлений на осі 17 підвісу зовнішньої рамки разом з другим датчиком 18 кута повороту, вихід якого підключений до БЦОМ 4, а на осі 11 внутрішнього підвісу другого гіромотора встановлений третій датчик 22 кута повороту, вихід якого підключений до БЦОМ 4. Вихід другого датчика 18 кута повороту підключений до БЦОМ 4 для можливості обробки сигналу програмними засобами. Вихід першого датчика 14 кута повороту та третього датчика 22 кута повороту підключені до БЦОМ 4 для організації контролю коректності роботи системи двох пов'язаних сельсинів 8 та 9. Перший гіромотор 5 та другий гіромотор 6 підключені до блоку 19 живлення стабілізованої частоти, причому на осі 12 обертання ротора першого гіромотора встановлений перший датчик 20 частоти обертання, вихід якого підключений до БЦОМ 4, а на осі 13 обертання ротора другого гіромотора встановлений другий датчик 21 частоти обертан 10 ня, вихід якого підключений до БЦОМ 4. Вихід першого датчика 20 частоти обертання та вихід другого датчика 21 частоти обертання підключені до БЦОМ 4 для можливості визначення поточного статичного передавального коефіцієнта гіроскопічного датчика 1 гравітаційного прискорення. Гравіметр працює наступним чином. Ротор першого гіромотора 5 обертається з ча& стотою g 1 навколо осі 12 обертання ротора першого гіромотора, створюючи кінетичний момент Н1. Ротор другого гіромотора 6 обертається з час& тотою g 2 навколо осі 13 обертання ротора другого гіромотора, створюючи при цьому кінетичний момент Н2. При цьому виконуються умови: & & g1 =- g 2 , Н1=-Н2. (1) Вертикальна складова gx та горизонтальні складові gh, gV вектора гравітаційного прискорення разом із вертикальною складовою Wx та горизонтальними складовими Wh, WV вектора лінійного прискорення горизонтально-стабілізованої платформи діють на зміщений відносно осі 10 внутрішнього підвісу першого гіромотора центр мас С1 першого гіромотора 5 та зміщений відносно осі 11 внутрішнього підвісу другого гіромотора центр мас С2 другого гіромотора 6. При цьому створюються момент Mg, W10 відносно осі 10 внутрішнього підвісу першого гіромотора та момент Mg,W11 відносно осі 11 внутрішнього підвісу другого гіромотора. Момент Mg, W10 та момент Mg,W11 , якщо використовувати загальні принципи опису динаміки гіроскопічних систем [4], [6], визначаються наступним чином: [( ) ( ) ( ) ] = -m2 × l 2 × [(Wx - gx ) × cos b2 + (Wh - gh )× sina × sinb2 - (WV - gV ) × cos a × sinb2 ] (3) , Mg, W = -m1 × l1 × Wx - gx × cos b1 + Wh - gh × sin a × sinb1 - WV - gV × cos a × sinb1 , ( 2) 10 Mg,W 11 де l1 × m1 - маятниковість першого гіромотора 5; l 2 × m2 - маятниковість другого гіромотора 6; b1 - кут повороту першого гіромотора 5 навколо осі 10 внутрішнього підвісу першого гіромотора; b2 - кут повороту другого гіромотора 6 навколо осі 11 внутрішнього підвісу другого гіромотора; a - кут повороту зовнішньої рамки 7 навколо осі 17 підвісу зовнішньої рамки. При наявності горизонтальних складових & & wV, wh вектора кутового прискорення горизонтально-стабілізованої платформи, де безпосередньо встановлено гіроскопічний датчик 1 гравітаційного прискорення, виникають момент Mk10 сил інерції відносно осі 10 внутрішнього підвісу першого гіромотора та момент Mk 11 сил інерції відносно осі 11 внутрішнього підвісу другого гіромотора, які визначаються наступним чином: ( ( ) ) & & Mін = -B1 × wh × cos a + wV × sin a , ( 4) 10 & & Mін = -B2 × wh × cos a + wV × sin a , (5) 11 де В1 - момент інерції першого гіромотора 5 відносно осі 10 внутрішнього підвісу першого гіромотора; В2 - момент інерції другого гіромотора 6 відносно осі 11 внутрішнього підвісу другого гіромотора. Вертикальна складова wx та горизонтальні складові wh, wV вектора кутової швидкості горизонтально-стабілізованої платформи, де безпосередньо встановлено гіроскопічний датчик 1 гравітаційного прискорення, викликають появу моментів Mk10 та Mk кориолісових сил інерції (гіроскопіч11 них моментів) від переносної кутової швидкості горизонтально-стабілізованої платформи. Момент Mk10 , який прикладений відносно осі 10 внутріш 11 88473 нього підвісу першого гіромотора, та момент Mk 11 , який прикладений відносно осі 11 внутрішнього 12 підвісу другого гіромотора, визначаються наступним чином: ( ) = H2 × (wx × cos b2 + wh × sin a × sin b2 - wV × cos a × sin b2 ), (7) Mk10 = H1 × wx × cos b1 + wh × sin a × sin b1 - wV × cos a × sin b1 , (6) Mk 11 де H1 - кінетичний момент, що створюється обертанням ротора першого гіромотора 5; Н2 кінетичний момент, що створюється обертанням ротора другого гіромотора 6. Також при обертанні першого гіромотора 5 навколо осі 10 внутрішнього підвісу першого гіромотора та другого гіромотора 6 навколо осі 11 внутрішнього підвісу другого гіромотора через наявність сил тертя в підшипниках цих осей виникають моменти відповідно Mт 10 та Mт : 11 & & Мт = -Мт × signb1 - f1 × b1, (8 ) 10 1 & & Мт11 = -Мт 2 × signb2 - f2 × b2, ( 9) де Mт 10 , Mт - моменти сил сухого тертя, а 11 & , f × b - моменти сил в'язкого тертя в під& f1 × b1 2 2 шипниках осі 10 внутрішнього підвісу першого гіромотора та осі 11 внутрішнього підвісу другого гіромотора відповідно. Моменти Mg, W10 , Mg,W , Mk10 , Mk намага11 11 ються повернути перший гіромотор 5 навколо осі 10 внутрішнього підвісу першого гіромотора та другий гіромотор 6 навколо осі 11 внутрішнього підвісу другого гіромотора. Моменти Mін10 , Mін , 11 Mт 10 , Mт протидіють цьому. Такий поворот регу11 люється електромеханічним сельсинним зв'язком між першим промотором 5 та другим промотором 6 і контуром корекції між віссю 10 внутрішнього підвісу першого гіромотора та віссю 17 підвісу зовнішньої рамки. Утворений з'єднаними в протифазі сельсинами 8 та 9 електромеханічний зв'язок між першим промотором 5 та другим промотором 6 має передавальний коефіцієнт: j=-1, (10) що означає взаємовіднімання моментів, прикладених до осі 10 внутрішнього підвісу першого гіромотора та осі 11 внутрішнього підвісу другого гіромотора, а також створює такі умови, що: b1 = -b2 = b. (11) Додаткові конструктивні умови: l1 = -l 2 = l. (12) Н1=-Н2=Н, (13) m1=m2=m (14) спричиняють те, що сумарний момент відносно осі, паралельної осі 10 внутрішнього підвісу першого гіромотора та осі 11 внутрішнього підвісу другого гіромотора, не містить взагалі моментів Mін10 , Mін 11 і складових моментів Mk10 , Mk , 11 Mg, W10 , Mg,W , що залежать від sin b . 11 Таким чином, дана система призводить до компенсації моментів від горизонтальних складових WV , Wh вектора лінійного прискорення горизонтально-стабілізованої платформи, моментів від горизонтальних складових gh, gV вектора гравітаційного прискорення, моментів від горизонтальних складових wh, wV вектора кутової швидкості горизонтально-стабілізованої платформи, а також мо& & ментів від горизонтальних складових , wh, wV вектора кутового прискорення горизонтальностабілізованої платформи. Незкомпенсовані складові моментів Mg, W10 , Mg,W , Mk10 , Mk викликають обертання першо11 11 го гіромотора 5 навколо осі 10 внутрішнього підвісу першого гіромотора та обертання другого гіромотора 6 навколо осі 11 внутрішнього підвісу другого гіромотора, і тому: b ¹ 0. (15 ) Тут починає діяти контур корекції між віссю 10 внутрішнього підвісу першого гіромотора та віссю 17 підвісу зовнішньої рамки. Перший датчик 14 кута повороту, встановлений на осі 10 внутрішнього підвісу першого гіромотора, вимірює кут b і пе редає сигнал пропорційний куту b на підсилюючий елемент 15, вихід якого підключено до датчика 16 моменту. Датчик 16 моменту, відповідно до вхідного сигналу, створює корекційний момент Мкор : Mкор = -Кк × b, (16 ) де Кк - загальний передавальний коефіцієнт описаного каналу. Датчик 16 моменту прикладає Мкор до осі 17 підвісу зовнішньої рамки. Під дією Мкор рамка 7 & набуває кутової швидкості a , достатньої, щоб скомпенсувати сумарний момент відносно осі, яка паралельна осі 10 внутрішнього підвісу першого гіромотора та осі 11 внутрішнього підвісу другого гіромотора, і, таким чином, забезпечити малість кута b так, щоб значення cos b було якомога ближче до одиниці. Виходячи із загальних принципів опису динаміки гіроскопічних систем [4], [6], кут a(t) повороту зовнішньої рамки 7 в усталеному режимі: 13 a уст ( t ) = ( 1 (H1 - H2 ) 88473 t ò (Mg, W 10 t поч ) & & - Mт × sign b + Мт × sign b )dt = 1 2 + 1 H 14 - Mg, W11 + Mін10 - Mін11 + Mk 10 - Mk 11 + ml H t ò t поч t 1 (Wx - gx )dt + H ò (- H × wx )dt + (17) t поч t æМ +М ö т2 & ç т1 × sin gb ÷dt, ç ÷ 2 ø t поч è ò де tпоч - момент часу початку відліку даних; t момент часу кінця відліку даних. «Корисною» складовою сигналу в такому випадку є: aпер.уст ( t ) = m×l × H t t ò Wxdt + ò t поч t поч Сигнал a(t) сприймається другим датчиком 18 кута повороту, встановленим на осі 17 підвісу зовнішньої рамки, і є основним вихідним сигналом гіроскопічного датчика 1 гравітаційного прискорення. З виходу другого датчика 18 кута повороту даний сигнал потрапляє в БЦОМ 4 для обробки. Наявність підключених до БЦОМ 4 першого датчика 14 кута повороту та третього датчика 22 кута повороту створює можливість для БЦОМ 4 перед початком обробки основного сигналу a(t) гіроскопічного датчика гравітаційного прискорення, отриманого з другого датчика 18 кута повороту, проводити моніторинг коректності роботи системи двох пов'язаних сельсинів 8 та 9. БЦОМ 4 зчитує дані про кут b1 з виходу першого датчика 14 кута повороту, який встановлений на осі 10 внутрішнього підвісу першого гіромотора, та про кут b2 з виходу третього датчика 22 кута повороту, який встановлений на осі 11 внутрішнього підвісу другого гіромотора, для перевірки умови: b1 = -b2 ± Db, (20) де Db - модуль різниці між кутами b1 та b2 , якою можна знехтувати і вважати такою, що прямує до нуля. Для обчислення середнього значення вертикальної складової вектора гравітаційного прискорення gx БЦОМ 4 обирає інтервали виміряних значень сигналу a(t) за даними про стабільність на цих інтервалах кінетичних моментів першого гіромотора 5 та другого гіромотора 6. Для цього БЦОМ 4 впродовж всього часу, доки тривають вимірю& вання, зчитує дані про частоту g1 з виходу першого датчика 20 частоти обертання, який встановлений на осі 12 обертання ротора першого & гіромотора, та про частоту g 2 з виходу другого датчика 21 частоти обертання, який встановлений на осі 13 обертання ротора другого гіромотора. За отриманими даними БЦОМ 4 обирає інтервали, для яких виконуються умови щодо стабіль aкор.уст ( t ) = m×l H t ò gxdt. (18) t поч Інші складові є сигналами перешкод: t 1 ç (- wx )dt + H ò æ Mт ç t поч è 1 + Мт 2 2 ö & × sin gb ÷dt. (19) ÷ ø ності і рівності частот обертання ротора першого гіромотора 5 та ротора другого гіромотора 6: & & & g1.i = - g 2.i ± Dg, (21) & де g1.i - відповідне i-тому інтервалу значення & частоти обертання g1 ротора першого гіромотора & 5; g 2.i - відповідне i-тому інтервалу значення час& тоти обертання g 2 ротора другого гіромотора 6; & & Dg - модуль різниці між частотами обертання g1.i & 2.i , якою можна знехтувати і вважати такою, та g що прямує до нуля. Для кожного i-того обраного інтервалу БЦОМ 4 виконує операцію обчислення поточного статичного передавального коефіцієнта гіроскопічного датчика 1 гравітаційного прискорення з урахуванням відповідних кожному такому інтервалу значень & & g1.i та g 2.i : m×l m×l = , (22) & Hi J × gi & & g + ( - g 2.i ) & gi = 1.i , (23) 2 J=J1=J2, (24) де J1 - момент інерції ротора першого гіромотора 5 відносно осі 12 обертання ротора першого гіромотора; J2 - момент інерції ротора другого гіромотора 6 відносно осі 13 обертання ротора другого гіромотора. Одночасно із зчитуванням основного сигналу & & a(t) і додаткових сигналів b1, b2, g1, g 2 . БЦОМ 4 зчитує дані з підключених до неї пристроїв: системи 2 визначення поточних навігаційних параметрів та вимірювача 3 поточної висоти. За отриманими даними БЦОМ 4 для кожного г-того обраного інтервалу розраховує величини: Rст.і = t k .i t k .i t n .i t n .i ò W x .i dt , ò w x .i dt , ( 25 ) 15 88473 де tn.i, tk.i - моменти часу початку і кінця відліку і-того інтервалу даних; Wx.i , wx.i - діючі на і-му інтервалі величини вертикальної складової Ψξ вектора лінійного прискорення та вертикальної складової wx вектора кутової швидкості горизонталь 16 Виконавши зазначені обчислення, БЦОМ 4 розраховує середнє значення вертикальної складової вектора гравітаційного прискорення gx,i для кожного і-того обраного інтервалу: но-стабілізованої платформи. gx.i = é ù t k .i t k .i -1 ê (a( tk.i ) - a(tn.i )) - Rcт.i × ( ò Wx.idt) + ( ò wx.idt)ú × 1 . (26) ú (t - t ) Rст.і ê 1 t n .i t n.i ê ú k.i n.i ë û В загальному випадку БЦОМ 4 виконує додатково редукцію отриманого значення вертикальної складової вектора гравітаційного прискорення. Література: 1. Патент України на винахід №53478 A, G01V7/00. Гравіметр / С.О. Нечай, Д.Г. Тулупов, О.М. Безвесільна, К.В. Меньшикова, Є.І. Бобруйко. - №2002064813; Заявл. 11.06.2002; Опубл. 15.01.2003, Бюл. №1. 2. Безвесільна О.М. Про підвищення точності вимірювання прискорення сили тяжіння // Прикладна механіка, 1995. - №2. - С.92-96. 3. Павловский М.А., Путята Т.В. Теоретическая механика: Учебное пособие. - К.: Вища школа, 1985. - 328с. 4. Одинцов А.А. Динамически настраиваимые гироскопы. - К.: НМК ВО, 1992. - 68с. 5. Черников С.А. Динамика нелинейных гироскопических систем. - М.: Машиностроение, 1981. 224с. 6. Каргу Л.И. Точность гироскопических устройств систем управления летательных аппаратов. - М.: Машиностроение, 1990. - 208с. 17 Комп’ютерна верстка О. Рябко 88473 Підписне 18 Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюTwo-rotor integrating gyroscopic gravimeter with controlled parameters
Автори англійськоюBezvesilna Olena Mykolaivna, Dobrzhanskyi Oleksandr Oleksiiovych
Назва патенту російськоюДвухроторный интегрирующий гироскопический гравиметр с контролируемыми параметрами
Автори російськоюБезвесильна Елена Николаевна, Добржанский Александр Алексеевич
МПК / Мітки
МПК: G01C 19/00, G01V 7/00
Мітки: гіроскопічний, контрольованими, параметрами, двороторний, гравіметр, інтегруючий
Код посилання
<a href="https://ua.patents.su/9-88473-dvorotornijj-integruyuchijj-giroskopichnijj-gravimetr-z-kontrolovanimi-parametrami.html" target="_blank" rel="follow" title="База патентів України">Двороторний інтегруючий гіроскопічний гравіметр з контрольованими параметрами</a>
Гравіметр
Номер патенту: 53478
Опубліковано: 15.01.2003
Автори: Нечай Сергій Олексійович, Безвесільна Олена Миколаївна, Тулупов Дмитро Григорович, Меншикова Катерина Вікторівна, Бобруйко Євген Ігоревич
МПК: G01V 7/00
Мітки: гравіметр
Формула / Реферат:
Гравіметр, виконаний на основі триступеневого гіроскопа, що містить ротор, центр мас якого зміщений вздовж осі обертання відносно осей карданового підвісу, датчики кута та датчики моменту для реєстрації та компенсації відхилень ротора, який відрізняється тим, що ротор приєднаний до привідного вала через пружні торсіони, перпендикулярні до осі привідного вала, та карданові кільця, при цьому обертання привідного вала забезпечує двигун, кутова...
Гравіметр
Номер патенту: 78620
Опубліковано: 10.04.2007
Автори: Нечай Сергій Олексійович, Подчашинський Юрій Олександрович, Безвесільна Олена Миколаївна, Коробійчук Ігор Вацлавович
МПК: G01V 7/00
Мітки: гравіметр
Формула / Реферат:
Гравіметр, що містить двоступеневий динамічно настроюваний гіроскоп (1), до якого підключений датчик (4) моменту, ротор (2) та датчик (3) кута повороту, який відрізняється тим, що центр мас ротора (2) двоступеневого динамічно настроюваного гіроскопа (1) зміщений відносно осі його обертання, введено фільтр (5) нижніх частот і пристрій (6) обчислення вихідного сигналу гравіметра, причому вхід датчика (3) кута повороту підключено до виходу...
Гіроскопічний пристрій для азимутального орієнтування напрямків
Номер патенту: 83608
Опубліковано: 25.07.2008
Автори: Горєлов Євгеній Михайлович, Пригода Надія Вячеславівна, Ліхоткін Олександр Михайлович, Юр'єв Юрій Юрійович, Машиністов Едуард Сергійович
МПК: G01C 19/00
Мітки: гіроскопічний, напрямків, пристрій, азимутального, орієнтування
Формула / Реферат:
1. Гіроскопічний пристрій для азимутального орієнтування напрямків, що являє собою гіроблок, в якому на торсіонному підвісі закріплений маятниковий чутливий елемент, що містить гіромотор з горизонтальною віссю власного обертання, відлікове дзеркало, маломоментний контактний пристрій та аретир, який відрізняється тим, що має контрольний елемент, азимут якого визначається, виконаний у вигляді двобічного плоского дзеркала,...
Гравіметр
Номер патенту: 86005
Опубліковано: 25.03.2009
Автори: Подчашинський Юрій Олександрович, Коробійчук Ігор Вацлавович, Безвесільна Олена Миколаївна
МПК: G01C 19/00, G01V 7/00
Мітки: гравіметр
Формула / Реферат:
Гравіметр, що містить двостепеневий динамічно настроюваний гіроскоп (1), на корпусі якого встановлені датчик (3) кута повороту і датчик (4) моменту, який відрізняється тим, що центр мас ротора (2) двоступеневого динамічно настроюваного гіроскопа (1) зміщений у напрямку, перпендикулярному до осі його обертання, додатково введений пристрій (5) обчислення і компенсації похибок вимірювань, обумовлених викривленням траєкторії руху ротора (2),...
Спосіб вимірювання топогеодезичних показників та гіроскопічний інклінометр для його реалізації
Номер патенту: 60288
Опубліковано: 15.09.2003
Автори: Мурзаханов Олександр Валентинович, Шервашидзе Володимир Варламович, Леоненко Костянтин Миколайович
МПК: G01P 9/00
Мітки: спосіб, реалізації, вимірювання, показників, інклінометр, топогеодезичних, гіроскопічний
Формула / Реферат:
1. Спосіб вимірювання топогеодезичних показників за допомогою гіроскопічного інклінометра, який полягає у тому, що інклінометр занурюють до об'єкта вимірювань, опускають або піднімають з постійною швидкістю, у процесі неперервного руху через рівні проміжки часу вимірюють та розраховують інклінометричні показники об'єкта, який відрізняється тим, що за командою оператора у будь-який момент часу інклінометр зупиняють, у точці зупинки вимірюють...
Попередній патент: Похідні піридазин-3(2н)-ону і їх застосування як інгібіторів фдe4
Наступний патент: Спосіб одержання потоку цукрового продукту з целюлозної біомаси