Пристрій для знаходження об’єкта, який рухається по рейках
Номер патенту: 13411
Опубліковано: 31.08.1998
Автори: Соболєв Юрій Володимирович, Ісаєв Леонід Олексійович, Бабаєв Михайло Михайлович, Демченко Олег Федорович, Прилипко Андрій Андрійович, Кошовий Сергій Васильович
Формула / Реферат
1. Устройство для обнаружения движущегося по рельсам объекта, содержащее два блока подмагничивания, расположенных внутри рельсовой колеи, между которыми установлены соосно первый и второй путевые датчики, выполненные магниточувствительными, первый - внутри рельсовой колеи возле одного рельса с возможностью взаимодействия с одним из колес колесной пары, отличающееся тем, что в него введены вычислитель и дополнительно третий и четвертый соосно установленные путевые датчики, выполненные магниточувствительными, причем третий установлен внутри рельсовой колеи возле одного рельса, а второй и четвертый - возле другого рельса снаружи рельсовой колеи, все датчики установлены на одинаковом расстоянии от рельсов, максимально приближенном к колесам колесных пар, а между собой - с возможностью одновременного взаимодействия с колесами колесных пар, при этом выходы первого, второго, третьего и четвертого путевых датчиков соединены соответственно с первым, вторым, третьим и четвертым входами вычислителя.
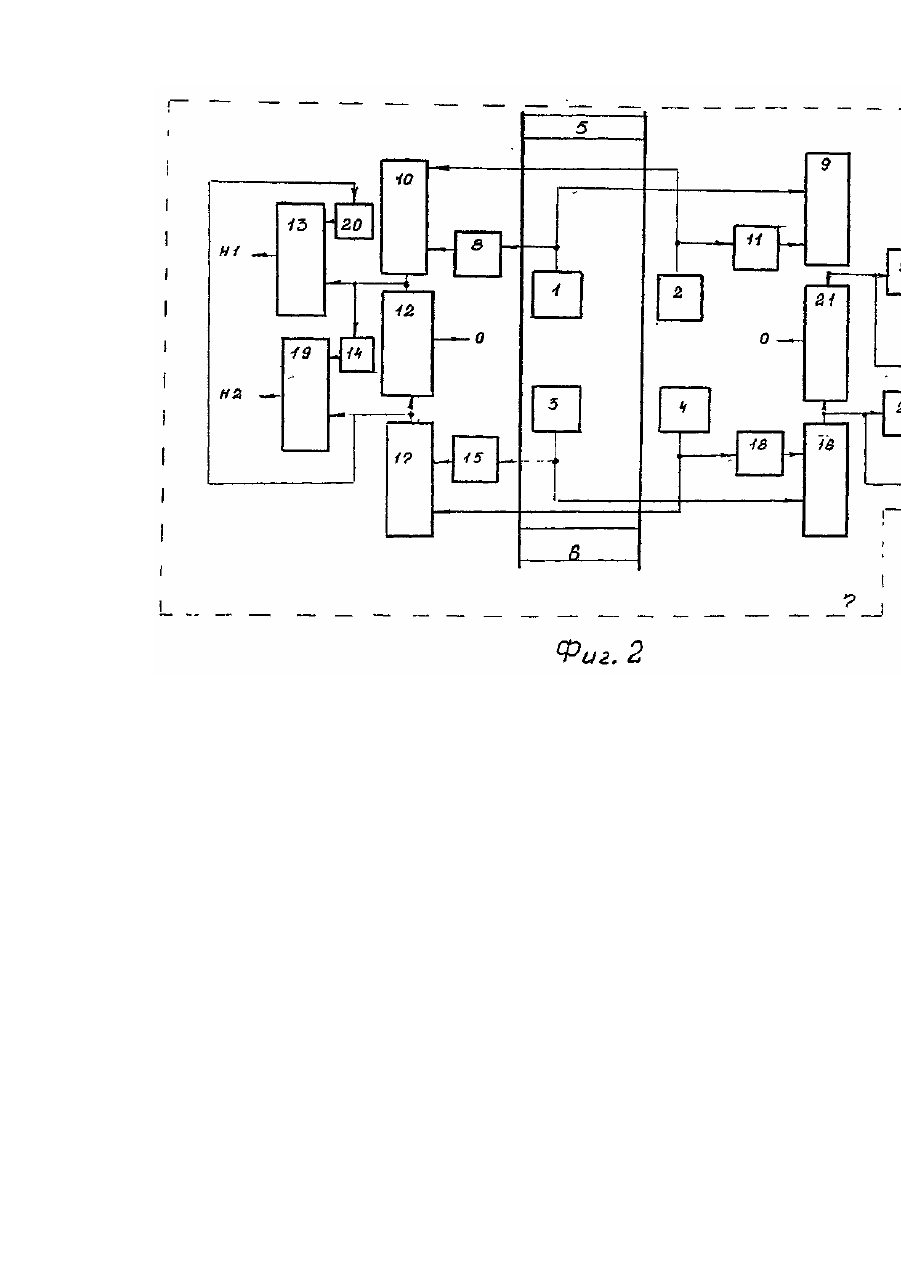
2. Устройство по п.1, отличающееся тем, что вычислитель содержит блоки совпадения и блоки инверторов, причем вход первого блока инвертора и вход второго блока совпадения подключены к первому входу вычислителя, выход первого блока инвертора соединен с одним из входов первого блока совпадения, вход второго блока инвертора и другой вход первого блока совпадения подключены к второму входу вычислителя, выход второго блока инвертора соединен с другим входом второго блока совпадения, выход первого блока совпадения соединен с одними входами третьего, четвертого блоков совпадения и входом третьего блока инвертора, выходы третьего и четвертого блоков совпадения подключены к первому выходу вычислителя, вход четвертого блока инвертора и один из входов пятого блока совпадения подключены к третьему входу вычислителя, выход четвертого блока инвертора соединен с одним из входов шестого блока совпадения, выход пятого и другой вход шестого блоков совпадения подключены к четвертому входу вычислителя, выход пятого блока инвертора соединен с другим входом пятого блока совпадения, выход шестого блока совпадения соединен с другим входом третьего блока совпадения, одним из входов седьмого блока совпадения и входом шестого блока инвертора, выходы шестого и третьего блоков инверторов соединены соответственно с другими входами четвертого и седьмого блоков совпадения, выход седьмого блока совпадения подключен к второму выходу вычислителя, выход второго блока совпадения соединен с одними из входов восьмого, девятого блоков совпадения и седьмым входом блока инвертора, выходы восьмого и девятого блоков совпадения подключены к третьему выходу вычислителя, выход пятого блока совпадения соединен с другими входами десятого, восьмого блоков совпадения, и входом восьмого блока инвертора, выходы седьмого и восьмого блоков инверторов подключены соответственно к другим входам девятого и десятого блоков совпадения, выход десятого блока совпадения подключен к четвертому выходу вычислителя.
Текст
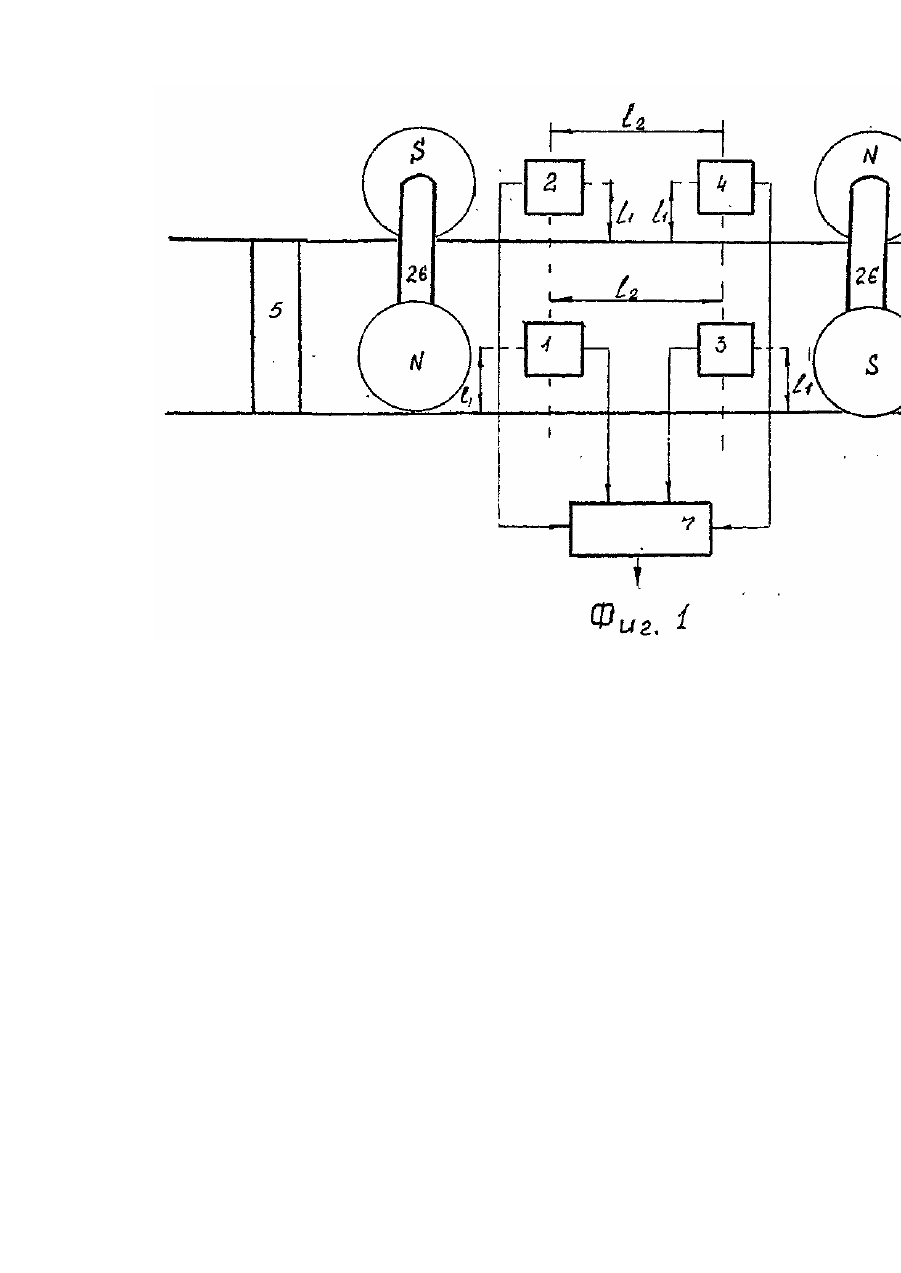
Изобретение относится к транспорту и может быть использовано в системах контроля и учета работы транспортных средств, в устройства х счета осей, измерения скорости и ускорения движения железнодорожных составов. Наиболее близким к заявляемому является устройство для обнаружения движущегося по рельсам объекта [Авт. св. № 147761, кл. В61L1/16, 15.12.86, опублик. БИ №17, 1989], содержащее установленный поперек рельсовой колеи магнит (в заявляемом решении - блок подмагничивания), два путевых датчика, выполненных магниточувствительными в виде феррозондов, выход каждого из которых соединен с блоком совпадения, один из датчиков установлену одного из рельсов, а другой датчик ~ У другого рельса с возможностью их взаимодействия с колесами колесной пары и расположены они после магнитов по направлению движения. Такое расположение путевых датчиков приводит к невозможности: - функционирования устройства на электрофицированных участках пути за смет влияния тягового тока рельсов с резной полярностью на феррозонды; - определения направления движения подвижной единицы. Кроме этого при значительном удалении блоков подмагничивания от путевых датчиков возможно изменение полярности колесных пар, что приведет к невосприимчивости устройством таких осей. В основу изобретения поставлена задача усовершенствовать устройство для обнаружения движущегося по рельсам объекта, в котором исключение отказов в обнаружении колесных пар и контроль их направления обеспечивается возможностью воспринимать остаточную намагниченность колес любой полярности, за счет чего повышается надежность и функциональные возможности. Задача решается тем, что в устройство для обнаружения движущегося по рельсам объекта, содержащее два блока подмагничивания, расположенные внутри рельсовой колеи, между которыми установлены соосно первый и второй магниточувствительные путевые датчики, из которых первый размещен внутри рельсовой колеи возле одного рельса с возможностью взаимодействия с одним из колес колесной пары движущегося объекта, согласно изобретения, введены вычислитель, выдающий сигнал вхождения колесной пары в зону действия устройства, сигнал наличия ее в зоне действия устройства и сигнал прохождения ее колесной парой для определения направления движения объекта, третий и четвертый магниточувстаительные путевые датчики, при этом третий магниточувствительный путевой датчик установлен внутри рельсовой колеи у упомянутого рельса, а второй и четвертый - возле другого рельса снаружи рельсовой шлеи, при этом датчики расположены на одинаковом расстоянии от рельсов с возможностью максимального приближения к колесам колесных пар движущегося объекта и одновременного взаимодействия с упомянутыми колесами, при этом выходы первого, второго, третьего и четвертого путевых датчиков соединены соответственно с первым, вторым, третьим и четвертым входами вычислител.. Вычислитель в устройстве для обнаружения движущегося по рельсам объекта содержит инверторы и блоки совпадения, Один из входов первого из которых подключены к выходу первого инвертора, входом которого, объединенным с одним их входов второго блока совпадения, образован первый вход вычислителя, второй вход которого образован объединенными входом инвертора и другим входом второго блока совпадения, выход первого блока совпадения соединен с входом третьего инвертора и одними из входов третьего и четвертого блоков совпадения, входом четвертого инвертора и одним из входов пятого блока совпадения образован третий вход вычислителя, выход четвертого инвертора соединен с одним из входов шестого блока совпадения, другим входом которого и упомянутым входом пятого блока совпадения образован четвертый вход вычислителя, выход пятого инвертора подключен к другому входу пятого блока совпадения, выход шестого блока совпадения соединен с другим входом третьего блока совпадения, одним из входов седьмого блока совпадения и входом шестого инвертора, выходы шестого и третьего инверторов соединены с другими входами соответственно четвертого и седьмого блоков совпадения, выход второго блока совпадения соединен с одними входами восьмого и девятого блоков совпадения и входом седьмого инвертора, выход пятого блока совпадения соединен с другими входами десятого и восьмого блоков совпадения и входом восьмого инвертора, а выходы седьмого и восьмого инверторов подключены соответственно к другим входам девятого и десятого блоков совпадения, при этом выходами третьего и четвертого блоков совпадения образован первый выход вычислителя выходом седьмого блока совпадения второй выход вычислителя, выходами восьмого и девятого блоков совпадения - третий выход вычислителя, а выходом десятого блока совпадения - четвертый выход вычислителя, блоков инверторов соединены соответственно с другими входами четвертого и седьмого блоков совпадения, выход седьмого блока совпадения подключен к второму выходу вычислителя, выход второго блока совпадения соединен с одними из входов восьмого, девятого блоков совпадения и седьмым входом блока инвертора, выходы .восьмого и девятого блоков совладения подключены к третьему выходу вычислителя, вы ход пятого блока совпадения соединен с другими входами десятого, восьмого блоков совпадения, и входом восьмого блока инвертора, выходы седьмого и восьмого блоков инверторов подключены соответственно к другим входам девятого и десятого блоков совпадения, выход десятого блока совпадения подключен к четвертому выходу вычислители. Такое техническое решение позволяет отфильтровать полезный сигнал от импульсов помех, что приводит к повышению отказоустойчивости и позволит применять устройство на электрофицированных участках пути, а также реагировать на колесные пары с различной полярностью. На фиг. 1 представлена функциональная схема устройства; на фиг. 2 - то же, с раскрытой блок-схемой вычислителя. Устройство для обнаружения движущегося по рельсам объекта состоит (фиг. 1) из четырех магниточувстви тельных путевых да тчиков (феррозондов) 1, 2, 3 и 4, причем первичные преобразователи первого и второго датчиков находятся на одной оси, а третьего и четвертого на другой. Расстояние 1 между этими осями выбирается из условия одновременного срабатывания феррозондов под действием колес колесной пары. Расстояние 1 между феррозондами и рельсами выбирается из условия максимального приближения к колесной паре с соблюдением габаритов. Устройство также содержит блоки подмагничивания 5 и 6, вычислитель 7, который состоит из блоков совпадения и блоков инверторов. Вход первого блока инвертора 8 и второго блока совпадения 9 соединены с выходом первого путевого датчика 1, а вы ход первого блока инвертора 8 связан с одним входом первого блока совпадения 10. Выход второго путевого датчика 2 подключен ко входу второго блока инвертора 11 и к второму входу первого блока совпадения 10, выход второго блока инвертора 11 соединен с другим входом второго блока совпадения 9, при этом выход первого блока совпадения 10 связан с одним входом третьего 12, четвертого 13 блоков совпадения и входом третьего блока инвертора 14. Выходы блоков третьего 12 и четвертого 13 блоков совпадения подключены к соответствующим выходным шинам вычислителя 7. Выход третьего датчика 3 соединен со входом четвертого блока инвертора 15 и с одним входом пятого блока совпадения 16. Выход четвертого блока инвертора 15 связан с одним из входов шестого блока совпадения 17. Выход четвертого путевого датчика 4 подключен ко входу пятого блока инвертора 18 и ко второму входу шестого блока совпадения 17, а выход пятого блока инвертора 18 соединен с другим входом пятого блока совпадения 16, при этом выход шестого блока совпадения 17 связан с. вторым входом третьего блока совпадения 12, одним входом седьмого блока совпадения 19 и входом шестого блока инвертора 20, а выход шестого и третьего блоков инверторов подключены к соответствующим вторым входам четвертого 13 и седьмого 19 блоков совпадения. Выход седьмого блока совпадения 19 подключен к соответствующим шинам вычислителя. Выход второго блока совпадения 9 связан с одним входом восьмого 21, девятого 22 блоков совпадения и седьмым блоком инвертора 23, а выходы восьмого 21 и девятого 22 блоков совпадения подключены к соответствующим выходным шинам вычислителя, при этом выход пятого блока совпадения 16 соединен с вторым входом десятого блока совпадения 24, с другим входом восьмого блока совпадения 21 и входом восьмого блока инвертора 25. Выходы седьмого 23 и восьмого 25 инверторов подключены к соответствующим вторым входам девятого 22 и десятого 24 блоков совпадения, при этом выход десятого блока совпадения 24 подсоединен к соответствующей вы ходной шине вычислителя 7. На фиг. 1 показана колесная пара 26. Устройство для обнаружения движущегося по рельсам объекта работает следующим образом. Блоки подмагничивания 5 и 6 обеспечивают намагничивание колесных пар 26 подвижного состава, проходящих в зоне действия устройства. При вхождении предварительно намагниченных колесных пар 26 с одним южным, а другим северным колесом, в зону действия феррозондов 1, 2,3, 4 на их выходах появляются сигналы, так как феррозонд является датчиком активного типа, преобразующим действующую на него напряженность внешнего постоянного поля в электрический сигнал. [Афанасьев К.В. Феррозонды. - Л. "Энергия", 1969. - 168с]. В результате в зависимости от колеса, находящегося над феррозондом, сигнал имеет отрицательную или положительную величину. В зависимости от этого срабатывают блоки совпадения (в зависимости от направления движения подвижного состава) 12 или 21 и 19 или 13 или 22 или 24 и на выходах сработавши х .блоков появляется сигнал', информирующий о направлении движения колесных пар и нахождении их в определенной точке пути. Рассмотрим работу вычислителя 7 при прохождении колесной пары справа налево. В исходном положении на выходах феррозондов 3 и 4 отсутствует сигнал. При нахождении колеса с южным плюсом над феррозондом 4 и северным над феррозондом 3, на выходе феррозонда 4 появляется положительный сигнал, а на выходе феррозонда 3 - отрицательный. В результате этого на выходе блока инвертора 15 возникает положительный сигнал, а значит на входах блока совпадения 17 появляются положительные импульсы, которые открывают блок совпадения 17 и на его выходе образуется положительный сигнал, который воздействует на один из входов блока совпадения 19, на другом входе которого в исходном положении также подается положительный импульс и как следствие блок совпадения 19 срабатывает, при этом на его выходе появляется сигнал, информирующий о приближении колеса к зоне срабатывания устройства. Этот сигнал выводится на выходную шину вычислителя 7. Когда колесная пара входит в зону срабатывания всех феррозондов на выходе феррозондов 1 и 2 появляются соответственно положительный и отрицательный импульсы, под действием которых срабатывает блок совпадения 10 и на выходе которого появляется положительный импульс. В результате образования положительных сигналов на выходах блоков совпадения 10 и 17 на входы блока совпадения 12 подаются положительный импульс и как следствие он срабатывает и на выходе его появляется сигнал, информирующий о наличии колесной пары в зоне срабатывания устройства. Этот сигнал подается на соответствующую выходн ую шин у вычислителя 7, После проследования колесной парой зоны срабатывания устройства, на феррозондах 3 и 4 отсутствует сигнал, а на феррозондах 1 и 2 в первый момент еще остаются сигналы той же полярности. В результате на выходе блока совпадения 17 появляется отрицательный импульс и как следствие срабатывает инвертор 20, при этом с выхода которого подается сигнал на один вход блока совпадения 13 и так как в это время на другой вход подается положительный импульс от блока совпадения 10, то блок совпадения 13 срабатывает, а на выходе его появляется сигнал информирующий о прохождении колесной парой зоны срабатывания устройства справа налево. Аналогичным образом работает вычислитель 7 при смене направления движения колеса и при изменении полярности на колесах колесной пары.
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for finding of object running on rails
Автори англійськоюBabaiev Mykhailo Mykhailovych, Demchenko Oleh Fedorovych, Isaiev Leonid Oleksiiovych, Koshovyi Serhii Vasyliovych, Prylypko Andrii Andriiovych, Soboliev Yurii Volodymyrovych
Назва патенту російськоюУстройство для нахождения объекта, движущегося по рельсам
Автори російськоюБабаев Михаил Михайлович, Демченко Олег Федорович, Исаев Леонид Алексеевич, Кошевой Сергей Васильевич, Прилипко Андрей Андреевич, Соболев Юрий Владимирович
МПК / Мітки
МПК: B61L 1/00
Мітки: пристрій, знаходження, рейках, об'єкта, рухається
Код посилання
<a href="https://ua.patents.su/4-13411-pristrijj-dlya-znakhodzhennya-obehkta-yakijj-rukhaehtsya-po-rejjkakh.html" target="_blank" rel="follow" title="База патентів України">Пристрій для знаходження об’єкта, який рухається по рейках</a>
Пристрій для знаходження акупунктурних точок
Номер патенту: 18524
Опубліковано: 25.12.1997
Автори: Порошин Володимир Владиславович, Іванців Роман-Андрій Дмитрович, Хорольський Юрій Іванович
МПК: A61H 39/02
Мітки: точок, знаходження, пристрій, акупунктурних
Формула / Реферат:
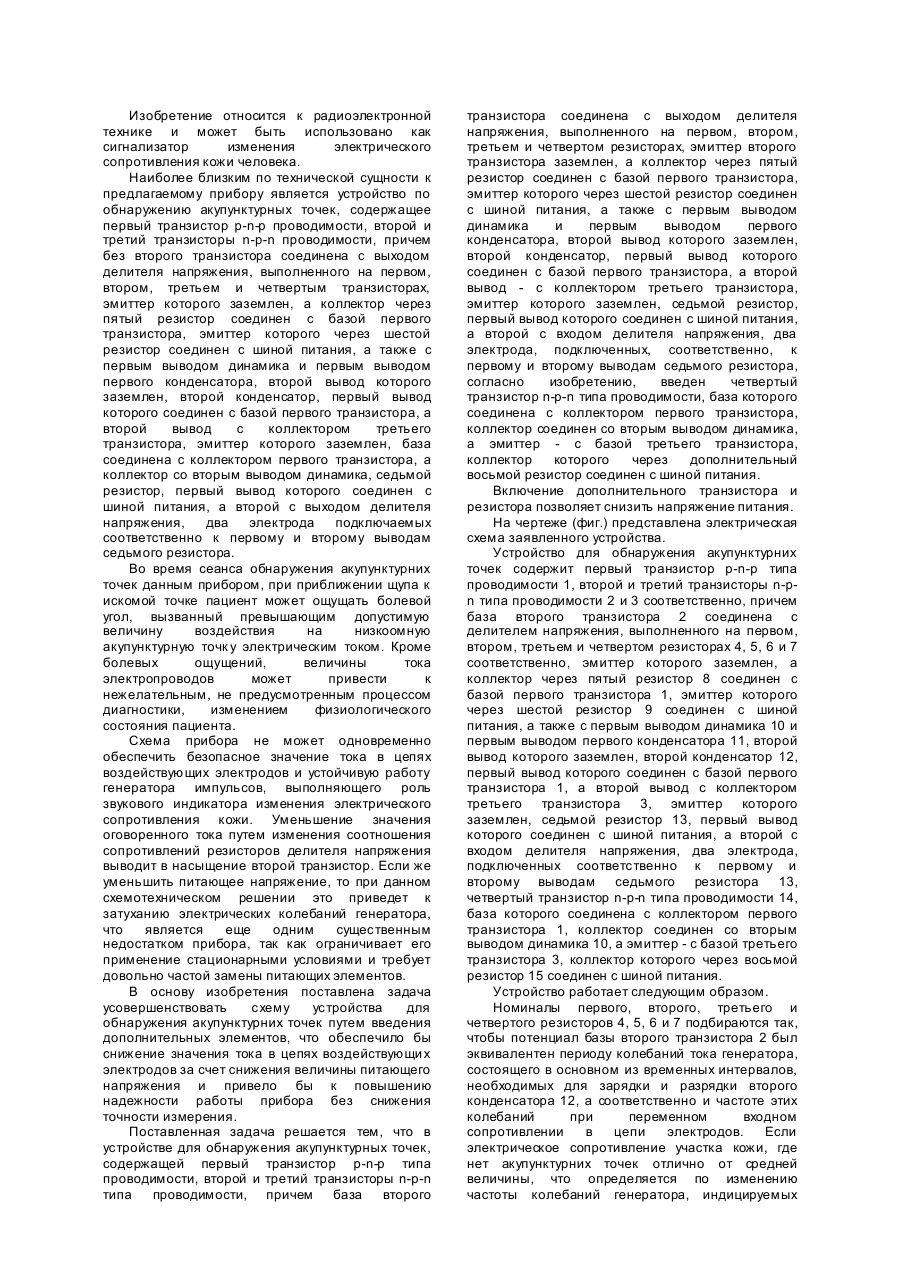
Устройство для обнаружения акупунктурних точек, содержащее первый транзистор p-n-р типа проводимости, второй и третий транзисторы n-p-n типа проводимости, причем база второго транзистора соединена с выходом делителя напряжения, выполненного на первом, втором, третьем и четвертом резисторах, эмиттер второго транзистора заземлен, а коллектор через пятый резистор соединен с базой первого транзистора, эмиттер которого через шестой резистор...
Багатоканальний сигнатурний аналізатор

Номер патенту: 6922
Опубліковано: 31.03.1995
Автори: Журавель Олександр Павлович, Дяченко Олег Миколайович
МПК: G06F 11/00
Мітки: аналізатор, сигнатурний, багатоканальний
Текст:
...о е д и н е н с п р я м ы м выходом последнего разряда первого счетчика, инверсный выход последнего разряда которого соединен со вторым входом элемента ИЛИ и с тактовым входом первого триггера, инверсный выход которого соединен с первым выходом третьего элемента И, второй вход которого соединен с выходом элемента ИЛИ, выход третьего элемента И соединен с тактовым входом второго триггера, вторым входом первого элемента И и входом элемента...
Каскадний пристрій швидкого перетворення фур’є
Номер патенту: 21376
Опубліковано: 02.12.1997
Автори: Коханов Олександр Борисович, Власенко Віктор Олексійович, Заганич Володимир Григорович
МПК: G06F 15/00, G06F 17/14
Мітки: швидкого, перетворення, каскадний, фур'є, пристрій
Формула / Реферат:
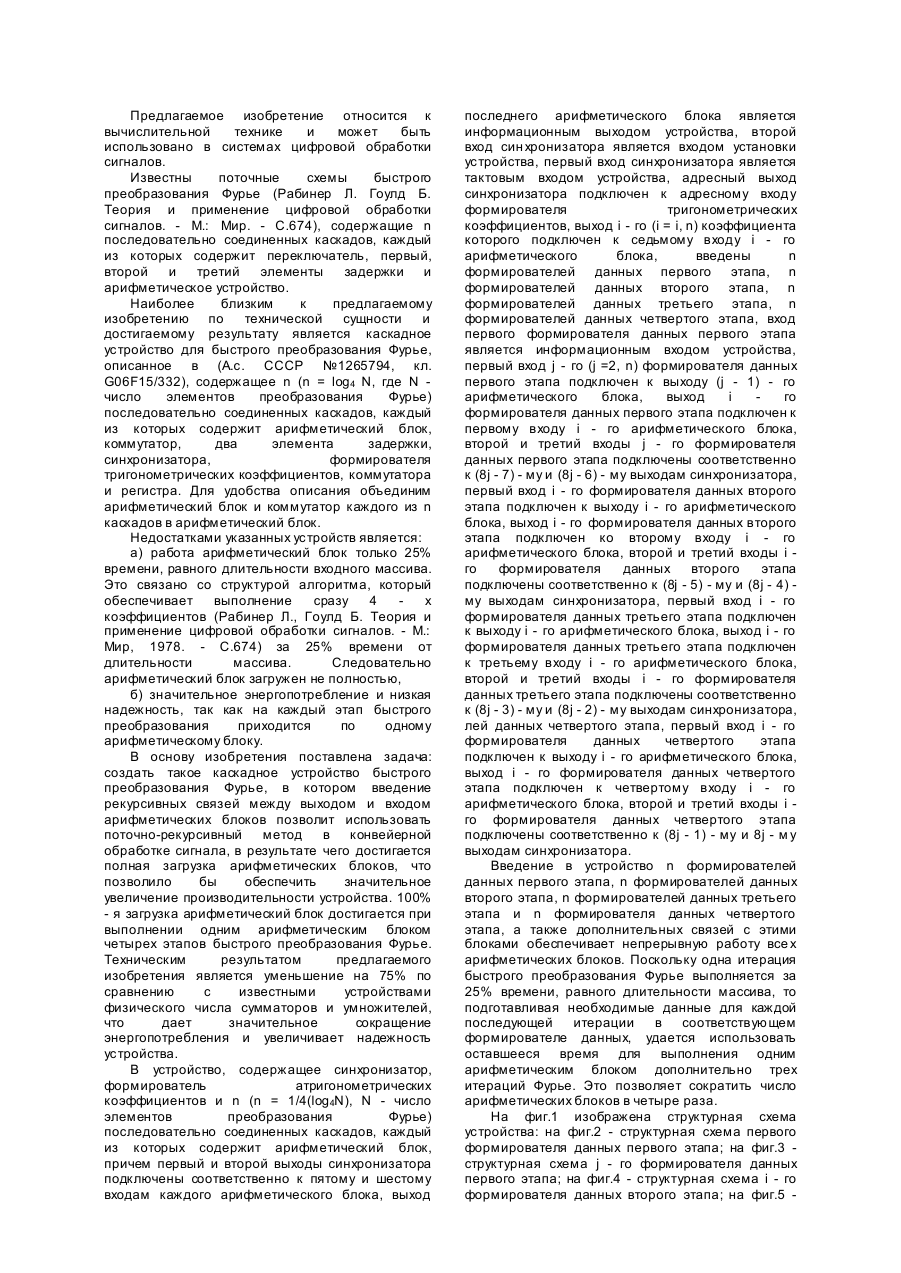
Каскадное устройство быстрого преобразования Фурье, содержащее синхронизатор, формирователь тригонометрических коэффициентов и n(n= =l/4(log4N), N - число элементов преобразования Фурье) последовательно соединенных каскадов, каждый из которых содержит арифметический блок, причем первый и второй выходы синхронизатора подключены соответственно к пятому и шестому входам каждого арифметического блока, выход последнего арифметического блока...
Пристрій для перевірення обмоток крокового двигуна
Номер патенту: 3964
Опубліковано: 27.12.1994
Автори: Грабенко Анатолій Костянтинович, Ельберт Леонід Соломонович
МПК: G01R 31/02, G01R 31/06
Мітки: пристрій, крокового, двигуна, обмоток, перевірення
Формула / Реферат:
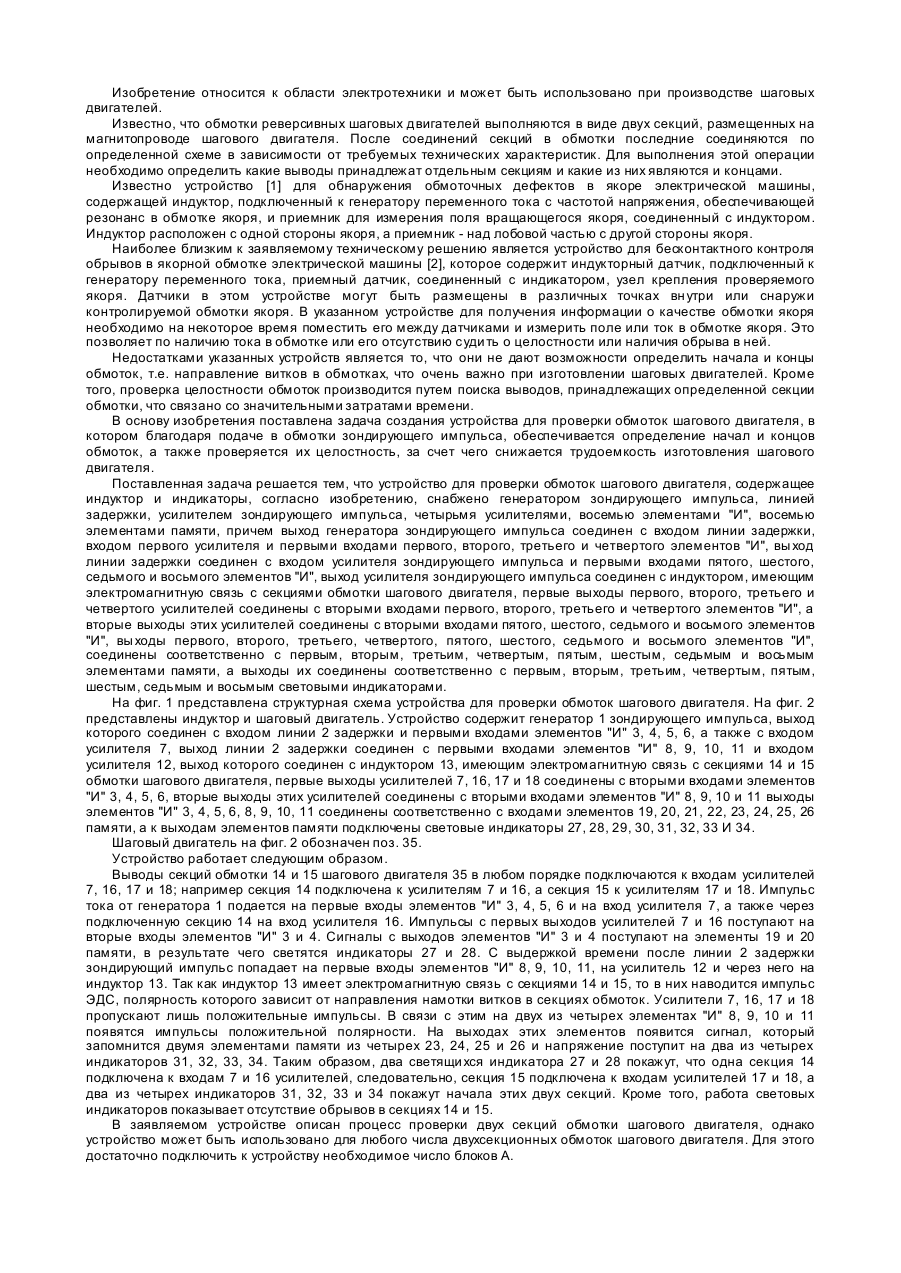
Устройство для проверки обмоток шагового двигателя, содержащее индуктор и индикаторы, отличающееся тем, что снабжено генератором зондирующего импульса, линией задержки, усилителем зондирующего импульса, четырьмя усилителями, восемью элементами "И", восемью элементами памяти, причем выход генератора зондирующего импульса соединен с входом линии задержки, входом первого усилителя и первыми входами первого, второго, третьего и...
Пристрій для формування залишків по модулю
Номер патенту: 612
Опубліковано: 15.12.1993
Автор: Черкаський Микола Вячеславович
МПК: H03M 7/14
Мітки: залишків, пристрій, модулю, формування
Формула / Реферат:
Формула изобретения1. Устройство для формирования остатков по модулю, содержащее (1-1) групп одноразрядных сумматоров (1= n/q, где n - разрядность числа, q - число сумматоров в группах) и блок свертки, причем прямые входы первого слагаемого одноразрядных сумматоров і-й группы (I = 1 - 1 - 1) соединены с входами соответствующих разрядов (і+1)-й группы информационного входа устройства, выход переноса к-го одноразрядного сумматора і-й...
Попередній патент: Спосіб ставлення стіни з блоків та блок для ставлення стіни
Наступний патент: Фільтр – прес
Випадковий патент: Спосіб визначення параметрів нелінійної дисипативної коливальної системи