Механізм зчеплення
Формула / Реферат
1. Механізм зчеплення містить маховик, кожух, що жорстко з'єднаний з маховиком, принаймні один ведений диск, шарнірно закріплений на кожусі з можливістю переміщення в аксіальному напрямі в межах довжини L, важелі, змонтовані на кожусі і шарнірно з'єднані з веденим диском, принаймні один ведений диск, ведений вал із шліцами, фрикційні накладки, з'єднані пружно з веденим диском з обох його боків, пружинні елементи, встановлені між кожухом і веденим диском, який відрізняється тим, що робочі поверхні маховика, веденого диска, фрикційних накладок виконані із виступами і заглибинами і мають принаймні по одному виступу і по одній заглибині, при цьому кожний виступ однієї з робочих поверхонь, що безпосередньо стикаються, виконаний з можливістю примикання відповідної заглибини іншої.
2. Механізм зчеплення за п. 1, який відрізняється тим, що виступи і заглибини робочих поверхонь маховика, веденого диска, фрикційних накладок розташовані почергово у вигляді концентричних кіл, якщо дивитися в аксіальному напрямі.
3. Механізм зчеплення за пп. 1, 2, який відрізняється тим, що фрикційна накладка виконана у вигляді суцільного кільця або у вигляді окремих елементів.
4. Механізм зчеплення за пп. 1-3, який відрізняється тим, що геометрична форма поперечного перерізу кожного виступу і заглибини робочих поверхонь маховика, веденого диска, фрикційних накладок виконана трикутною.
5. Механізм зчеплення за пп. 1-3, який відрізняється тим, що геометрична форма поперечного перерізу кожного виступу і заглибини робочих поверхонь маховика, веденого диска, фрикційних накладок виконана трапецієподібною.
6. Механізм зчеплення за пп. 1-3, який відрізняється тим, що геометрична форма поперечного перерізу кожного виступу і заглибини робочих поверхонь маховика, веденого диска, фрикційних накладок виконана принаймні хвилеподібною.
Текст
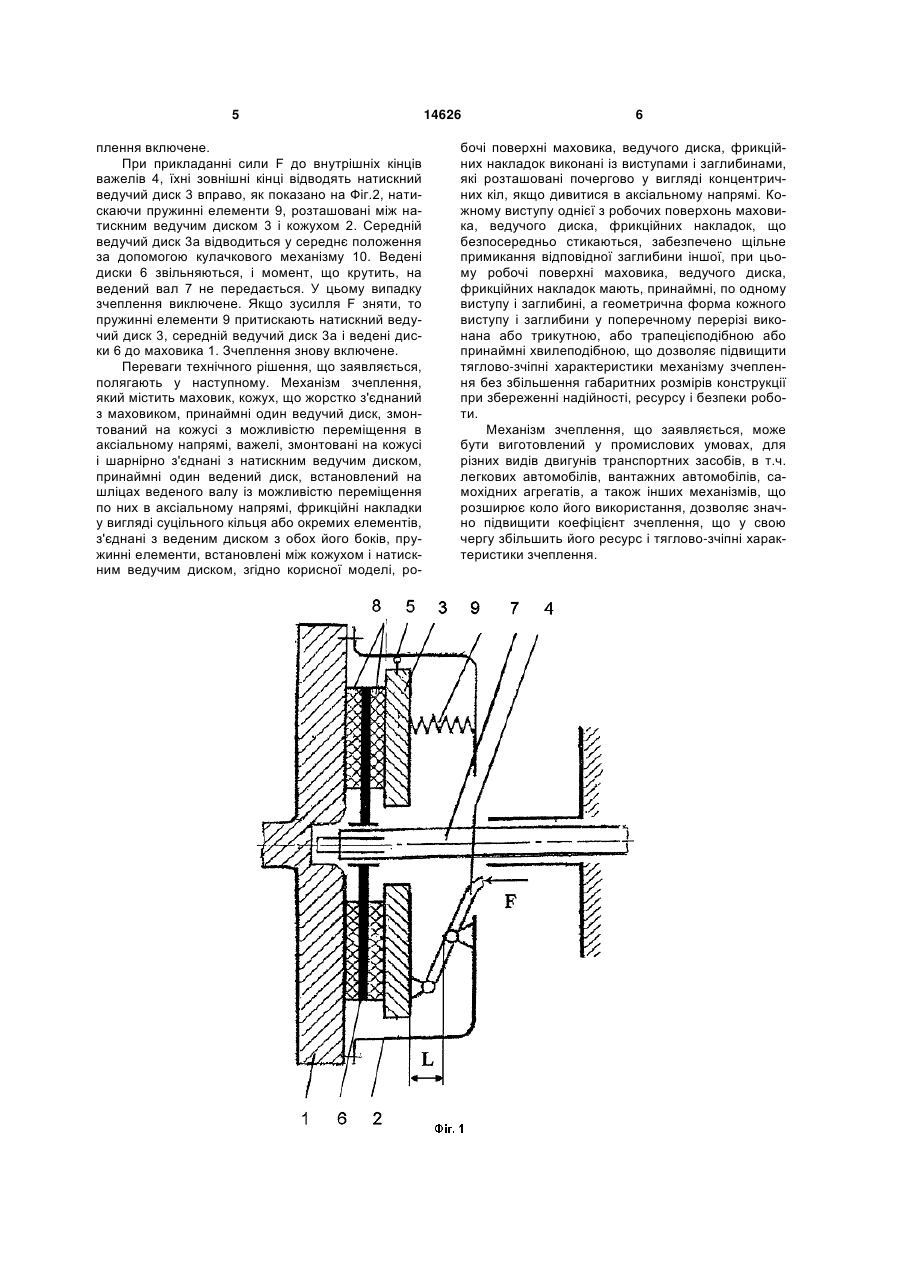
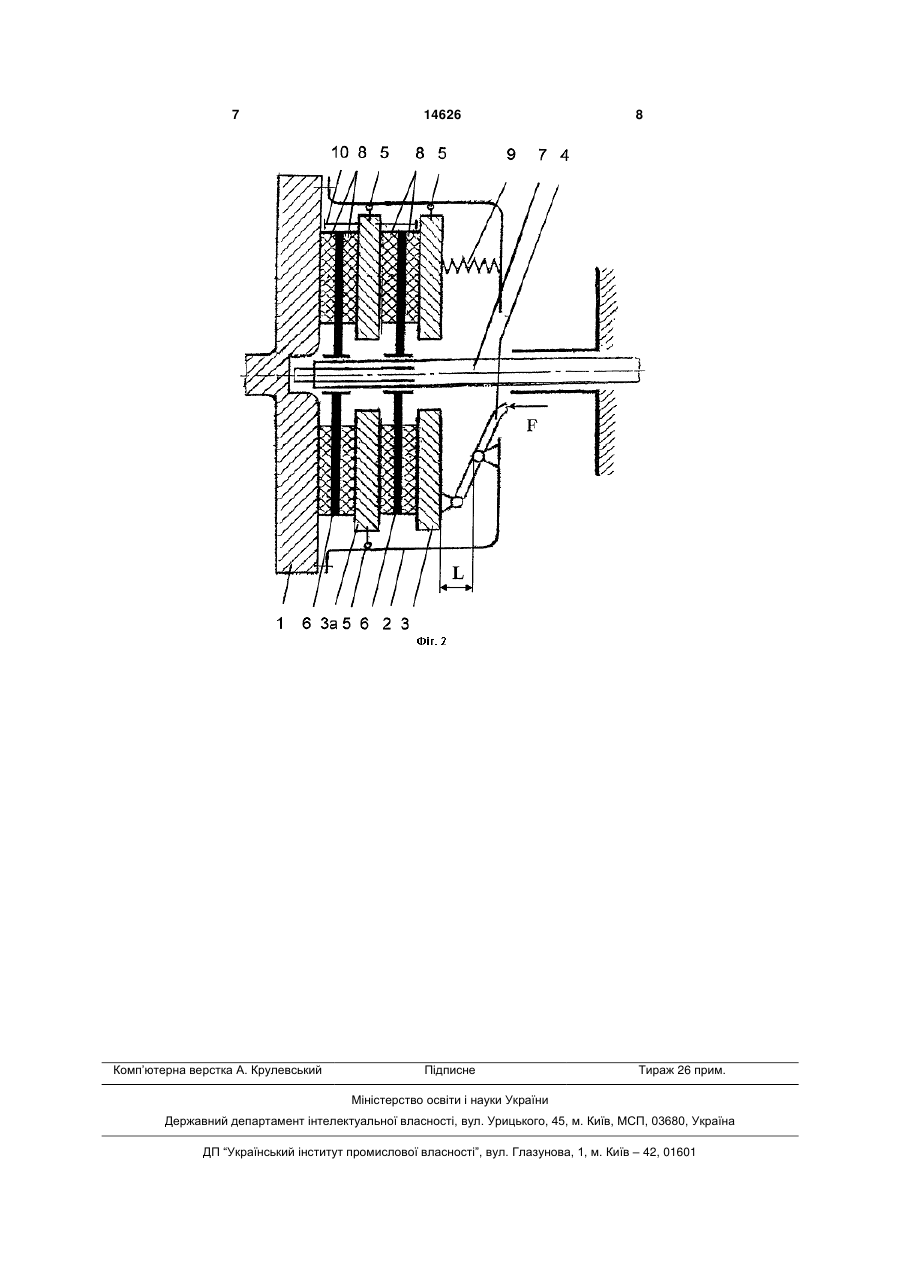
1. Механізм зчеплення містить маховик, кожух, що жорстко з'єднаний з маховиком, принаймні один ведений диск, шарнірно закріплений на кожусі з можливістю переміщення в аксіальному напрямі в межах довжини L, важелі, змонтовані на кожусі і шарнірно з'єднані з веденим диском, принаймні один ведений диск, ведений вал із шліцами, фрикційні накладки, з'єднані пружно з веденим диском з обох його боків, пружинні елементи, встановлені між кожухом і веденим диском, який відрізняється тим, що робочі поверхні маховика, веденого диска, фрикційних накладок виконані із виступами і заглибинами і мають принаймні по одному виступу і по одній заглибині, при цьому кожний виступ однієї з робочих поверхонь, що безпосередньо стикаються, виконаний з можливістю примикання відповідної заглибини іншої. 2. Механізм зчеплення за п. 1, який відрізняється U 2 (19) 1 3 никає потреба збільшення площі робочої поверхні зчеплення завдяки збільшенню діаметра й відповідно зовнішніх розмірів всіх елементів механізму зчеплення, що ускладнює, а іноді може унеможливити використання існуючої комплектації інших агрегатів. В основу корисної моделі поставлено задачу створення такої конструкції механізму зчеплення, шляхом удосконалення відомої, яка б дозволила підвищити його тяглово-зчіпні характеристики без збільшення габаритних розмірів конструкції механізму зчеплення при збереженні надійності, ресурсу і безпеки роботи. Поставлена задача досягається тим, що у механізмі зчеплення, який містить маховик, кожух, що жорстко з'єднаний з маховиком, принаймні один ведучий диск, змонтований на кожусі з можливістю переміщення в аксіальному напрямі, важелі, змонтовані на кожусі і шарнірно з'єднані з натискним ведучим диском, принаймні один ведений диск, встановлений на шліцах веденого валу із можливістю переміщення по них в аксіальному напрямі, фрикційні накладки у вигляді суцільного кільця або окремих елементів, з'єднані пружно з веденим диском з обох його боків, пружинні елементи, встановлені між кожухом і натискним ведучим диском, згідно корисної моделі, робочі поверхні маховика, ведучого диска, фрикційних накладок виконані із виступами і заглибинами, які розташовані почергово у вигляді концентричних кіл, якщо дивитися в аксіальному напрямі. Кожному виступу однієї з робочих поверхонь маховика, ведучого диска, фрикційних накладок, що безпосередньо стикаються, забезпечено щільне примикання відповідної заглибини іншої, при цьому робочі поверхні маховика, ведучого диска, фрикційних накладок мають, принаймні, по одному виступу і заглибині, а геометрична форма кожного виступу і заглибини у поперечному перерізі виконана або трикутною, або трапецієподібною або принаймні хвилеподібною. Корисна модель, що заявляється, пояснюється кресленнями. На Фіг.1 показана схема механізму зчеплення з одним ведучим диском, та одним веденим диском. Механізм зчеплення містить маховик 1, кожух 2, що жорстко з'єднаний з маховиком 1, натискний ведучий диск 3, змонтований на кожусі 2 з можливістю переміщення в аксіальному напрямі в межах довжини L, важелі 4, змонтовані на кожусі 2 і шарнірно з'єднані з натискним ведучим диском 3, шарніри 5, ведений диск 6, ведений вал 7 із шліцами, фрикційні накладки 8, з'єднані пружно з веденим диском 6 з обох його боків, пружинні елементи 9, встановлені між кожухом 2 і натискним ведучим диском 3. Робочі поверхні маховика 1, натискного ведучого диска 3, фрикційних накладок 8 виконані із виступами і заглибинами, які розташовані почергово у вигляді концентричних кіл, якщо дивитися в аксіальному напрямі. Кожному виступу однієї з робочих поверхонь, що безпосередньо стикаються, забезпечено щільне примикання відповідної заглибини іншої, при цьому робочі поверхні мають, принаймні, по одному виступу і заглибині, геомет 14626 4 рична форма кожного виступу і заглибини у поперечному перерізі виконана або трикутною, або трапецієподібною, або принаймні хвилеподібною. Заявлену корисну модель реалізують таким чином. Робота механізму зчеплення обумовлюється прикладенням сили F на внутрішні кінці важелів і полягає в наступному. Шарніри 5 дозволяють натискному ведучому диску 3 переміщатися в осьовому напрямку і сприймати момент, що крутить кожуха 2. У разі відсутності сили F натискний ведучий диск 3 і ведений диск 6 притискаються до маховика 1 пружинними елементами 9 і в результаті сил тертя момент, що крутить, від маховика 1 передається веденому диску 6, встановленому на шліцах веденого вала 7, через відповідно робочі поверхні фрикційних накладок 8,маховика 1, натискного ведучого диска 3, які виконані із нанесенням на них виступів і заглибин. У цьому випадку зчеплення включене. При прикладанні сили F на внутрішні кінці важелів 4, їхні зовнішні кінці відводять натискний ведучий диск 3 вправо, як показано на Фіг.1, натискаючи пружинні елементи 9, розташовані між натискним ведучим диском 3 і кожухом 2. Ведений диск 6 звільняється, і момент, що крутить, на ведений вал 7 не передається. У цьому випадку зчеплення виключене. Якщо зусилля F зняти, то пружинні елементи 9 притискають натискний ведучий диск 3 і ведений диск 6 до маховика 1. Зчеплення знову включене. В іншій формі виконання механізм зчеплення містить два диски, що ведуть та два ведених диски. Схема такого механізму наведена на Фіг.2. Схема подібна до схеми механізму зчеплення з одним ведучим диском, та одним веденим диском. Додатковим є наявність натискного диску 3а, середнього, другого веденого диску 6 з фрикційними накладками 8 та кулачкового механізму 10. Робочі поверхні маховика 1, дисків, що ведуть 3 і 3а, фрикційних накладок 9 виконані із виступами і заглибинами, які розташовані почергово у вигляді концентричних кіл, якщо дивитися в аксіальному напрямі. Кожному виступу однієї з робочих поверхонь, що безпосередньо стикаються, забезпечено щільне примикання відповідної заглибини іншої, при цьому робочі поверхні мають, принаймні, по одному виступу і заглибині, геометрична форма кожного виступу і заглибини у поперечному перерізі виконана або трикутною, або трапецієподібною, або принаймні хвилеподібною. Робота механізму зчеплення в такій формі виконання подібна до роботи механізму з одним ведучим диском, та одним веденим диском і полягає в наступному. Шарніри 5 дозволяють дискам, що ведуть 3 і 3а переміщатися в осьовому напрямку і сприймати момент, що крутить кожуха 2. У разі відсутності сили F диски, що ведуть 3 і 3а та ведені диски 6 притискаються до маховика 1 пружинними елементами 9 і в результаті сил тертя момент, що крутить, від маховика 1 через відповідні робочі поверхні фрикційних накладок 8 передається веденим дискам 6, встановленим на шліцах веденого вала 7 і самому веденому валу 7. У цьому випадку зче 5 плення включене. При прикладанні сили F до внутрішніх кінців важелів 4, їхні зовнішні кінці відводять натискний ведучий диск 3 вправо, як показано на Фіг.2, натискаючи пружинні елементи 9, розташовані між натискним ведучим диском 3 і кожухом 2. Середній ведучий диск 3а відводиться у середнє положення за допомогою кулачкового механізму 10. Ведені диски 6 звільняються, і момент, що крутить, на ведений вал 7 не передається. У цьому випадку зчеплення виключене. Якщо зусилля F зняти, то пружинні елементи 9 притискають натискний ведучий диск 3, середній ведучий диск 3а і ведені диски 6 до маховика 1. Зчеплення знову включене. Переваги технічного рішення, що заявляється, полягають у наступному. Механізм зчеплення, який містить маховик, кожух, що жорстко з'єднаний з маховиком, принаймні один ведучий диск, змонтований на кожусі з можливістю переміщення в аксіальному напрямі, важелі, змонтовані на кожусі і шарнірно з'єднані з натискним ведучим диском, принаймні один ведений диск, встановлений на шліцах веденого валу із можливістю переміщення по них в аксіальному напрямі, фрикційні накладки у вигляді суцільного кільця або окремих елементів, з'єднані з веденим диском з обох його боків, пружинні елементи, встановлені між кожухом і натискним ведучим диском, згідно корисної моделі, ро 14626 6 бочі поверхні маховика, ведучого диска, фрикційних накладок виконані із виступами і заглибинами, які розташовані почергово у вигляді концентричних кіл, якщо дивитися в аксіальному напрямі. Кожному виступу однієї з робочих поверхонь маховика, ведучого диска, фрикційних накладок, що безпосередньо стикаються, забезпечено щільне примикання відповідної заглибини іншої, при цьому робочі поверхні маховика, ведучого диска, фрикційних накладок мають, принаймні, по одному виступу і заглибині, а геометрична форма кожного виступу і заглибини у поперечному перерізі виконана або трикутною, або трапецієподібною або принаймні хвилеподібною, що дозволяє підвищити тяглово-зчіпні характеристики механізму зчеплення без збільшення габаритних розмірів конструкції при збереженні надійності, ресурсу і безпеки роботи. Механізм зчеплення, що заявляється, може бути виготовлений у промислових умовах, для різних видів двигунів транспортних засобів, в т.ч. легкових автомобілів, вантажних автомобілів, самохідних агрегатів, а також інших механізмів, що розширює коло його використання, дозволяє значно підвищити коефіцієнт зчеплення, що у свою чергу збільшить його ресурс і тяглово-зчіпні характеристики зчеплення. 7 Комп’ютерна верстка А. Крулевський 14626 8 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюCoupling mechanism
Автори англійськоюSteshenko Ruslan Oleksandrovych
Назва патенту російськоюМеханизм сцепления
Автори російськоюСтешенко Руслан Александрович
МПК / Мітки
МПК: F16D 13/64
Код посилання
<a href="https://ua.patents.su/4-14626-mekhanizm-zcheplennya.html" target="_blank" rel="follow" title="База патентів України">Механізм зчеплення</a>
Відцентрове зчеплення
Номер патенту: 28719
Опубліковано: 16.10.2000
Автор: Павлов Микола Димитрович
МПК: F02N 15/02
Мітки: зчеплення, відцентрове
Формула / Реферат:
Відцентрове зчеплення, яке має маховик (ведучий диск), ведений диск, кожух, віджимні пружини, яке відрізняється тим, що маховик (ведучий диск) забезпечений проушинами, в вісях яких шарнірно встановлені пелюстки, які являють собою пластини з фрикційним матеріалом, на торцях пластин встановлені кульки, при цьому пелюстки з’єднані між собою пружинами стиснення, ведений диск, встановленний на шлицях первинного вала, забезпечений фрикційним...
Пластина для кріплення фрикційних накладок веденого диска зчеплення
Номер патенту: 2792
Опубліковано: 16.08.2004
Автори: Міхно Анатолій Андрєєвіч, Тєрєхов Андрєй Ніколаєвіч
МПК: F16D 13/64
Мітки: веденого, диска, фрикційних, накладок, зчеплення, пластина, кріплення
Формула / Реферат:
1. Пластина для кріплення фрикційних накладок веденого диска зчеплення, що включає проріз від периферійної сторони пластини у напрямку центрального отвору фрикційних накладок, що поділяє пластину на дві частини, до кожної з яких прикріплено по одній кільцевій фрикційній накладці, яка відрізняється тим, що одна частина пластини виконана плоскою і вся її поверхня є опорою для однієї фрикційної накладки, а інша частина пластини виконана...
Механізм зчеплення автомобіля
Номер патенту: 34000
Опубліковано: 15.02.2001
Автори: Огризков Сергій Виталійович, Торлін Вадім Миколайович
МПК: F16D 13/64, F16D 13/00
Мітки: механізм, зчеплення, автомобіля
Текст:
...державний технічний університет 34000 на веденому валу. Радіальні сили що виникають, внаслідок їхньої симетрії відносно осі обертання, самоврівноважуються в матеріалі барабана 2 і ва лу 3, що дозволяє значно знизити їхню вагу і габаритні розміри. В конструкції буде відсутній натискний підшипник – найбільш ненадійний елемент. 2 34000 __________________________________________________________ ДП "Український інститут промислової...
Вузол дискових гальм
Номер патенту: 14625
Опубліковано: 15.05.2006
Автор: Стешенко Руслан Олександрович
МПК: F16D 65/12
Формула / Реферат:
1. Вузол дискових гальм, який містить корпус, гальмівний диск, дві гальмівні колодки, що розташовані з обох боків гальмівного диска і встановлені в гнізді корпусу, натискний елемент, встановлений в гнізді корпусу, пружні ущільнювальні накладки, розташовані у виточці натискного елемента, привід, перехідний елемент, фрикційні накладки, з'єднані жорстко з гальмівними колодками, який відрізняється тим, що робочі поверхні гальмівного диска,...
Механізм вимкнення зчеплення
Номер патенту: 39931
Опубліковано: 16.07.2001
Автори: Бір Хельмар, Кой Ад, Мебус Норберт
МПК: B60K 17/02, F16D 13/00
Мітки: механізм, зчеплення, вимкнення
Формула / Реферат:
1. Механизм выключения сцепления, в частности фрикционного сцепления, расположенного между двигателем и коробкой передач, включающий выжимной подшипник для приведения в действие исполнительных элементов сцепления, расположенный с опорой на несущую часть, расположенную со стороны коробки передач, на несущей части расположен, по меньшей мере, опорный элемент, воспринимающий усилие, действующее на выжимной подшипник при промежуточном включении...
Попередній патент: Вузол дискових гальм
Наступний патент: Спосіб багатофункціонального захисту електродвигунів
Випадковий патент: Апарат поглинаючий 73zw для залізничного транспорта