Привід кривошипний безбалансирний свердловинного штангового насоса

Формула / Реферат
Привід кривошипний безбалансирний свердловинного штангового насоса, що містить стійку з привідними кривошипами, забезпеченими натяжними шківами, напрямні шківи з перекинутими через них гнучкими ланками, один кінець яких зв'язаний з підвіскою колони насосних штанг, а інший через натяжний шків зв'язаний зі стійкою, утворюючи V-подібно розташовані витки, який відрізняється тим, що у площині обертання кривошипа центр обертання напрямного шківа і точка зв'язку зі стійкою гнучкої ланки розташовані на різних віддаленнях від центра обертання кривошипа, причому відношення цих віддалень складає не менше 1,1.
Текст
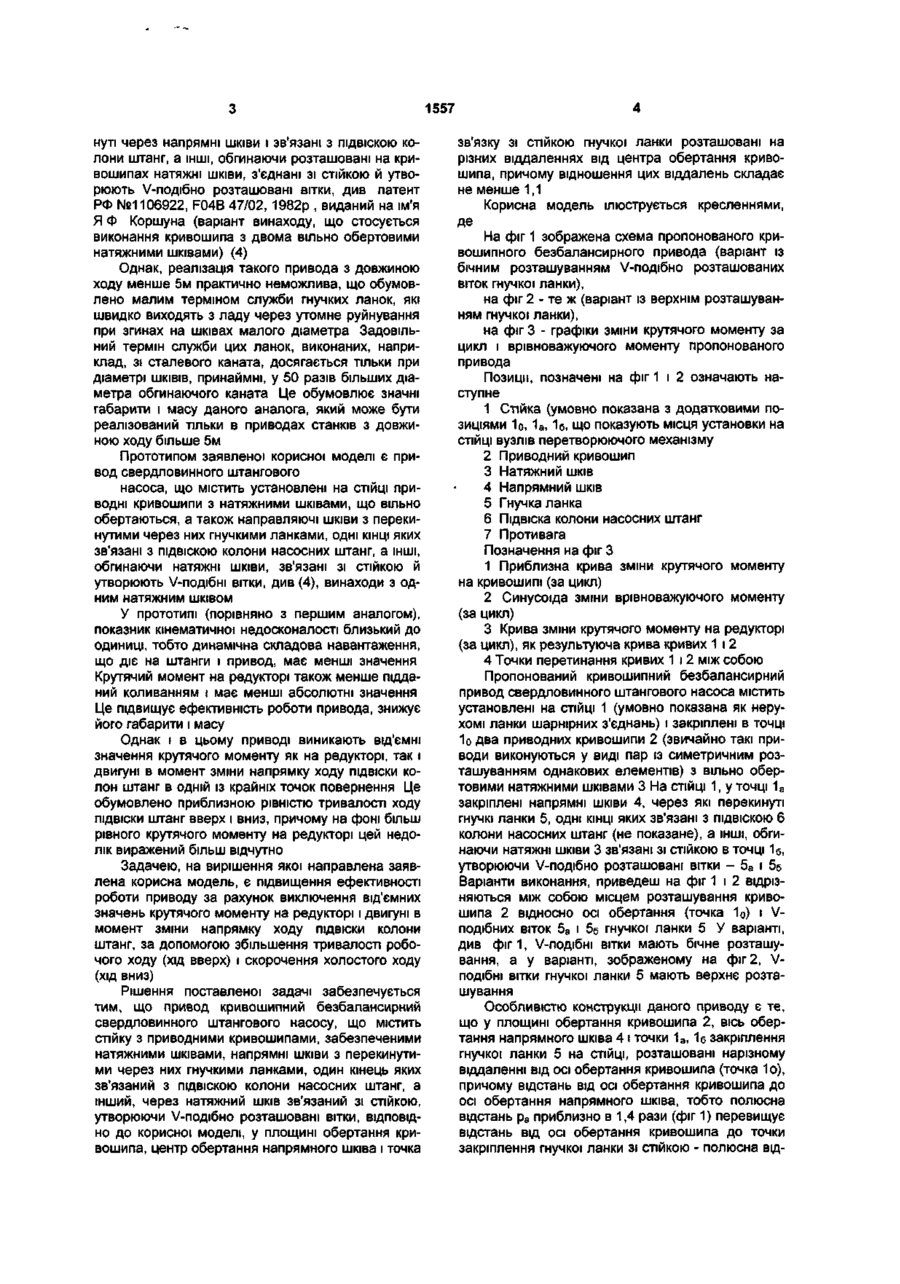
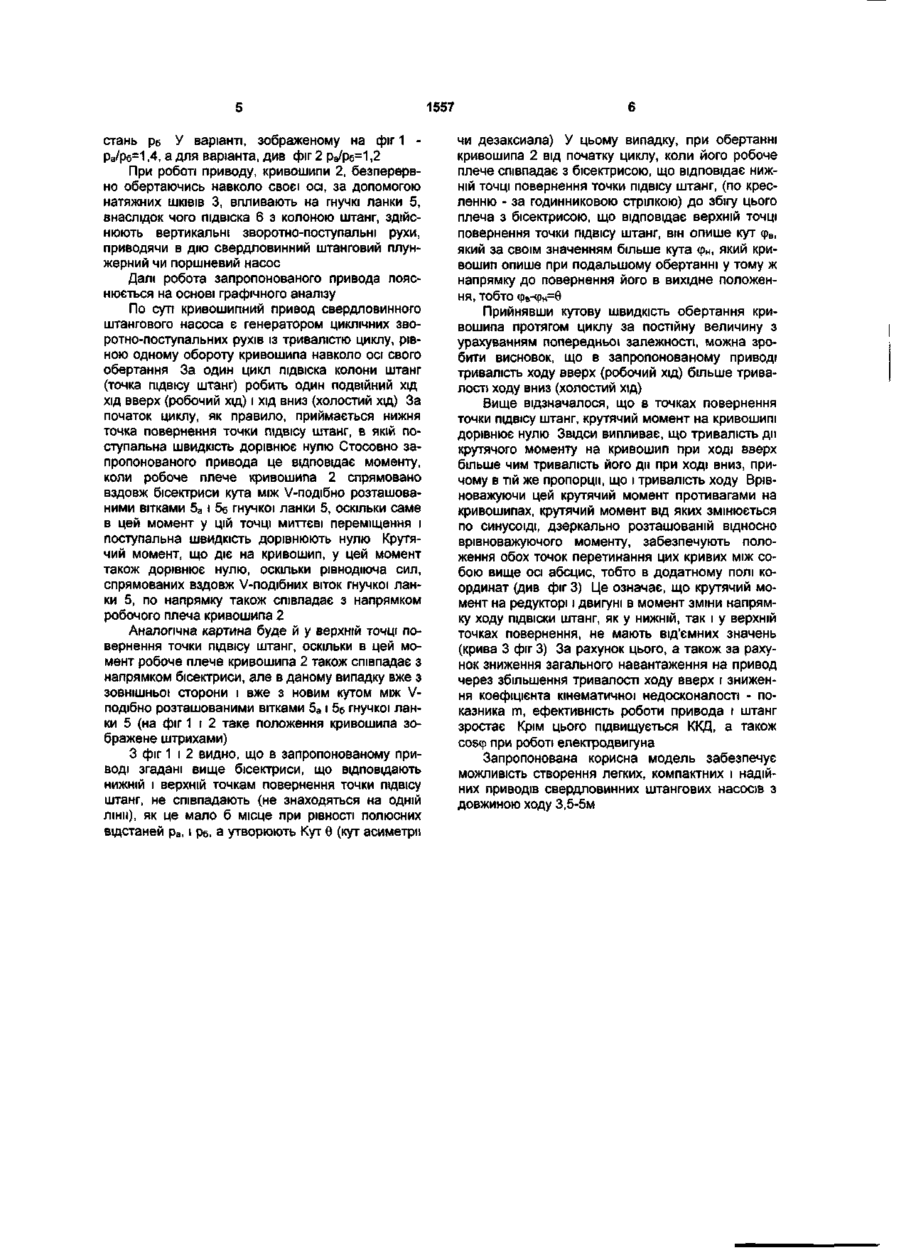
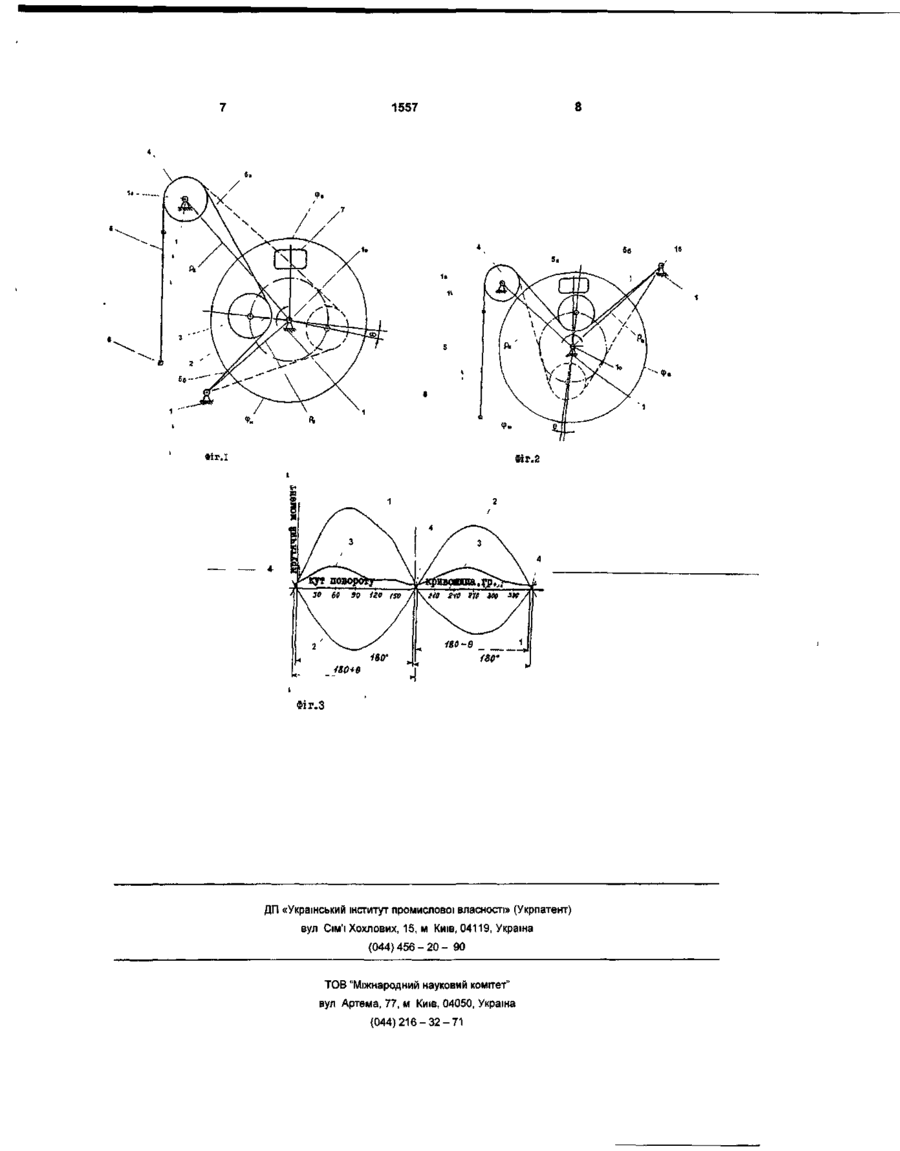
Привід кривошипний безбалансирний свердловинного штангового насоса, що містить стійку з привідними кривошипами, забезпеченими натяж яких зв'язані з ПІДВІСКОЮ колону штанг, а ІНШІ - із траверсою, з'єднаною за допомогою шатунів із кривошипами, див В М Муравьев «Эксплуатация нефтяных и газовых скважин», М Недра, 1978г стр 255-257 (1), журнал "Азербайджанское нефтяное хозяйство" (АНХ) №2 за 1970г, стр 42-44, (2) Одним з недоліків даного приводу є високий показник кінематичної недосконалості (показник «тм), що визначається як відношення фактичного максимального прискорення ПІДВІСКИ КОЛОНИ штанг до й прискорення при гармонічному законі руху, який, наприклад, у приводі СМБ 6-3-2500 складає приблизно 1,46 (див (2), фіг 2) і «Технология и техника добычи нефти и газа», М 1971 г, стр 318 « о показателе «т» » (3) Такий показник кінематичної недосконалості означає високу динамічну складову навантаження (при значній амплітуді коливання за цикл), яке діє на підвіску колони, що скорочує термін служби насосних штанг і привода ПІКОВІ значення коливань навантаження, що РІВНІСТЬ тривалості ходів ПІДВІСКИ штанг вверх і вниз за цикл також приводить до появлення від'ємних значень крутячого моменту на редукторі і двигуні При цьому крива, що характеризує зміну крутячого моменту за цикл від навантаження, що діє на підвіску колони штанг (або крива крутячого моменту на кривошипі) перетинає вісь абсцис також, як і синусоїдальна крива, що характеризує зміну врівноважуючого моменту, рівно через 180° повороту кривошипа При ідеальному збігу фаз цих моментів, обидві точки перетинання кожної з цих кривих осі абсцис ВІДПОВІДНО співпадають між собою (що відповідає нульовому значенню крутячого моменту на редукторі в цей момент) Однак, на практиці фази зміни крутячого моменту на кривошипі і зміни врівноважуючого моменту - не співпадають На графіку це відображається таким чином Одна з точок перетинання зазначених вище кривих виявляється вище осі абсцис, а інша - нижче цієї осі, тобто в області від'ємних значень крутячого моменту на редукторі Відомий також кривошипний безбалансирний привод, що містить розміщені на СТІЙЦІ приводні кривошипи з брусами, на яких установлені натяжні шківи, що вільно обертаються, з обгинаючими їх гнучкими ланками, одні КІНЦІ кожної з яких переки 1 Ю Ю о> 1557 нуті через напрямні шківи і зв'язані з ПІДВІСКОЮ КОЛОНИ штанг, а ІНШІ, обгинаючи розташовані на кривошипах натяжні шківи, з'єднані зі стійкою й утворюють V-подібно розташовані вітки, див патент РФ №1106922, F04B 47/02, 1982р , виданий на ім'я Я Ф Коршуна (варіант винаходу, що стосується виконання кривошипа з двома вільно обертовими натяжними шківами) (4) Однак, реалізація такого привода з довжиною ходу менше 5м практично неможлива, що обумовлено малим терміном служби гнучких ланок, які швидко виходять з ладу через утомне руйнування при згинах на шківах малого діаметра Задовільний термін служби цих ланок, виконаних, наприклад, зі сталевого каната, досягається тільки при діаметрі ШКІВІВ, принаймні, у 50 разів більших діаметра обгинаючого каната Це обумовлює значні габарити і масу даного аналога, який може бути реалізований тільки в приводах станків з довжиною ходу більше 5м Прототипом заявленої корисної моделі є привод свердловинного штангового насоса, що містить установлені на СТІЙЦІ приводні кривошипи з натяжними шківами, що вільно обертаються, а також направляючі шківи з перекинутими через них гнучкими ланками, одні КІНЦІ ЯКИХ зв'язані з ПІДВІСКОЮ колони насосних штанг, а ІНШІ, обгинаючи натяжні шківи, зв'язані зі стійкою й утворюють V-подібні вітки, див (4), винаходи з одним натяжним шківом У прототипі (порівняно з першим аналогом), показник кінематичної недосконалості близький до одиниці, тобто динамічна складова навантаження, що діє на штанги і привод, має менші значення Крутячий момент на редукторі також менше підданий коливанням і має менші абсолютні значення Це підвищує ефективність роботи привода, знижує його габарити і масу Однак і в цьому приводі виникають ВІД'ЄМНІ значення крутячого моменту як на редукторі, так і двигуні в момент зміни напрямку ходу ПІДВІСКИ колон штанг в одній із крайніх точок повернення Це обумовлено приблизною рівністю тривалості ходу ПІДВІСКИ штанг вверх і вниз, причому на фоні більш рівного крутячого моменту на редукторі цей недолік виражений більш відчутно Задачею, на вирішення якої направлена заявлена корисна модель, є підвищення ефективності роботи приводу за рахунок виключення від'ємних значень крутячого моменту на редукторі і двигуні в момент зміни напрямку ходу ПІДВІСКИ КОЛОНИ штанг, за допомогою збільшення тривалості робочого ходу (хід вверх) і скорочення холостого ходу (хід ВНИЗ) Рішення поставленої задачі забезпечується тим, що привод кривошипний безбалансирний свердловинного штангового насосу, що містить стійку з приводними кривошипами, забезпеченими натяжними шківами, напрямні шківи з перекинутими через них гнучкими ланками, один кінець яких зв'язаний з ПІДВІСКОЮ колони насосних штанг, а інший, через натяжний шків зв'язаний зі стійкою, утворюючи V-подібно розташовані вітки, ВІДПОВІДНО до корисної моделі, у площині обертання кривошипа, центр обертання напрямного шківа і точка зв'язку зі стійкою гнучкої ланки розташовані на різних віддаленнях від центра обертання кривошипа, причому відношення цих віддалень складає не менше 1,1 Корисна модель ілюструється кресленнями, де На фіг 1 зображена схема пропонованого кривошипного безбалансирного привода (варіант із бічним розташуванням V-подібно розташованих віток гнучкої ланки), на фіг 2 - те ж (варіант із верхнім розташуванням гнучкої ланки), на фіг 3 - графіки зміни крутячого моменту за цикл і врівноважуючого моменту пропонованого привода Позиції, позначені на фіг 1 і 2 означають наступне 1 Стійка (умовно показана з додатковими позиціями 1о, 1 а , 1б, що показують місця установки на СТІЙЦІ вузлів перетворюючого механізму 2 Приводний кривошип 3 Натяжний шків 4 Напрямний шків 5 Гнучка ланка 6 Підвіска колони насосних штанг 7 Противага Позначення на фіг З 1 Приблизна крива зміни крутячого моменту на кривошипі (за цикл) 2 Синусоїда зміни врівноважуючого моменту (за цикл) 3 Крива зміни крутячого моменту на редукторі (за цикл), як результуюча крива кривих 1 і 2 4 Точки перетинання кривих 1 і 2 між собою Пропонований кривошипний безбалансирний привод свердловинного штангового насоса містить установлені на СТІЙЦІ 1 (умовно показана як нерухомі ланки шарнірних з'єднань) і закріплені в точці 1о два приводних кривошипи 2 (звичайно такі приводи виконуються у виді пар із симетричним розташуванням однакових елементів) з вільно обертовими натяжними шківами 3 На СТІЙЦІ 1, у точці 1 а закріплені напрямні шківи 4, через які перекинуті гнучкі ланки 5, одні КІНЦІ ЯКИХ зв'язані з ПІДВІСКОЮ 6 колони насосних штанг (не показане), а ІНШІ, обгинаючи натяжні шківи 3 зв'язані зі стійкою в точці 1б, утворюючи V-подібно розташовані вітки - 5 а і 5б Варіанти виконання, приведеш на фіг 1 і 2 відрізняються між собою місцем розташування кривошипа 2 відносно осі обертання (точка 1о) і Vподібних віток 5 а і 5б гнучкої ланки 5 У варіанті, див фіг 1, V-подібні вітки мають бічне розташування, а у варіанті, зображеному на фіг 2, Vподібні вітки гнучкої ланки 5 мають верхнє розташування Особливістю конструкції даного приводу є те, що у площині обертання кривошипа 2, вісь обертання напрямного шківа 4 і точки 1 а , 1б закріплення гнучкої ланки 5 на СТІЙЦІ, розташовані нарізному віддаленні від осі обертання кривошипа (точка 1о), причому відстань від осі обертання кривошипа до осі обертання напрямного шківа, тобто полюсна відстань р а приблизно в 1,4 рази (фіг 1) перевищує відстань від осі обертання кривошипа до точки закріплення гнучкої ланки зі стійкою - полюсна від 1557 стань рб У варіанті, зображеному на фіг 1 ра/рб=1,4, а для варіанта, див фіг 2 ра/рб=1,2 При роботі приводу, кривошипи 2, безперервно обертаючись навколо своєї осі, за допомогою натяжних ШКІВІВ 3, впливають на гнучкі ланки 5, внаслідок чого підвіска 6 з колоною штанг, здійснюють вертикальні зворотно-поступальні рухи, приводячи в дію свердловинний штанговий плунжерний чи поршневий насос Далі робота запропонованого привода пояснюється на основі графічного аналізу По суті кривошипний привод свердловинного штангового насоса є генератором циклічних зворотно-поступальних рухів із тривалістю циклу, рівною одному обороту кривошипа навколо осі свого обертання За один цикл підвіска колони штанг (точка підвісу штанг) робить один подвійний хід хід вверх (робочий хід) І ХІД ВНИЗ (ХОЛОСТИЙ ХІД) За початок циклу, як правило, приймається нижня точка повернення точки підвісу штанг, в якій поступальна швидкість дорівнює нулю Стосовно запропонованого привода це відповідає моменту, коли робоче плече кривошипа 2 спрямовано вздовж бісектриси кута між V-подібно розташованими вітками 5 а і 5б гнучкої ланки 5, оскільки саме в цей момент у цій точці миттєві переміщення і поступальна швидкість дорівнюють нулю Крутячий момент, що діє на кривошип, у цей момент також дорівнює нулю, оскільки рівнодіюча сил, спрямованих вздовж V-подібних віток гнучкої ланки 5, по напрямку також співпадає з напрямком робочого плеча кривошипа 2 Аналогічна картина буде й у верхній точці повернення точки підвісу штанг, оскільки в цей момент робоче плече кривошипа 2 також співпадає з напрямком бісектриси, але в даному випадку вже з зовнішньої сторони і вже з новим кутом між Vподібно розташованими вітками 5 а і 5б гнучкої ланки 5 (на фіг 1 і 2 таке положення кривошипа зображене штрихами) З фіг 1 і 2 видно, що в запропонованому приводі згадані вище бісектриси, що відповідають нижній і верхній точкам повернення точки підвісу штанг, не співпадають (не знаходяться на одній лінії), ЯК це мало б місце при рівності полюсних відстаней р а , і Рб, а утворюють Кут 6 (кут асиметрії чи дезаксиала) У цьому випадку, при обертанні кривошипа 2 від початку циклу, коли його робоче плече співпадає з бісектрисою, що відповідає нижній точці повернення точки підвісу штанг, (по кресленню - за годинниковою стрілкою) до збігу цього плеча з бісектрисою, що відповідає верхній точці повернення точки підвісу штанг, він опише кут фв, який за своїм значенням більше кута фн, який кривошип опише при подальшому обертанні у тому ж напрямку до повернення його в вихідне положення, ТОбтО фв-фн=0 Прийнявши кутову швидкість обертання кривошипа протягом циклу за постійну величину з урахуванням попередньої залежності, можна зробити висновок, що в запропонованому приводі тривалість ходу вверх (робочий хід) більше тривалості ходу вниз (холостий хід) Вище відзначалося, що в точках повернення точки підвісу штанг, крутячий момент на кривошипі дорівнює нулю Звідси випливає, що тривалість дії крутячого моменту на кривошип при ході вверх більше чим тривалість його дії при ході вниз, причому в тій же пропорції, що і тривалість ходу Врівноважуючи цей крутячий момент противагами на кривошипах, крутячий момент від яких змінюється по синусоїді, дзеркально розташованій відносно врівноважуючого моменту, забезпечують положення обох точок перетинання цих кривих між собою вище осі абсцис, тобто в додатному полі координат (див фіг 3) Це означає, що крутячий момент на редукторі і двигуні в момент зміни напрямку ходу ПІДВІСКИ штанг, як у нижній, так і у верхній точках повернення, не мають від'ємних значень (крива 3 фіг 3) За рахунок цього, а також за рахунок зниження загального навантаження на привод через збільшення тривалості ходу вверх і зниження коефіцієнта кінематичної недосконалості - показника т , ефективність роботи привода і штанг зростає Крім цього підвищується ККД, а також соэф при роботі електродвигуна Запропонована корисна модель забезпечує можливість створення легких, компактних і надійних приводів свердловинних штангових насосів з довжиною ходу 3,5-5м 1557 5б ФІГ.І Фіг.2 ФІГ.З ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна (044) 456 - 20 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71 16
ДивитисяДодаткова інформація
Автори англійськоюKorshun Yakiv Fomych
Автори російськоюКоршун Яков Фомич
МПК / Мітки
МПК: F04B 47/02
Мітки: свердловинного, безбалансирний, насоса, штангового, привід, кривошипний
Код посилання
<a href="https://ua.patents.su/4-1557-privid-krivoshipnijj-bezbalansirnijj-sverdlovinnogo-shtangovogo-nasosa.html" target="_blank" rel="follow" title="База патентів України">Привід кривошипний безбалансирний свердловинного штангового насоса</a>
Привід свердловинного штангового насосу

Номер патенту: 10162
Опубліковано: 30.09.1996
Автор: Коршун Яков Фоміч
МПК: F04B 47/02
Мітки: свердловинного, штангового, насосу, привід
Формула / Реферат:
1.Привод скважинного штангового насоса, содержащий размещенные на стойке редуктор с кривошипами на ведомом валу и направляющие шкивы с перекинутыми через них гибкими звеньями, один конец каждого из которых связан с подвеской колонны штанг, отличающийся тем, что, с целью повышения производительности и КПД, каждый кривошип снабжен по меньшей мере одним свободно вращающимся относительно своей оси натяжным шкивом, охваченным гибким звеном с...
Замковий вузол свердловинного штангового насоса

Номер патенту: 20307
Опубліковано: 15.07.1997
Автори: Рилов Борис Михайлович, Лилак Микола Миколаєвич, Копадзе Сергій Анатолійович, Цвик Богдан Миколаєвич
МПК: F04B 47/02
Мітки: свердловинного, замковий, штангового, вузол, насоса
Формула / Реферат:
Замковий вузол свердловинного штангового насоса, який містить прохідний опорний конус, укріплений на колоні пасосно-компресорних труб, посадковий прохідний конус, укріплений на циліндрі насоса і елемент фіксації посадкового конуса разом із штанговим насосом в опорному конусі, який відрізняється тим, що посадковий конус разміщено під приймальним клапаном насоса і на його конусній частині встановлено ущільнюючий елемент, причому до...
Пакерний замок рилова б.м. – попівчака с.і. для свердловинного штангового насоса

Номер патенту: 24160
Опубліковано: 07.07.1998
Автори: Лилак Микола Миколайович, Рилов Борис Михайлович, Попівчак Сергій Іванович
МПК: E21B 33/12
Мітки: с.і, замок, пакерний, рилова, штангового, попівчака, свердловинного, б.м, насоса
Формула / Реферат:
Пакерний замок для свердловинного штангового насоса, який вміщує опорну трубу, встановлений в ній і розміщений над циліндром насоса посадковий вузол, який включає з'єднаний з циліндром трубчатий корпус, до верхньої частини якого послідовно прикріплені навантажувальне кільце і викидна клітка штангового насоса, послідовно розміщені під навантажувальним кільцем і з можливістю осьового переміщення ущільнюючий еластичний елемент, посадковий конус,...
Гідромеханічно-пакерний замок свердловинного штангового насоса

Номер патенту: 30515
Опубліковано: 15.11.2000
Автори: Кононюк Борис Андронович, Васьків Олександр Васильович, Копач Ігор Васильович, Лилак Микола Миколайович, Рилов Борис Михайлович
МПК: E21B 33/12
Мітки: гідромеханічно-пакерний, штангового, свердловинного, замок, насоса
Формула / Реферат:
Гідромеханічно-пакерний замок свердловинного штангового насоса, який містить трубний корпус з розміщеними на ньому ззовні опорним конусом, шліпсами, які встановлені під опорним конусом і зв'язані тягою з нижчерозміщеним вантажем, а над вантажем встановлена пружина, пакеруючий пристрій, який містить вільно встановлений на трубному корпусі опорний конус, зв'язану з трубним корпусом верхню опору і розміщений між опорним конусом і верхньою опорою...
Віцентровий двоступеневий пісочногазовий сепаратор свердловинного штангового насоса
Номер патенту: 20447
Опубліковано: 15.07.1997
Автори: Батура Віктор Васильович, Рубан Ігор Григорович, Цвик Богдан Миколайович, Рилов Борис Михайлович, Копадзе Сергій Анатолійович, Бич Володимир Іванович
МПК: E21B 43/34
Мітки: пісочногазовий, насоса, штангового, двоступеневий, віцентровий, сепаратор, свердловинного
Формула / Реферат:
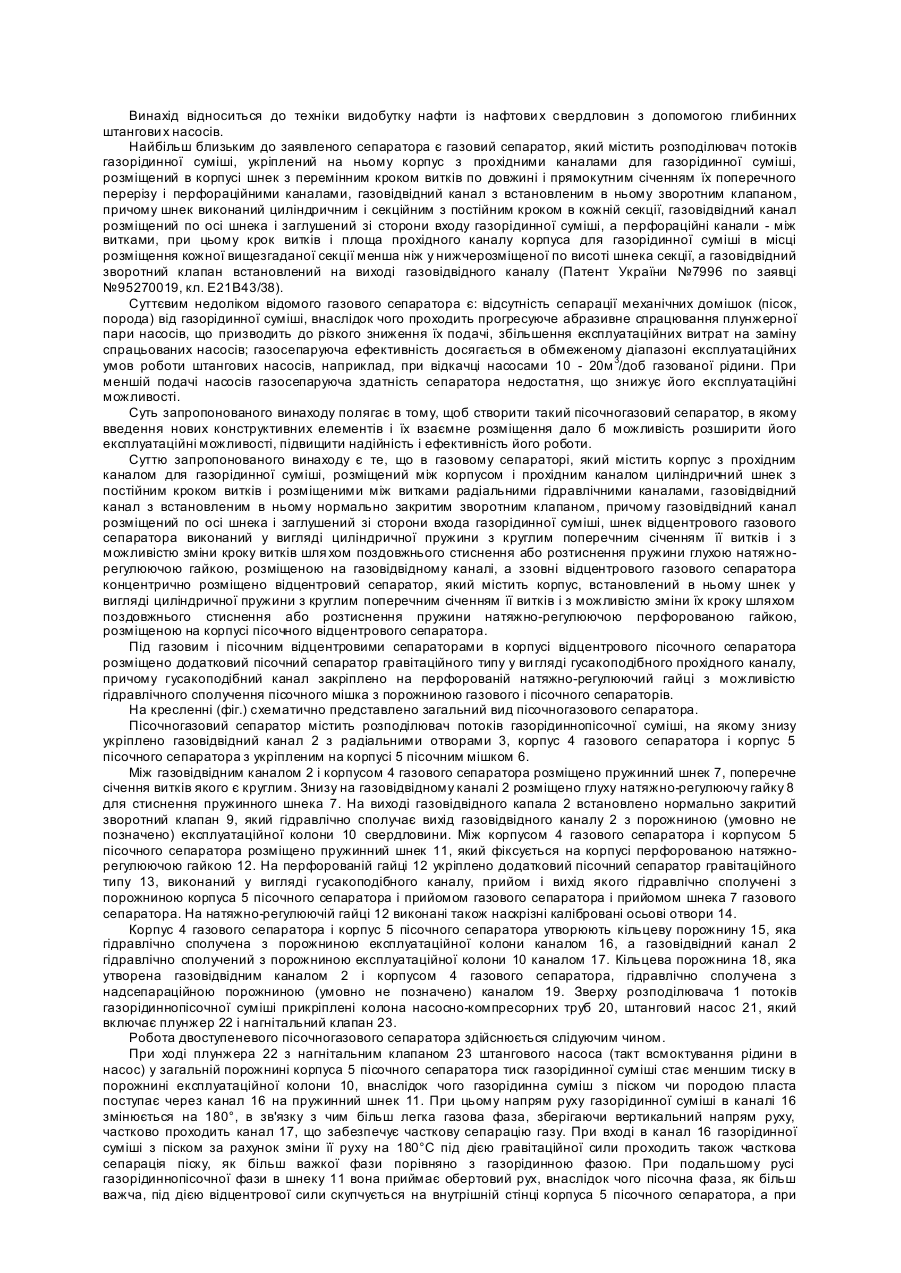
1. Відцентровий двоступеневий пісочногазовий сепаратор свердловинного штангового насоса, який містить відцентровий газовий сепаратор, що включає розподілювач потоків газорідинної суміші, корпус з прохідним каналом для газорідинної суміші, який укріплений на розподілювачі потоків газорідинної суміші, розміщений в корпусі циліндричний шнек з постійним кроком витків по його довжині, перфораційні канали, які розміщені між витками шнека,...
Попередній патент: Композиція фенілсульфонілсечовинних гербіцидів з антидотами та спосіб захисту культурних рослин від побічних фітотоксичних ефектів фенілсульфонілсечовинних гербіцидів
Наступний патент: Легкий багатоцільовий вертоліт
Випадковий патент: Пристрій для транспортування і очистки коренебульбоплодів