Бортовий секвентний радіолокатор для виявлення рухомих цілей на поверхні землі
Формула / Реферат
Бортовой секвентный радиолокатор для обнаружения движущихся целей на поверхности земли, содержащий приемо-передающую антенну с антенным переключателем, передатчик зондирующих периодических видеоимпульсных сигналов наносекундной длительности без несущей частоты, приемник и индикатор, отличающийся тем, что в состав радиолокатора дополнительно включены устройство сканирования антенны с датчиком азимута и угла места и гетеродин видеоимпульсных сигналов нано-секундной длительности с устройством изменения частоты следования Fг этих видеоимпульсов по соотношению
где F - частота следования зондирующих видеоимпульсов передатчика;
V - скорость полета;
с - скорость света;
q, b - угол места и азимутальный угол ориентации оси антенны,
на выходе приемника установлен диодный смеситель выходного напряжения приемника и напряжения гетеродина, выход смесителя связан с фильтром нижних частот с полосой пропускания от 2FVмин/c до 2fв2FVмин/c, где Vмин, Vмако - диапазон возможных скоростей наземных целей, fв - верхняя граничная частота полосы пропускания антенны, выход фильтра нижних частот связан с индикатором, а выход датчика азимута и угла места связан со входом устройства изменения частоты следования видеоимпульсов гетеродина.
Текст
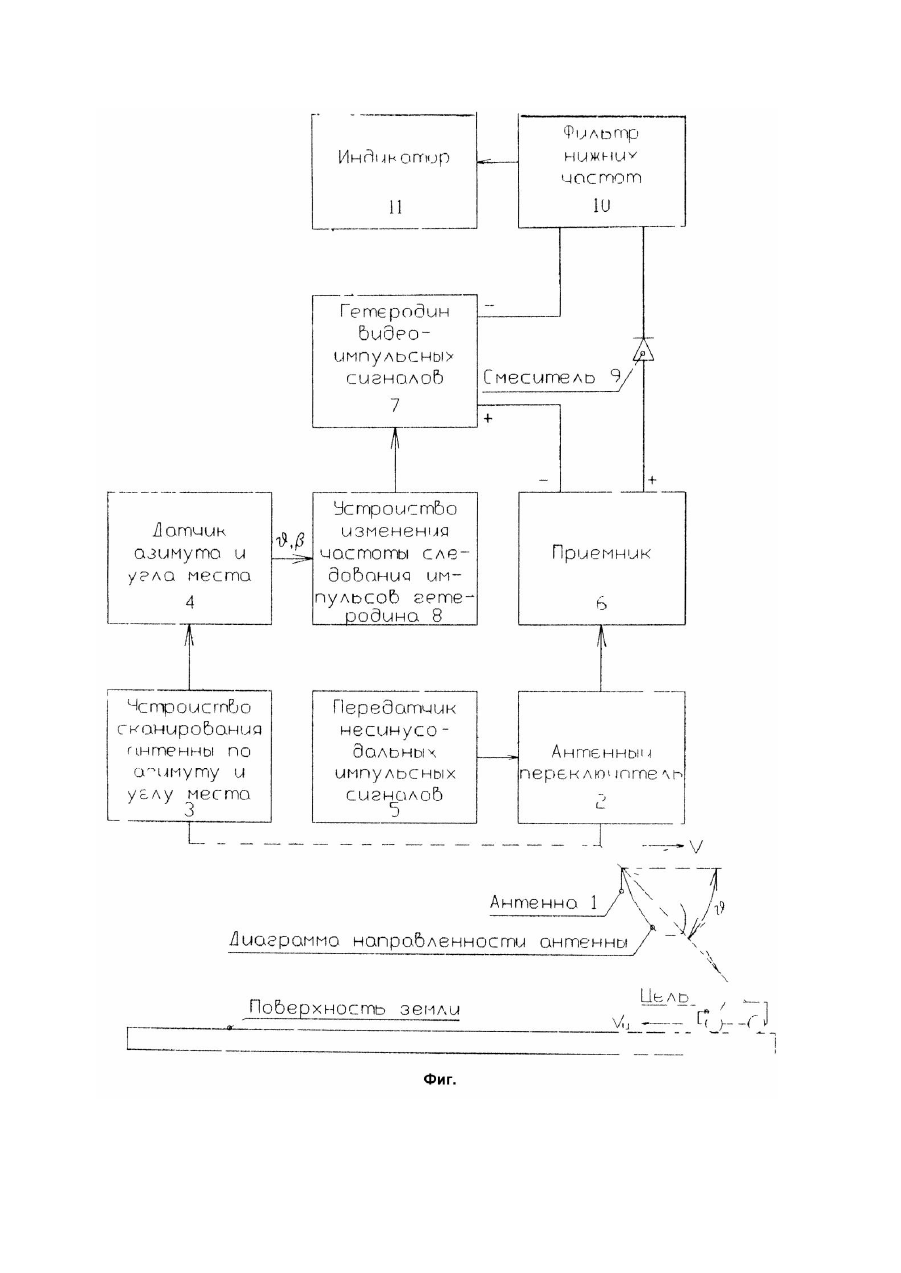
Изобретение относится к области радиолокации и может быть использовано в бортовых секвентных радиолокаторах с несинусоидальным импульсным сигналом в виде периодической последовательности видеоимпульсов поля радиоволн наносекундной длительности без несущей частоты для обнаружения наземных движущи хся целей (например, движущихся в лесу объектов) на фоне пассивных помех от земли. Известен вертолетный секвентный радиолокатор ледовой разведки [1, с.42, 43, рис.1.6.9]. Это радиолокатор излучает зондирующий сигнал в виде периодических видеоимпульсов наносекундной длительности без несущей частоты. Бортовая приемо-передающая антенна направлена вертикально вниз и переключается с передачи на прием с помощью антенного переключателя. Сканирование диаграммы направленности по азимуту и углу места не предусмотрено. Для усиления сигналов в радиолокаторе использован приемник в виде широкополосного усилителя видеоимпульсов. Принятые эхо-сигналы наблюдают с помощью индикатора. Недостатком этого аналога является то, что радиолокатор не защищен от пассивных помех от подстилающей поверхности и эти помехи мешают работе радиолокатора. В качестве прототипа выбран самолетный секвентный радиолокатор [1]. В состав прототипа входят следующие основные элементы: бортовая приемо-передающая антенна с антенным переключателем для переключения этой антенны с передачи на прием; передатчик периодических наносекундных видеоимпульсов без несущей частоты; приемник в виде широкополосного усилителя видеоимпульсов индикатор для наблюдения принятых эхо-сигналов. Бортовая антенна прототипа направлена вертикально вниз, а сканирование диаграммы направленности этой антенны по азимуту и углу места не предусмотрено. Недостатком прототипа является то, что этот радиолокатор не защищен от пассивных помех от земли и такие пассивные помехи мешают обнаруживать цели вблизи земной поверхности. В основу изобретения поставлена задача усовершенствования бортового секвентного радиолокатора для обнаружения движущихся целей на поверхности земли, в котором за счет дополнительного включения в состав радиолокатора устройства сканирования антенны по угловым координатам, гетеродина видеоимпульсных сигналов, диодного смесителя сигналов приемника и гетеродина и фильтра нижних частот обеспечивается обнаружение движущи хся целей вблизи земной поверхности и улучшается помехозащищенность бортового радиолокатора от пассивных помех от земли. Поставленная задача решается тем, что в бортовом секвентном радиолокаторе для обнаружения движущихся целей на поверхности земли, содержащем приемо-передающую антенну с антенным переключателем, передатчик зондирующи х периодических видеоимпульсных сигналов наносекундной длительности без несущей частоты, приемник и индикатор, согласно изобретению в состав радиолокатора дополнительно включены устройство сканирования антенны с датчиком азимута и угла места и гетеродин видеоимпульсных сигналов наносекундной длительности с устройством изменения частоты следования видеоимпульсов по соотношению Fг этих где F - частота следования зондирующи х видеоимпульсов передатчика; V - скорость полета; c - скорость света; q, b - угол места и азимутальный угол ориентации оси антенны, на выходе приемника установлен диодный смеситель выходного напряжения приемника и напряжения гетеродина, выход смесителя связан с фильтром нижних частот с полосой пропускания от где Vмин , Vмако - диапазон возможных скоростей наземных целей; fв - вер хняя граничная частота полосы пропускания антенны, выход фильтра нижних частот связан с индикатором, а выход датчика азимута и угла места связан со входом устройства изменения частоты следования видеоимпульсов гетеродина. При этом частота следования F зондирующи х видеоимпульсов передатчика значительно больше максимальной допплеровской частоты эхо-сигнала движущейся цели на верхней частоте спектра излучаемого зондирующего сигнала бортовая антенна должна иметь, по возможности, узкую диаграмму направленности, а диод смесителя должен иметь примерно квадратичную вольт-амперную характеристику. Полагается также, что амплитуда видеоимпульса гетеродина значительно больше выходного напряжения приемника. Дополнительное включение в состав радиолокатора устройства сканирования антенны по угловым координатам, гетеродина видеоимпульсных сигналов, диодного смесителя сигналов приемника и гетеродина и фильтра нижних частот обеспечивает выделение эхосигнала движущейся цели на выходе фильтра нижних частот, что позволяет обнаруживать движущиеся цели на поверхности земли и защищает радиолокатор от пассивных помех от земной поверхности. Предложенное устройство позволяет обнаруживать движущиеся цели вблизи земной поверхности (в том числе и в лесу) с борта летательного аппарата на фоне пассивных помех от земли, но не предназначено для обнаружения неподвижных и подземных целей. Техническая сущность и принцип действия предложенного устройства поясняются рисунком на фиг., где представлена упрощенная структурная схема предложенного бортового радиолокатора, а также условно показаны диаграмма направленности бортовой антенны, поверхность земли и наземная движущаяся цель. В состав предложенного устройства на схеме фиг. входят следующие основные элементы: - бортовая приемо-передающая антенна 1; - антенный переключатель 2 для переключения антенны с передачи на прием; - устройство 3 сканирования диаграммы направленности антенны 1 по азимуту b и углу места q относительно направления полета с датчиком азимута и угла места 4; - передатчик 5 несинусоидальных импульсных сигналов в виде периодической последовательности наносекундных видеоимпульсов с высокой частотой следования импульсов F без несущей частоты; - приемник 6 в виде широкополосного усилителя наносекундных видеоимпульсов; - гетеродин 7 видеоимпульсных сигналов наносекундной длительности с устройством 8 изменения частоты следования Fг видеоимпульсов гетеродина (частота следования Fг изменяется по соотношению (1) в зависимости от угловой ориентации оси антенны и скорости полета V); - смеситель 9 сигналов приемника и гетеродина в виде диода с квадратичной вольтамперной характеристикой (приемник 6 и гетеродин 7 подключены к смесителю последовательно с соответствием полярности сигналов полярности включения диода); фильтр нижних частот 10 для отфильтровывания допплеровского спектра эхосигналов движущейся цели и подавления пассивных помех от земли; - индикатор 11 для наблюдения эхо-сигналов цели. Принцип действия предложенного устройства поясняется следующим. Антенна 1 излучает периодический широкополосный зондирующий сигнал, спектр которого занимает полосу частот от F до fв, а количество гармоник спектра равно N = -fв/F. Для подавления пассивных помех от земли использован эффект Допплера. Этот эффект приводит к тому, что каждая составляющая спектра эхо-сигнала движущейся цели приобретает свое допплеровское смещение частоты FДЦn, равное а каждая составляющая спектра пассивной помехи от земли будет иметь свой допплеровский сдвиг частоты FДЦ n, равный где n - номер гармоники спектра сигналов и помех; F -частота следования зондирующих видеоимпульсов; c - скорость света; VгЦ - радиальная составляющая скорость движущейся цели; Vг - радиальная составляющая проекции скорости полета на направления луча радиоволн в точку наблюдения, равная где V - скорость полета; q, b - угол места и азимутальный угол точки наблюдения относительно направления полета. Допплеровский сдвиг частоты для всех составляющих спектра пассивной помехи от земли FДЦn известен, так как известна скорость полета и угловое направление оси антенны q, b а допплеровский сдвиг для составляющих спектра эхо-сигнала движущейся цели не известен и отличается от допплеровского сдвига пассивной помехи. Эти различия предлагается использовать для подавления пассивной помехи и выделения допплеровского спектра эхо-сигнала движущейся цели. Для реализации этого предлагается смешать выходное напряжение приемника 4 с напряжением гетеродина 7, спектр сигнала которого идентичен спектру пассивной помехи от земли, с помощью диодного смесителя 9 с квадратичной вольтамперной характеристикой. Для того, чтобы спектр сигнала гетеродина 7 был идентичен известному спектру пассивной помехи от земли, необходимо выбрать частоту следования наносекундных видеоимпульсов гетеродина Fг в соответствии с соотношением (1), которое получено на основе соотношений (6), (7). При таком выборе частоты следования видеоимпульсов гетеродина Fг допплеровский спектр пассивной помехи на выходе смесителя 9 будет отсутствовать, а допплеровский спектр эхо-сигнала движущейся цели будет выделен. При этом допплеровский спектр эхо-сигнала движущейся цели на выходе смесителя 9 будет состоять из N гармоник в интервале частот от 2VгЦF/c до 2VгЦNF/c = 2VгЦfв /c где VгЦ - радиальная скорость цели; fв верхняя граничная частота полосы пропускания антенны. Для выделения допплеровского спектра эхо-сигнала движущейся цели и подавления пассивной помехи от земли использован фильтр нижних частот 10, полоса пропускания которого определена соотношениями (2), (3). Такая полоса необходима для того, чтобы гармоники спектра пассивной помехи и гетеродина подавлялись этим фильтром и не мешали обнаруживать движущуюся цель. Для того, чтобы эти гармоники не попадали в полосу пропускания фильтра 10, требуется выполнить ограничение (4) на частоту следования F зондирующих видеоимпульсов передатчика, то есть требуется выбрать достаточно высокую частоту следования f (порядка МГц). Ограничение (4) обычно всегда легко выполняется. Проведенные расчеты показали что допплеровский спектр эхо-сигнала движущейся цели на выходе фильтра 10 образует видеоимпульсы миллисекундной длительности, которые можно наблюдать на индикаторе 11. Наличие этих видеоимпульсов будет свидетельствовать о наличии движущейся цели. При этом координаты наземной цели можно легко определить по угловому положению антенны и известной высоте полета болта. Следует отметить, что длительность выделенных допплеровских видеоимпульсов цели на выходе фильтра 10 содержит также информацию о радиальной скорости движущейся цели. Устройство 8 изменения частоты следования видеоимпульсов гетеродина 7 по закону (1) принципиально необходимо для обеспечения идентичности спектра сигнала гетеродина с известным спектром пассивной помехи от земли. Такая идентичность требуется для подавления пассивной помехи с помощью смесителя 9 и фильтра 10. Для управления устройством 8 на его вход управления подается информация об угловом положении антенны с датчика 4 азимута и угла места антенны, Кроме того, требуется также информация о скорости полета борта V. Таким образом, предложенное устройство может быть практически реализовано, а отмеченные выше отличительные признаки являются существенными и принципиально необходимы для реализации этого устройства. Основные элементы предложенного устройства на схеме чертежа выполнены следующим образом. Антенна 1, передатчик 5 и приемник 6 выполнены для излучения и приема наносекундных видеоимпульсных сигналов без несущей часто ты. Такие системы могут быть практически реализованы, так как физические основы и принципы их построения известны и описаны в литературе [1]. Антенный переключатель 2 закорачивает вход приемника 6 во время передачи зондирующих видеоимпульсов и может быть выполнен в виде широкополосного твердотельного переключателя. Устройство 3 сканирования антенны в секторе обзора земной поверхности с датчиком 4 азимута и угла места оси антенны может быть выполнено, например, в виде электромеханического устройства перемещения антенны. Антенна 1 может быть выполнена, например, в виде зеркальной антенны с металлическим параболическим зеркалом и коротким вибраторным облучателем, запитываемым коаксиальным кабелем. Приемник 6 представляет широкополосный усилитель видеоимпульсов наносекундной длительности. Гетеродин 7 представляет маломощный генератор наносекундных видеоимпульсов, частота следования которых Fг задается устройством 8 изменения частоты следования по закону (1). Для этого на вход управления устройства 8 подается информация об угловом направлении оси антенны (углы q, b), а используется известная информация о скорости полета борта V и частоте следования F зондирующи х видеоимпульсов передатчика, Амплитуда видеоимпульсов гетеродина 7 должна быть значительно больше выходного напряжения приемника 6 (это способствует подавлению пассивных помех от земли). Смеситель 9 выполнен на диоде с квадратичной вольтамперной характеристикой. Напряжения с выхода приемника 6 и гетеродина 7 подключены к смесителю с одинаковой полярностью. Это позволяет выполнить смеситель 9 на одном диоде, Фильтр нижних частот 10 имеет полосу пропускания, определенную соотношениями (2), (3). Индикатор 11 аналогичен индикатору прототипа. Динамика работы предложенного устройства осуществляется следующим образом. Передатчик 5 формирует, а антенна 1 излучают в сторону цели зондирующий сигнал в виде видеоимпульсов поля радиоволн наносекундной длительности без несущей часто ты с высокой (порядка МГц) частотой следования импульсов. Антенна 1 принимает эхо-сигналы движущейся цели и пассивные помехи от земли. Допплеровский сдвиг эхо-сигнала движущейся цели отличается от известного допплеровского сдвига пассивных помех от земли. Гетеродин 7 генерирует наносекундные видеоимпульсы, частота следования которых Fг определена направлением антенны относительно направления полета (углами q, b) и значениями F, V и выбрана с помощью устройства 8 по соотношению (1). При этом спектр сигнала гетеродина 7 идентичен известному спектру пассивной помехи от земли. Устройство 3 сканирования антенны 1 осуществляет сканирование антенны в секторе обзора земной поверхности, а датчик 4 азимута и угла, места оси антенны выдает информацию о направлении антенны для устройства 8 изменения частоты следования видеоимпульсов гетеродина 7. Этим поддерживается идентичность спектров сигналов гетеродина и пассивной помехи от земли при сканировании антенны. Сигналы с выхода приемника 6 и гетеродина 7 смешивают с помощью диодного смесителя 9. При этом на выходе смесителя 9 выделяют допплеровский спектр эхосигнала движущейся цели, а допплеровский спектр пассивной помехи от земли на выходе смесителя 9 будет отсутствовать ввиду идентичности спектров гетеродина и пассивной помехи. Фильтр нижних частот 10 выделяет допплеровский спектр эхосигнала движущейся цели и подавляет гармоники спектра пассивной помехи от земли и гармоники спектра гетеродина 7. Этим обеспечивается выделение эхо-сигнала цели и подавление пассивных помех от земли. Отфильтрованный допплеровский спектр эхо-сигнала движущейся цели образует видеоимпульсы миллисекундной длительности, которые наблюдаются на индикаторе 11 и свидетельствуют о наличии движущейся цели в заданном направлении антенны. Таким образом, предложенное устройство устраняет отмеченные недостатки аналога и прототипа и обеспечивает обнаружение наземных движущи хся целей на фоне пассивных помех от земли.
ДивитисяДодаткова інформація
Назва патенту англійськоюAirborne sequential radar for reveal of movable targets on surface of earth
Автори англійськоюZhukov Serhii Anatoliiovych
Назва патенту російськоюБортовой секвентный радиолокатор для выявления подвижных целей на поверхности земли
Автори російськоюЖуков Сергей Анатольевич
МПК / Мітки
МПК: G01S 13/06
Мітки: виявлення, радіолокатор, бортовий, поверхні, секвентний, землі, рухомих, цілей
Код посилання
<a href="https://ua.patents.su/4-17458-bortovijj-sekventnijj-radiolokator-dlya-viyavlennya-rukhomikh-cilejj-na-poverkhni-zemli.html" target="_blank" rel="follow" title="База патентів України">Бортовий секвентний радіолокатор для виявлення рухомих цілей на поверхні землі</a>
Бортовий секвентний радіолокатор виявлення об’єктів поблизу земної поверхні
Номер патенту: 17471
Опубліковано: 06.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: об'єктів, поверхні, бортовий, секвентний, земної, виявлення, поблизу, радіолокатор
Формула / Реферат:
Бортовой секвентный радиолокатор обнаружения объектов вблизи земной поверхности, содержащий приемо-передающую антенну с антенным переключателем, приемник и передатчик несинусоидальных сигналов в виде периодических прямоугольных видеоимпульсов наносекундной длительности с высокой частотой следования импульсов отличающийся тем, что на выходе приемника установлен полосовой фильтр с полосой пропускания от нижней частоты равной до верхней...
Секвентний радіолокатор для виявлення маловисотної цілі
Номер патенту: 17461
Опубліковано: 06.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: виявлення, цілі, радіолокатор, маловисотної, секвентний
Формула / Реферат:
Секвентный радиолокатор для обнаружения маловысотной цели, содержащий передатчик видеоимпульсов поля радиоволн наносекундной длительности без несущей частоты, приемо-передающую антенну с антенным переключателем, приемник и индикатор, отличающийся тем, что в состав радиолокатора дополнительно включен наземный пеленгатор бортового источника радиоизлучения цели по углу места q со своей антенной системой, на выходе приемника радиолокатора...
Бортовий радіолокатор підповерхневого зондування з пристроєм захисту від пасивних перешкод
Номер патенту: 17472
Опубліковано: 06.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: пристроєм, радіолокатор, захисту, підповерхневого, бортовий, пасивних, зондування, перешкод
Формула / Реферат:
Бортовой радиолокатор подповерхностного зондирования с устройством защиты от пассивных помех, содержащий бортовую приемо-передающую антенну, ось которой направлена вертикально вниз, антенный переключатель, передатчик периодических видеоимпульсов наносекундной длительности без несущей частоты, приемник и индикатор, отличающийся тем, что на выходе приемника установлен широкополосный усилитель видеоимпульсов с входным и выходным устройствами...
Спосіб захисту наземної рлс від пасивних перешкод

Номер патенту: 13919
Опубліковано: 25.04.1997
Автори: Бахвалов Борис Миколайович, Осипа Володимир Олександрович, Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: спосіб, пасивних, захисту, перешкод, наземної, рлс
Формула / Реферат:
Способ защиты наземной РЛС от пассивных помех, заключающийся в излучении зондирующих сигналов, приеме эхо-сигналов, задержке эхо-сигнала и вычитании задержанного сигнала из принимаемого в данный момент сигнала, отличающийся тем, что излучают несинусоидальный импульсный сигнал в виде периодической последовательности видеоимпульсов одинаковой полярности длительностью менее 1 нс без несущей частоты, а время задержки эхо-сигнала выбирают...
Спосіб вимирювання кута місця цілі для наземного секвентного радіолокатора
Номер патенту: 13417
Опубліковано: 16.12.1996
Автори: Жуков Сергій Анатолійович, Родін Олександр Валерійович, Бахвалов Борис Миколайович
МПК: G01S 17/06
Мітки: наземного, місця, спосіб, кута, вимірювання, секвентного, радіолокатора, цілі
Формула / Реферат:
Способ измерения угла места цели для наземного секвентного радиолокатора, заключающийся в излучении зондирующего сигнала в виде видеоимпульса поля радиоволн наносекундной длительности без несущей частоты и приеме эхо-сигналов воздушной цели, отличающийся тем, что вместе с целью облучают земную поверхность, измеряют время запаздывания t3 друг относительно друга отрицательных видеоимпульсов эхо-сигнала цели и длительность t отрицательного...
Попередній патент: Секвентний радіолокатор для виявлення маловисотної цілі
Наступний патент: Секвентний вимірювач кута місця і швидкості цілі з пристроєм захисту від пасивних перешкод
Випадковий патент: Спосіб регулювання теплосприймання випарної поверхні нагріву котла