Датчик кутового положення і лінійної швидкості
Номер патенту: 34944
Опубліковано: 26.08.2008
Автори: Субота Анатолій Максимович, Симонов Володимир Федорович, Кулік Анатолій Степанович
Формула / Реферат
Датчик кутового положення і лінійної швидкості, що містить гіроскоп, внутрішню і зовнішню рами, перетворювачі кутового положення рам, який відрізняється тим, що на зовнішній стороні внутрішньої рами симетрично на протилежних її сторонах відносно осі підвісу установлені дві сейсмічні маси у пружних підвісах, центри мас котрих лежать на осі підвісу зовнішньої рами, а осі підвісусейсмічних мас розташовані паралельно осі підвісу внутрішньої рами, при цьому осі підвісів внутрішньої і зовнішньої рам з одного боку зв'язані з перетворювачами їх кутового положення, а з другого боку - з пристроями їх аретирування, входи яких з'єднані з блоком керування.
Текст
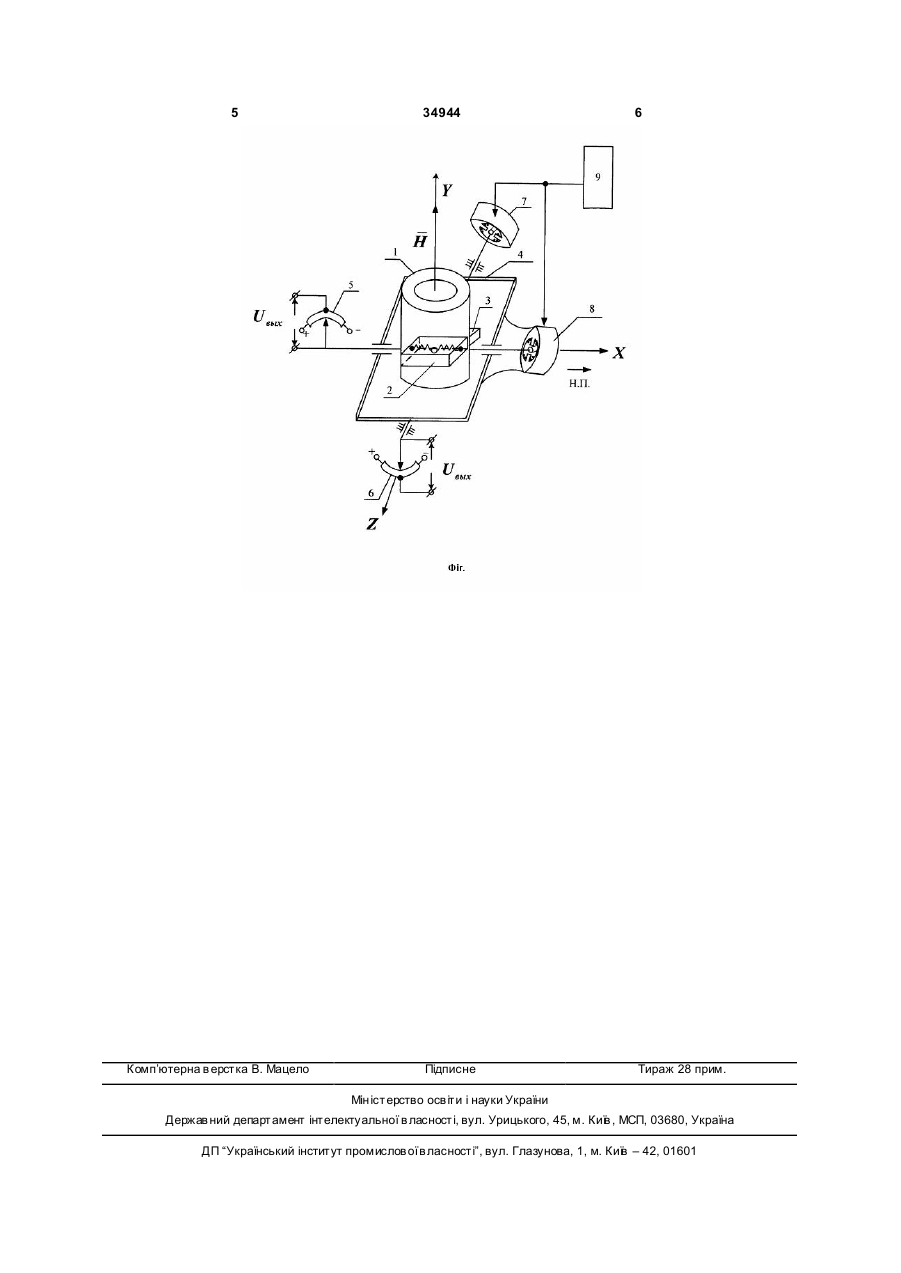
Датчик кутового положення і лінійної швидкості, що містить гіроскоп, внутрішню і зовнішню ра 3 34944 4 осі. Таким чином поставлена задача повністю відСила, що діє на кожну сейсмічну масу в реповідає даній корисній моделі. зультаті польоту літального апарата з прискоренЗапропоноване технічне рішення пояснюється & ням Vx дорівнює кресленням на Фіг. & (5) Fx = mV x Датчик кутового положення та лінійної швидкості вміщує внутрішню раму з гіроскопом 1, сейсПід дією сили Fx виникає сила пружної деформічні маси 2, 3 у пружному підвісі, зовнішню раму мації пружини 4, перетворювачі кутового положення рам 5, 6, Fпр=Кж Х, (6) аретируючі пристрої 7, 8, блок управління 9. де Кж – жорсткість пружного підвісу. Принцип дії датчика заключається в наступноОскільки Fпp=F x, то з сумісного рішення (5) і (6) му. На Фіг. показано орієнтацію датчика на літальмаємо ному апараті, де зв'язану з літальним апаратом & m · V x (7) X = . систему координат позначено OXYZ. К ж У даному випадку вісь підвісу внутрішньої раПісля підстановки (7) у (4), знаходимо, що куми 1 паралельна поздовжній осі літального апаратова швидкість прецесії відносно осі X дорівнює та ОХ, вісь підвісу зовнішньої рами 4 розташована паралельно поперечній осі літального апарата OZ, 2 ·m · g m & & wх = · · Vx = KVx , (8) H Kж а вісь кінетичного моменту гіроскопа H співпадає з вертикальною віссю симетрії літального апарата 2·m·g m OY. Перед запуском літального апарата за доподе K = · - постійний коефіцієнт. H Kж могою аретируючих пристроїв 7 і 8 осі підвісу внуПрипустимо, що такт вимірювання дорівнює t. трішньої і зовнішньої рам строго зафіксовані параТоді за час вимірювання t внутрішня рама 1 повелельно осям зв'язаної системи координат OXYZ. рнеться на визначений кут Після подачі живлення на гіроскоп і виходу його на номінальні оберти датчик готовий до роботи. t t & & (9) a = w dt = K V dt , При відсутності прискорення V x вздовж осі ОХ, сейсмічні маси 2 і 3 займають положення, що відповідає зааретированому стану. При виникненні & прискорення V x літального апарата під час польоту сейсмічні маси 2 і 3 зміщуються на величину X, в результаті чого відносно осі OZ виникає момент Mz=2mgx, (1) де m, g - відповідно маса сейсмічної маси і прискорення свободного падіння. Момент Mz призводить до появи кутової швидкості прецесії wx відносно осі ОХ wx = Mz , H (2) де Н – кінетичний момент гіроскопа. З появою wx виникає гіроскопічний момент z MГ , котрий зрівноважує момент MZ: Mz = MZ . Г (3) & Таким чином, при виникненні прискорення V x зовнішня рама 4 не змінює свого початкового положення у просторі. З ура хуванням (1) вираження (2) приймає наступний вид 2mg wx = ·X. (4) H ò x 0 звідки a = KVx . ò x 0 (10) Як видно з (10), кут повороту внутрішньої рами 1 прямо пропорційний швидкості польоту літального апарата. При цьому сигнал, що виробляється за допомогою перетворювача кутового положення 5 подається в систему управління швидкістю літального апарата, а сигнал, що виробляється з перетворювача кутового положення 6 - в систему стабілізації кутового положення, наприклад, в систему стабілізації літального апарата по тангажу. До позитивних якостей вимірювання за допомогою даного приладу можна віднести і те, що в моменти горизонтального польоту і відсутності прискорення за допомогою аретируючих пристроїв гіроскоп і його внутрішня і зовнішня рами можуть бути приведені в початковий стан. Цим самим ліквідуються усі похибки, що можуть накопичуватися за рахунок наявності дебалансу і інших збурюючих факторів. Таким чином поставлена задача повністю вирішується. Корисна модель дійсно забезпечує вимірювання водночас як кутове положення літального апарата так і лінійну швидкість, що при наявності трьох таких пристроїв на літальному апараті дозволяє спроектувати інерціальний навігаційний блок з меншими габаритами та масою відповідно до блоків, що містить окремі вимірювачі кутового положення і лінійного прискорення відносно осей X,Y і Z. 5 Комп’ютерна в ерстка В. Мацело 34944 6 Підписне Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюIndicator of angular position and linear velocity
Автори англійськоюKulik Anatolii Stepanovych, Subota Anatolii Maksymovych, Symonov Volodymyr Fedorovych
Назва патенту російськоюДатчик углового положения и линейной скорости
Автори російськоюКулик Анатолий Степанович, Суббота Анатолий Максимович, Симонов Владимир Федорович
МПК / Мітки
МПК: G01P 3/00
Мітки: кутового, швидкості, датчик, положення, лінійної
Код посилання
<a href="https://ua.patents.su/3-34944-datchik-kutovogo-polozhennya-i-linijjno-shvidkosti.html" target="_blank" rel="follow" title="База патентів України">Датчик кутового положення і лінійної швидкості</a>
Датчик кутового положення вала обертання механізмів
Номер патенту: 75850
Опубліковано: 15.05.2006
Автори: Гринькович Орест Степанович, ОЛІЯРНИК БОГДАН ОЛЕКСІЙОВИЧ, Іванов Володимир Іванович, Бондарук Артур Богданович, Татарінов Костянтин Костянтинович, Смулка Ігор Степанович
МПК: G01B 7/30, H01C 10/00
Мітки: механізмів, обертання, кутового, датчик, положення, вала
Формула / Реферат:
1. Датчик кутового положення вала обертання механізмів, який містить корпус, в якому жорстко закріплений потенціометр, на осі якого розміщена шестірня, встановлений в опорі вихідний вал, рознім, який відрізняється тим, що вихідний вал встановлений в двох опорах, а на його кінці, що знаходиться в корпусі, жорстко закріплений плоский зубчатий сегмент зовнішнього зчеплення, зуби якого взаємодіють з зубами шестірні, по обидві сторони якої...
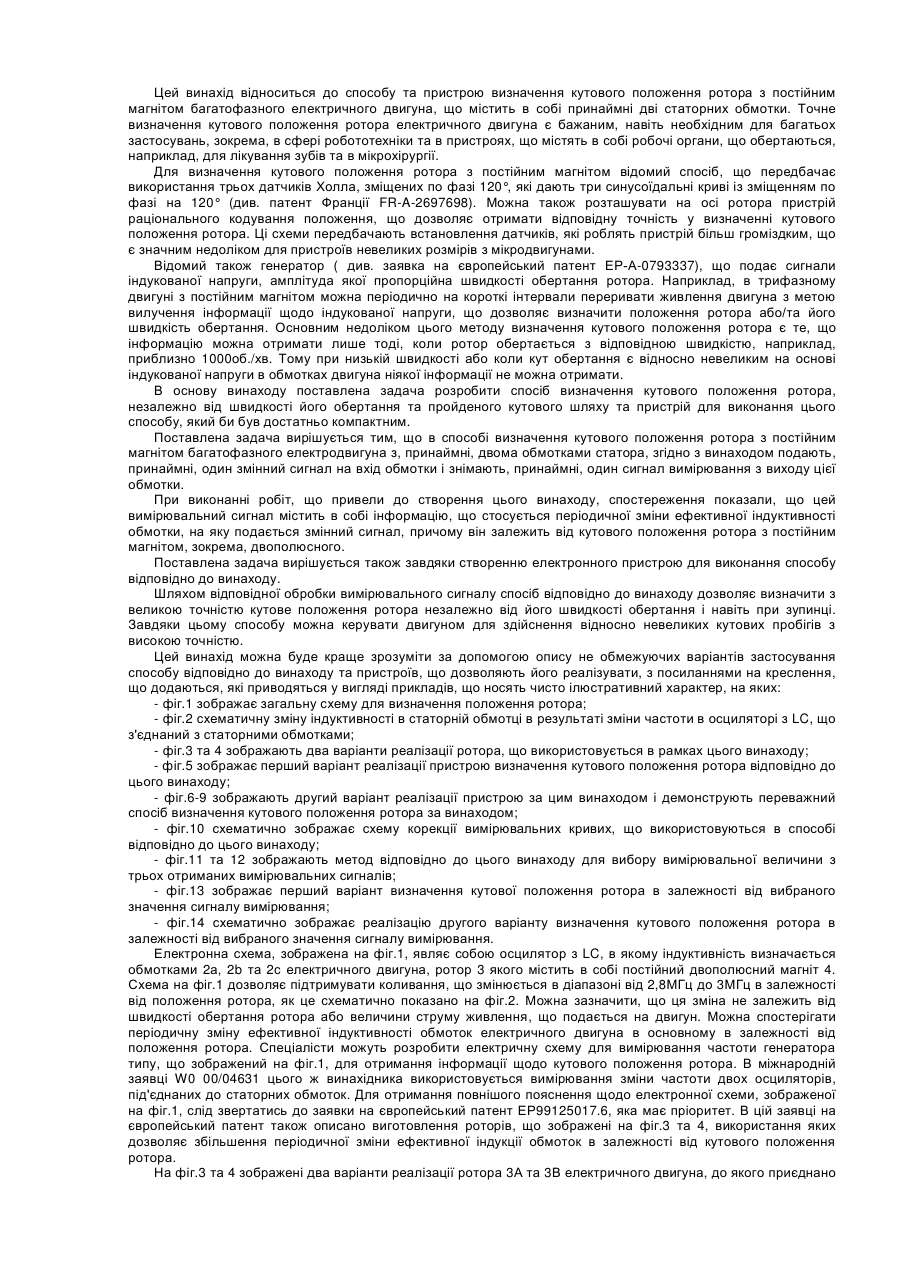
Спосіб та пристрій для визначення кутового положення ротора з постійним магнітом багатофазного електричного двигуна
Номер патенту: 72249
Опубліковано: 15.02.2005
Автор: Жан-П'єр Войллат
МПК: H02P 6/14
Мітки: визначення, двигуна, багатофазного, пристрій, кутового, положення, постійним, магнітом, ротора, спосіб, електричного
Формула / Реферат:
1. Спосіб визначення кутового положення ротора з постійним магнітом багатофазного електричного двигуна, що містить принаймні дві статорних обмотки, який включає подачу змінних сигналів на обмотки двигуна і обробку сигналів, отриманих з виходу цих обмоток, який відрізняється тим, що подають перший змінний сигнал, що має першу частоту, на перший кінець, принаймні, першої з вказаних обмоток, знімають сигнал вимірювання за допомогою...
Спосіб визначення лінійної швидкості вітру
Номер патенту: 82426
Опубліковано: 10.04.2008
Автор: Кравченко Микола Іванович
МПК: G01S 13/95
Мітки: визначення, лінійної, швидкості, вітру, спосіб
Формула / Реферат:
Спосіб визначення лінійної швидкості вітру, що полягає у вимірі доплерівського зсуву частот у двох азимутальних напрямках при роботі за режимом кругового огляду метеорологічної радіолокаційної станції (РЛС) із наступним визначенням лінійної швидкості вітру, який відрізняється тим, що доплерівський зсув частот виміряють для усіх довільних поточних пар азимутальних напрямків вимірювання, які зміщені відносно один одного на вибрану величину.
Вимірювальний перетворювач для визначення кількості обертів, кутової швидкості та кутового прискорення

Номер патенту: 9702
Опубліковано: 17.10.2005
Автори: Шабатура Юрій Васильович, Овчинников Костянтин В'ячеславович
МПК: G01P 1/00
Мітки: кутової, визначення, кількості, обертів, вимірювальний, кутового, перетворювач, прискорення, швидкості
Формула / Реферат:
Вимірювальний перетворювач для визначення кількості обертів, кутової швидкості та кутового прискорення, що містить вал, модулятор світлового потоку, який зв’язаний з валом, джерело світла, розташоване навпроти модулятора, фотоприймач, діафрагму, яка розташована перед фотоприймачем, який відрізняється тим, що до нього введено корпус, другу діафрагму, яка розташована перед джерелом світла, причому обидві діафрагми виконано щілинними і...
Датчик кутової швидкості
Номер патенту: 8382
Опубліковано: 15.08.2005
Автори: Щадних Катерина Олександрівна, Прийма Віктор Володимирович, Джулгаков Віталій Георгійович, Субота Анатолій Максимович
МПК: G01P 9/00
Мітки: кутової, швидкості, датчик
Формула / Реферат:
Датчик кутової швидкості, що містить гіровузол, датчики кута, моменту і підсилювач зворотного зв'язку, який відрізняється тим, що в нього додатково введені два підсилювачі, аналого-цифровий та цифро-аналоговий перетворювачі, пристрій вибору та збереження інформації, чотири ключі, реверсивний лічильник, блоки керування і синхронізації, і причому вихід датчика кута через перший підсилювач, аналого-цифровий перетворювач, пристрій вибору та...
Попередній патент: Спосіб підключення конденсаторів індивідуальної компенсації реактивної потужності асинхронного двигуна
Наступний патент: Застосування монокристала напівпровідникового твердого розчину селеніду галію-індію (ga0,3in0,7)2se3 як матеріалу для функціональних пристроїв оптоелектроніки
Випадковий патент: Дводзеркальний антенний компактний полігон