Пристрій контролю точності положення елементів споруди
Номер патенту: 16631
Опубліковано: 15.08.2006
Автори: Бурачек Всеволод Германович, Боровий Валентин Олександрович, Шульц Роман Володимирович, Рябчій Владислав Валерійович, Крисенко Максим Вікторович
Формула / Реферат
Пристрій для контролю точності положення елементів інженерної споруди, що містить ланцюг взаємопов'язаних фотоелектричних каналів, який відрізняється тим, що він містить щонайменше два паралельні ланцюжки фотоелектричних каналів, елементи яких (джерела світла, лінзи-об'єктиви і фотоприймачі) встановлені попарно в блоках, які жорстко закріплені на конструкціях споруд, при цьому однотипні елементи двох різних фотоелектричних ланцюжків мають зсуви відносно один одного в напрямку ходу ланцюжків на один крок.
Текст
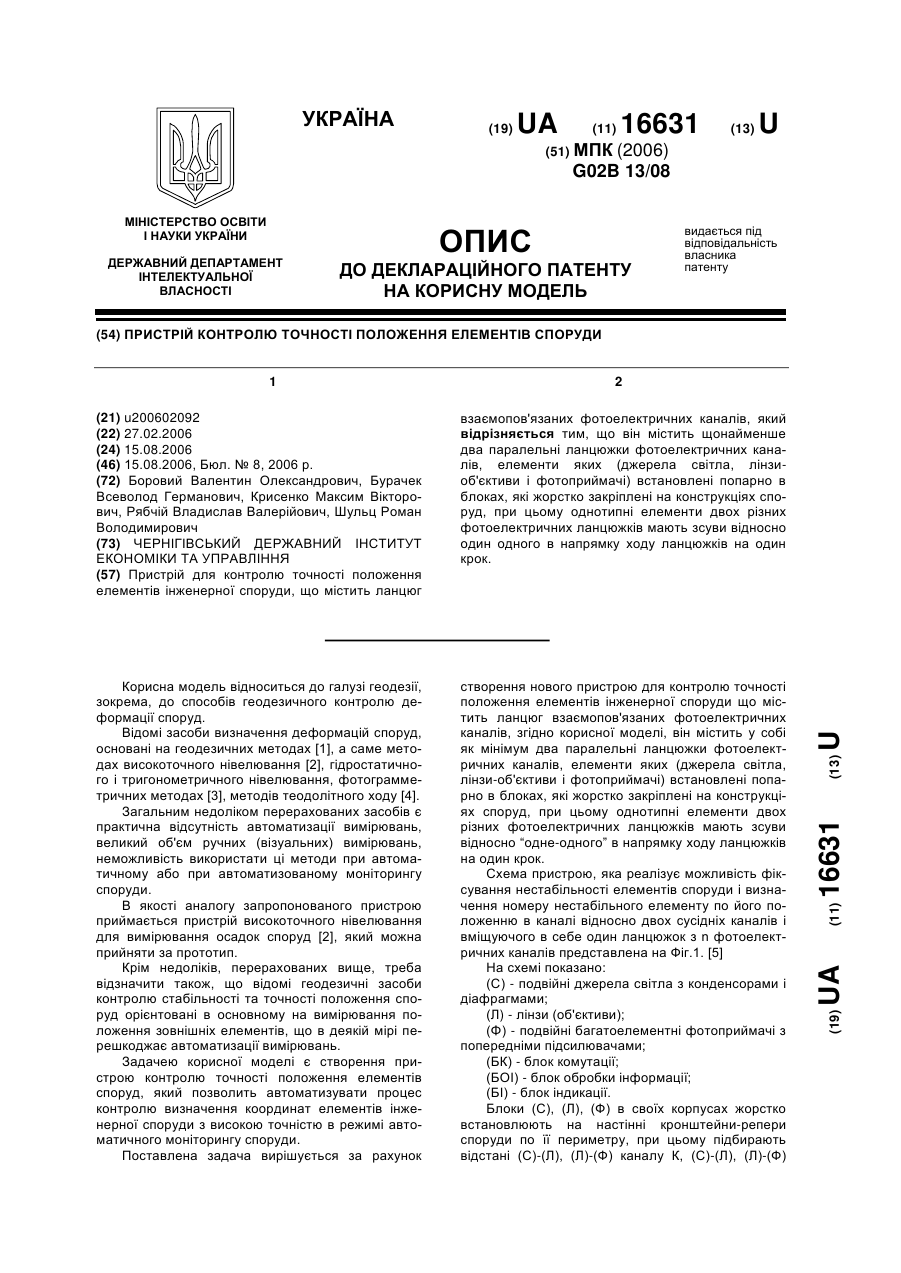
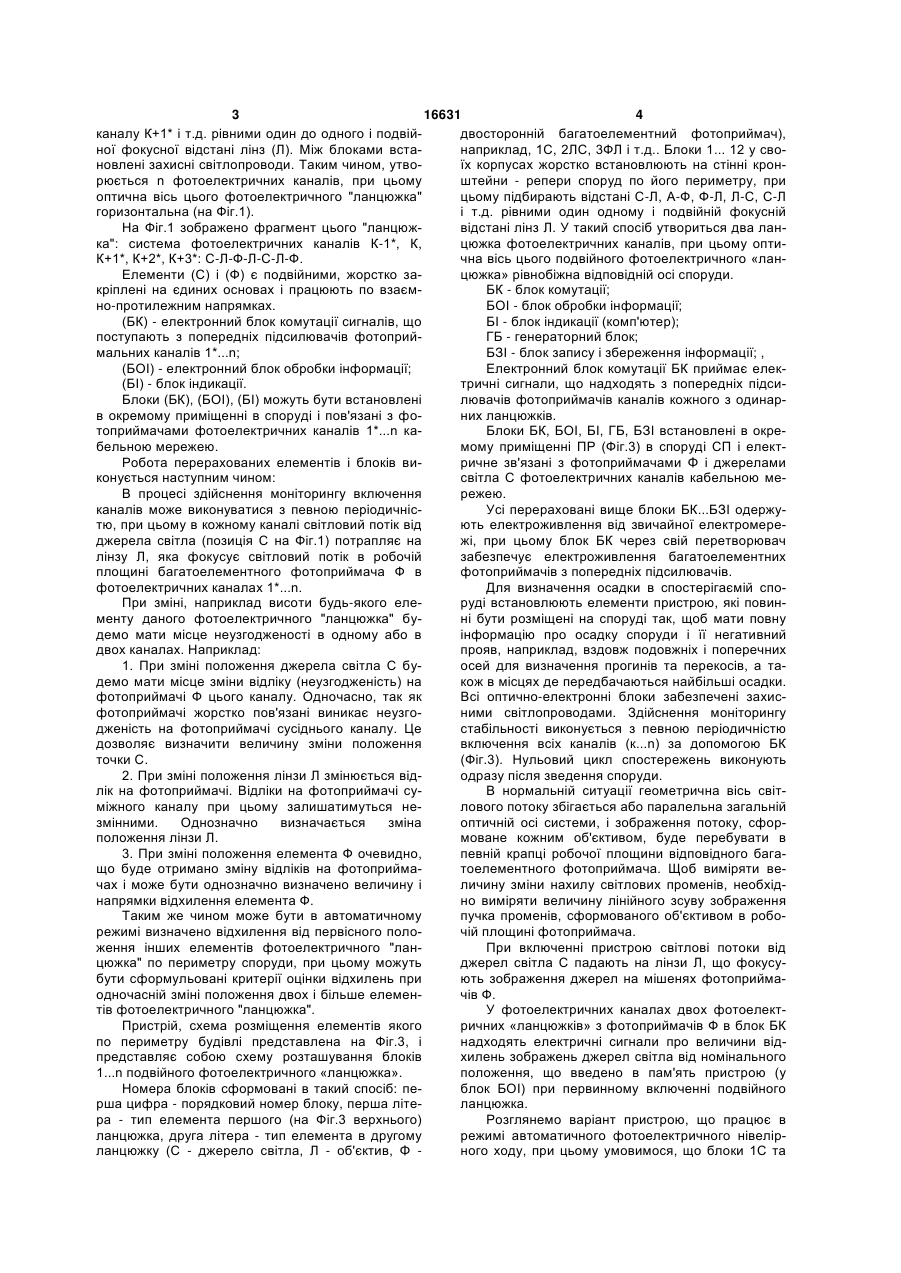
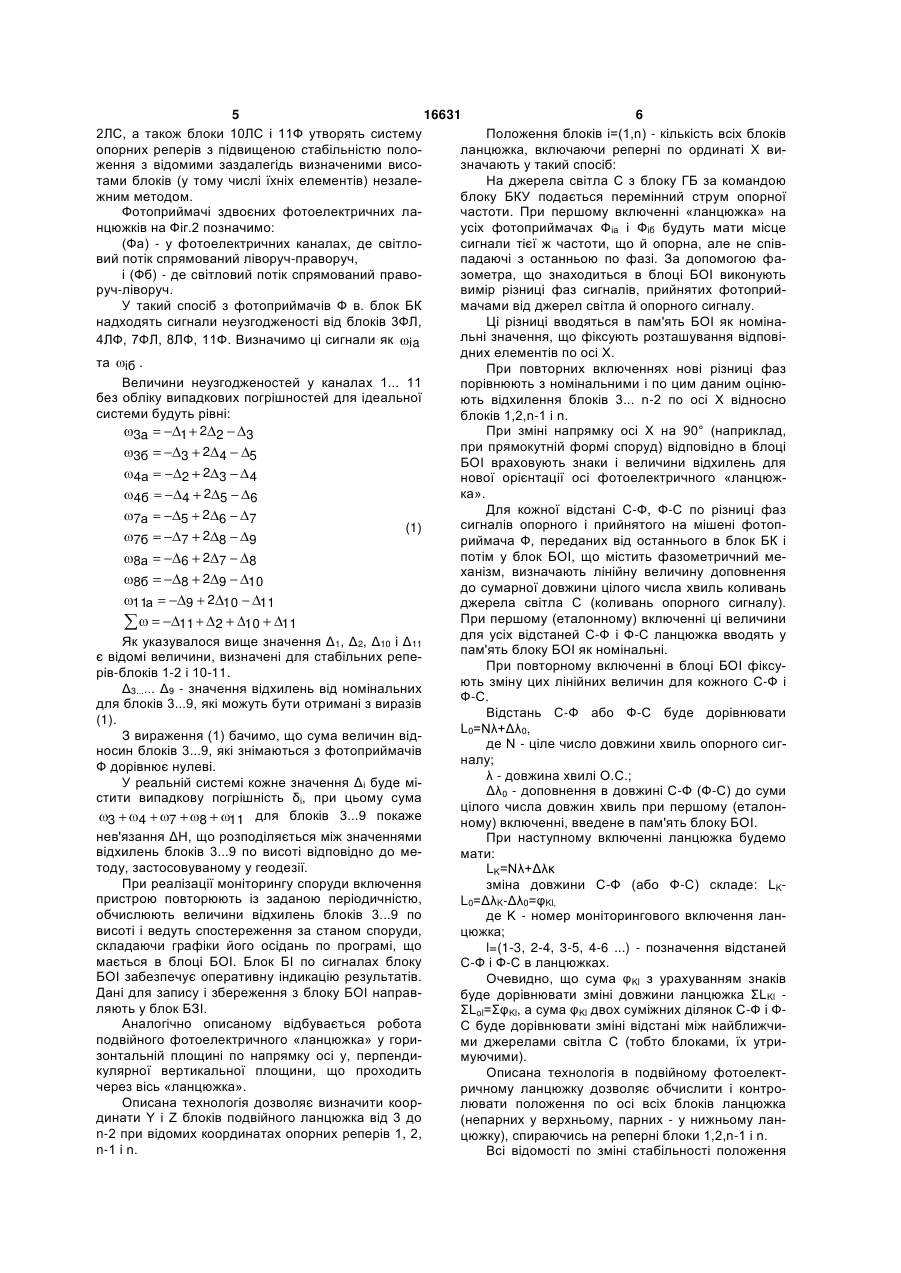
Пристрій для контролю точності положення елементів інженерної споруди, що містить ланцюг 3 16631 4 каналу К+1* і т.д. рівними один до одного і подвійдвосторонній багатоелементний фотоприймач), ної фокусної відстані лінз (Л). Між блоками встанаприклад, 1C, 2ЛС, 3ФЛ і т.д.. Блоки 1... 12 у своновлені захисні світлопроводи. Таким чином, утвоїх корпусах жорстко встановлюють на стінні кронрюється n фотоелектричних каналів, при цьому штейни - репери споруд по його периметру, при оптична вісь цього фотоелектричного "ланцюжка" цьому підбирають відстані С-Л, А-Ф, Ф-Л, Л-С, С-Л горизонтальна (на Фіг.1). і т.д. рівними один одному і подвійній фокусній На Фіг.1 зображено фрагмент цього "ланцюжвідстані лінз Л. У такий спосіб утвориться два ланка": система фотоелектричних каналів К-1*, К, цюжка фотоелектричних каналів, при цьому оптиК+1*, К+2*, К+3*: С-Л-Ф-Л-С-Л-Ф. чна вісь цього подвійного фотоелектричного «ланЕлементи (С) і (Ф) є подвійними, жорстко зацюжка» рівнобіжна відповідній осі споруди. кріплені на єдиних основах і працюють по взаємБК - блок комутації; но-протилежним напрямках. БОI - блок обробки інформації; (БК) - електронний блок комутації сигналів, що БІ - блок індикації (комп'ютер); поступають з попередніх підсилювачів фотоприйГБ - генераторний блок; мальних каналів 1*...n; БЗІ - блок запису і збереження інформації; , (БОI) - електронний блок обробки інформації; Електронний блок комутації БК приймає елек(БІ) - блок індикації. тричні сигнали, що надходять з попередніх підсиБлоки (БК), (БОI), (БІ) можуть бути встановлені лювачів фотоприймачів каналів кожного з одинарв окремому приміщенні в споруді і пов'язані з фоних ланцюжків. топриймачами фотоелектричних каналів 1*...n каБлоки БК, БОI, БІ, ГБ, БЗІ встановлені в окребельною мережею. мому приміщенні ПР (Фіг.3) в споруді СП і електРобота перерахованих елементів і блоків виричне зв'язані з фотоприймачами Φ і джерелами конується наступним чином: світла С фотоелектричних каналів кабельною меВ процесі здійснення моніторингу включення режею. каналів може виконуватися з певною періодичнісУсі перераховані вище блоки БК...БЗІ одержутю, при цьому в кожному каналі світловий потік від ють електроживлення від звичайної електромереджерела світла (позиція С на Фіг.1) потрапляє на жі, при цьому блок БК через свій перетворювач лінзу Л, яка фокусує світловий потік в робочій забезпечує електроживлення багатоелементних площині багатоелементного фотоприймача Ф в фотоприймачів з попередніх підсилювачів. фотоелектричних каналах 1*...n. Для визначення осадки в спостерігаємій споПри зміні, наприклад висоти будь-якого елеруді встановлюють елементи пристрою, які повинменту даного фотоелектричного "ланцюжка" буні бути розміщені на споруді так, щоб мати повну демо мати місце неузгодженості в одному або в інформацію про осадку споруди і її негативний двох каналах. Наприклад: прояв, наприклад, вздовж подовжніх і поперечних 1. При зміні положення джерела світла С буосей для визначення прогинів та перекосів, а тадемо мати місце зміни відліку (неузгодженість) на кож в місцях де передбачаються найбільші осадки. фотоприймачі Ф цього каналу. Одночасно, так як Всі оптично-електронні блоки забезпечені захисфотоприймачі жорстко пов'язані виникає неузгоними світлопроводами. Здійснення моніторингу дженість на фотоприймачі сусіднього каналу. Це стабільності виконується з певною періодичністю дозволяє визначити величину зміни положення включення всіх каналів (к...n) за допомогою БК точки С. (Фіг.3). Нульовий цикл спостережень виконують 2. При зміні положення лінзи Л змінюється відодразу після зведення споруди. лік на фотоприймачі. Відліки на фотоприймачі суВ нормальній ситуації геометрична вісь світміжного каналу при цьому залишатимуться нелового потоку збігається або паралельна загальній змінними. Однозначно визначається зміна оптичній осі системи, і зображення потоку, сфорположення лінзи Л. моване кожним об'єктивом, буде перебувати в 3. При зміні положення елемента Ф очевидно, певній крапці робочої площини відповідного багащо буде отримано зміну відліків на фотоприйматоелементного фотоприймача. Щоб виміряти вечах і може бути однозначно визначено величину і личину зміни нахилу світлових променів, необхіднапрямки відхилення елемента Ф. но виміряти величину лінійного зсуву зображення Таким же чином може бути в автоматичному пучка променів, сформованого об'єктивом в роборежимі визначено відхилення від первісного полочій площині фотоприймача. ження інших елементів фотоелектричного "ланПри включенні пристрою світлові потоки від цюжка" по периметру споруди, при цьому можуть джерел світла С падають на лінзи Л, що фокусубути сформульовані критерії оцінки відхилень при ють зображення джерел на мішенях фотоприймаодночасній зміні положення двох і більше елеменчів Ф. тів фотоелектричного "ланцюжка". У фотоелектричних каналах двох фотоелектПристрій, схема розміщення елементів якого ричних «ланцюжків» з фотоприймачів Ф в блок БК по периметру будівлі представлена на Фіг.3, і надходять електричні сигнали про величини відпредставляє собою схему розташування блоків хилень зображень джерел світла від номінального 1...n подвійного фотоелектричного «ланцюжка». положення, що введено в пам'ять пристрою (у Номера блоків сформовані в такий спосіб: пеблок БОI) при первинному включенні подвійного рша цифра - порядковий номер блоку, перша літеланцюжка. ра - тип елемента першого (на Фіг.3 верхнього) Розглянемо варіант пристрою, що працює в ланцюжка, друга літера - тип елемента в другому режимі автоматичного фотоелектричного нівелірланцюжку (С - джерело світла, Л - об'єктив, Φ ного ходу, при цьому умовимося, що блоки 1C та 5 16631 6 2ЛС, а також блоки 10ЛС і 11Ф утворять систему Положення блоків і=(1,n) - кількість всіх блоків опорних реперів з підвищеною стабільністю пололанцюжка, включаючи реперні по ординаті Χ виження з відомими заздалегідь визначеними висозначають у такий спосіб: тами блоків (у тому числі їхніх елементів) незалеНа джерела світла С з блоку ГБ за командою жним методом. блоку БКУ подається перемінний струм опорної Фотоприймачі здвоєних фотоелектричних лачастоти. При першому включенні «ланцюжка» на нцюжків на Фіг.2 позначимо: усіх фотоприймачах Фiа і Фіб будуть мати місце (Фа) - у фотоелектричних каналах, де світлосигнали тієї ж частоти, що й опорна, але не співвий потік спрямований ліворуч-праворуч, падаючі з останньою по фазі. За допомогою фаі (Фб) - де світловий потік спрямований правозометра, що знаходиться в блоці БОI виконують руч-ліворуч. вимір різниці фаз сигналів, прийнятих фотоприйУ такий спосіб з фотоприймачів Ф в. блок БК мачами від джерел світла й опорного сигналу. надходять сигнали неузгодженості від блоків 3ФЛ, Ці різниці вводяться в пам'ять БОI як номінальні значення, що фіксують розташування відпові4ЛФ, 7ФЛ, 8ЛФ, 11Ф. Визначимо ці сигнали як ia дних елементів по осі X. та iб . При повторних включеннях нові різниці фаз Величини неузгодженостей у каналах 1... 11 порівнюють з номінальними і по цим даним оцінюбез обліку випадкових погрішностей для ідеальної ють відхилення блоків 3... n-2 по осі Χ відносно системи будуть рівні: блоків 1,2,n-1 і n. При зміні напрямку осі Χ на 90° (наприклад, 3a 1 2 2 3 при прямокутній формі споруд) відповідно в блоці 2 4 3б 3 5 БОI враховують знаки і величини відхилень для 4а 2 2 3 4 нової орієнтації осі фотоелектричного «ланцюжка». 2 5 4б 4 6 Для кожної відстані С-Ф, Ф-С по різниці фаз 2 6 7а 5 7 сигналів опорного і прийнятого на мішені фотоп(1) 7б 7 2 8 9 риймача Ф, переданих від останнього в блок БК і потім у блок БОI, що містить фазометричний ме8а 6 2 7 8 ханізм, визначають лінійну величину доповнення 8б 8 2 9 10 до сумарної довжини цілого числа хвиль коливань 11а 9 2 10 11 джерела світла С (коливань опорного сигналу). При першому (еталонному) включенні ці величини 11 2 10 11 для усіх відстаней С-Ф і Ф-С ланцюжка вводять у Як указувалося вище значення Δ1, Δ2, Δ10 і Δ11 пам'ять блоку БОI як номінальні. є відомі величини, визначені для стабільних репеПри повторному включенні в блоці БОI фіксурів-блоків 1-2 і 10-11. ють зміну цих лінійних величин для кожного С-Ф і Δ3...... Δ9 - значення відхилень від номінальних Ф-С. для блоків 3...9, які можуть бути отримані з виразів Відстань С-Ф або Ф-С буде дорівнювати (1). L0=Νλ+Δλ0, З вираження (1) бачимо, що сума величин відде Ν - ціле число довжини хвиль опорного сигносин блоків 3...9, які знімаються з фотоприймачів налу; Ф дорівнює нулеві. λ - довжина хвилі О.С.; У реальній системі кожне значення Δі буде міΔλ0 - доповнення в довжині С-Ф (Ф-С) до суми стити випадкову погрішність δі, при цьому сума цілого числа довжин хвиль при першому (еталон3 4 7 8 11 для блоків 3...9 покаже ному) включенні, введене в пам'ять блоку БОI. нев'язання ΔΗ, що розподіляється між значеннями При наступному включенні ланцюжка будемо відхилень блоків 3...9 по висоті відповідно до мемати: тоду, застосовуваному у геодезії. LK=Νλ+Δλκ При реалізації моніторингу споруди включення зміна довжини С-Ф (або Ф-С) складе: LKпристрою повторюють із заданою періодичністю, L0=ΔλK-Δλ0=φKl, обчислюють величини відхилень блоків 3...9 по де Κ - номер моніторингового включення ланвисоті і ведуть спостереження за станом споруди, цюжка; складаючи графіки його осідань по програмі, що l=(1-3, 2-4, 3-5, 4-6 ...) - позначення відстаней мається в блоці БОІ. Блок БІ по сигналах блоку С-Ф і Ф-С в ланцюжках. БОІ забезпечує оперативну індикацію результатів. Очевидно, що сума φKl з урахуванням знаків Дані для запису і збереження з блоку БОІ направбуде дорівнювати зміні довжини ланцюжка ΣLKl ляють у блок БЗІ. ΣLol=ΣφKl, а сума φKl двох суміжних ділянок С-Ф і ФАналогічно описаному відбувається робота С буде дорівнювати зміні відстані між найближчиподвійного фотоелектричного «ланцюжка» у горими джерелами світла С (тобто блоками, їх утризонтальній площині по напрямку осі у, перпендимуючими). кулярної вертикальної площини, що проходить Описана технологія в подвійному фотоелектчерез вісь «ланцюжка». ричному ланцюжку дозволяє обчислити і контроОписана технологія дозволяє визначити коорлювати положення по осі всіх блоків ланцюжка динати Υ і Ζ блоків подвійного ланцюжка від 3 до (непарних у верхньому, парних - у нижньому ланn-2 при відомих координатах опорних реперів 1, 2, цюжку), спираючись на реперні блоки 1,2,n-1 і n. n-1 і n. Всі відомості по зміні стабільності положення 7 16631 8 споруди заносяться в базу даних. На основі ство2. Я.А. Сундаков. Геодезические работы при реної бази даних моніторингу можна проводити возведении крупных промышленных и высотных моделювання подальших дій та отримувати спецізданий. М.Недра, 1980. альні звіти та рекомендації. 3. Α.Η. Лобанов. Фотограмметрия. М.Недра, В результаті запропонований пристрій дозво1984. ляє при зведенні і експлуатації споруд в автомати4. Климов О.Д., Калугин В.В., Писаренко В.К. чному режимі контролювати стабільність полоПрактикум по прикладной геодезии. Изыскания, ження елементів споруд, вести моніторинг осідань, проектирование и возведение инженерных соорудеформацій і виключити дорогі та ручні (візуальні) жений. - М.: Недра, 1991. геодезичні роботи. 5. Рішення о видачі деклараційного патенту Література: “Пристрій для контролю стабільності положення 1. Г.П. Левчук, В.Е. Новак, В.Г. Конусов. Прикелементів споруди” на корисну модель № 11023/1 ладная геодезия. Основные методы и принципы від 11.08.2005р.. инженерно-геодезических работ. М.Недра, 1981. Комп’ютерна верстка В. Мацело Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for checking the accuracy of the position of building elements
Автори англійськоюBorovyi Valentyn Oleksandrovych, Burachek Vsevolod Hermanovych, Krysenko Maksym Viktorovych, Riabchii Vladyslav Valeriiovych, Shults Roman Volodymyrovych
Назва патенту російськоюУстройство для контроля точности положения элементов сооружения
Автори російськоюБоровый Валентин Александрович, Бурачек Вселовод Германович, Крысенко Максим Викторович, Рябчий Владислав Валериевич, Шульц Роман Владимирович
МПК / Мітки
МПК: G02B 13/08
Мітки: елементів, контролю, точності, споруди, положення, пристрій
Код посилання
<a href="https://ua.patents.su/4-16631-pristrijj-kontrolyu-tochnosti-polozhennya-elementiv-sporudi.html" target="_blank" rel="follow" title="База патентів України">Пристрій контролю точності положення елементів споруди</a>
Пристрій контролю точності положення елементів інженерної споруди
Номер патенту: 16630
Опубліковано: 15.08.2006
Автори: Крисенко Максим Вікторович, Шульц Роман Володимирович, Рябчій Владислав Валерійович, Боровий Валентин Олександрович, Бурачек Всеволод Германович
МПК: G02B 13/08
Мітки: контролю, положення, інженерної, елементів, споруди, пристрій, точності
Формула / Реферат:
Пристрій для контролю точності положення елементів інженерної споруди, який містить фотоелектричні канали з елементами: джерела світла, об'єктиви, багатоелементні фотоприймачі, що створюють подвійний фотоелектричний ланцюжок, а також захисні світлопроводи з діафрагмами, який відрізняється тим, що всі елементи змонтовані і жорстко встановлені в блоках, кожний з яких містить здвоєний багатоелементний фотоприймач і два об'єктиви, які утворюють...
Спосіб контролю точності положення елементів спорудження
Номер патенту: 14992
Опубліковано: 15.06.2006
Автори: Бойко Ігор Петрович, Шульц Роман Володимирович, Крисенко Максим Вікторович, Боровий Валентин Олександрович, Бурачек Всеволод Германович
МПК: G02B 13/08
Мітки: положення, контролю, спорудження, спосіб, точності, елементів
Формула / Реферат:
Спосіб контролю точності положення елементів спорудження, що заснований на фотоелектричному вимірюванні відхилень елементів спорудження в режимі фотоелектричного ланцюжка з вимірюваних елементів (джерело світла, лінза-об’єктив, фотоприймач, лінза-об’єктив, джерело світла і т.д.), який відрізняється тим, що вимірювання величин відхилень елементів спорудження виконують одночасно не менше ніж у двох аналогічних фотоелектричних ланцюжках, при...
Пристрій для контролю стабільності положення елементів споруди
Номер патенту: 10399
Опубліковано: 15.11.2005
Автори: Бойко Ігор Петрович, Крисенко Максим Вікторович, Боровий Валентин Олександрович, Шульц Роман Володимирович, Бурачек Всеволод Германович
МПК: G02B 13/08
Мітки: споруди, стабільності, пристрій, елементів, положення, контролю
Формула / Реферат:
Пристрій для контролю елементів споруди, що містить блоки світлових випромінювачів (БСВ), блоки лінз (БЛ), блоки фотоприймачів (БФ), який відрізняється тим, що всі блоки встановлені і жорстко закріплені на елементах споруди в точках, які знаходяться на контрольних осях споруди, при цьому БСВ та БФ виконані подвійними з орієнтуванням напрямків світлового випромінювання в парі випромінювачів на 180° і відповідно з орієнтуванням напрямків...
Пристрій для вирівнювання положення споруди
Номер патенту: 37365
Опубліковано: 15.05.2001
Автор: Живодьоров Микола Андрійович
МПК: E02D 35/00
Мітки: пристрій, споруди, положення, вирівнювання
Формула / Реферат:
1. Пристрій для вирівнювання положення споруди, що містить розташовану під опорною частиною споруди циліндричну ємність з отворами по периметру на рівні днища, яка заповнена термопластичним матеріалом і з'єднана з опорною частиною споруди поршнем, розміщеним над термопластичним матеріалом; тороїдальний запірний елемент, що примикає до циліндричної ємності, центральна площина якого поєднана з осями отворів, який відрізняється тим, що...
Пристрій для контролю положення гостряка стрілочного переводу
Номер патенту: 61688
Опубліковано: 17.11.2003
Автори: Парфьонов Володимир Іванович, Парфьонов Сергій Володимирович
МПК: B61L 7/00
Мітки: пристрій, стрілочного, переводу, положення, гостряка, контролю
Формула / Реферат:
Пристрій для контролю положення гостряка стрілочного переводу, який містить автогенератор з блоками змінної ємності, підключений до змішувача з гетеродином, вихід якого через підсилювач високої частоти, полосові фільтри та обмежувачі з'єднаний з двома частотними детекторами, виходи яких через підсилювачі низької частоти, тригери Шмідта, підключені до блоків індикації крайніх положень гостряка, який відрізняється тим, що блок змінної ємності...
Попередній патент: Пристрій контролю точності положення елементів інженерної споруди
Наступний патент: Пристрій керування буровим виконавчим органом гірничодобувної машини
Випадковий патент: Вібромасажна бігова доріжка