Радіолокаційний вимірювач кута місця цілі
Номер патенту: 13421
Опубліковано: 16.12.1996
Автори: Жуков Сергій Анатолійович, Родін Олександр Валерійович, Бахвалов Борис Миколайович
Формула / Реферат
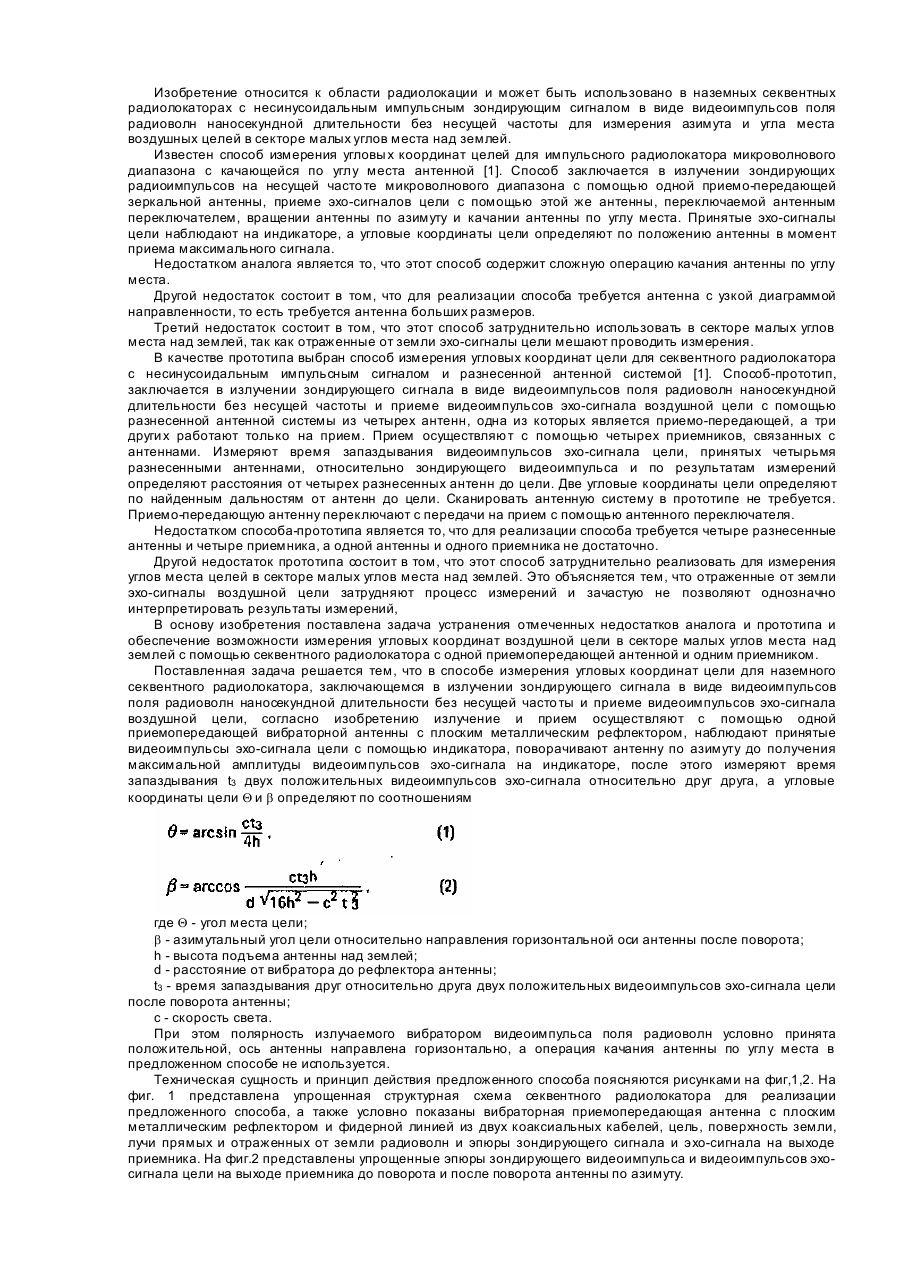
Радиолокационный измеритель угла места цели, содержащий передатчик, приемник, индикатор и приемо-передающую антенну с антенным переключателем, согласно изобретению передатчик выполнен для несинусоидальных импульсных сигналов наносекундной длительности без несущей частоты, антенна выполнена в виде вибраторной решетки с плоским металлическим рефлектором, в которой расстояние между вибраторами по высоте равно высоте h подъема нижнего вибратора над землей и удаление d вибраторов от рефлектора d >2 Nhtg qв, на выходе приемника установлены два широкополосных диода противоположной полярности, выходы которых связаны с устройством вычитания отрицательных импульсов сигнала из положительных импульсов, выход устройства вычитания связан через входное устройство связи со входом широкополосного усилителя видеоимпульсов с обратной связью в виде управляемой линии задержки с устройством изменения длины линии и датчиком длины этой линии, выход этого усилителя связан через выходное устройство связи с индикатором и входом управляемой линии задержки, выход которой также связан со входом усилителя через входное устройство связи, выход датчика длины линий задержки связан с вычислителем угла места цели в по соотношению
где h - высота подъема нижнего вибратора антенной решетки над землей;
d - расстояние от вибраторов до рефлектора антенны;
N - количество вибраторов в вертикальном ряду решетки;
q - угол места цели;
qв - верхний угол угломестного рабочего сектора;
V - скорость распространения радиоволн в линии задержки;
с - скорость света;
l - длина линии задержки, соответствующая максимальному значению сигнала на входе индикатора.
Текст
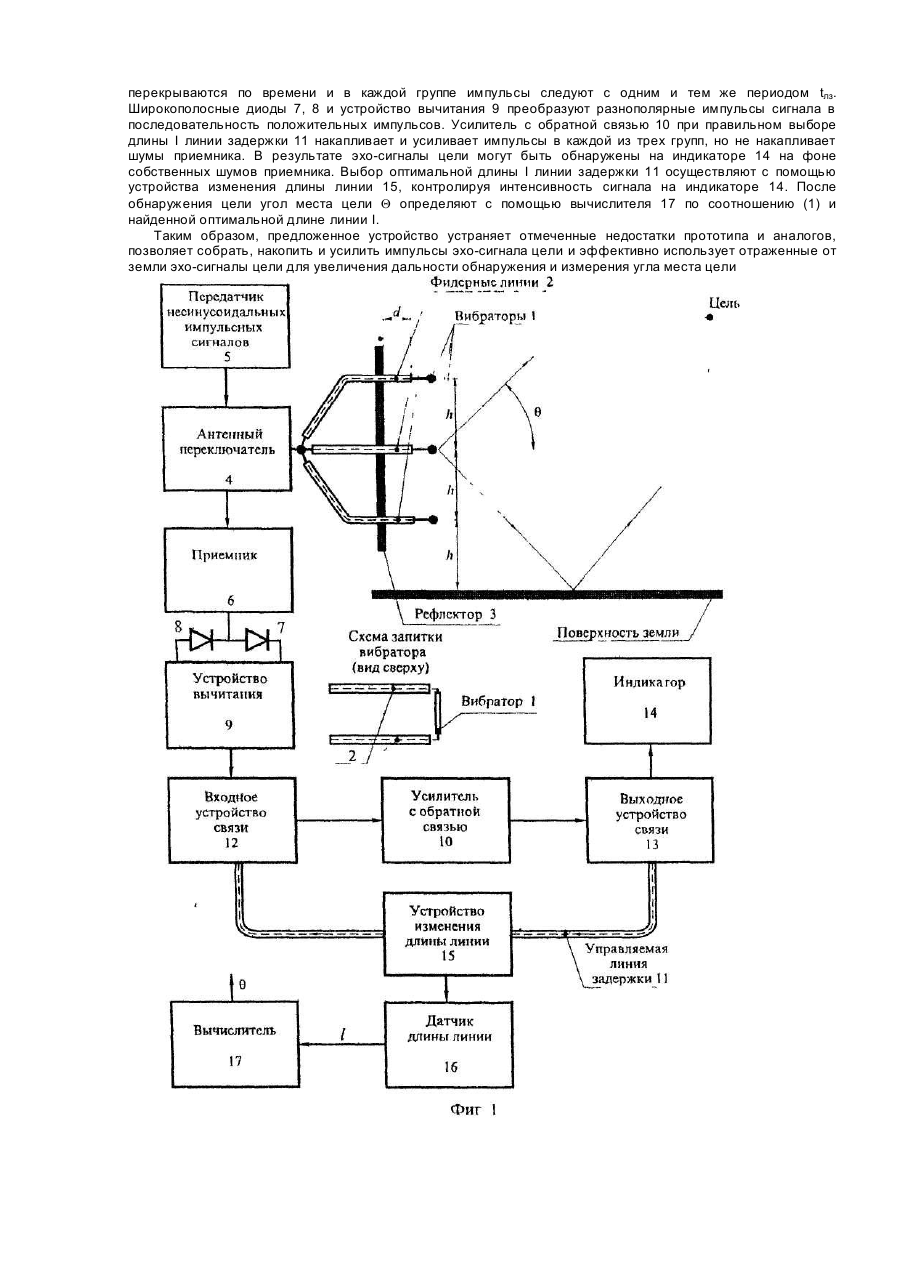
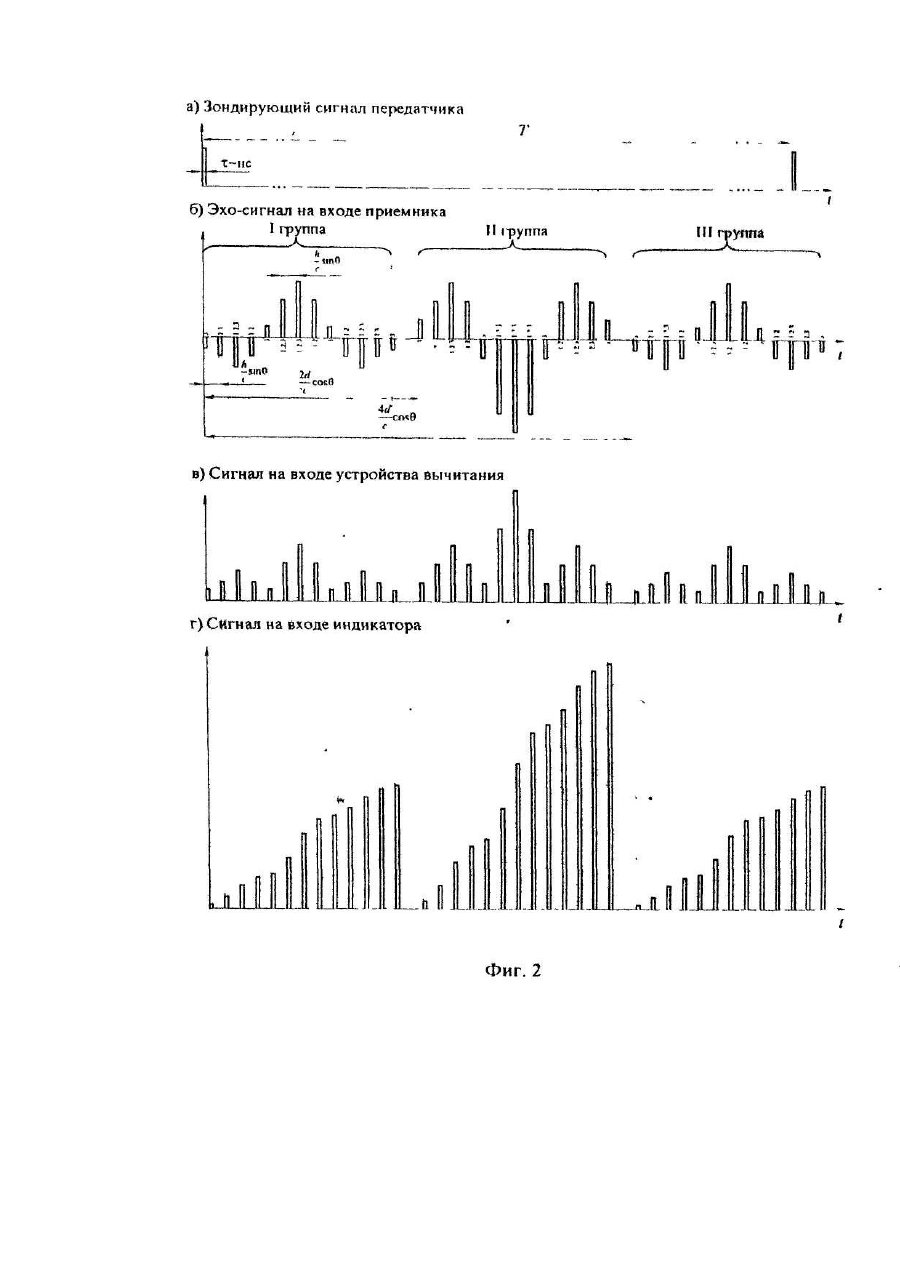
Изобретение относится к области радиолокации и может быть использовано в наземных РЛС обнаружения воздушных целей с несинусоидальным импульсным сигналом наносекундной длительности для измерения угла места цели. Известен фазовый измеритель угловой координаты (например, угла места) цели [1]. Он содержит две разнесенные по высоте антенны. Измерение угла места цели основано на измерении сдвига фаз синусоидальных сигналов, принимаемых этими антеннами. Недостатком этого аналога является то, что этому фазовому измерителю присуща неопределенность измерения угла места. В тех случаях, когда сдвиг фаз сигналов окажется больше 2 p определение угла места становится неопределенным. Другой недостаток аналога состоит в том, что измерение угла в секторе малых углов места над землей сильно затруднено отраженными от земли эхо-сигналами цели. Это приводит к тому, что суммарные сигналы в антеннах почти не будут иметь сдвига фаз и потеряют информацию о малых углах места цели. Известен также радиолокатор с несинусоидальным импульсным сигналом, который можно использовать для измерения трех координат цели [2]. Этот аналог содержит разнесенную в пространстве антенную систему из двух или более антенн и излучает периодические импульсные сигналы наносекундной длительности без несущей частоты. Измерение угловой координаты основано на измерениях дальностей от разнесенных антенн до цели, а дальность определяют по времени запаздывания импульса эхо-сигнала относительно зондирующего импульса. При этом период следования импульсов Т обычно Т>2rm/с, где rm - максимальная дальность обнаружения, с - скорость света. Это ограничение на период следования импульсов обусловлено необходимостью обеспечения однозначности измерения дальности по времени запаздываний. В таком аналоге для усиления сигналов иногда можно использовать усилитель видеоимпульсов с обратной связью [2]. В состав этого усилителя входят следующие элементы: широкополосный усилитель видеоимпульсов наносекундной длительности; неискажающая линия задержки, время задержки которой равно периоду следования импульсов Т (эта линия образует кольцо обратной связи усилителя); входное устройство связи, связывающее вход усилителя с источником сигнала и выходом линии задержки; выходное устройство связи, связывающее выход усилителя со входом линии задержки и с потребителем усиленного сигнала. Этот усилитель работает следующим образом. Импульс напряжения наносекундной длительности от источника сигнала поступает через входное устройство связи на вход усилителя видеоимпульсов, усиливается и через выходное устройство связи поступает на вход линии задержки. Эта линия задерживает сигнал на период следования. Задержанный импульс через входное устройство связи поступает на восход усилителя и в это же время на вход усилителя приходит второй импульс периодической последовательности от источника сигнала через входное устройство связи. Эти импульсы складываются, снова усиливаются и процесс повторяется. В результате многократного прохождения сигнала по цепи обратной связи сигнал накапливается и усиливается, а усиленный сигнал можно выделить на выходе выходного устройства связи на фоне собственных шумов устройства. Такой усилитель накапливает и усиливает только периодические сигналы, период которых соответствует времени задержки линии задержки. Другие непериодические сигналы и шумы не будут накапливаться и усиливаться. То есть устройство обладает избирательностью. Рассматриваемый радиолокатор с описанным выше усилителем имеет следующий недостаток. Линия задержки в цепи обратной связи должна обеспечивать задержку на период следования Т, то есть, длина линии должна быть почти вдвое больше максимальной дальности обнаружения rm. При больших дальностях rm неискажающую линию задержки наносекундных импульсов выполнить нельзя, так как длина ее и потери в ней будут очень велики. Это ограничивает возможности использования такого усилителя в радиолокатореаналоге. Другой недостаток радиолокатора-аналога состоит в том, что этот радиолокатор не использует отраженные от земли радиоволны эхо-сигналов целей и часть энергии эхо-сигналов цели, приходящих к антенне, бесполезно теряется. В качестве прототипа выбрана РЛС определения высоты цели с качающейся по углу места антенной [3]. В состав прототипа входят следующие основные элементы: передатчик периодических импульсных сигналов в виде радиоимпульсов микросекундной длительности на несущей частоте микроволнового диапазона, приемопередающая антенна с антенным переключателем, приемник и индикатор. Антенна прототипа имеет узкую диаграмму направленности в вертикальной плоскости и качается по углу места. Угол места цели определяют по положению антенны в момент приема максимального эхо-сигнала цели. Высоту цели в прототипе определяют по результату измерения угла места и дальности, которую определяют по времени запаздывания эхо-сигнала относительно зондирующего импульса. Недостатком прототипа является то, что для измерения угла места требуется антенна с узкой диаграммой направленности и большим вертикальным размером и эту громоздкую антенну требуется качать по углу места. Другим недостатком прототипа является то, что измерение малых углов места цели над землей с помощью такой РЛС весьма затруднительно, так как отраженные от земли эхо-сигналы цели мешают измерять малые углы места, снижают точность и зачастую срывают процесс измерения. Энергия таких отраженных от земли сигналов не используется и только мешает работе, а эти сигналы стремятся подавить с помощью узкой диаграммы направленности антенны. В основу изобретения поставлена задача устранения отмеченных недостатков аналогов и прототипа, а также обеспечение возможности использования отраженных от земли эхо-сигналов цели для увеличения дальности обнаружения и измерения угла места цели. Поставленная задача решается тем, что в радиолокационном измерителе угла места цели, содержащем передатчик, приемник, индикатор и приемопередающую антенну с антенным переключателем, согласно изобретению передатчик выполнен для несинусоидальных импульсных сигналов наносекундной длительности без несущей частоты, антенна выполнена в виде вибраторной решетки с плоским металлическим рефлектором, в которой расстояние между вибраторами по высоте равно высоте h подъема нижнего вибратора над землей и удаление d вибраторов от рефлектора d>2NhtgQ в, на выходе приемника установлены два широкополосных диода противоположной полярности,, выходы которых связаны с устройством вычитания отрицательных импульсов сигнала из положительных импульсов, выход устройства вычитания связан через входное устройство связи со входом широкополосного усилителя видеоимпульсов с обратной связью в виде управляемой линии задержки с устройством изменения длины линии с датчиком длины этой линии, выход этого усилителя связан через выходное устройство связи с индикатором и входом управляемой линии задержки, выход которой также связан со входом усилителя через входное устройство связи, выход датчика длины линии задержки связан с вычислителем угла места цели в по соотношению где d - расстояние от вибраторов до рефлектора антенны; N - количество вибраторов в вертикальном ряду решетки; n - высота подъема нижнего вибратора антенной решетки над землей; Q в - верхний угол угломестного рабочего сектора; Q - угол места цели; I - длина линии задержки, соответствующая максимальному значению, сигнала на выходе индикатора; с - скорость света; V - скорость распространения радиоволн в линии задержки. При этом не требуется качать антенну по углу места. Техническая сущность и принцип действия предложенного устройства поясняются рисунками на фиг. 1,2. На фиг. 1 представлена упрощенная структурная схема предложенного радиолокационного измерителя угла места цели, показаны эскиз антенны и схема запитки вибратора фидерной линией (вид сверху), а также лучи радиоволн от антенны к цели. На фиг. 2 условно показаны упрощенные эпюры зондирующего сигнала и эхосигналов на входе приемника на выходе устройства вычитания и на входе индикатора. В состав предложенного устройства на фиг. 1 входят следующие основные элементы: вибраторы антенной решетки 1 длиной I в 2rm/с; приемник 6; широкополосные диоды 7, 8 для разделения положительных и отрицательных импульсов эхо-сигнала, подключение к выходу приемника в противоположной полярности; устройство вычитания 9 отрицательных импульсов сигналаиз положительных импульсов; широкополосный усилитель видеоимпульсов 10 с обратной связью в виде управляемой линии задержки 11; входное устройство связи 12 выходов линии задержки 11 и устройства вычитания 9 со входом усилителя 10; выходное устройство связи 13 выхода усилителя 10 со входом линии задержки 11 и индикатора 14; устройство изменения длины линии задержки 15 с датчиком длины линии 16; вычислитель 17 угла места цели Q по соотношению (1) и значению длины линии I, соответствующему максимальному значению сигнала на входе индикатора 14. Принцип действия предложенного устройства поясняется следующим. Передатчик 5 формирует зондирующий сигнал в виде видеоимпульсов поля радиоволн без несущей частоты длительностью t~ 1 не и менее с периодом следования T>2rm/c, а эпюра этого сигнала показана на фиг. 2а. Все вибраторы антенны излучают такой зондирующий сигнал одновременно. Радиоволны от нижнего вибратора до цели и обратно распространяются следующими четырьмя возможными путями: 1) вибратор - цель - вибратор; 2) вибратор - цель - земля - вибратор; 3) вибратор - земля - цель - вибратор; 4) вибратор - земля - цель - земля - вибратор. При каждом отражении от земли или цели полярность импульса поля радиоволн изменяется [2]. Самым коротким является первый путь. Второй и третий пути одинаковы по длине и импульс на этих путях запаздывает на время относительно импульса первого пути, а оба импульса второго и третьего пути складываются и амплитуда поля почти удваивается. Четвертый путь самый длинный и импульс на этом пути запаздывает на время 2t3 относительно импульса первого пути. В результате одному зондирующему импульсу вибратора будет соответствовать три импульса эхо-сигнала, из которых крайние импульсы имеют одинаковую полярность, а средний - противоположную полярность. Следует также учесть импульсы, излученные одним вибратором, а принятые другими после отражения от цели и от земли по различным путям распространения. В результате получим группу из 4N+1 разнополярных импульсов с периодом следования (hlc)sin Q - где N - количество вибраторов в вертикальном ряду решетки, Q - угол места цели. При этом не учтены отражения от рефлектора антенны. Если учесть эти отражения, то одному зондирующему импульсу вибратора будут соответствовать три группы импульсов эхо-сигнала. Первая группа импульсов вообще не отражается от рефлектора. Вторая группа импульсов отражается от рефлектора только один раз либо при передаче, либо при приеме и импульсы этой группы удваиваются по амплитуде. Третья группа импульсов отражается от рефлектора два раза: один раз при передаче и второй раз при приеме. Вторая группа импульсов смещена относительно первой группы на время а третья группа - на время 2tэр. Расстояние между соседними вибраторами решетки равно h, поэтому импульсы прямых радиоволн эхосигнала смещены в соседних вибраторах также на время t3, a средние импульсы соответствующие второму и третьему путям, совпадают по времени и полярности в каждой группе для всех вибраторов и складываются на входе приемника. В результате эхо-сигнал на входе приемника будет иметь примерно такой вид как показано на эпюре фиг. 2б. Эта эпюра построена для частного случая когда вертикальный ряд антенной решетки состоит из трех вибраторов, и легко может быть обобщена на случай любого иного количества вибраторов. На этой эпюре около каждого импульса указан номер вибратора, которым этот импульс принят, а нумерация вибраторов ведется снизу вверх. При этом учтено, что полярность импульса поля радиоволн изменяется при каждом отражении от земли, цели или рефлектора. Как видно из фиг. 2б, различные импульсы эхо-сигнала в приемнике имеют разную полярность. Для того, чтобы можно было усиливать подобные импульсы с помощью описанного выше усилителя с обратной связью аналога [2], необходимо преобразовать эти импульсы к последовательности импульсов одинаковой полярности. Это предлагается выполнить с помощью двух широкополосных диодов 7, 8 и устройства вычитания 9. Диоды разделяют положительные и отрицательные импульсы, а устройство вычитания преобразует отрицательные импульсы в положительные. В результате сигнал на выходе устройства вычитания 9 будет выглядеть примерно так, как показано на эпюре фиг. 2в. Каждую группу таких положительных импульсов уже можно усиливать с помощью усилителя с обратной связью 10, если подобрать соответствующую длину I линии задержки 11 с помощью устройства изменения длины линии 15. При этом время задержки этой линии tлз должно быть равно времени запаздывания импульсов в каждой группе, то есть В случае выполнения условия (4) время задержки линии 11 будет равно периоду следования импульсов в каждой группе и усилитель 10 будет накапливать и усиливать импульсы в каждой группе, а сигнал на выходе усилителя 10 и входе индикатора 14 будет выглядеть примерно так, что показано на фиг. 2г. Найдя оптимальную длину I путем изменения длины линии и наблюдения за уровнем выходного сигнала на индикаторе 14, можно далее определить угол места цели по соотношению (1) которое получено из (4), Расстояние d от вибраторов до рефлектора должно быть где N - количество вибраторов в вертикальном ряду решетки; Q в - верхний угол угломестного рабочего сектора. Это условие необходимо обеспечить для того, чтобы разнополярные импульсы соседних групп (фиг, 2б) не накладывались и не подавляли друг друга. Физический смысл соотношения (5) ясен из геометрии антенны и фиг. 2б. Равенство высоты подъема h нижнего вибратора над землей расстоянию между вибраторами необходимо для того, чтобы импульсы в каждой группе представляли собой периодическую последовательность с периодом tлз. тогда их можно будет накопить и усилить с помощью усилителя с обратной связью 10. В предложенном устройстве принципиально необходимо использовать несинусоидальные импульсные сигналы наносекундной длительности, так как только для таких сигналов импульсы прямых и отраженных от земли радиоволн будут разрешены по времени. Таким образом предложенное устройство может быть практически реализовано, а отмеченные выше отличительные признаки являются существенными и принципиально необходимы для реализации этого устройства. Основные элементы предложенного устройства на фиг. 1 выполнены следующим образом. Антенна, передатчик 5 и приемник 6 выполнены для излучения и приема несинусоидальных импульсных сигналов наносекундной длительности без несущей частоты. Такие системы могут быть практически реализованы, так как физические основы и принципы построения их известны и описаны в литературе {2]. Пример построения вибраторной антенны с рефлектором для наносекундных видеоимпульсов также описан в литературе [2]. Фидерные линии 2 запитывают вибраторы с концов, подключены параллельно к антенному переключателю и выполнены из коаксиальных кабелей одинаковой длины. Наружные оболочки этих кабелей служат для экранирования излучения линии, не являются несущими сигнал элементами и могут быть заземлены. Антенный переключатель 4 имеет известную конструкцию и служит для закорачивания входа приемника на время передачи зондирующего импульса. Конструкция и работа широкополосного усилителя 10 периодических видеоимпульсов наносекундной длительности с устройствами связи 12, 13 и линией задержки 11 описаны в литературе [2]. Линию задержки 11 можно выполнить в виде отрезка коаксиальной или двухпроводной линии изменяемой длины. Такая линия может быть практически реализована, так как ее требуемая максимальная длина сравнительно не велика и приемлема для реализации. Индикатор 14 аналогичен соответствующему устройству прототипа. Вычислитель 17 представляет собой микроЭВМ для вычисления угла места цели по соотношению (1). Динамика работы предложенного устройства осуществляется следующим образом. Передатчик формирует, а все вибраторы антенны одновременно излучают зондирующий импульс поля радиоволн наносекундной длительности без несущей частоты. При распространении от антенны до цели и обратно радиоволны отражаются от рефлектора, земли и цели и при каждом отражении полярность импульса поля радиоволн изменяется. В результате многократных отражений от земли и рефлектора эхо-сигнал на входе приемника от одного зондирующего импульса будет состоять из трех групп разнополярных видеоимпульсов, как показано на фиг.2б. Предложенная конструкция антенны обеспечивает то, что эти группы не перекрываются по времени и в каждой группе импульсы следуют с одним и тем же периодом tлз. Широкополосные диоды 7, 8 и устройство вычитания 9 преобразуют разнополярные импульсы сигнала в последовательность положительных импульсов. Усилитель с обратной связью 10 при правильном выборе длины I линии задержки 11 накапливает и усиливает импульсы в каждой из трех групп, но не накапливает шумы приемника. В результате эхо-сигналы цели могут быть обнаружены на индикаторе 14 на фоне собственных шумов приемника. Выбор оптимальной длины I линии задержки 11 осуществляют с помощью устройства изменения длины линии 15, контролируя интенсивность сигнала на индикаторе 14. После обнаружения цели угол места цели Q определяют с помощью вычислителя 17 по соотношению (1) и найденной оптимальной длине линии I. Таким образом, предложенное устройство устраняет отмеченные недостатки прототипа и аналогов, позволяет собрать, накопить и усилить импульсы эхо-сигнала цели и эффективно использует отраженные от земли эхо-сигналы цели для увеличения дальности обнаружения и измерения угла места цели
ДивитисяДодаткова інформація
Назва патенту англійськоюRadar target angle of elevation measuring unit
Автори англійськоюZhukov Serhii Anatoliiovych, Bakhvalov Borys Mykolaiovych, Rodin Oleksandr Valeriiovych
Назва патенту російськоюРадиолокационный измеритель угла места цели
Автори російськоюЖуков Сергей Анатольевич, Бахвалов Борис Николаевич, Родин Александр Валериевич
МПК / Мітки
МПК: G01S 17/06
Мітки: місця, цілі, радіолокаційний, кута, вимірювач
Код посилання
<a href="https://ua.patents.su/5-13421-radiolokacijjnijj-vimiryuvach-kuta-miscya-cili.html" target="_blank" rel="follow" title="База патентів України">Радіолокаційний вимірювач кута місця цілі</a>
Вимірювач азимуту і кута місця для трикоординатної рлс
Номер патенту: 13418
Опубліковано: 16.12.1996
Автори: Бахвалов Борис Миколайович, Жуков Сергій Анатолійович, Родін Олександр Валерійович
МПК: G01S 17/06
Мітки: вимірювач, кута, трикоординатної, рлс, азимуту, місця
Формула / Реферат:
Измеритель азимута и угла места для трехкоординатной РЛС, содержащий передатчик с передающей антенной, приемник и индикатор, отличающийся тем, что передатчик выполнен для несинусоидальных импульсных сигналов наносекундной длительности без несущей частоты, приемная антенна выполнена в виде вибраторной антенной решетки с уголковым рефлектором из двух взаимно перпендикулярных проводящих плоскостей, в которой удаление ближнего вибратора от...
Спосіб вимирювання кута місця цілі для наземного секвентного радіолокатора
Номер патенту: 13417
Опубліковано: 16.12.1996
Автори: Бахвалов Борис Миколайович, Родін Олександр Валерійович, Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: цілі, наземного, спосіб, кута, секвентного, місця, вимірювання, радіолокатора
Формула / Реферат:
Способ измерения угла места цели для наземного секвентного радиолокатора, заключающийся в излучении зондирующего сигнала в виде видеоимпульса поля радиоволн наносекундной длительности без несущей частоты и приеме эхо-сигналов воздушной цели, отличающийся тем, что вместе с целью облучают земную поверхность, измеряют время запаздывания t3 друг относительно друга отрицательных видеоимпульсов эхо-сигнала цели и длительность t отрицательного...
Радіолокаційний пристрій для визначення дальності та швидкості цілі
Номер патенту: 3925
Опубліковано: 27.12.1994
Автори: Гладиш Фелікс Леонідович, Невгасимий Олександр Федорович, Кравцов Володимир Геннадєвич, Шермаревич Владлен Георгієвич, Гегечкорі Сергій Олексійович
МПК: G01S 13/00
Мітки: визначення, швидкості, радіолокаційний, цілі, пристрій, дальності
Формула / Реферат:
Радиолокационное устройство для определения дальности и скорости цели, содержащее смеситель, первый выход которого является сигнальным входом устройства, вычислитель дальности и скорости цели, выход которого является выходом устройства, отличающееся тем, что введены К гетеродинов, где К= 2, 3,....коммутатор. К сигнальных входов которого соединены с выходами К гетеродинов соответственно, а выход коммутатора подключен к второму входу смесителя,...
Вимірювач відстані до місця короткого замикання
Номер патенту: 2057
Опубліковано: 20.12.1994
Автори: Носулько Віктор Дмитрович, Кизилов Володимир Улянович
МПК: G01R 31/08
Мітки: місця, короткого, відстані, замикання, вимірювач
Формула / Реферат:
Измеритель расстояния до места короткого замыкания, содержащий блоки выбора тока и напряжения, соединенные с поврежденными фазами объекта контроля, блок управления, выход которого соединен с управляющим входом блока памяти, к выходу которого подключен вход блока индикации, первый перемножитель, к первому входу которого подключен выход вычитателя, к первому входу которого подключен выход блока выбора напряжения, отличающийся тем, что, с...
Спосіб вимірювання кутових координат цілі для наземного секвентного радіолокатора
Номер патенту: 13419
Опубліковано: 16.12.1996
Автори: Жуков Сергій Анатолійович, Родін Олександр Валерійович, Бахвалов Борис Миколайович
МПК: G01S 17/06
Мітки: кутових, вимірювання, спосіб, радіолокатора, цілі, наземного, секвентного, координат
Формула / Реферат:
Способ измерения угловых координат цели для наземного секвентного радиолокатора, заключающийся в излучении зондирующего сигнала в виде видеоимпульсов поля радиоволн наносекундной длительности без несущей частоты и приеме видеоимпульсов эхо-сигнала воздушной цели, отличающийся тем, что излучение и прием осуществляют с помощью одной приемо-передающей вибраторной антенны с плоским металлическим рефлектором, наблюдают принятые видеоимпульсы...
Попередній патент: Спосіб вимірювання кутових координат цілі для наземного секвентного радіолокатора
Наступний патент: Спосіб вимірювання кута місця маловисотної цілі
Випадковий патент: Рекламний пристрій