Секвентний радіолокатор для виявлення маловисотної цілі
Формула / Реферат
Секвентный радиолокатор для обнаружения маловысотной цели, содержащий передатчик видеоимпульсов поля радиоволн наносекундной длительности без несущей частоты, приемо-передающую антенну с антенным переключателем, приемник и индикатор, отличающийся тем, что в состав радиолокатора дополнительно включен наземный пеленгатор бортового источника радиоизлучения цели по углу места q со своей антенной системой, на выходе приемника радиолокатора параллельно включены два широкополосных диода противоположной полярности, выход первого диода связан с управляемой линией задержки отрицательных видеоимпульсов эхо-сигнала цели с устройством изменения длины этой линии по соотношению
где l - длина управляемой линии задержки;
V - скорость распространения радиоволн в линии задержки;
h - высота подъема антенны радиолокатора над землей;
c - скорость света;
q - угол места цели,
выход пеленгатора связан с устройством изменения длины линии задержки, выход второго диода и выход линии задержки связаны с устройством вычитания отрицательных видеоимпульсов эхо-сигнала из положительных импульсов этого сигнала, а выход устройства вычитания связан с индикатором.
Текст
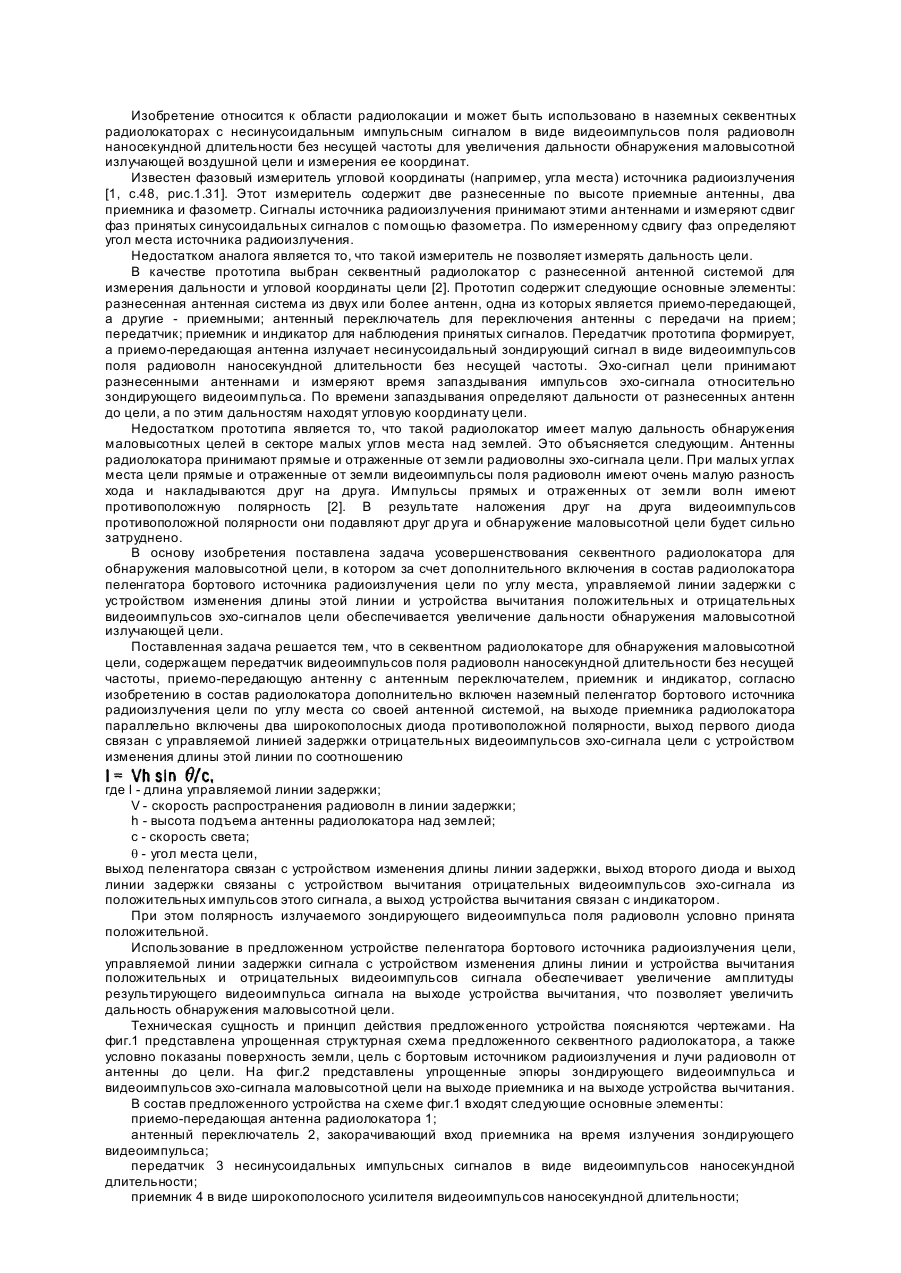
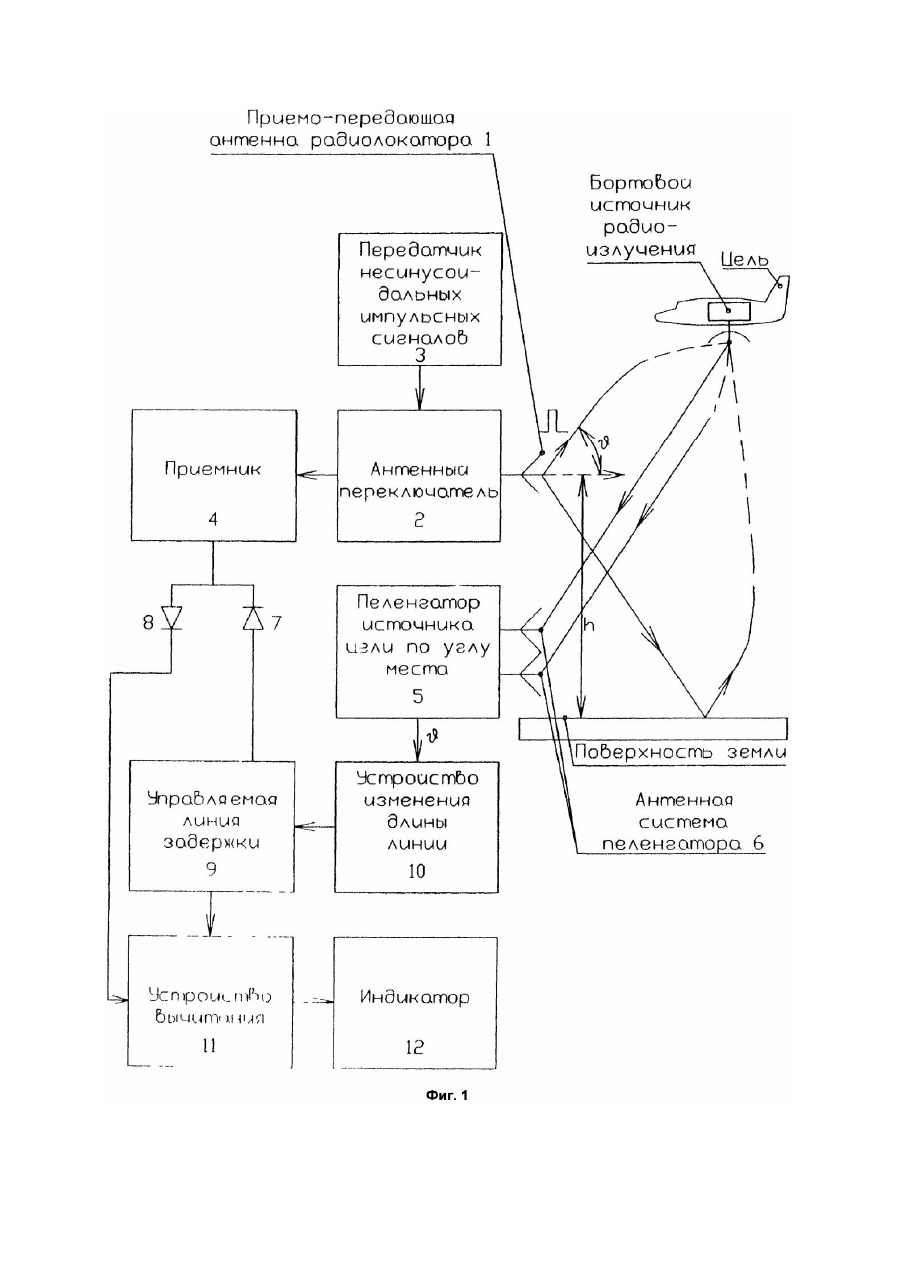
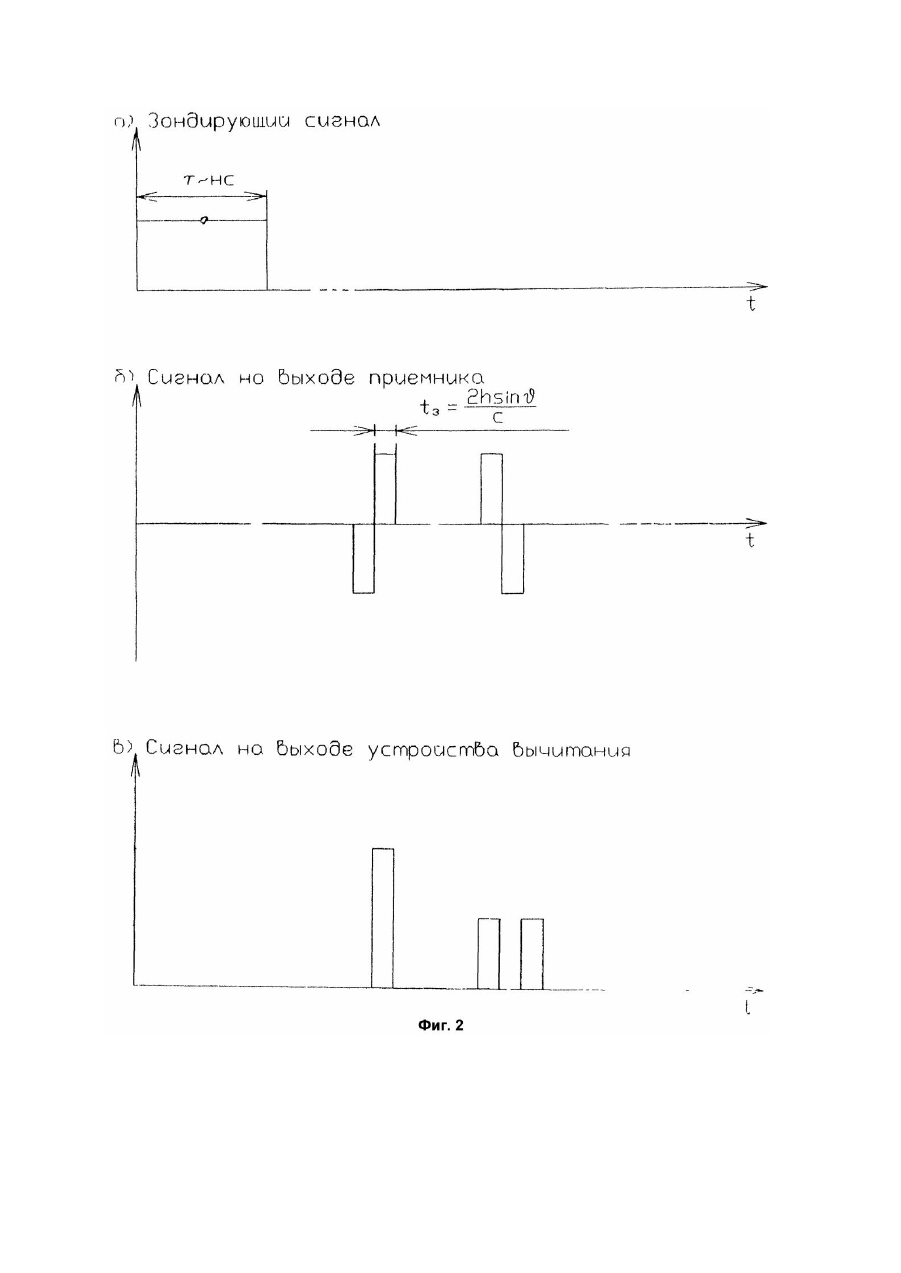
Изобретение относится к области радиолокации и может быть использовано в наземных секвентных радиолокаторах с несинусоидальным импульсным сигналом в виде видеоимпульсов поля радиоволн наносекундной длительности без несущей частоты для увеличения дальности обнаружения маловысотной излучающей воздушной цели и измерения ее координат. Известен фазовый измеритель угловой координаты (например, угла места) источника радиоизлучения [1, с.48, рис.1.31]. Этот измеритель содержит две разнесенные по высоте приемные антенны, два приемника и фазометр. Сигналы источника радиоизлучения принимают этими антеннами и измеряют сдвиг фаз принятых синусоидальных сигналов с помощью фазометра. По измеренному сдвигу фаз определяют угол места источника радиоизлучения. Недостатком аналога является то, что такой измеритель не позволяет измерять дальность цели. В качестве прототипа выбран секвентный радиолокатор с разнесенной антенной системой для измерения дальности и угловой координаты цели [2]. Прототип содержит следующие основные элементы: разнесенная антенная система из двух или более антенн, одна из которых является приемо-передающей, а другие - приемными; антенный переключатель для переключения антенны с передачи на прием; передатчик; приемник и индикатор для наблюдения принятых сигналов. Передатчик прототипа формирует, а приемо-передающая антенна излучает несинусоидальный зондирующий сигнал в виде видеоимпульсов поля радиоволн наносекундной длительности без несущей частоты. Эхо-сигнал цели принимают разнесенными антеннами и измеряют время запаздывания импульсов эхо-сигнала относительно зондирующего видеоимпульса. По времени запаздывания определяют дальности от разнесенных антенн до цели, а по этим дальностям находят угловую координату цели. Недостатком прототипа является то, что такой радиолокатор имеет малую дальность обнаружения маловысотных целей в секторе малых углов места над землей. Это объясняется следующим. Антенны радиолокатора принимают прямые и отраженные от земли радиоволны эхо-сигнала цели. При малых углах места цели прямые и отраженные от земли видеоимпульсы поля радиоволн имеют очень малую разность хода и накладываются друг на друга. Импульсы прямых и отраженных от земли волн имеют противоположную полярность [2]. В результате наложения друг на друга видеоимпульсов противоположной полярности они подавляют друг др уга и обнаружение маловысотной цели будет сильно затруднено. В основу изобретения поставлена задача усовершенствования секвентного радиолокатора для обнаружения маловысотной цели, в котором за счет дополнительного включения в состав радиолокатора пеленгатора бортового источника радиоизлучения цели по углу места, управляемой линии задержки с устройством изменения длины этой линии и устройства вычитания положительных и отрицательных видеоимпульсов эхо-сигналов цели обеспечивается увеличение дальности обнаружения маловысотной излучающей цели. Поставленная задача решается тем, что в секвентном радиолокаторе для обнаружения маловысотной цели, содержащем передатчик видеоимпульсов поля радиоволн наносекундной длительности без несущей частоты, приемо-передающую антенну с антенным переключателем, приемник и индикатор, согласно изобретению в состав радиолокатора дополнительно включен наземный пеленгатор бортового источника радиоизлучения цели по углу места со своей антенной системой, на выходе приемника радиолокатора параллельно включены два широкополосных диода противоположной полярности, выход первого диода связан с управляемой линией задержки отрицательных видеоимпульсов эхо-сигнала цели с устройством изменения длины этой линии по соотношению где l - длина управляемой линии задержки; V - скорость распространения радиоволн в линии задержки; h - высота подъема антенны радиолокатора над землей; c - скорость света; q - угол места цели, выход пеленгатора связан с устройством изменения длины линии задержки, выход второго диода и выход линии задержки связаны с устройством вычитания отрицательных видеоимпульсов эхо-сигнала из положительных импульсов этого сигнала, а выход устройства вычитания связан с индикатором. При этом полярность излучаемого зондирующего видеоимпульса поля радиоволн условно принята положительной. Использование в предложенном устройстве пеленгатора бортового источника радиоизлучения цели, управляемой линии задержки сигнала с устройством изменения длины линии и устройства вычитания положительных и отрицательных видеоимпульсов сигнала обеспечивает увеличение амплитуды результирующего видеоимпульса сигнала на выходе устройства вычитания, что позволяет увеличить дальность обнаружения маловысотной цели. Техническая сущность и принцип действия предложенного устройства поясняются чертежами. На фиг.1 представлена упрощенная структурная схема предложенного секвентного радиолокатора, а также условно показаны поверхность земли, цель с бортовым источником радиоизлучения и лучи радиоволн от антенны до цели. На фиг.2 представлены упрощенные эпюры зондирующего видеоимпульса и видеоимпульсов эхо-сигнала маловысотной цели на выходе приемника и на выходе устройства вычитания. В состав предложенного устройства на схеме фиг.1 входят следующие основные элементы: приемо-передающая антенна радиолокатора 1; антенный переключатель 2, закорачивающий вход приемника на время излучения зондирующего видеоимпульса; передатчик 3 несинусоидальных импульсных сигналов в виде видеоимпульсов наносекундной длительности; приемник 4 в виде широкополосного усилителя видеоимпульсов наносекундной длительности; пеленгатор 5 бортового источника радиоизлучения цели по углу места q; антенная система пеленгатора 6; два широкополосных диода 7, 8 для разделения отрицательных и положительных видеоимпульсов с выхода приемника 4; управляемая линия задержки 9 отрицательных видеоимпульсов эхо-сигнала; устройство 10 изменения длины l линии задержки в зависимости от угла места цели по соотношению (1); устройство вычитания 11 задержанных отрицательных видеоимпульсов из положительных импульсов эхо-сигнала; индикатор 12 для визуального наблюдения эхо-сигнала маловысотной цели. Ниже поясняется принцип действия предложенного устройства и обосновываются его существенные отличительные признаки. В предложенном устройстве использовано свойство несинусоидальных импульсных сигналов изменять полярность видеоимпульса поля радиоволн при отражении от земли или цели [2]. Радиоволны от антенны 1 секвентного радиолокатора до маловысотной цели и обратно распространяются по следующим четырем путям: 1) антенна - цель - антенна; 2) антенна - цель - земля - антенна; 3) антенна - земля - цель - антенна; 4) антенна - земля - цель - земля - антенна. Самым коротким является первый путь. На путях 2) и 3) импульс эхо-сигнала запаздывает относительно импульса пути 1) на время tз, равное где c - скорость света; h - высота подъема антенны радиолокатора над землей; q - угол места цели. Самым длинным является четвертый путь, на котором видеоимпульс запаздывает на время 2tз относительно импульса прямой волны. Видеоимпульсы путей 2) и 3} складываются и образуют один видеоимпульс положительной полярности. Видеоимпульсы путей 1) и 4) имеют отрицательную полярность. В результате одному зондирующему видеоимпульсу соответствует три видеоимпульса эхосигнала цели, два из которых будут отрицательные, а один положительный. Когда цель находится под малым углом места q время запаздывания tз этих импульсов друг относительно друга очень мало, импульсы разной полярности накладываются и подавляют друг др уга. При небольшом отличии угла q от нуля такое наложение будет неполным и от импульса останутся остатки разной полярности, как показано на фиг.2б. Предлагается использовать эти остатки для обнаружения маловысотной цели. Для увеличения амплитуды остатков импульсов предложено разделить положительные и отрицательные видеоимпульсы на выходе приемника 4 с помощью широкополосных диодов 7, 8 и задержать отрицательные импульсы на время tз, определенное соотношением (2). После этого отрицательные импульсы вычитают из положительных. В результате на выходе устройства вычитания 11 амплитуда импульса возрастет вдвое (как показано на фиг.2в) и этот удвоенный импульс может быть обнаружен на фоне собственных шумов приемника. Необходимая для задержки на время tз длина l линии задержки 9 зависит от угла места цели q и определена соотношением (1), которое получено из (2). Такая длина линии задержки 9 устанавливается устройством 10 изменения длины линии. Требуемое для этого значение угла места цели q определяют с помощью пеленгатора 5 по излучению бортового источника радиоизлучения цели. Такие источники имеются на борту самолета и работают в процессе полета. Предложенное техническое решение позволяет собрать остатки видеоимпульсов эхо-сигнала маловысотной цели и вдвое увеличить амплитуду импульса, что способствует увеличению дальности обнаружения маловысотной излучающей цели. Дальность действия пеленгатора обычновсегда превышает дальность действия радиолокатора. Таким образом, предложенное устройство может быть практически реализовано, а отмеченные выше отличительные признаки являются существенными и принципиально необходимы для реализации этого устройства. Основные элементы предложенного устройства на схеме фиг.1 выполнены следующим образом. Приемо-передающая антенна 1, антенный переключатель 2, передатчик 3, приемник 4 и индикатор 12 аналогичны соответствующим элементам прототипа. Пеленгатор 5 с антенной системой 6 работает в диапазоне бортовых радиосредств самолета и аналогичен описанному выше аналогу. Диоды 7, 8 и устройство вычитания 11 должны иметь широкую полосу пропускания. Линия задержки 9 может быть выполнена в виде отрезка коаксиального или двухпроводного кабеля изменяемой длины. Длину линии задержки изменяет электромеханическое устройство 10, на вход которого подают значение угла места цели q, измеренное пеленгатором 5. Требуемый диапазон изменения длины линии 9 сравнительно мал, что вполне приемлемо для реализации. Динамика работы предложенного устройства осуществляется следующим образом. Антенная система 6 пеленгатора 5 принимает сигналы бортового источника радиоизлучения маловысотной цели, а пеленгатор измеряет угол места этой цели. Значение этого угла поступает на устройство 10 изменения длины линии задержки 9. Это устройство устанавливает длину линии задержки 9 в соответствии с соотношением (1). Передатчик 3 формирует, а антенна 1 излучает зондирующий сигнал в виде видеоимпульсов наносекундной длительности. Антенна 1 и приемник 4 принимают импульсы прямых и отраженных от земли эхо-сигналов маловысотной цели. Эти импульсы имеют разную полярность, накладываются и частично подавляют друг друга. Положительные и отрицательные остатки импульсов эхо-сигнала разделяют широкополосными диодами 7, 8. Отрицательные импульсы задерживают на время tз линией задержки 9 и вычитают из положительных импульсов с помощью устройства вычитания 11. В результате амплитуда импульса удваивается и его наблюдают на индикаторе 12 на фоне собственных шумов приемника. Таким образом, предложенное устройство обеспечивает решение поставленной задачи, устраняет отмеченные недостатки аналога и прототипа и позволяет увеличить дальность обнаружения маловысотной излучающей цели.
ДивитисяДодаткова інформація
Назва патенту англійськоюSequential radar for reveal of low target
Автори англійськоюZhukov Serhii Anatoliiovych
Назва патенту російськоюСеквентный радиолокатор для выявления маловысотной цели
Автори російськоюЖуков Сергей Анатольевич
МПК / Мітки
МПК: G01S 17/06
Мітки: секвентний, виявлення, радіолокатор, цілі, маловисотної
Код посилання
<a href="https://ua.patents.su/5-17461-sekventnijj-radiolokator-dlya-viyavlennya-malovisotno-cili.html" target="_blank" rel="follow" title="База патентів України">Секвентний радіолокатор для виявлення маловисотної цілі</a>
Бортовий секвентний радіолокатор виявлення об’єктів поблизу земної поверхні
Номер патенту: 17471
Опубліковано: 06.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: радіолокатор, бортовий, поблизу, земної, об'єктів, виявлення, поверхні, секвентний
Формула / Реферат:
Бортовой секвентный радиолокатор обнаружения объектов вблизи земной поверхности, содержащий приемо-передающую антенну с антенным переключателем, приемник и передатчик несинусоидальных сигналов в виде периодических прямоугольных видеоимпульсов наносекундной длительности с высокой частотой следования импульсов отличающийся тем, что на выходе приемника установлен полосовой фильтр с полосой пропускания от нижней частоты равной до верхней...
Спосіб вимірювання кута місця маловисотної цілі
Номер патенту: 13422
Опубліковано: 16.12.1996
Автори: Жуков Сергій Анатолійович, Бахвалов Борис Миколайович, Родін Олександр Валерійович
МПК: G01S 17/06
Мітки: цілі, вимірювання, спосіб, маловисотної, місця, кута
Формула / Реферат:
Способ измерения угла места маловысотной цели, заключающийся в излучении периодических зондирующих сигналов с помощью параболической зеркальной антенны с облучателем в виде вибратора с контррефлектором, приеме и индикации эхо-сигналов цели, отличающийся тем, что ось параболического зеркала антенны направляют горизонтально в сторону цели, излучают несинусоидальные импульсные сигналы наносекундной длительности без несущей частоты,...
Спосіб вимирювання кута місця цілі для наземного секвентного радіолокатора
Номер патенту: 13417
Опубліковано: 16.12.1996
Автори: Родін Олександр Валерійович, Жуков Сергій Анатолійович, Бахвалов Борис Миколайович
МПК: G01S 17/06
Мітки: секвентного, кута, місця, спосіб, цілі, наземного, радіолокатора, вимірювання
Формула / Реферат:
Способ измерения угла места цели для наземного секвентного радиолокатора, заключающийся в излучении зондирующего сигнала в виде видеоимпульса поля радиоволн наносекундной длительности без несущей частоты и приеме эхо-сигналов воздушной цели, отличающийся тем, что вместе с целью облучают земную поверхность, измеряют время запаздывания t3 друг относительно друга отрицательных видеоимпульсов эхо-сигнала цели и длительность t отрицательного...
Бортовий радіолокатор підповерхневого зондування з пристроєм захисту від пасивних перешкод
Номер патенту: 17472
Опубліковано: 06.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: підповерхневого, пристроєм, зондування, пасивних, захисту, перешкод, радіолокатор, бортовий
Формула / Реферат:
Бортовой радиолокатор подповерхностного зондирования с устройством защиты от пассивных помех, содержащий бортовую приемо-передающую антенну, ось которой направлена вертикально вниз, антенный переключатель, передатчик периодических видеоимпульсов наносекундной длительности без несущей частоты, приемник и индикатор, отличающийся тем, что на выходе приемника установлен широкополосный усилитель видеоимпульсов с входным и выходным устройствами...
Радіолокаційний вимірювач кута місця цілі
Номер патенту: 13421
Опубліковано: 16.12.1996
Автори: Жуков Сергій Анатолійович, Бахвалов Борис Миколайович, Родін Олександр Валерійович
МПК: G01S 17/06
Мітки: місця, кута, радіолокаційний, вимірювач, цілі
Формула / Реферат:
Радиолокационный измеритель угла места цели, содержащий передатчик, приемник, индикатор и приемо-передающую антенну с антенным переключателем, согласно изобретению передатчик выполнен для несинусоидальных импульсных сигналов наносекундной длительности без несущей частоты, антенна выполнена в виде вибраторной решетки с плоским металлическим рефлектором, в которой расстояние между вибраторами по высоте равно высоте h подъема нижнего...
Попередній патент: Двигун внутрішнього згоряння з пристроєм, що покращує перетворення теплової енергії у механічну (варіанти)
Наступний патент: Бортовий секвентний радіолокатор для виявлення рухомих цілей на поверхні землі
Випадковий патент: Спосіб очищення зернового матеріалу