Наземний радіолокаційний висотомір
Номер патенту: 15947
Опубліковано: 30.06.1997
Автори: Бахвалов Борис Миколайович, Жуков Сергій Анатолійович, Родін Олександр Валерійович
Формула / Реферат
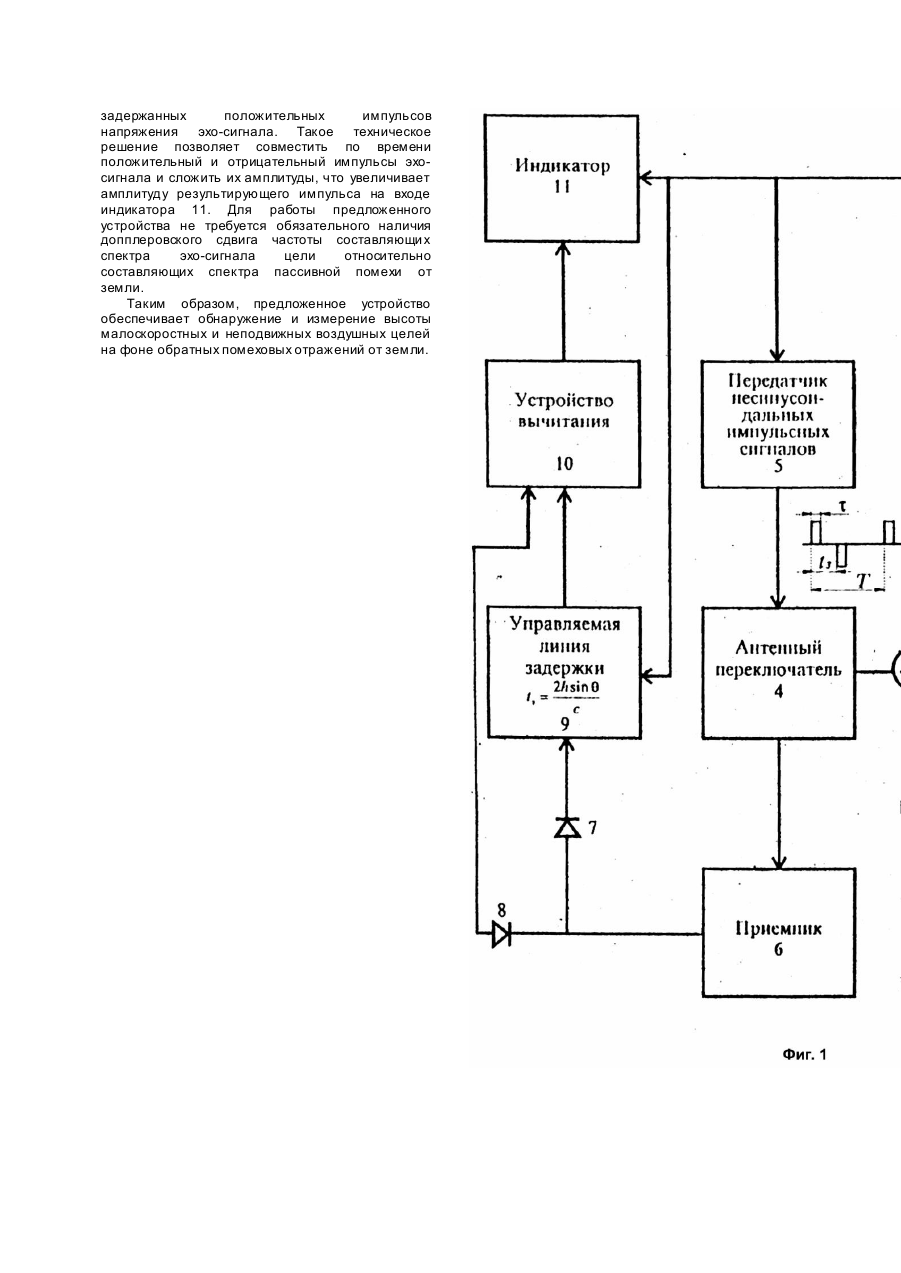
Наземный радиолокационный высотомер, содержащий приемо-передающую антенну с антенным переключателем и устройством качания ее по углу места, соединенную последовательно с датчиком угла места и индикатором РЛС, передатчик и приемник, соединенные антенным переключателем с приемо-передающей антенной, отличающийся тем, что на выходе приемника установлены два широкополосных диода противоположной полярности, один из которых связан со входом устройства вычитания, а другой - со входом управляемой линии задержки, и выход линии задержки соединен со вторым входом устройства вычитания, выход которого соединен с индикатором, а входы управления линии задержки и передатчика соединены с выходом датчика угла места.
Текст
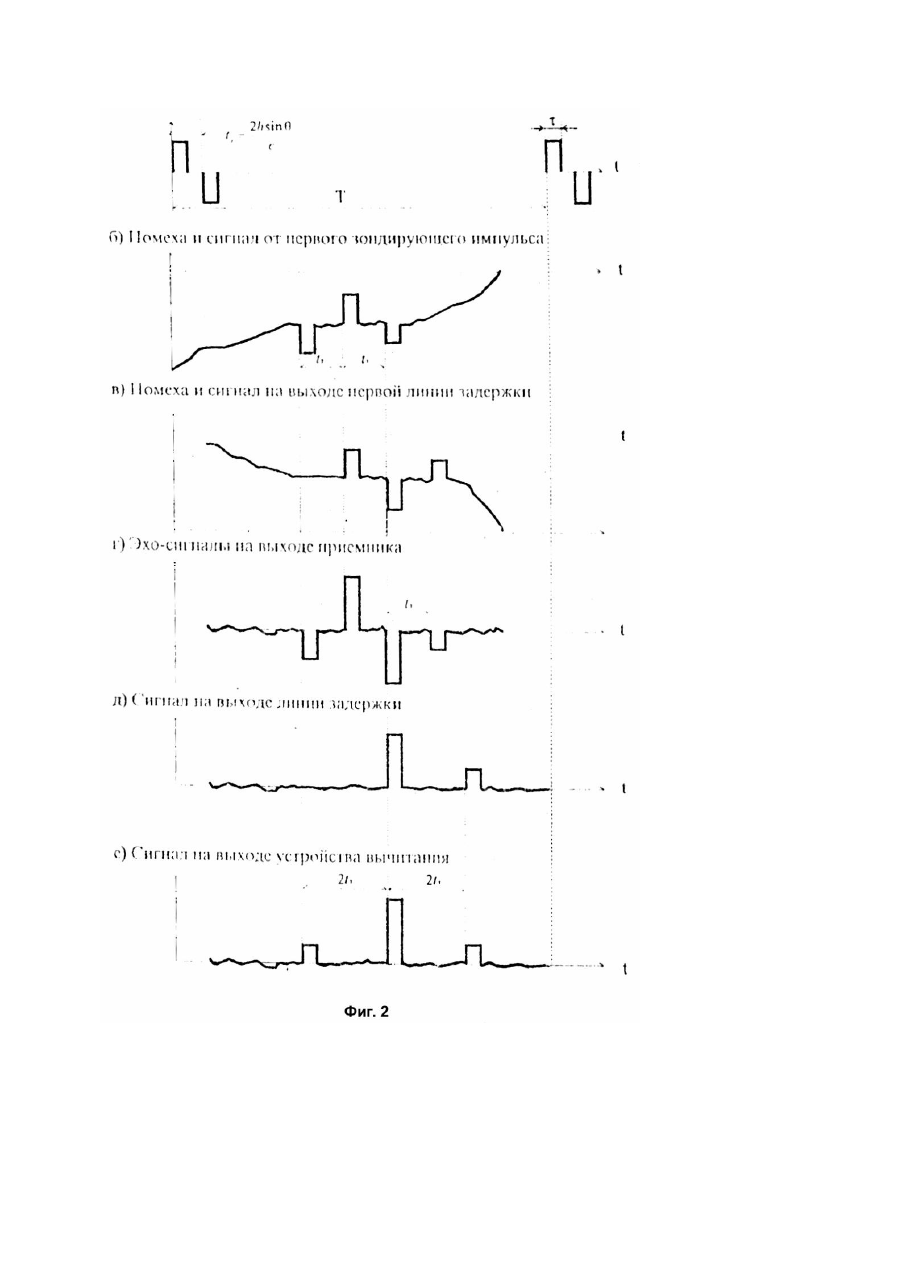
Изобретение относится к области радиолокации и может быть использовано для обнаружения малоскоростных воздушных целей на фоне обратных помеховых отражений от земной поверхности и измерения высоты таких целей. В качестве прототипа выбрана РЛС определения высоты с качающейся диаграммой направленности. Зондирующий сигнал такой РЛС представляет собой периодическую последовательность радиоимпульсов на стабильной несущей частоте микроволнового диапазона. В состав прототипа входят следующие элементы: приемо-передающая антенна с устройством качания ее по углу места и датчиком угла места, который связан с индикатором РЛС; антенный переключатель, переключающий антенну с передачи на прием, передатчик зондирующи х сигналов; приемник эхо-сигналов целей и индикатор дальность-высота. Определение угла места цели в прототипе осуществляется путем непрерывного механического качания в вертикальной плоскости антенны с узкой по углу места диаграммой направленности. При этом угол места цели определяют по угломестному положению антенны в момент приема эхо-сигнала цели. Для защиты от пассивных помех в прототипе может быть использована описанная выше система СДЦ. Хотя такая система не указана на схеме, но эта система обычно используется в известных промышленных реализациях прототипа. Высоту цели в прототипе определяют по результату измерения угла места и наклонной дальности цели. Недостатком прототипа является то, что такая РЛС не обеспечивает обнаружения и измерения высоты малоскоростных и неподвижных воздушных целей на фоне обратных помеховых отражений от земли даже, если в состав прототипа будет включена известная система СДЦ. В основу изобретения поставлена задача устранения отмеченных недостатков аналога и прототипа и обеспечения возможности обнаружения и измерения угла места малоскоростных или неподвижных воздушных целей на фоне обратных помеховых отражений от земной поверхности. Решение этой задачи достигается благодаря тому, что в наземном радиолокационном высотомере, содержащем передатчик, приемник, приемо-передающую антенну с антенным переключателем, устройство угломестного качания антенны с датчиком угла места и индикатор, предусмотрены следующие отличия: передатчик и антенна выполнены для излучения несинусоидальных импульсных сигналов в виде периодической последовательности пары разнополярных радиоволновых видеоимпульсов длительностью 1 не и менее без несущей частоты, время запаздывания которых друг относительно друга равно где - время запаздывания зондирующих разнополярных импульсов в паре; - высота подъема антенны над землей; - угол наклона оси антенны; - скорость света, на выходе приемника установлены два широкополосных диода противоположной полярности, один из которых связан со входом устройства вычитания, а другой - со входом управляемой линии задержки, время задержки которой равно выход линии задержки связан со вторым входом устройства вычитания, выход которого связан с индикатором, а входы управления линии задержки и передатчика связаны с выходом датчика угла места. При этом период следования зондирующих сигналов такой же, как и у прототипа. На фиг.1 представлена упрошенная структурная схема предложенного устройства, а также условно показаны приемо-передающая антенна, цель, поверхность земли, упрощенная эпюра зондирующего сигнала, и лучи радиоволн эхо-сигналов цели и пассивной помехи от земли. На фиг.2а, б, в, г, д, е условно показаны эпюры зондирующего сигнала, пассивной помехи и эхосигнала от первого (положительного) зондирующего импульса, пассивной помехи эхосигнала от второго (отрицательного) зондирующего импульса, напряжений сигнала на выходах приемника, линии задержки и устройства вычитания. В состав структурной схемы предложенного устройства на фиг.1 входят следующие элементы: приемо-передающая антенна 1 с устройством качания антенны по углу места 2 и датчиком угла места 3; антенный переключатель 4 для подключения антенны к передатчику при излучении зондирующи х импульсов и к приемнику - при приеме сигналов; передатчик несинусоидальных импульсных сигналов 5, вход управления которого связан с выходом датчика угла места 3; приемник 6 для приема несинусоидальных эхо-сигналов; два широкополосных диода 7, 8, подключенных к выходу приемника в противоположной полярности (диод 7 пропускает положительные импульсы эхосигнала, а диод 8 - отрицательные импульсы, то есть эти диоды служат для разделения положительных и отрицательных импульсов эхосигнала); управляемая линия задержки 9, время задержки которой определено формулой (1) и изменяется пропорционально при качании антенны по углу места (эта линия задерживает только положительные импульсы эхо-сигнала); устройство вычитания 10 для вычитания напряжения отрицательных импульсов эхо-сигнала с выхода диода 8 из напряжения положительных импульсов, задержанных линией задержки; индикатор 11 для визуального наблюдения импульсов эхо-сигналов и отсчета высоты и дальности цели. Физическая сущность и принцип действия предложенного устройства поясняются следующим. Антенна РЛС излучает радиоволны в виде периодической последовательности пары разнополярных видеоимпульсов наносекундной длительности с периодом следования без несущей частоты. Первый зондирующий импульс пары положительный, а второй - отрицательный и запаздывает на время относительно первого, Это время определено формулой (1) и изменяется при изменении угла наклона антенны Поэтому вход управления передатчика5 связан с выходом датчика угла места 3. Эпюра зондирующего сигнала условно показана на фиг.2а. В предложенном устройстве использовано известное свойство несинусоидальных импульсных сигналов изменять полярность импульса при отражении от земли или цели, а также то, что длительность импульсов t очень мала и зачастую имеется возможность разрешить по времени импульсы прямых и отраженных от земли эхо-сигналов цели. Радиоволны от антенны до цели и обратно распространяются следующими четырьмя возможными путями: 1)антенна - цель - антенна; 2) антенна - цель - земля - антенна; 3) антенна - земля - цель - антенна; 4) антенна - земля - цель - земля - антенна. Самым коротким является первый путь. На втором и третьем пути время запаздывания сигнала одинаково и больше времени запаздывания на первом пути на величину определяемую формулой (1). Самым длинным является четвертый путь, на котором время запаздывания больше на чем на втором или третьем пути. В результате одному положительному зондирующему импульсу будет соответствова ть три импульса эхо-сигнала цели; первый отрицательный импульс для первого пути, второй положительный импульс для второго и третьего пути вместе, и третий отрицательный импульс для четвертого пути. Помеховый сигнал от поверхности земли для первого положительного зондирующего импульса будет представлять собой протяженный сигнал отрицательной полярности длительностью где - диаметр области, "засвеченной" помеховыми отражениями от земли. Эпюра помехи и сигнала для первого положительного зондирующего импульса приближенно показана на фиг.2б. Для второго отрицательного зондирующего импульса полярность помехи и сигнала будет противоположной, чем для положительного зондирующего импульса. Этот сигнал будет запаздывать на время по сравнению с сигналом на фиг.2б и показан на фиг.2в. При приеме сигналы на эпюрах фиг.2б, в складываются. В результате пассивная помеха от земли будет подавлена, а эхо-сигнал на выходе приемника 6 будет выглядеть примерно так, как показано на фиг.2г. Широкополосные диоды 7, 8 разделяют положительные и отрицательные импульсы эхосигналов на выходе приемника 6. После этого положительные импульсы эхо-сигнала задерживаются на время линией задержки 9 и будут выглядеть примерно так, как показано на фиг. 2д. Устройство вычитания 10 вычитает отрицательные импульсы эхо-сигнала цели из задержанных линией задержки 9 положительных импульсов, после чего напряжение эхо-сигнала на выходе устройства вычитания 10 будет выглядеть примерно так, как показано на фиг.2е. То есть диоды 7, 8, линия задержки 9 и устройство вычитания 10 необходимы для объединения положительного и отрицательного импульсов эхосигнала в один импульс большей амплитуды, что повышает вероятность обнаружения цели и отношение сигнал/шум. Использование второго отрицательного импульса зондирующего сигнала и задержка его на время относительно первого положительного импульса необходимы для подавления пассивных помех от земли и увеличения эхо-сигнала цели. При этом пассивная помеха от второго отрицательного зондирующего импульса подавляет пассивную помеху о т первого положительного импульса, а эхо-сигнал цели не ослабляется, а увеличивается. В предложенном устройстве принципиально необходимо использовать несинусоидальные импульсные сигналы наносекундной длительности так обычные радиоимпульсные сигналы имеют микросекундную длительность и не могут быть разрешены для прямых и отраженных от земли радиоволн. Таким образом, предложенное устройство может быть реализовано, а указанные выше отличительные признаки являются существенными и принципиально необходимы для реализации устройства. Основные элементы предложенного устройства, показанные на структурной схеме фиг.1, выполнены следующим образом. Антенна 1, передатчик 5 и приемник 6 выполнены для излучения и приема несинусоидальных импульсных сигналов в виде видеоимпульсов длительностью 1нс и менее без несущей частоты, а форма зондирующего сигнала условно показана на фиг.2а. Физические основы и принципы построения таких систем известны и описаны в литературе. Антенный переключатель 4 закорачивает вход приемника во время передачи зондирующего импульса. Устройства качания антенны 2 с датчиком угла места 3 и индикатор 11 не отличаются от соответствующи х устройств прототипа. Диоды 7, 8 и устройство вычитания 10 должны иметь очень широкую полосу пропускания порядка ГГц. Управляемая линия задержки 9 может быть выполнена в виде длинной линии, длину которой изменяют пропорционально где - угол наклона оси качающейся по углу места антенны. Требуемая длина такой линии сравнительно невелика, При этом отпадает необходимость использовать сложную и дорогую ультразвуковую линию задержки. Динамика работы предложен ного устройства осуществляется следующим образом. Антенну 1 качают по углу места Передатчик 5 формирует, а антенна 1 излучает несинусоидальный зондирующий сигнал в виде периодической последовательности пары разнополярных видеоимпульсов длительностью 1нс и менее без несущей частоты, время запаздывания которых друг относительно друга равно и зависит от угла наклона оси антенны. Радиоволны от антенны до цели и обратно распространяются четырьмя указанными выше путями. В результате одному зондирующему импульсу буде т соответствовать три импульса эхосигнала. Пассивная помеха от земли от второго отрицательного зондирующего импульса будет подавлять пассивную помеху от первого положительного зондирующего импульса. В результате на выходе приемника пассивные помехи от земли будут подавлены, а импульсы эхо-сигналов от первого и второго зондирующи х импульсов частично сложатся. Широкополосные диоды 7, 8 разделяют положительные и отрицательные видеоимпульсы эхо-сигнала с выхода приемника 6. После этого положительные импульсы эхо-сигнала задерживаются линией задержки 9 на время , а устройство вычитания 10 вычитает отрицательные импульсы из задержанных положительных импульсов напряжения эхо-сигнала. Такое техническое решение позволяет совместить по времени положительный и отрицательный импульсы эхосигнала и сложить их амплитуды, что увеличивает амплитуду результирующего импульса на входе индикатора 11. Для работы предложенного устройства не требуется обязательного наличия допплеровского сдвига частоты составляющи х спектра эхо-сигнала цели относительно составляющих спектра пассивной помехи от земли. Таким образом, предложенное устройство обеспечивает обнаружение и измерение высоты малоскоростных и неподвижных воздушных целей на фоне обратных помеховых отражений от земли.
ДивитисяДодаткова інформація
Назва патенту англійськоюSurface radar altimeter
Автори англійськоюZhukov Serhii Anatoliiovych, Bakhvalov Borys Mykolaiovych, Rodin Oleksandr Valeriiovych
Назва патенту російськоюНаземный радиолокационный высотомер
Автори російськоюЖуков Сергей Анатольевич, Бахвалов Борис Николаевич, Родин Александр Валериевич
МПК / Мітки
МПК: G01S 17/00
Мітки: наземний, радіолокаційний, висотомір
Код посилання
<a href="https://ua.patents.su/4-15947-nazemnijj-radiolokacijjnijj-visotomir.html" target="_blank" rel="follow" title="База патентів України">Наземний радіолокаційний висотомір</a>
Спосіб вимирювання кута місця цілі для наземного секвентного радіолокатора
Номер патенту: 13417
Опубліковано: 16.12.1996
Автори: Родін Олександр Валерійович, Бахвалов Борис Миколайович, Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: радіолокатора, секвентного, спосіб, наземного, цілі, вимірювання, місця, кута
Формула / Реферат:
Способ измерения угла места цели для наземного секвентного радиолокатора, заключающийся в излучении зондирующего сигнала в виде видеоимпульса поля радиоволн наносекундной длительности без несущей частоты и приеме эхо-сигналов воздушной цели, отличающийся тем, что вместе с целью облучают земную поверхность, измеряют время запаздывания t3 друг относительно друга отрицательных видеоимпульсов эхо-сигнала цели и длительность t отрицательного...
Hаземhий вимірювач кутових коордиhат цілі
Номер патенту: 17671
Опубліковано: 20.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: цілі, кутових, коордиhат, вимірювач, hаземhий
Формула / Реферат:
Наземный измеритель угловых координат цели, содержащий передатчик непрерывного синусоидального сигнала, антенную систему, состоящую из передающей антенны и двух приемных антенн, двух приемников и фазометра, отличающийся тем, что антенная система выполнена в виде двух ярусов, в нижнем ярусе размещены передающая антенна и две приемных, а в верхнем ярусе - две другие приемные антенны, приемные антенны расположены симметрично относительно...
Радіолокаційний імпульсний дальномір

Номер патенту: 17451
Опубліковано: 06.05.1997
Автори: Жуков Сергій Анатолійович, Родін Олександр Валерійович, Бахвалов Борис Миколайович
МПК: G01S 17/06
Мітки: радіолокаційний, дальномір, імпульсний
Формула / Реферат:
Радиолокационный импульсный дальномер, содержащий передатчик импульсных зондирующих сигналов с периодом следования T1 > 2rm/c, приемо-передающую антенну с антенным переключателем, приемник, синхронизатор и индикатор, отличающийся тем, что антенна, приемник и передатчик выполнены для несинусоидальных импульсных сигналов наносекундной длительности t без несущей частоты в виде периодической пачки n таких импульсов с периодом T1 и периодом...
Радіолокаційний вимірювач кута місця цілі
Номер патенту: 13421
Опубліковано: 16.12.1996
Автори: Родін Олександр Валерійович, Жуков Сергій Анатолійович, Бахвалов Борис Миколайович
МПК: G01S 17/06
Мітки: цілі, місця, вимірювач, радіолокаційний, кута
Формула / Реферат:
Радиолокационный измеритель угла места цели, содержащий передатчик, приемник, индикатор и приемо-передающую антенну с антенным переключателем, согласно изобретению передатчик выполнен для несинусоидальных импульсных сигналов наносекундной длительности без несущей частоты, антенна выполнена в виде вибраторной решетки с плоским металлическим рефлектором, в которой расстояние между вибраторами по высоте равно высоте h подъема нижнего...
Спосіб захисту наземної рлс від пасивних перешкод

Номер патенту: 13919
Опубліковано: 25.04.1997
Автори: Бахвалов Борис Миколайович, Жуков Сергій Анатолійович, Осипа Володимир Олександрович
МПК: G01S 17/06
Мітки: наземної, захисту, пасивних, перешкод, спосіб, рлс
Формула / Реферат:
Способ защиты наземной РЛС от пассивных помех, заключающийся в излучении зондирующих сигналов, приеме эхо-сигналов, задержке эхо-сигнала и вычитании задержанного сигнала из принимаемого в данный момент сигнала, отличающийся тем, что излучают несинусоидальный импульсный сигнал в виде периодической последовательности видеоимпульсов одинаковой полярности длительностью менее 1 нс без несущей частоты, а время задержки эхо-сигнала выбирают...
Попередній патент: Спосіб виявлення підземних об’єктів з борту літального апарату на фоні пасивних перешкод від земної поверхні
Наступний патент: Вихрова труба
Випадковий патент: Пересувний підйомник для монтажу великовагових вантажів