Пристрій для спускання та підіймання плаваючого об’єкта
Номер патенту: 19255
Опубліковано: 25.12.1997
Формула / Реферат
Устройство для спуска и подъема плавающего объекта, содержащее металлоконструкцию для выноса плавающего объекта с приводом ее перемещения, две грузовые подвески со шкивами, две трехстропные проводки, связанные с грузовой лебедкой, и установленный на упомянутой металлоконструкции компенсатор, выполненный со шкивами, а также с корпусом, в трубчатых направляющих которого подвижно установлены штоки, связанные с блоками пружин, при этом каждый из строп упомянутых трехстропных проводок запасован в соответствующие шкивы, установленные на упомянутой металлоконструкции, отводной шкив грузовой подвески и соответствующий шкив компенсатора, отличающееся тем, что упомянутый компенсатор выполнен с дополнительными трубчатыми направляющими с подвижно расположенными в них штоками и блоками пружин, при этом каждый из штоков связан с соответствующим шкивом этого компенсатора, а каждый из упомянутых блоков пружин выполнен из пружин с различной жесткостью.
Текст
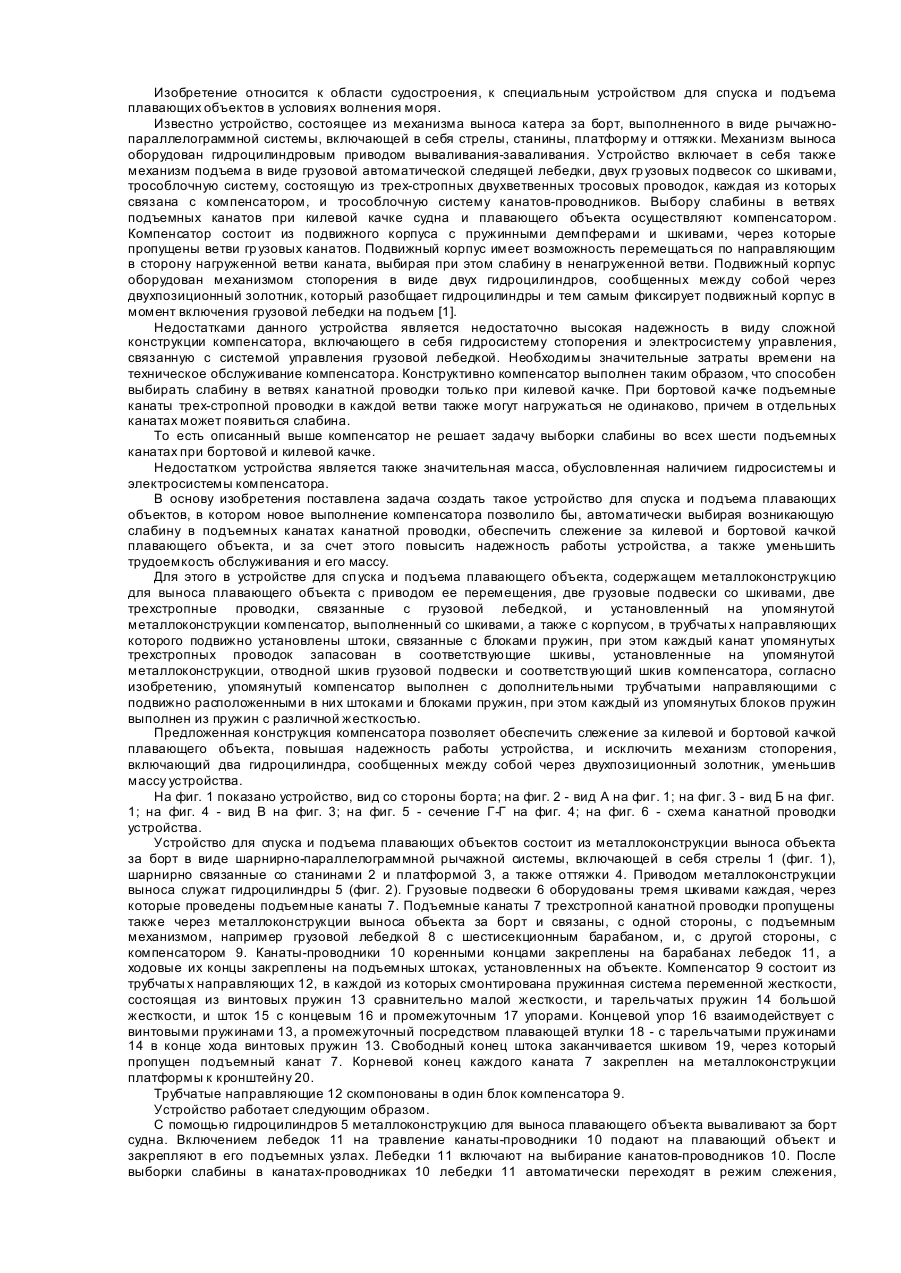
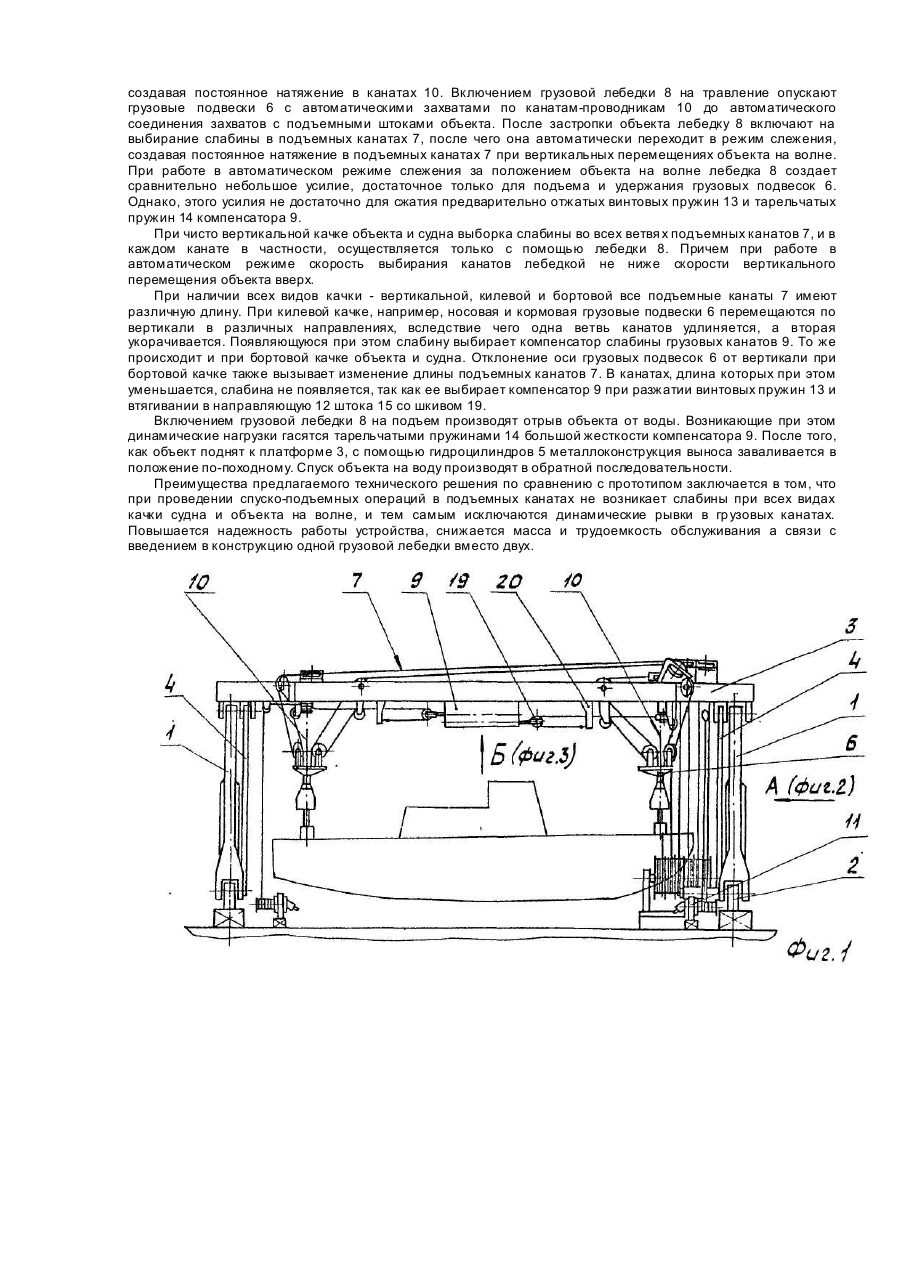
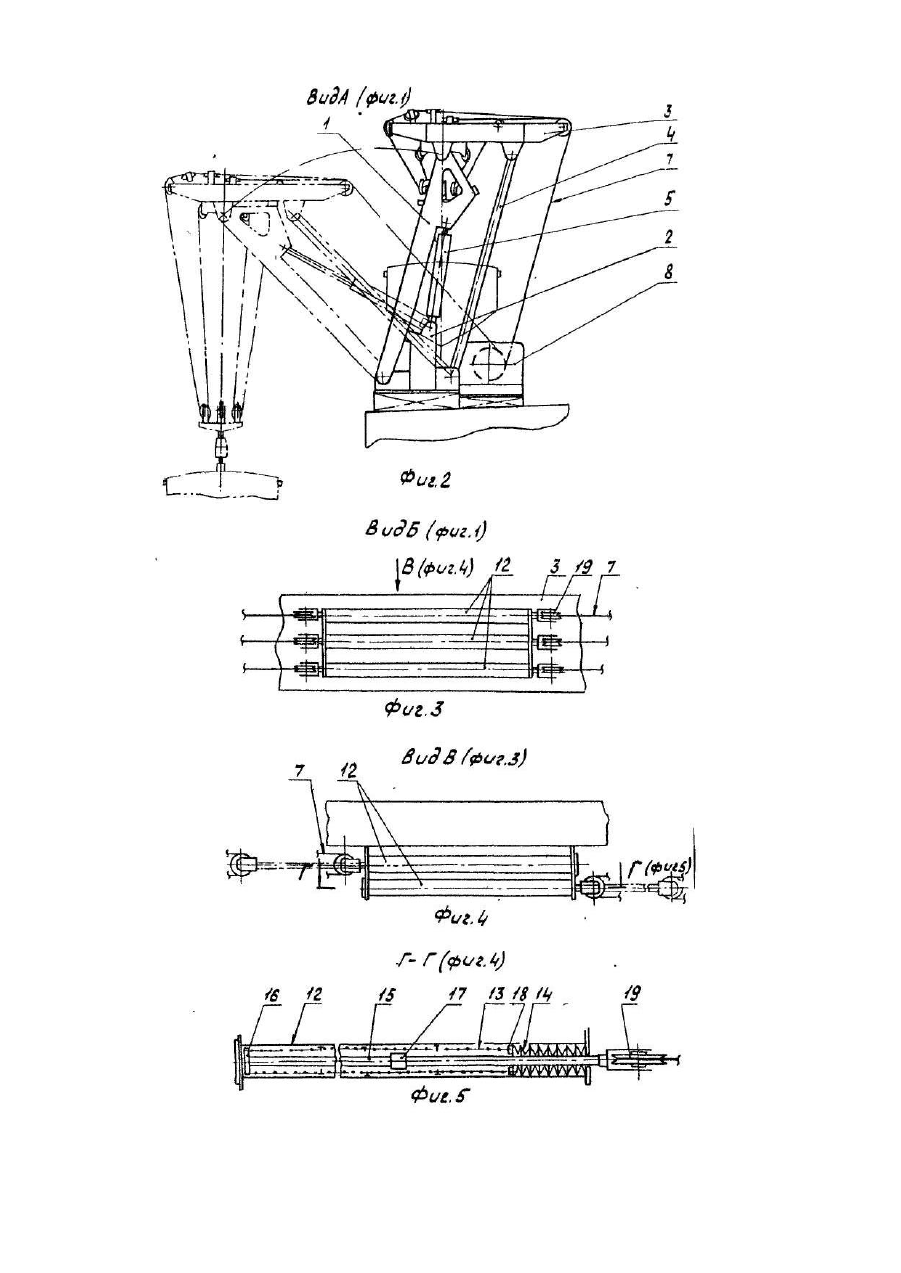
Изобретение относится к области судостроения, к специальным устройством для спуска и подъема плавающих объектов в условиях волнения моря. Известно устройство, состоящее из механизма выноса катера за борт, выполненного в виде рычажнопараллелограммной системы, включающей в себя стрелы, станины, платформу и оттяжки. Механизм выноса оборудован гидроцилиндровым приводом вываливания-заваливания. Устройство включает в себя также механизм подъема в виде грузовой автоматической следящей лебедки, двух гр узовых подвесок со шкивами, трособлочную систему, состоящую из трех-стропных двухветвенных тросовых проводок, каждая из которых связана с компенсатором, и трособлочную систему канатов-проводников. Выбору слабины в ветвях подъемных канатов при килевой качке судна и плавающего объекта осуществляют компенсатором. Компенсатор состоит из подвижного корпуса с пружинными демпферами и шкивами, через которые пропущены ветви гр узовых канатов. Подвижный корпус имеет возможность перемещаться по направляющим в сторону нагруженной ветви каната, выбирая при этом слабину в ненагруженной ветви. Подвижный корпус оборудован механизмом стопорения в виде двух гидроцилиндров, сообщенных между собой через двухпозиционный золотник, который разобщает гидроцилиндры и тем самым фиксирует подвижный корпус в момент включения грузовой лебедки на подъем [1]. Недостатками данного устройства является недостаточно высокая надежность в виду сложной конструкции компенсатора, включающего в себя гидросистему стопорения и электросистему управления, связанную с системой управления грузовой лебедкой. Необходимы значительные затраты времени на техническое обслуживание компенсатора. Конструктивно компенсатор выполнен таким образом, что способен выбирать слабину в ветвях канатной проводки только при килевой качке. При бортовой качке подъемные канаты трех-стропной проводки в каждой ветви также могут нагружаться не одинаково, причем в отдельных канатах может появиться слабина. То есть описанный выше компенсатор не решает задачу выборки слабины во всех шести подъемных канатах при бортовой и килевой качке. Недостатком устройства является также значительная масса, обусловленная наличием гидросистемы и электросистемы компенсатора. В основу изобретения поставлена задача создать такое устройство для спуска и подъема плавающих объектов, в котором новое выполнение компенсатора позволило бы, автоматически выбирая возникающую слабину в подъемных канатах канатной проводки, обеспечить слежение за килевой и бортовой качкой плавающего объекта, и за счет этого повысить надежность работы устройства, а также уменьшить трудоемкость обслуживания и его массу. Для этого в устройстве для сп уска и подъема плавающего объекта, содержащем металлоконструкцию для выноса плавающего объекта с приводом ее перемещения, две грузовые подвески со шкивами, две трехстропные проводки, связанные с грузовой лебедкой, и установленный на упомянутой металлоконструкции компенсатор, выполненный со шкивами, а также с корпусом, в трубчаты х направляющих которого подвижно установлены штоки, связанные с блоками пружин, при этом каждый канат упомянутых трехстропных проводок запасован в соответствующие шкивы, установленные на упомянутой металлоконструкции, отводной шкив грузовой подвески и соответствующий шкив компенсатора, согласно изобретению, упомянутый компенсатор выполнен с дополнительными трубчатыми направляющими с подвижно расположенными в них штоками и блоками пружин, при этом каждый из упомянутых блоков пружин выполнен из пружин с различной жесткостью. Предложенная конструкция компенсатора позволяет обеспечить слежение за килевой и бортовой качкой плавающего объекта, повышая надежность работы устройства, и исключить механизм стопорения, включающий два гидроцилиндра, сообщенных между собой через двухпозиционный золотник, уменьшив массу устройства. На фиг. 1 показано устройство, вид со стороны борта; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - вид Б на фиг. 1; на фиг. 4 - вид В на фиг. 3; на фиг. 5 - сечение Г-Г на фиг. 4; на фиг. 6 - схема канатной проводки устройства. Устройство для спуска и подъема плавающих объектов состоит из металлоконструкции выноса объекта за борт в виде шарнирно-параллелограммной рычажной системы, включающей в себя стрелы 1 (фиг. 1), шарнирно связанные со станинами 2 и платформой 3, а также оттяжки 4. Приводом металлоконструкции выноса служат гидроцилиндры 5 (фиг. 2). Грузовые подвески 6 оборудованы тремя шкивами каждая, через которые проведены подъемные канаты 7. Подъемные канаты 7 трехстропной канатной проводки пропущены также через металлоконструкции выноса объекта за борт и связаны, с одной стороны, с подъемным механизмом, например грузовой лебедкой 8 с шестисекционным барабаном, и, с другой стороны, с компенсатором 9. Канаты-проводники 10 коренными концами закреплены на барабанах лебедок 11, а ходовые их концы закреплены на подъемных штоках, установленных на объекте. Компенсатор 9 состоит из трубчаты х направляющих 12, в каждой из которых смонтирована пружинная система переменной жесткости, состоящая из винтовых пружин 13 сравнительно малой жесткости, и тарельчатых пружин 14 большой жесткости, и шток 15 с концевым 16 и промежуточным 17 упорами. Концевой упор 16 взаимодействует с винтовыми пружинами 13, а промежуточный посредством плавающей втулки 18 - с тарельчатыми пружинами 14 в конце хода винтовых пружин 13. Свободный конец штока заканчивается шкивом 19, через который пропущен подъемный канат 7. Корневой конец каждого каната 7 закреплен на металлоконструкции платформы к кронштейну 20. Трубчатые направляющие 12 скомпонованы в один блок компенсатора 9. Устройство работает следующим образом. С помощью гидроцилиндров 5 металлоконструкцию для выноса плавающего объекта вываливают за борт судна. Включением лебедок 11 на травление канаты-проводники 10 подают на плавающий объект и закрепляют в его подъемных узлах. Лебедки 11 включают на выбирание канатов-проводников 10. После выборки слабины в канатах-проводниках 10 лебедки 11 автоматически переходят в режим слежения, создавая постоянное натяжение в канатах 10. Включением грузовой лебедки 8 на травление опускают грузовые подвески 6 с автоматическими захватами по канатам-проводникам 10 до автоматического соединения захватов с подъемными штоками объекта. После застропки объекта лебедку 8 включают на выбирание слабины в подъемных канатах 7, после чего она автоматически переходит в режим слежения, создавая постоянное натяжение в подъемных канатах 7 при вертикальных перемещениях объекта на волне. При работе в автоматическом режиме слежения за положением объекта на волне лебедка 8 создает сравнительно небольшое усилие, достаточное только для подъема и удержания грузовых подвесок 6. Однако, этого усилия не достаточно для сжатия предварительно отжатых винтовых пружин 13 и тарельчатых пружин 14 компенсатора 9. При чисто вертикальной качке объекта и судна выборка слабины во всех ветвя х подъемных канатов 7, и в каждом канате в частности, осуществляется только с помощью лебедки 8. Причем при работе в автоматическом режиме скорость выбирания канатов лебедкой не ниже скорости вертикального перемещения объекта вверх. При наличии всех видов качки - вертикальной, килевой и бортовой все подъемные канаты 7 имеют различную длину. При килевой качке, например, носовая и кормовая грузовые подвески 6 перемещаются по вертикали в различных направлениях, вследствие чего одна ветвь канатов удлиняется, а вторая укорачивается. Появляющуюся при этом слабину выбирает компенсатор слабины грузовых канатов 9. То же происходит и при бортовой качке объекта и судна. Отклонение оси грузовых подвесок 6 от вертикали при бортовой качке также вызывает изменение длины подъемных канатов 7. В канатах, длина которых при этом уменьшается, слабина не появляется, так как ее выбирает компенсатор 9 при разжатии винтовых пружин 13 и втягивании в направляющую 12 штока 15 со шкивом 19. Включением грузовой лебедки 8 на подъем производят отрыв объекта от воды. Возникающие при этом динамические нагрузки гасятся тарельчатыми пружинами 14 большой жесткости компенсатора 9. После того, как объект поднят к платформе 3, с помощью гидроцилиндров 5 металлоконструкция выноса заваливается в положение по-походному. Спуск объекта на воду производят в обратной последовательности. Преимущества предлагаемого технического решения по сравнению с прототипом заключается в том, что при проведении спуско-подъемных операций в подъемных канатах не возникает слабины при всех видах качки судна и объекта на волне, и тем самым исключаются динамические рывки в гр узовых канатах. Повышается надежность работы устройства, снижается масса и трудоемкость обслуживания а связи с введением в конструкцию одной грузовой лебедки вместо двух.
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for lowering and lifting of floating object
Автори англійськоюToropov Borys Mykolaiovych, Polovets Mykola Pavlovych
Назва патенту російськоюУстройство для опускания и подъема плавающего объекта
Автори російськоюТоропов Борис Николаевич, Половец Николай Павлович
МПК / Мітки
МПК: B63B 23/00
Мітки: пристрій, спускання, плаваючого, об'єкта, підіймання
Код посилання
<a href="https://ua.patents.su/4-19255-pristrijj-dlya-spuskannya-ta-pidijjmannya-plavayuchogo-obehkta.html" target="_blank" rel="follow" title="База патентів України">Пристрій для спускання та підіймання плаваючого об’єкта</a>
Пристрій для термінового спускання
Номер патенту: 13664
Опубліковано: 25.04.1997
Автори: Оніщенко Микола Павлович, Оніщенко Володимир Миколайович
МПК: A62B 1/00
Мітки: термінового, пристрій, спускання
Формула / Реферат:
Устройство для экстренного спуска, содержащее гибкие силовые элементы, соединенные между собой, присоединительные карабины с гибкими звеньями и элементы крепления к человеку, отличающееся тем, что, с целью повышения эффективности применения, оно снабжено жесткой штангой, связанной с гибкими звеньями присоединительных карабинов и с одним из концов силовых элементов, планкой, связанной с противоположными концами силовых элементов,...
Підйомний кран
Номер патенту: 3094
Опубліковано: 26.12.1994
Автор: Дьяченко Костянтин Іванович
МПК: B66C 23/00
Формула / Реферат:
Подъемный кран, содержащий башню (стойку, колонну, мачту), опорно-поворотное устройство (платформу) на раме, стрелу (балочную стрелу с грузовой кареткой), противовес, грузовую и стреловую лебедки с системой канатов, запасованных в блоки, орган захвата, отличающийся тем, что на вертикальном отрезке грузового каната между верхним блоком и грузовой лебедкой закреплен контргруз, немного меньший по весу от веса органа захвата.
Вантажопідйомний пристрій
Номер патенту: 12504
Опубліковано: 28.02.1997
Автори: Кіяшко Ігор Едуардович, Ткачов Анатолій Вікторович, Ухов Олександр Васильович, Семенюк Володимир Федорович, Номерованний Борис Семенович
МПК: B66C 17/00, B66C 6/00
Мітки: пристрій, вантажопідйомний
Формула / Реферат:
Грузоподъемное устройство, содержащее пролетное строение, установленную на нем грузовую тележку, с установленными на ней обводными блоками, грузовой блок, барабан лебедки, стяжной канат, один конец которого закреплен на барабане лебедки, и разгрузочную систему, отличающееся тем, что разгрузочная система выполнена в виде стяжных блоков, закрепленных на концах пролетного строения, а барабан лебедки расположен под пролетным строением ниже...
Пристрій підключення дощувальної машини до гідранту закритої зрошувальної мережі
Номер патенту: 5849
Опубліковано: 29.12.1994
Автори: Волобой Володимир Іванович, Лоох Владімір Робертовіч
МПК: A01G 25/02, A01G 25/09
Мітки: дощувальної, підключення, зрошувальної, машини, пристрій, закритої, гідранту, мережі
Формула / Реферат:
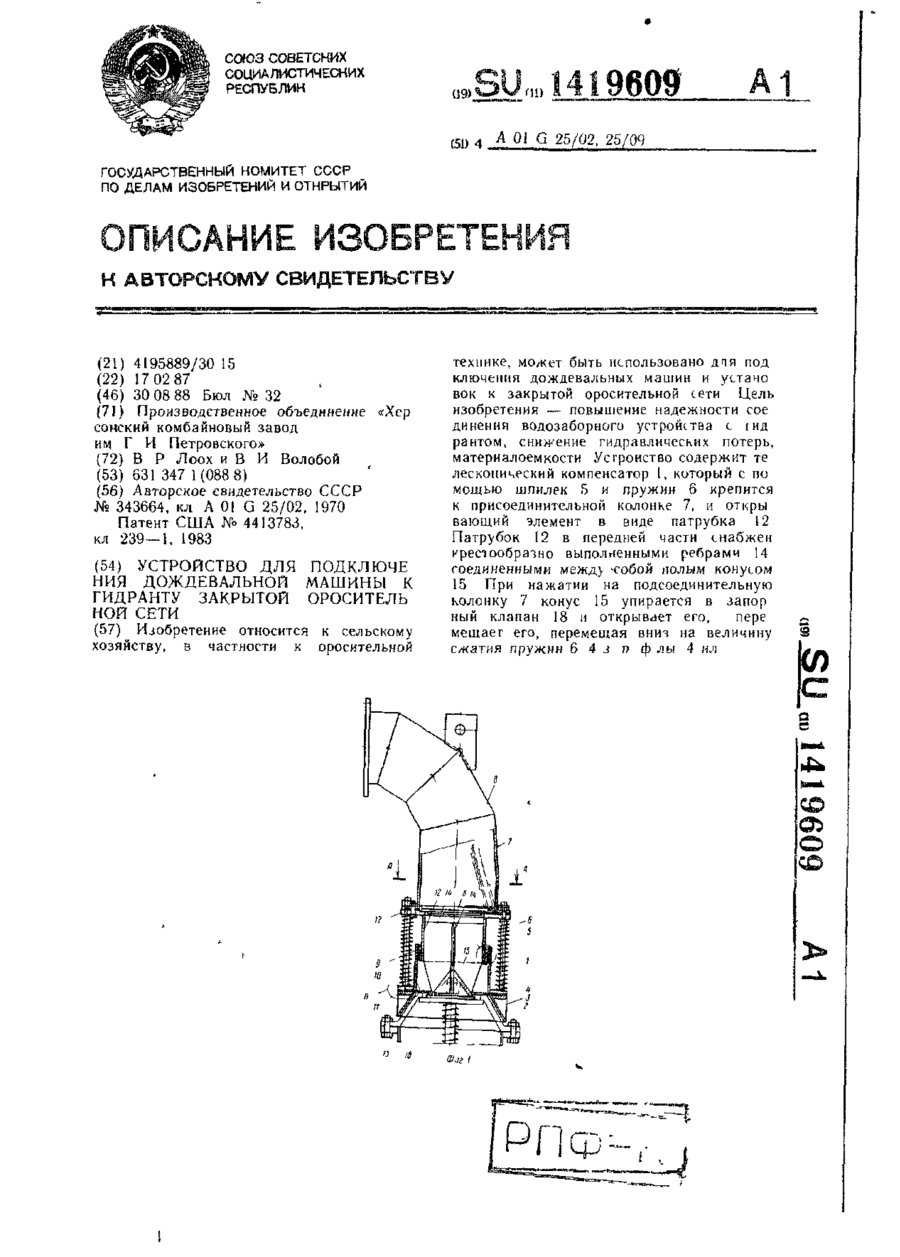
1. Устройство для подключения дождевальной машины к гидранту закрытой оросительной сети, включающее подсоединительную колонку с коленом, подпружиненный телескопический компенсатор с направляющим конусом, открывающий элемент, взаимодействующий с гидрантом, жестко связанный с подсоединительной колонкой, обратный клапан и уплотнение отличающееся тем, что, с целью повышения надежности, снижения гидравлических потерь, материалоемкости,...
Пристрій для запобігання аварійному руйнуванню металоконструкцій вантажопідйомних кранів
Номер патенту: 12717
Опубліковано: 28.02.1997
Автори: Мінаков Володимир Миколайович, Мартовицький Леонід Максимович, Токарєв Володимир Петрович, Гальченко Лариса Володимирівна
МПК: E04G 23/02
Мітки: аварійному, запобігання, пристрій, руйнуванню, вантажопідйомних, металоконструкцій, кранів
Текст:
...признаки, отличающие решение от прототипа, не обнаружены и решение ясным образом не следует из уровня техники, на основании Vroro можно сделать вывод, что решение удовлетворяет критерию "изобретательский уровень". Установка гибких стальных канатов в качестве предохранительных элементов с 5 напуском и рядом с растянутыми элементами металлоконструкции позволяет ее эксплуатировать без нарушения условий вплоть до разрушения растянутого...
Попередній патент: Спосіб діагностики раку щитовидної залози
Наступний патент: Спосіб одержання лецитину
Випадковий патент: Рама металургійної платформи