Секвентний вимірювач кута місця і швидкості цілі з пристроєм захисту від пасивних перешкод
Формула / Реферат
Секвентный измеритель угла места и скорости цели с устройством защиты от пассивных помех, содержащий приемо-передающую антенну с антенным переключателем, передатчик периодических видеоимпульсов наносекундной длительности и приемник, отличающийся тем, что передатчик выполнен с частотой следования F зондирующих импульсов значительно большей максимальной допплеровской частоты на верхней граничной частоте fв полосы пропускания антенны, на выходе приемника дополнительно установлен широкополосный усилитель видеоимпульсов с входным и выходным устройством связи и обратной связью в виде управляемой линии задержки с устройством изменения длины линии, на выходе этого усилителя установлен измеритель времени запаздывания tз друг относительно друга видеоимпульсов эхо-сигналов цели прямой и дважды отраженной от земли радиоволн, выход этого измерителя связан с вычислителем угла места цели q по соотношению
на выходе приемника установлено также устройство вычитания зондирующего сигнала со второго выхода передатчика из выходного напряжения приемника, на выходе устройства вычитания установлен смеситель сигналов передатчика и приемника в виде диода с квадратичной вольт-амперной характеристикой, выход этого смесителя связан с фильтром нижних частот, полоса пропускания которого имеет величину от минимальной допплеровской частоты на частоте следования зондирующих импульсов до максимальной допплеровской частоты на верхней граничной частоте полосы пропускания антенны, на выходе этого фильтра установлен измеритель длительности импульса t, выход этого измерителя связан с вычислителем радиальной скорости цели Vr из уравнения
и длины L управляемой линии задержки по соотношению
где L - длина управляемой линии задержки;
Vл - скорость распространения радиоволн в этой линии;
Vr - радиальная скорость цели;
c - скорость света;
N - количество гармоник спектра зондирующего сигнала;
fв - верхняя граничная частота полосы пропускания антенны;
F - частота следования зондирующих видеоимпульсов;
n - текущий номер гармоники спектра сигнала;
t - длительность видеоимпульса на выходе фильтра нижних частот;
tз - время запаздывания друг относительно друга видеоимпульсов эхо-сигналов цели одинаковой полярности прямой и дважды отраженной от земли радиоволн на выходе усилителя с обратной связью;
h - высота подъема антенны над землей;
q - угол места цели;
a - выход вычислителя связан со входом управления устройства изменения длины линии задержки.
Текст
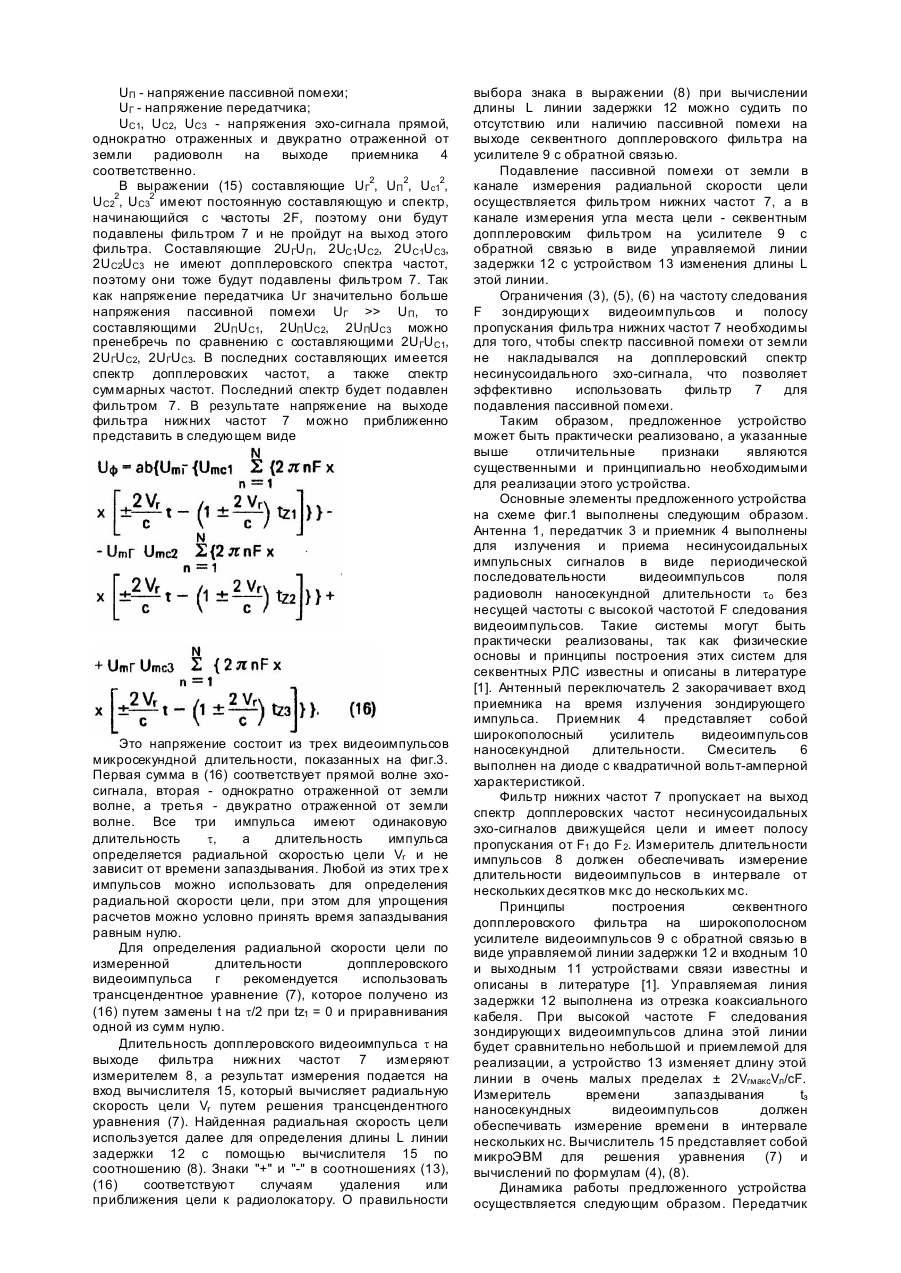
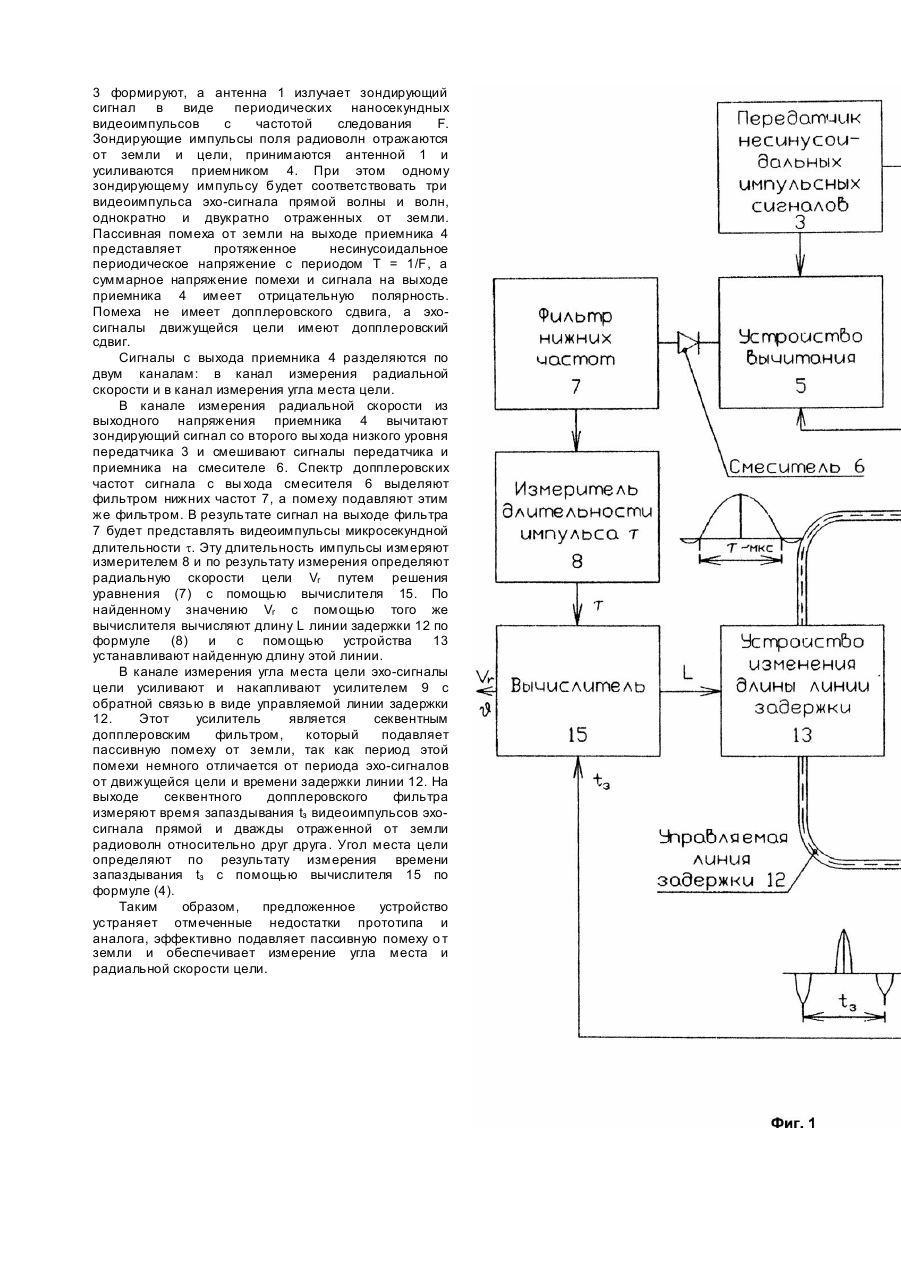
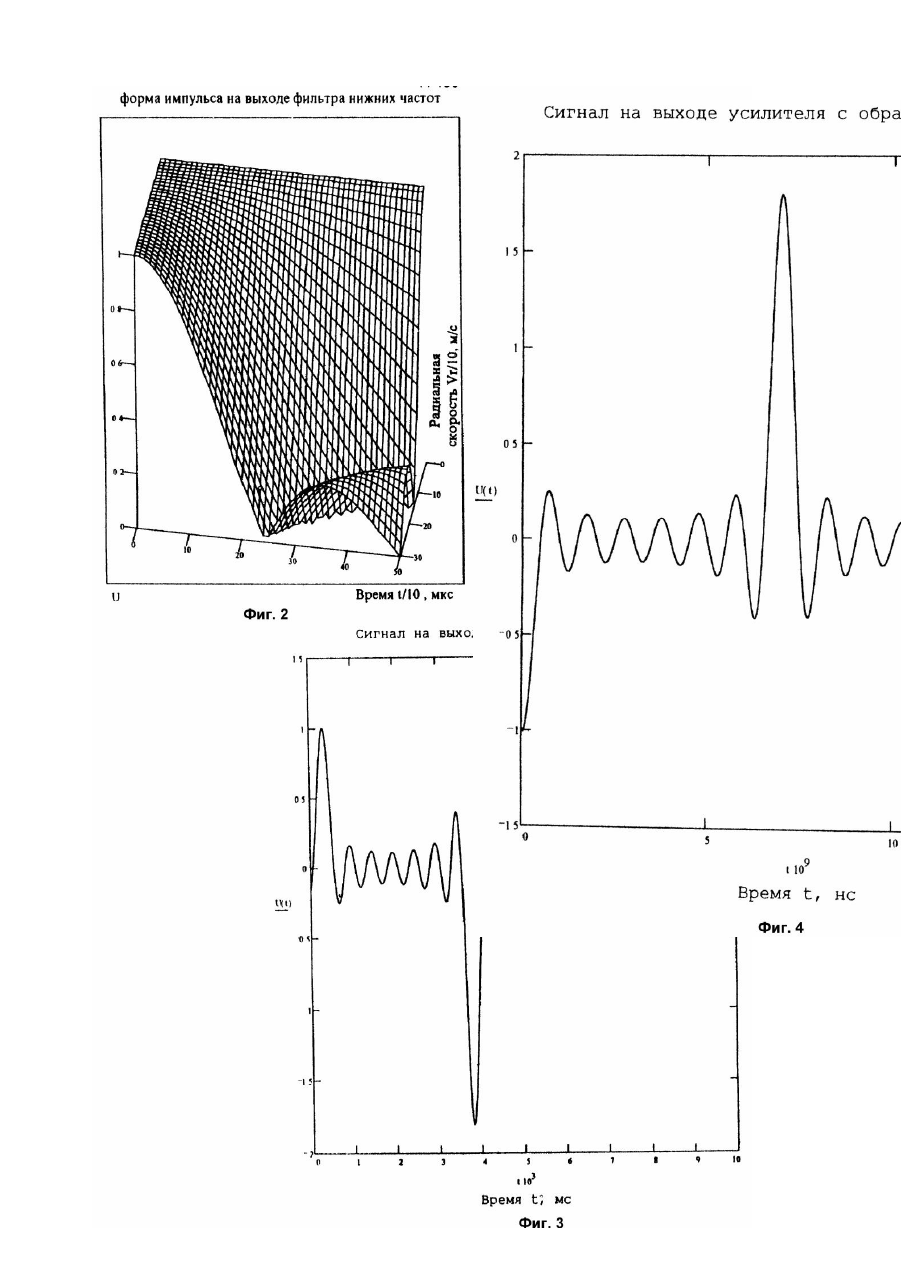
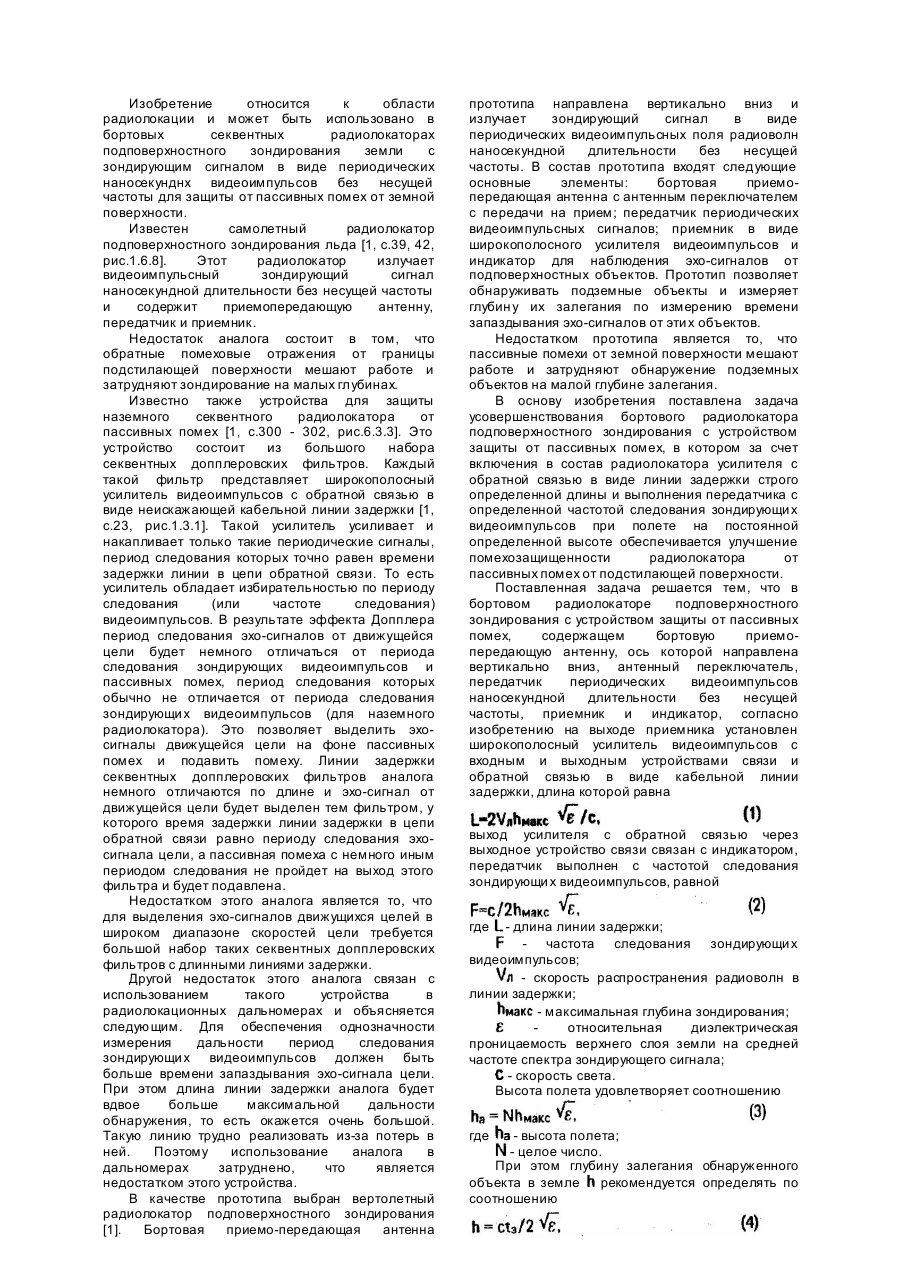
Изобретение относится к области радиолокации и может быть использовано в секвентных наземных РЛС с несинусоидальным импульсным зондирующим сигналом в виде периодической последовательности видеоимпульсов поля радиоволн наносекундной длительности без несущей частоты для измерения угла места и радиальной скорости цели на фоне пассивных помех от земли. Известен измеритель радиальной скорости цели для секвентного радиолокатора [1, с.300 - 302, рис.6.3.3]. Такой радиолокатор излучает периодические видеоимпульсы с высокой частотой следования F без несущей часто ты. На выходе приемника установлен измеритель радиальной скорости цели. Этот измеритель представляет набор допплеровских фильтров для несинусоидального видеоимпульсного сигнала. Каждый такой фильтр представляет собой широкополосный усилитель видеоимпульсов с обратной связью в виде кабельной линии задержки [1, с.23, рис.1.3.1]. Такой усилитель содержит следующие элементы: широкополосный усилитель наносекундных видеоимпульсов, входное устройство связи, выходное устройство связи и линию задержки сигнала на период следования импульсов, которая образует петлю обратной связи усилителя. Такой усилитель работает следующим образом. Видеоимпульс сигнала через входное устройство связи поступает на вход усилителя, усиливается и через выходное устройство связи попадает на вход неискажающей линии задержки, выполненной из отрезка коаксиального кабеля. Время задержки линии задержки должно быть точно равно периоду следования усиливаемых видеоимпульсов. Импульс с выхода усилителя задерживается линией задержки на период следования и через входное устройство связи снова поступает на вход усилителя. В это же время на вход усилителя через входное устройство связи поступает второй импульс периодической последовательности. Эти импульсы складываются, снова усиливаются усилителем и процесс повторяется. В результате усилитель с обратной связью накапливает и усиливает периодически повторяющиеся видеоимпульсы. Такой усилитель усиливает только такие видеоимпульсы, период следования которых точно равен времени задержки линии в цепи обратной связи. То есть усилитель обладает избирательностью по периоду следования (или частоте следования) импульсов. В результате слабые импульсы эхосигнала могут быть накоплены и результирующий сигнал можно выделить на выходе вы ходного устройства связи на фоне собственных шумов, помех и други х сигналов с иным периодом следования импульсов. Пассивная помеха от земли представляет собой периодическое напряжение с периодом следования Т = 1/F, где F - частота следования зондирующи х видеоимпульсов. В результате эффекта Допплера период следования видеоимпульсов эхо-сигнала от движущейся цели будет отличаться от периода следования пассивной помехи от земли на время Dt, равное где Vr - радиальная скорость цели; c - скорость света. Допплеровские фильтры аналога представляют собой описанные выше усилители с обратной связью. Линии задержки этих усилителей имеют разную длину T, T ± Dt, T ± 2Dt, T ± 3Dt, и т.д. Радиальную скорость цели определяют по номеру фильтра, на выходе которого появится эхо-сигнал цели. При этом пассивная помеха от земли будет выделена только на выходе фильтра, у которого время задержки линию равно T, и отсутствует на вы ходе други х фильтров. То есть аналог не только позволяет определять радиальную скорость цели, но и защищает радиолокатор от пассивных помех. Аналог должен иметь очень высокую частоту следования зондирующи х импульсов, так как при низкой частоте F длина линий задержки допплеровских фильтров будет очень большой и устройство становится нереализуемым. Недостатком этого аналога является то, что такое устройство должно иметь очень большое количество допплеровских фильтров в виде усилителей с обратной связью. При малом количестве фильтров узок диапазон измерения скоростей, либо ухудшаются точность измерений и помехозащиты. В качестве прототипа выбран секвентный радиолокатор с разнесенной антенной системой для измерения угловой координаты цели [1]. Такое радиолокатор содержит разнесенную антенную систему из двух или более антенн, передатчик периодических видеоимпульсных сигналов наносекундной длительности и приемники. Одна из антенн является приемо-передающей и содержит антенный переключатель для переключения ее от передатчика к приемнику, а другая антенная работает только на прием. Каждая антенна связана со своим приемником. Определение угловой координаты цели в прототипе осуществляют по измерению дальностей r1, r2 от разнесенных антенн до цели по соотношению где b - угловая координата цели; D - расстояние между антеннами. При этом дальности r1, r2 определяют по времени запаздывания эхо-сигналов цели в первой и второй антеннах относительно зондирующего импульса. Для однозначного определения дальностей в прототипе необходимо, чтобы частота следования зондирующи х импульсов F была F > UП, то составляющими 2UПUC1, 2UПUC2, 2UПUC3 можно пренебречь по сравнению с составляющими 2UГUC1, 2UГUC2, 2UГUC3. В последних составляющих имеется спектр допплеровских частот, а также спектр суммарных частот. Последний спектр будет подавлен фильтром 7. В результате напряжение на выходе фильтра нижних частот 7 можно приближенно представить в следующем виде Это напряжение состоит из трех видеоимпульсов микросекундной длительности, показанных на фиг.3. Первая сумма в (16) соответствует прямой волне эхосигнала, вторая - однократно отраженной от земли волне, а третья - двукратно отраженной от земли волне. Все три импульса имеют одинаковую длительность t, а длительность импульса определяется радиальной скоростью цели Vr и не зависит от времени запаздывания. Любой из этих тре х импульсов можно использовать для определения радиальной скорости цели, при этом для упрощения расчетов можно условно принять время запаздывания равным нулю. Для определения радиальной скорости цели по измеренной длительности допплеровского видеоимпульса г рекомендуется использовать трансцендентное уравнение (7), которое получено из (16) путем замены t на t/2 при tz1 = 0 и приравнивания одной из сумм нулю. Длительность допплеровского видеоимпульса t на выходе фильтра нижних частот 7 измеряют измерителем 8, а результат измерения подается на вход вычислителя 15, который вычисляет радиальную скорость цели Vr путем решения трансцендентного уравнения (7). Найденная радиальная скорость цели используется далее для определения длины L линии задержки 12 с помощью вычислителя 15 по соотношению (8). Знаки "+" и "-" в соотношениях (13), (16) соответствуют случаям удаления или приближения цели к радиолокатору. О правильности выбора знака в выражении (8) при вычислении длины L линии задержки 12 можно судить по отсутствию или наличию пассивной помехи на выходе секвентного допплеровского фильтра на усилителе 9 с обратной связью. Подавление пассивной помехи от земли в канале измерения радиальной скорости цели осуществляется фильтром нижних частот 7, а в канале измерения угла места цели - секвентным допплеровским фильтром на усилителе 9 с обратной связью в виде управляемой линии задержки 12 с устройством 13 изменения длины L этой линии. Ограничения (3), (5), (6) на частоту следования F зондирующи х видеоимпульсов и полосу пропускания фильтра нижних частот 7 необходимы для того, чтобы спектр пассивной помехи от земли не накладывался на допплеровский спектр несинусоидального эхо-сигнала, что позволяет эффективно использовать фильтр 7 для подавления пассивной помехи. Таким образом, предложенное устройство может быть практически реализовано, а указанные выше отличительные признаки являются существенными и принципиально необходимыми для реализации этого устройства. Основные элементы предложенного устройства на схеме фиг.1 выполнены следующим образом. Антенна 1, передатчик 3 и приемник 4 выполнены для излучения и приема несинусоидальных импульсных сигналов в виде периодической последовательности видеоимпульсов поля радиоволн наносекундной длительности to без несущей частоты с высокой частотой F следования видеоимпульсов. Такие системы могут быть практически реализованы, так как физические основы и принципы построения этих систем для секвентных РЛС известны и описаны в литературе [1]. Антенный переключатель 2 закорачивает вход приемника на время излучения зондирующего импульса. Приемник 4 представляет собой широкополосный усилитель видеоимпульсов наносекундной длительности. Смеситель 6 выполнен на диоде с квадратичной вольт-амперной характеристикой. Фильтр нижних частот 7 пропускает на выход спектр допплеровских частот несинусоидальных эхо-сигналов движущейся цели и имеет полосу пропускания от F1 до F 2. Измеритель длительности импульсов 8 должен обеспечивать измерение длительности видеоимпульсов в интервале от нескольких десятков мкс до нескольких мс. Принципы построения секвентного допплеровского фильтра на широкополосном усилителе видеоимпульсов 9 с обратной связью в виде управляемой линии задержки 12 и входным 10 и выходным 11 устройствами связи известны и описаны в литературе [1]. Управляемая линия задержки 12 выполнена из отрезка коаксиального кабеля. При высокой частоте F следования зондирующи х видеоимпульсов длина этой линии будет сравнительно небольшой и приемлемой для реализации, а устройство 13 изменяет длину этой линии в очень малых пределах ± 2VrмаксVл/cF. Измеритель времени запаздывания tз наносекундных видеоимпульсов должен обеспечивать измерение времени в интервале нескольких нс. Вычислитель 15 представляет собой микроЭВМ для решения уравнения (7) и вычислений по формулам (4), (8). Динамика работы предложенного устройства осуществляется следующим образом. Передатчик 3 формируют, а антенна 1 излучает зондирующий сигнал в виде периодических наносекундных видеоимпульсов с частотой следования F. Зондирующие импульсы поля радиоволн отражаются от земли и цели, принимаются антенной 1 и усиливаются приемником 4. При этом одному зондирующему импульсу будет соответствовать три видеоимпульса эхо-сигнала прямой волны и волн, однократно и двукратно отраженных от земли. Пассивная помеха от земли на выходе приемника 4 представляет протяженное несинусоидальное периодическое напряжение с периодом T = 1/F, а суммарное напряжение помехи и сигнала на выходе приемника 4 имеет отрицательную полярность. Помеха не имеет допплеровского сдвига, а эхосигналы движущейся цели имеют допплеровский сдвиг. Сигналы с выхода приемника 4 разделяются по двум каналам: в канал измерения радиальной скорости и в канал измерения угла места цели. В канале измерения радиальной скорости из выходного напряжения приемника 4 вычитают зондирующий сигнал со второго вы хода низкого уровня передатчика 3 и смешивают сигналы передатчика и приемника на смесителе 6. Спектр допплеровских частот сигнала с вы хода смесителя 6 выделяют фильтром нижних частот 7, а помеху подавляют этим же фильтром. В результате сигнал на выходе фильтра 7 будет представлять видеоимпульсы микросекундной длительности t. Эту длительность импульсы измеряют измерителем 8 и по результату измерения определяют радиальную скорости цели Vr путем решения уравнения (7) с помощью вычислителя 15. По найденному значению Vr с помощью того же вычислителя вычисляют длину L линии задержки 12 по формуле (8) и с помощью устройства 13 устанавливают найденную длину этой линии. В канале измерения угла места цели эхо-сигналы цели усиливают и накапливают усилителем 9 с обратной связью в виде управляемой линии задержки 12. Этот усилитель является секвентным допплеровским фильтром, который подавляет пассивную помеху от земли, так как период этой помехи немного отличается от периода эхо-сигналов от движущейся цели и времени задержки линии 12. На выходе секвентного допплеровского фильтра измеряют время запаздывания tз видеоимпульсов эхосигнала прямой и дважды отраженной от земли радиоволн относительно друг друга . Угол места цели определяют по результату измерения времени запаздывания tз с помощью вычислителя 15 по формуле (4). Таким образом, предложенное устройство устраняет отмеченные недостатки прототипа и аналога, эффективно подавляет пассивную помеху о т земли и обеспечивает измерение угла места и радиальной скорости цели.
ДивитисяДодаткова інформація
Назва патенту англійськоюSequential measuring device for angle of elevation and velocity of target with unit for protaction against passive noise
Автори англійськоюZhukov Serhii Anatoliiovych
Назва патенту російськоюСеквентный измеритель места и скорости цели с устройством защиты от пассивных помех
Автори російськоюЖуков Сергей Анатольевич
МПК / Мітки
МПК: G01S 17/06
Мітки: пасивних, кута, швидкості, секвентний, цілі, вимірювач, захисту, перешкод, пристроєм, місця
Код посилання
<a href="https://ua.patents.su/7-17459-sekventnijj-vimiryuvach-kuta-miscya-i-shvidkosti-cili-z-pristroehm-zakhistu-vid-pasivnikh-pereshkod.html" target="_blank" rel="follow" title="База патентів України">Секвентний вимірювач кута місця і швидкості цілі з пристроєм захисту від пасивних перешкод</a>
Бортовий радіолокатор підповерхневого зондування з пристроєм захисту від пасивних перешкод
Номер патенту: 17472
Опубліковано: 06.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: пристроєм, перешкод, радіолокатор, підповерхневого, пасивних, зондування, бортовий, захисту
Формула / Реферат:
Бортовой радиолокатор подповерхностного зондирования с устройством защиты от пассивных помех, содержащий бортовую приемо-передающую антенну, ось которой направлена вертикально вниз, антенный переключатель, передатчик периодических видеоимпульсов наносекундной длительности без несущей частоты, приемник и индикатор, отличающийся тем, что на выходе приемника установлен широкополосный усилитель видеоимпульсов с входным и выходным устройствами...
Радіолокаційний вимірювач кута місця цілі
Номер патенту: 13421
Опубліковано: 16.12.1996
Автори: Бахвалов Борис Миколайович, Родін Олександр Валерійович, Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: радіолокаційний, вимірювач, місця, кута, цілі
Формула / Реферат:
Радиолокационный измеритель угла места цели, содержащий передатчик, приемник, индикатор и приемо-передающую антенну с антенным переключателем, согласно изобретению передатчик выполнен для несинусоидальных импульсных сигналов наносекундной длительности без несущей частоты, антенна выполнена в виде вибраторной решетки с плоским металлическим рефлектором, в которой расстояние между вибраторами по высоте равно высоте h подъема нижнего...
Спосіб захисту наземної рлс від пасивних перешкод

Номер патенту: 13919
Опубліковано: 25.04.1997
Автори: Осипа Володимир Олександрович, Бахвалов Борис Миколайович, Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: спосіб, захисту, наземної, рлс, пасивних, перешкод
Формула / Реферат:
Способ защиты наземной РЛС от пассивных помех, заключающийся в излучении зондирующих сигналов, приеме эхо-сигналов, задержке эхо-сигнала и вычитании задержанного сигнала из принимаемого в данный момент сигнала, отличающийся тем, что излучают несинусоидальный импульсный сигнал в виде периодической последовательности видеоимпульсов одинаковой полярности длительностью менее 1 нс без несущей частоты, а время задержки эхо-сигнала выбирают...
Спосіб вимирювання кута місця цілі для наземного секвентного радіолокатора
Номер патенту: 13417
Опубліковано: 16.12.1996
Автори: Бахвалов Борис Миколайович, Жуков Сергій Анатолійович, Родін Олександр Валерійович
МПК: G01S 17/06
Мітки: кута, цілі, секвентного, наземного, спосіб, вимірювання, радіолокатора, місця
Формула / Реферат:
Способ измерения угла места цели для наземного секвентного радиолокатора, заключающийся в излучении зондирующего сигнала в виде видеоимпульса поля радиоволн наносекундной длительности без несущей частоты и приеме эхо-сигналов воздушной цели, отличающийся тем, что вместе с целью облучают земную поверхность, измеряют время запаздывания t3 друг относительно друга отрицательных видеоимпульсов эхо-сигнала цели и длительность t отрицательного...
Вимірювач азимуту і кута місця для трикоординатної рлс
Номер патенту: 13418
Опубліковано: 16.12.1996
Автори: Родін Олександр Валерійович, Жуков Сергій Анатолійович, Бахвалов Борис Миколайович
МПК: G01S 17/06
Мітки: рлс, азимуту, кута, трикоординатної, місця, вимірювач
Формула / Реферат:
Измеритель азимута и угла места для трехкоординатной РЛС, содержащий передатчик с передающей антенной, приемник и индикатор, отличающийся тем, что передатчик выполнен для несинусоидальных импульсных сигналов наносекундной длительности без несущей частоты, приемная антенна выполнена в виде вибраторной антенной решетки с уголковым рефлектором из двух взаимно перпендикулярных проводящих плоскостей, в которой удаление ближнего вибратора от...
Попередній патент: Бортовий секвентний радіолокатор для виявлення рухомих цілей на поверхні землі
Наступний патент: Секвентний вимірювач азимуту рухомої цілі з пристроєм захисту від пасивних перешкод
Випадковий патент: Спосіб приготування вина плодово-ягідного десертного "медова журавлина"