Пристрій контролю точності положення елементів інженерної споруди
Номер патенту: 16630
Опубліковано: 15.08.2006
Автори: Рябчій Владислав Валерійович, Боровий Валентин Олександрович, Крисенко Максим Вікторович, Бурачек Всеволод Германович, Шульц Роман Володимирович
Формула / Реферат
Пристрій для контролю точності положення елементів інженерної споруди, який містить фотоелектричні канали з елементами: джерела світла, об'єктиви, багатоелементні фотоприймачі, що створюють подвійний фотоелектричний ланцюжок, а також захисні світлопроводи з діафрагмами, який відрізняється тим, що всі елементи змонтовані і жорстко встановлені в блоках, кожний з яких містить здвоєний багатоелементний фотоприймач і два об'єктиви, які утворюють дві цифрові оптико-електронні камери з взаємно протилежними напрямками оптичних осей, а також двонаправлене джерело світла з випромінюванням в двох взаєнмо протилежних напрямках, при цьому в подвійному фотоелектричному ланцюжку блоки чергуються по орієнтації на 180° навколо осі, перпендикулярній до площини, яка проходить через оптичні осі оптико-електронних камер і діафрагм джерела світла блока.
Текст
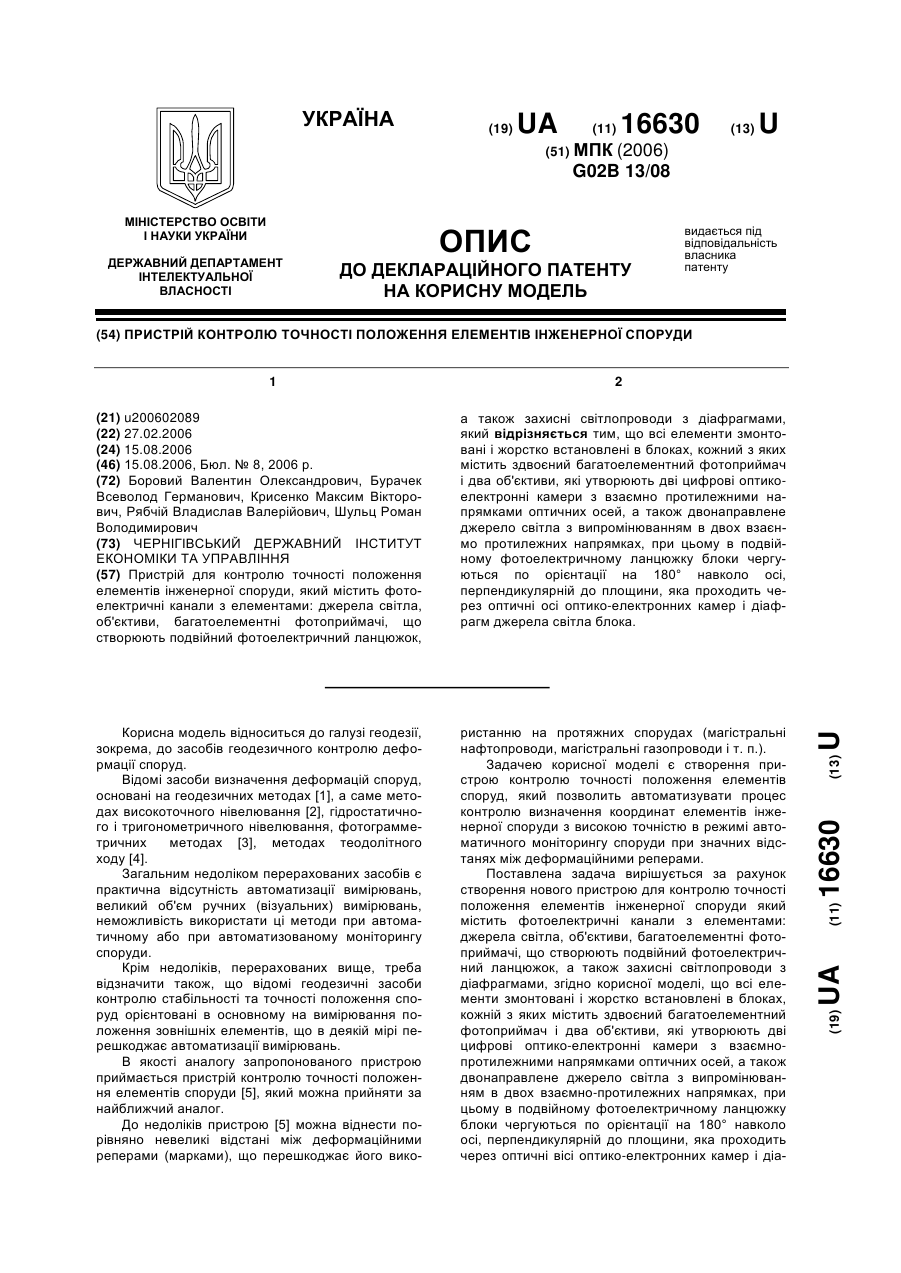
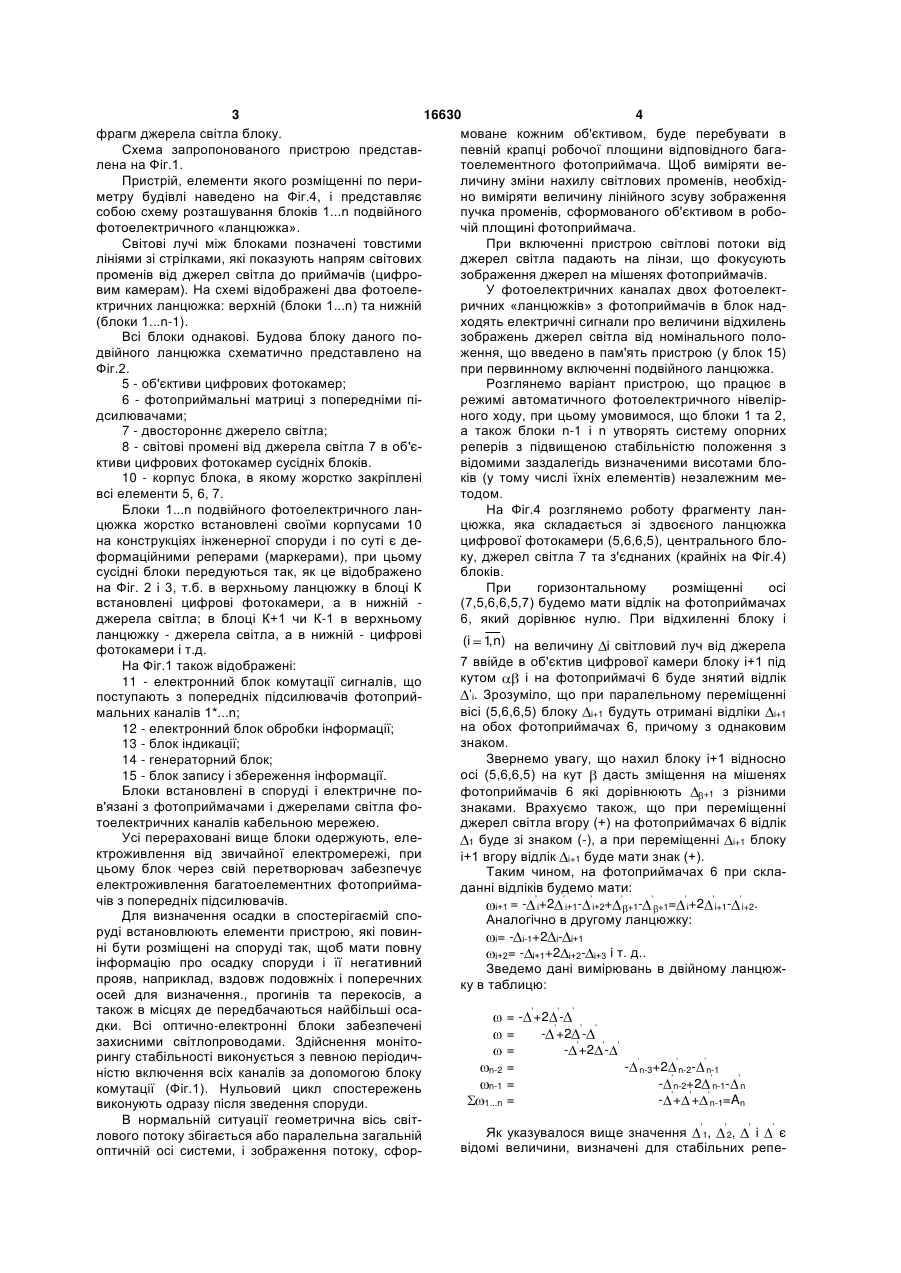
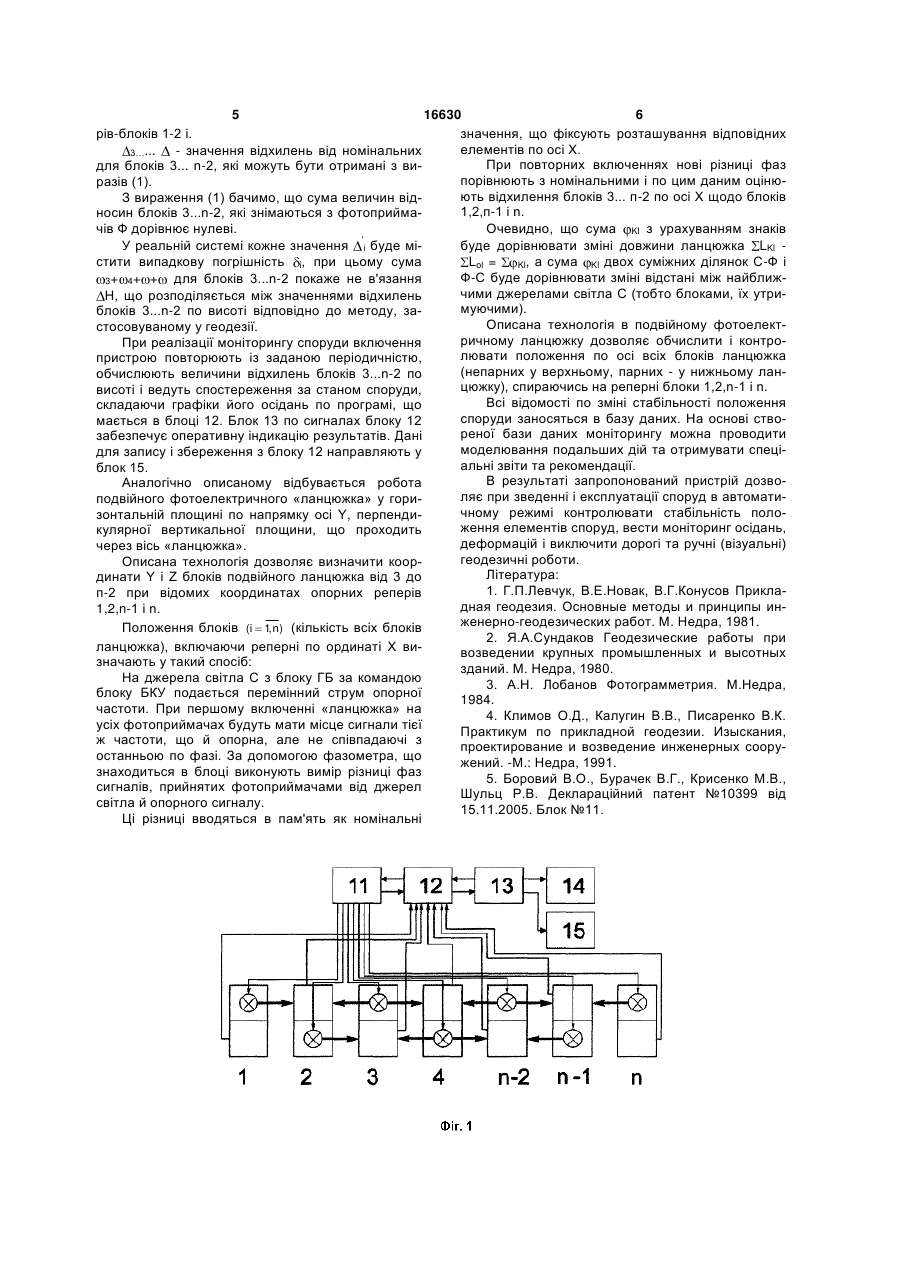
Пристрій для контролю точності положення елементів інженерної споруди, який містить фотоелектричні канали з елементами: джерела світла, об'єктиви, багатоелементні фотоприймачі, що створюють подвійний фотоелектричний ланцюжок, 3 16630 4 фрагм джерела світла блоку. моване кожним об'єктивом, буде перебувати в Схема запропонованого пристрою представпевній крапці робочої площини відповідного багалена на Фіг.1. тоелементного фотоприймача. Щоб виміряти веПристрій, елементи якого розміщенні по периличину зміни нахилу світлових променів, необхідметру будівлі наведено на Фіг.4, і представляє но виміряти величину лінійного зсуву зображення собою схему розташування блоків 1...n подвійного пучка променів, сформованого об'єктивом в робофотоелектричного «ланцюжка». чій площині фотоприймача. Світові лучі між блоками позначені товстими При включенні пристрою світлові потоки від лініями зі стрілками, які показують напрям світових джерел світла падають на лінзи, що фокусують променів від джерел світла до приймачів (цифрозображення джерел на мішенях фотоприймачів. вим камерам). На схемі відображені два фотоелеУ фотоелектричних каналах двох фотоелектктричних ланцюжка: верхній (блоки 1...n) та нижній ричних «ланцюжків» з фотоприймачів в блок над(блоки 1...n-1). ходять електричні сигнали про величини відхилень Всі блоки однакові. Будова блоку даного позображень джерел світла від номінального полодвійного ланцюжка схематично представлено на ження, що введено в пам'ять пристрою (у блок 15) Фіг.2. при первинному включенні подвійного ланцюжка. 5 - об'єктиви цифрових фотокамер; Розглянемо варіант пристрою, що працює в 6 - фотоприймальні матриці з попередніми пірежимі автоматичного фотоелектричного нівелірдсилювачами; ного ходу, при цьому умовимося, що блоки 1 та 2, 7 - двостороннє джерело світла; а також блоки n-1 і n утворять систему опорних 8 - світові промені від джерела світла 7 в об'єреперів з підвищеною стабільністю положення з ктиви цифрових фотокамер сусідніх блоків. відомими заздалегідь визначеними висотами бло10 - корпус блока, в якому жорстко закріплені ків (у тому числі їхніх елементів) незалежним мевсі елементи 5, 6, 7. тодом. Блоки 1...n подвійного фотоелектричного ланНа Фіг.4 розглянемо роботу фрагменту ланцюжка жорстко встановлені своїми корпусами 10 цюжка, яка складається зі здвоєного ланцюжка на конструкціях інженерної споруди і по суті є децифрової фотокамери (5,6,6,5), центрального блоформаційними реперами (маркерами), при цьому ку, джерел світла 7 та з'єднаних (крайніх на Фіг.4) сусідні блоки передуються так, як це відображено блоків. на Фіг. 2 і 3, т.б. в верхньому ланцюжку в блоці К При горизонтальному розміщенні осі встановлені цифрові фотокамери, а в нижній (7,5,6,6,5,7) будемо мати відлік на фотоприймачах джерела світла; в блоці К+1 чи К-1 в верхньому 6, який дорівнює нулю. При відхиленні блоку і ланцюжку - джерела світла, а в нижній - цифрові (i 1 n) на величину і світловий луч від джерела , фотокамери і т.д. 7 ввійде в об'єктив цифрової камери блоку і+1 під На Фіг.1 також відображені: кутом і на фотоприймачі 6 буде знятий відлік 11 - електронний блок комутації сигналів, що ’і. Зрозуміло, що при паралельному переміщенні поступають з попередніх підсилювачів фотоприйвісі (5,6,6,5) блоку i+1 будуть отримані відліки i+1 мальних каналів 1*...n; на обох фотоприймачах 6, причому з однаковим 12 - електронний блок обробки інформації; знаком. 13 - блок індикації; Звернемо увагу, що нахил блоку і+1 відносно 14 - генераторний блок; осі (5,6,6,5) на кут дасть зміщення на мішенях 15 - блок запису і збереження інформації. Блоки встановлені в споруді і електричне пофотоприймачів 6 які дорівнюють +1 з різними в'язані з фотоприймачами і джерелами світла фознаками. Врахуємо також, що при переміщенні тоелектричних каналів кабельною мережею. джерел світла вгору (+) на фотоприймачах 6 відлік Усі перераховані вище блоки одержують, еле1 буде зі знаком (-), а при переміщенні i+1 блоку ктроживлення від звичайної електромережі, при і+1 вгору відлік i+1 буде мати знак (+). цьому блок через свій перетворювач забезпечує Таким чином, на фотоприймачах 6 при склаелектроживлення багатоелементних фотоприймаданні відліків будемо мати: ’ ’ ’ ’ ’ ’ ’ ’ чів з попередніх підсилювачів. і+1 = - і+2 і+1- і+2+ +1+1= і+2 i+1- i+2. Для визначення осадки в спостерігаємій споАналогічно в другому ланцюжку: руді встановлюють елементи пристрою, які повинi= - і-1+2 і- і+1 ні бути розміщені на споруді так, щоб мати повну і+2= - і+1+2 і+2- і+3 і т. д.. інформацію про осадку споруди і її негативний Зведемо дані вимірювань в двійному ланцюжпрояв, наприклад, вздовж подовжніх і поперечних ку в таблицю: осей для визначення., прогинів та перекосів, а також в місцях де передбачаються найбільші оса= - ’+2 ’- ’ дки. Всі оптично-електронні блоки забезпечені = - ’+2 ’- ’ захисними світлопроводами. Здійснення моніто= - ’+2 ’- ’ рингу стабільності виконується з певною періодич- ’n-3+2 ’n-2- ’n-1 n-2 = ністю включення всіх каналів за допомогою блоку = - ’n-2+2 ’n-1- ’n n-1 комутації (Фіг.1). Нульовий цикл спостережень - ’+ ’+ ’n-1=An 1...n = виконують одразу після зведення споруди. В нормальній ситуації геометрична вісь світЯк указувалося вище значення ’1, ’2, ’ і ’ є лового потоку збігається або паралельна загальній відомі величини, визначені для стабільних репеоптичній осі системи, і зображення потоку, сфор 5 16630 6 рів-блоків 1-2 і. значення, що фіксують розташування відповідних елементів по осі X. - значення відхилень від номінальних 3…... При повторних включеннях нові різниці фаз для блоків 3... n-2, які можуть бути отримані з випорівнюють з номінальними і по цим даним оцінюразів (1). ють відхилення блоків 3... п-2 по осі Х щодо блоків З вираження (1) бачимо, що сума величин від1,2,п-1 і n. носин блоків 3...n-2, які знімаються з фотоприймаОчевидно, що сума Kl з урахуванням знаків чів Ф дорівнює нулеві. У реальній системі кожне значення ’i буде мібуде дорівнювати зміні довжини ланцюжка LKl стити випадкову погрішність i, при цьому сума Lol = Kl, а сума Kl двох суміжних ділянок С-Ф і Ф-С буде дорівнювати зміні відстані між найближдля блоків 3...n-2 покаже не в'язання 3+ 4+ + чими джерелами світла С (тобто блоками, їх утриН, що розподіляється між значеннями відхилень муючими). блоків 3...n-2 по висоті відповідно до методу, заОписана технологія в подвійному фотоелектстосовуваному у геодезії. ричному ланцюжку дозволяє обчислити і контроПри реалізації моніторингу споруди включення лювати положення по осі всіх блоків ланцюжка пристрою повторюють із заданою періодичністю, (непарних у верхньому, парних - у нижньому ланобчислюють величини відхилень блоків 3...n-2 по цюжку), спираючись на реперні блоки 1,2,n-1 і n. висоті і ведуть спостереження за станом споруди, Всі відомості по зміні стабільності положення складаючи графіки його осідань по програмі, що споруди заносяться в базу даних. На основі ствомається в блоці 12. Блок 13 по сигналах блоку 12 реної бази даних моніторингу можна проводити забезпечує оперативну індикацію результатів. Дані моделювання подальших дій та отримувати спецідля запису і збереження з блоку 12 направляють у альні звіти та рекомендації. блок 15. В результаті запропонований пристрій дозвоАналогічно описаному відбувається робота ляє при зведенні і експлуатації споруд в автоматиподвійного фотоелектричного «ланцюжка» у горичному режимі контролювати стабільність полозонтальній площині по напрямку осі Y, перпендиження елементів споруд, вести моніторинг осідань, кулярної вертикальної площини, що проходить деформацій і виключити дорогі та ручні (візуальні) через вісь «ланцюжка». геодезичні роботи. Описана технологія дозволяє визначити коорЛітература: динати Y і Z блоків подвійного ланцюжка від 3 до 1. Г.П.Левчук, В.Е.Новак, В.Г.Конусов Приклап-2 при відомих координатах опорних реперів дная геодезия. Основные методы и принципы ин1,2,n-1 і n. женерно-геодезических работ. М. Недра, 1981. Положення блоків (i 1, n) (кількість всіх блоків 2. Я.А.Сундаков Геодезические работы при ланцюжка), включаючи реперні по ординаті Х вивозведении крупных промышленных и высотных значають у такий спосіб: зданий. М. Недра, 1980. На джерела світла С з блоку ГБ за командою 3. А.Н. Лобанов Фотограмметрия. М.Недра, блоку БКУ подається перемінний струм опорної 1984. частоти. При першому включенні «ланцюжка» на 4. Климов О.Д., Калугин В.В., Писаренко В.К. усіх фотоприймачах будуть мати місце сигнали тієї Практикум по прикладной геодезии. Изыскания, ж частоти, що й опорна, але не співпадаючі з проектирование и возведение инженерных сооруостанньою по фазі. За допомогою фазометра, що жений. -М.: Недра, 1991. знаходиться в блоці виконують вимір різниці фаз 5. Боровий В.О., Бурачек В.Г., Крисенко М.В., сигналів, прийнятих фотоприймачами від джерел Шульц Р.В. Деклараційний патент №10399 від світла й опорного сигналу. 15.11.2005. Блок №11. Ці різниці вводяться в пам'ять як номінальні 7 Комп’ютерна верстка Н. Лисенко 16630 8 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for checking the accuracy of the position of an engineering structure
Автори англійськоюBorovyi Valentyn Oleksandrovych, Burachek Vsevolod Hermanovych, Krysenko Maksym Viktorovych, Riabchii Vladyslav Valeriiovych, Shults Roman Volodymyrovych
Назва патенту російськоюУстройство для контроля точности положения инженерного сооружения
Автори російськоюБоровый Валентин Александрович, Бурачек Вселовод Германович, Крысенко Максим Викторович, Рябчий Владислав Валериевич, Шульц Роман Владимирович
МПК / Мітки
МПК: G02B 13/08
Мітки: елементів, положення, інженерної, пристрій, споруди, точності, контролю
Код посилання
<a href="https://ua.patents.su/4-16630-pristrijj-kontrolyu-tochnosti-polozhennya-elementiv-inzhenerno-sporudi.html" target="_blank" rel="follow" title="База патентів України">Пристрій контролю точності положення елементів інженерної споруди</a>
Спосіб контролю точності положення елементів спорудження
Номер патенту: 14992
Опубліковано: 15.06.2006
Автори: Бойко Ігор Петрович, Бурачек Всеволод Германович, Шульц Роман Володимирович, Боровий Валентин Олександрович, Крисенко Максим Вікторович
МПК: G02B 13/08
Мітки: елементів, спорудження, положення, спосіб, точності, контролю
Формула / Реферат:
Спосіб контролю точності положення елементів спорудження, що заснований на фотоелектричному вимірюванні відхилень елементів спорудження в режимі фотоелектричного ланцюжка з вимірюваних елементів (джерело світла, лінза-об’єктив, фотоприймач, лінза-об’єктив, джерело світла і т.д.), який відрізняється тим, що вимірювання величин відхилень елементів спорудження виконують одночасно не менше ніж у двох аналогічних фотоелектричних ланцюжках, при...
Пристрій для контролю стабільності положення елементів споруди
Номер патенту: 10399
Опубліковано: 15.11.2005
Автори: Шульц Роман Володимирович, Бойко Ігор Петрович, Бурачек Всеволод Германович, Крисенко Максим Вікторович, Боровий Валентин Олександрович
МПК: G02B 13/08
Мітки: стабільності, положення, елементів, споруди, пристрій, контролю
Формула / Реферат:
Пристрій для контролю елементів споруди, що містить блоки світлових випромінювачів (БСВ), блоки лінз (БЛ), блоки фотоприймачів (БФ), який відрізняється тим, що всі блоки встановлені і жорстко закріплені на елементах споруди в точках, які знаходяться на контрольних осях споруди, при цьому БСВ та БФ виконані подвійними з орієнтуванням напрямків світлового випромінювання в парі випромінювачів на 180° і відповідно з орієнтуванням напрямків...
Пристрій для вирівнювання положення споруди
Номер патенту: 37365
Опубліковано: 15.05.2001
Автор: Живодьоров Микола Андрійович
МПК: E02D 35/00
Мітки: вирівнювання, положення, пристрій, споруди
Формула / Реферат:
1. Пристрій для вирівнювання положення споруди, що містить розташовану під опорною частиною споруди циліндричну ємність з отворами по периметру на рівні днища, яка заповнена термопластичним матеріалом і з'єднана з опорною частиною споруди поршнем, розміщеним над термопластичним матеріалом; тороїдальний запірний елемент, що примикає до циліндричної ємності, центральна площина якого поєднана з осями отворів, який відрізняється тим, що...
Пристрій для контролю положення гостряка стрілочного переводу
Номер патенту: 61688
Опубліковано: 17.11.2003
Автори: Парфьонов Сергій Володимирович, Парфьонов Володимир Іванович
МПК: B61L 7/00
Мітки: пристрій, переводу, контролю, гостряка, положення, стрілочного
Формула / Реферат:
Пристрій для контролю положення гостряка стрілочного переводу, який містить автогенератор з блоками змінної ємності, підключений до змішувача з гетеродином, вихід якого через підсилювач високої частоти, полосові фільтри та обмежувачі з'єднаний з двома частотними детекторами, виходи яких через підсилювачі низької частоти, тригери Шмідта, підключені до блоків індикації крайніх положень гостряка, який відрізняється тим, що блок змінної ємності...
Пристрій для контролю положення гостряка залізничної стрілки
Номер патенту: 61691
Опубліковано: 17.11.2003
Автори: Парфьонов Володимир Іванович, Парфьонов Сергій Володимирович
МПК: B61L 7/00
Мітки: пристрій, залізничної, положення, гостряка, стрілки, контролю
Формула / Реферат:
Пристрій для контролю положення гостряка залізничної стрілки, який містить зв'язаний з гостряком індуктивний датчик, підключений до генератора, з'єднаного з підсилювачем, вихід якого через фільтри, смугові підсилювачі та електронні ключі підключений до блоків індикації крайніх положень гостряка, який відрізняється тим, що він додатково має селективний фільтр, з'єднаний з смуговим підсилювачем, вихід якого через електронний ключ підключений до...
Попередній патент: Димовий пожежний сповіщувач
Наступний патент: Пристрій контролю точності положення елементів споруди
Випадковий патент: Спосіб механізованого дугового зварювання або наплавлення із модуляцією швидкості подачі електрода та регулюванням дуги