Спосіб контролю неспіввісності валів
Номер патенту: 21169
Опубліковано: 15.03.2007
Автори: Гучин Вадим Павлович, Мялковський Валентин Йосипович, Грядущий Володимир Борисович, Тімохін Юрій Віталійович, Романов Віктор Олександрович
Формула / Реферат
Спосіб контролю неспіввісності валів, відповідно до якого на бічній поверхні першого вала встановлюють механізм закріплення із джерелом лазерного випромінювання, а на бічній поверхні другого вала встановлюють механізм закріплення з телевізійною камерою, джерело лазерного випромінювання розташовують у горизонтальній площині, а телевізійну камеру розташовують паралельно геометричній осі таким чином, щоб відображення світлової плями на екрані монітора персональної ЕОМ перебувало в його геометричному центрі, визначають координати центра світлової плями, після чого повертають обидва вали в одному напрямку на 90°, 180°, 270°, який відрізняється тим, що у верхньому початковому положенні (0°), визначають дві координати центра світлової плями - горизонтальну Хв1 і вертикальну Ув1, потім обертають другий вал на (90°) у праве положення, а перший вал - до розташування джерела випромінювання проти телекамери, теж визначають дві координати центра світлової плями - вертикальну Уп1 і горизонтальну Хп1, а в нижньому (180°) і лівому (270°) положеннях - відповідно вертикальну координату Ун1 при горизонтальній Хн1 = Хв1, і горизонтальну Хл1 при вертикальній Ул1 = Уп1, переміщають джерело лазерного випромінювання на відстань L і проводять аналогічні виміри у верхньому та правому положеннях Хв2, Ув2, Хп2, Уп2, у нижньому положенні вертикальну координату Ун1 визначають при Хн2 = Хв2, а в лівому положенні горизонтальну координату Хл2 - при вертикальній Ул2 = Уп2, визначають радіальні й кутові параметри неспіввісності у вертикальній площині за формулами:
в вертикальній площині ![]() ,
, ![]() , а в горизонтальній
, а в горизонтальній ![]() ,
, ![]() .
.
Текст
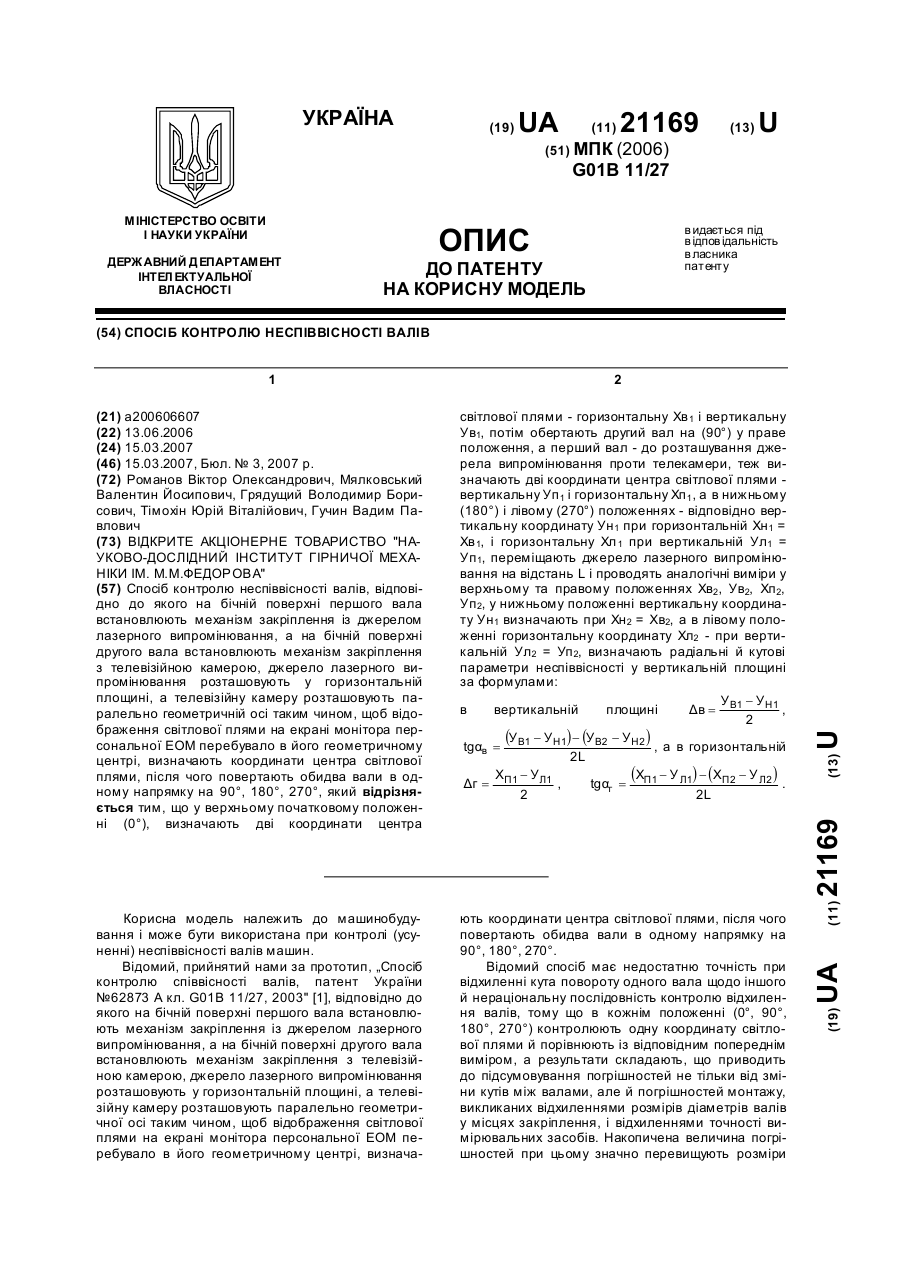
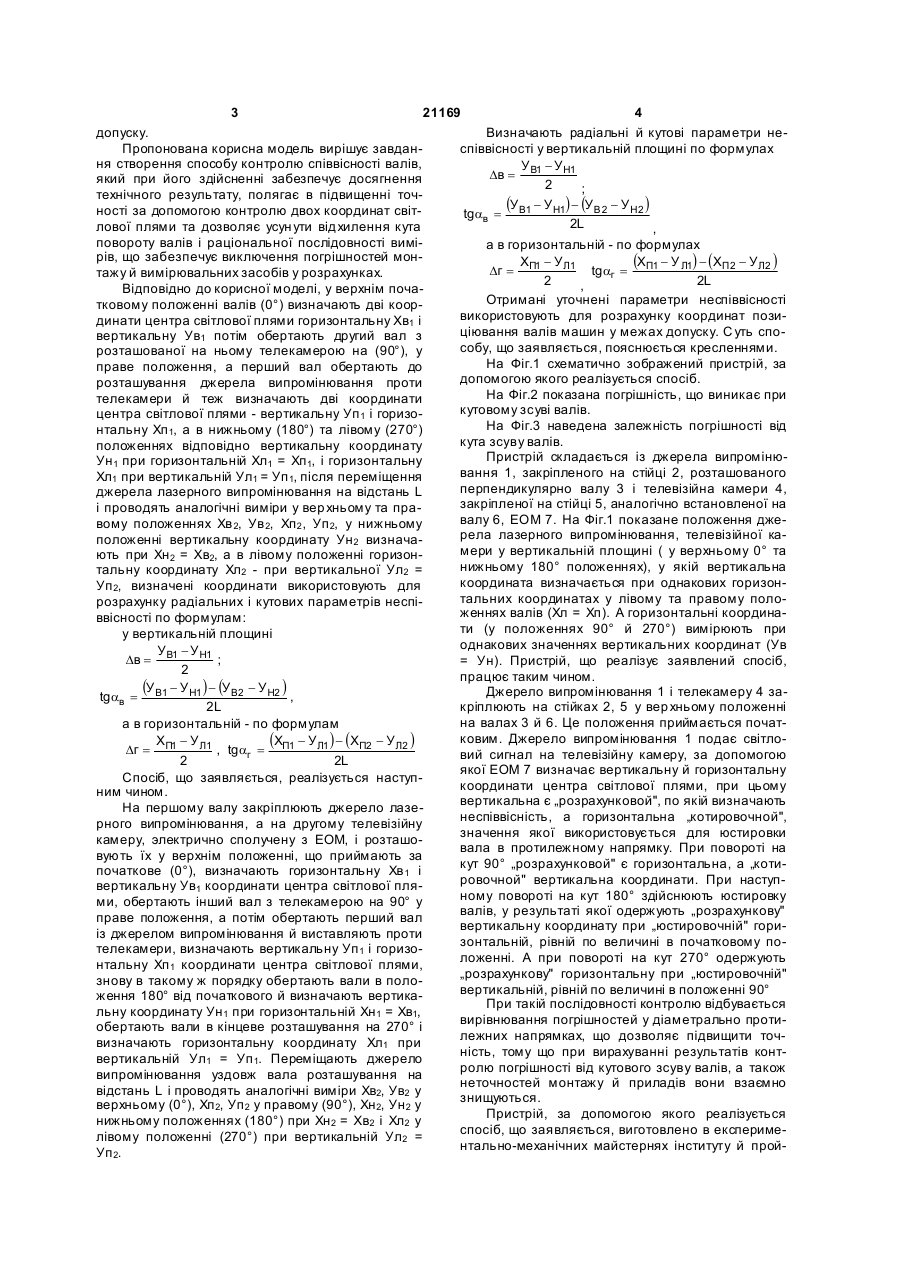
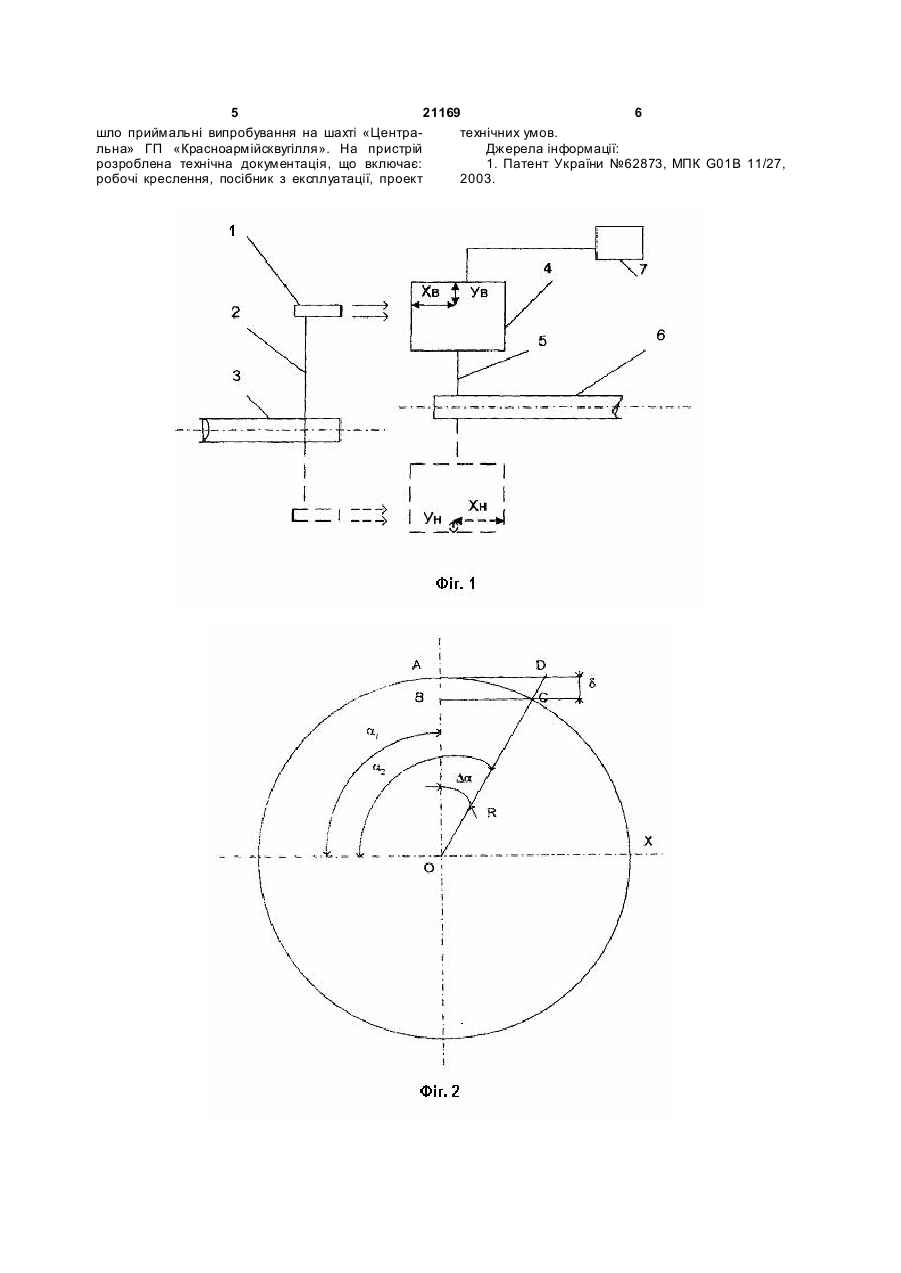
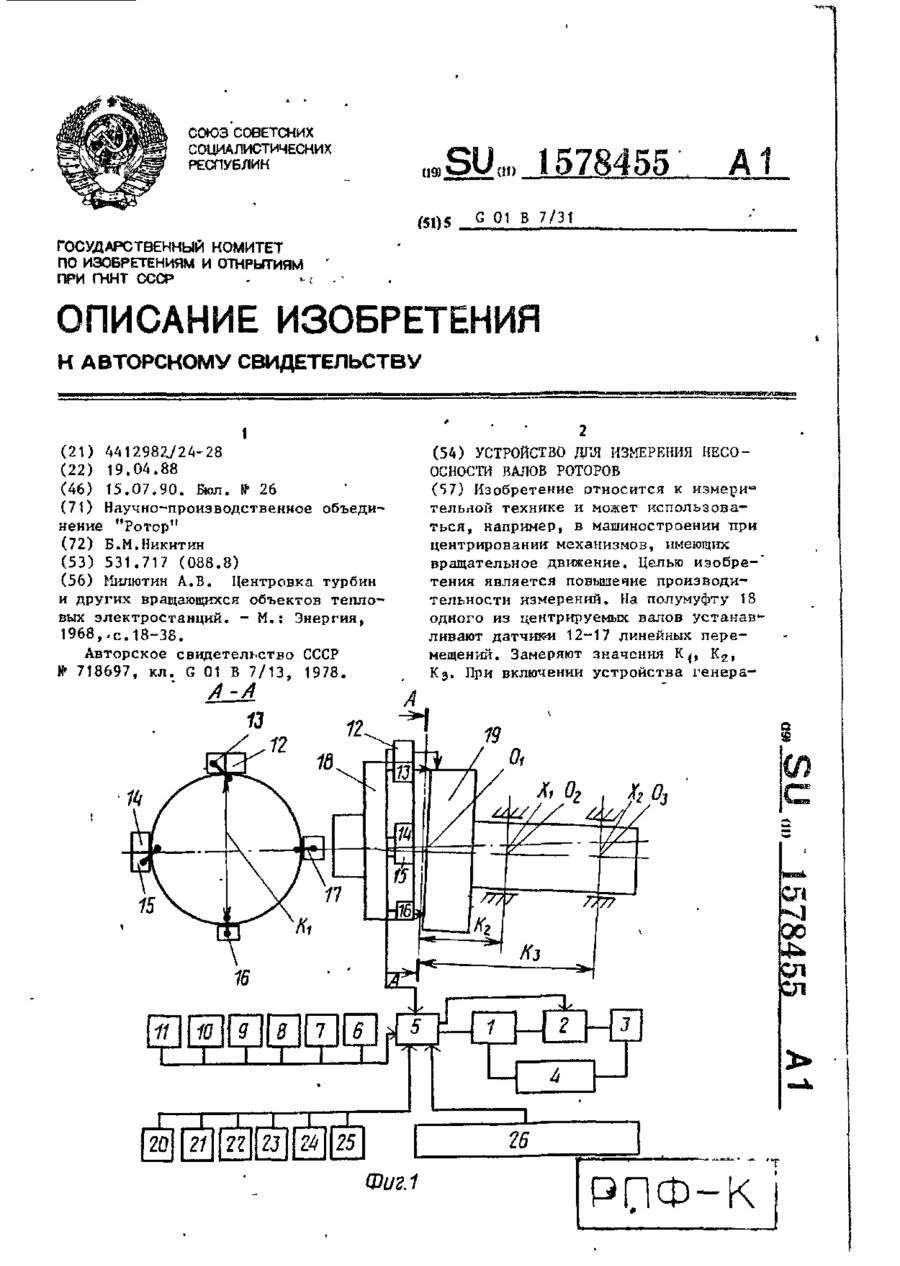
Спосіб контролю неспіввісності валів, відповідно до якого на бічній поверхні першого вала встановлюють механізм закріплення із джерелом лазерного випромінювання, а на бічній поверхні другого вала встановлюють механізм закріплення з телевізійною камерою, джерело лазерного випромінювання розташовують у горизонтальній площині, а телевізійну камеру розташовують паралельно геометричній осі таким чином, щоб відображення світлової плями на екрані монітора персональної ЕОМ перебувало в його геометричному центрі, визначають координати центра світлової плями, після чого повертають обидва вали в одному напрямку на 90°, 180°, 270°, який відрізняється тим, що у верхньому початковому положенні (0°), визначають дві координати центра U 2 (19) 1 3 21169 4 допуску. Визначають радіальні й кутові параметри неПропонована корисна модель вирішує завданспіввісності у вертикальній площині по формулах ня створення способу контролю співвісності валів, У - У Н1 Dв = В1 який при його здійсненні забезпечує досягнення 2 ; технічного результату, полягає в підвищенні точ(УВ1 - УН1) - (УВ 2 - УН2 ) ності за допомогою контролю двох координат світtg aв = 2L лової плями та дозволяє усун ути відхилення кута , повороту валів і раціональної послідовності виміа в горизонтальній - по формулах рів, що забезпечує виключення погрішностей монX - У Л1 (X - У Л1) - (XП2 - УЛ2 ) Dг = П1 tg aг = П1 тажу й вимірювальних засобів у розрахунках. 2 2L , Відповідно до корисної моделі, у верхнім почаОтримані уточнені параметри неспіввісності тковому положенні валів (0°) визначають дві коорвикористовують для розрахунку координат позидинати центра світлової плями горизонтальну Хв1 і ціювання валів машин у межах допуску. С уть сповертикальну Ув1 потім обертають другий вал з собу, що заявляється, пояснюється кресленнями. розташованої на ньому телекамерою на (90°), у На Фіг.1 схематично зображений пристрій, за праве положення, а перший вал обертають до допомогою якого реалізується спосіб. розташування джерела випромінювання проти На Фіг.2 показана погрішність, що виникає при телекамери й теж визначають дві координати кутовому зсуві валів. центра світлової плями - вертикальну Уп 1 і горизоНа Фіг.3 наведена залежність погрішності від нтальну Хп 1, а в нижньому (180°) та лівому (270°) кута зсуву валів. положеннях відповідно вертикальну координату Пристрій складається із джерела випромінюУн 1 при горизонтальній Хл1 = Хп 1, і горизонтальну вання 1, закріпленого на стійці 2, розташованого Хл1 при вертикальній Ул1 = Уп 1, після переміщення перпендикулярно валу 3 і телевізійна камери 4, джерела лазерного випромінювання на відстань L закріпленої на стійці 5, аналогічно встановленої на і проводять аналогічні виміри у вер хньому та правалу 6, ЕОМ 7. На Фіг.1 показане положення джевому положеннях Хв 2, Ув 2, Хп 2 , Уп 2, у нижньому рела лазерного випромінювання, телевізійної каположенні вертикальну координату Ун 2 визначамери у вертикальній площині ( у верхньому 0° та ють при Хн 2 = Хв2, а в лівому положенні горизоннижньому 180° положеннях), у якій вертикальна тальну координату Хл2 - при вертикальної Ул2 = координата визначається при однакових горизонУп 2, визначені координати використовують для тальних координатах у лівому та правому полорозрахунку радіальних і кутових параметрів неспіженнях валів (Хл = Хп). А горизонтальні координаввісності по формулам: ти (у положеннях 90° й 270°) вимірюють при у вертикальній площині однакових значеннях вертикальних координат (Ув У - У Н1 Dв = В1 ; = Ун). Пристрій, що реалізує заявлений спосіб, 2 працює таким чином. (УВ1 - УН1 ) - (УВ2 - УН2 ) , Джерело випромінювання 1 і телекамеру 4 заtg aв = 2L кріплюють на стійках 2, 5 у вер хньому положенні на валах 3 й 6. Це положення приймається почата в горизонтальній - по формулам ковим. Джерело випромінювання 1 подає світлоXП1 - У Л1 (XП1 - УЛ1 ) - (XП2 - УЛ2 ) Dг = , tg aг = вий сигнал на телевізійну камеру, за допомогою 2 2L якої ЕОМ 7 визначає вертикальну й горизонтальну Спосіб, що заявляється, реалізується наступкоординати центра світлової плями, при цьому ним чином. вертикальна є „розрахунковой", по якій визначають На першому валу закріплюють джерело лазенеспіввісність, а горизонтальна „котировочной", рного випромінювання, а на другому телевізійну значення якої використовується для юстировки камеру, электрично сполучену з ЕОМ, і розташовала в протилежному напрямку. При повороті на вують їх у верхнім положенні, що приймають за кут 90° „розрахунковой" є горизонтальна, а „котипочаткове (0°), визначають горизонтальну Хв 1 і ровочной" вертикальна координати. При наступвертикальну Ув1 координати центра світлової пляному повороті на кут 180° здійснюють юстировку ми, обертають інший вал з телекамерою на 90° у валів, у результаті якої одержують „розрахункову" праве положення, а потім обертають перший вал вертикальну координату при „юстировочній" гориіз джерелом випромінювання й виставляють проти зонтальній, рівній по величині в початковому потелекамери, визначають вертикальну Уп 1 і горизоложенні. А при повороті на кут 270° одержують нтальну Хп 1 координати центра світлової плями, „розрахункову" горизонтальну при „юстировочній" знову в такому ж порядку обертають вали в половертикальній, рівній по величині в положенні 90° ження 180° від початкового й визначають вертикаПри такій послідовності контролю відбувається льну координату Ун 1 при горизонтальній Хн 1 = Хв1, вирівнювання погрішностей у діаметрально протиобертають вали в кінцеве розташування на 270° і лежних напрямках, що дозволяє підвищити точвизначають горизонтальну координату Хл1 при ність, тому що при вирахуванні результатів контвертикальній Ул1 = Уп 1. Переміщають джерело ролю погрішності від кутового зсуву валів, а також випромінювання уздовж вала розташування на неточностей монтажу й приладів вони взаємно відстань L і проводять аналогічні виміри Хв2, Ув2 у знищуються. верхньому (0°), Хп 2, Уп 2 у правому (90°), Хн 2, Ун 2 у Пристрій, за допомогою якого реалізується нижньому положеннях (180°) при Хн 2 = Хв2 і Хл2 у спосіб, що заявляється, виготовлено в експеримелівому положенні (270°) при вертикальній Ул2 = нтально-механічних майстернях інституту й пройУп . 2 5 21169 6 шло приймальні випробування на шахті «Центратехнічних умов. льна» ГП «Красноармійсквугілля». На пристрій Джерела інформації: розроблена технічна документація, що включає: 1. Патент України №62873, МПК G01B 11/27, робочі креслення, посібник з експлуатації, проект 2003. 7 Комп’ютерна в ерстка А. Крулевський 21169 8 Підписне Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for verification of spindle disalignment
Автори англійськоюRomanov Viktor Oleksandrovych, Mialkovskyi Valentyn Yosypovych, Hriaduschyi Volodymyr Borysovych, Tymokhin Yurii Vitaliiovych
Назва патенту російськоюСпособ контроля несоосности валов
Автори російськоюРоманов Виктор Александрович, Мялковский Валентин Иосифович, Грядущий Владимир Борисович, Тимохин Юрий Витальевич
МПК / Мітки
МПК: G01B 11/27
Мітки: неспіввісності, валів, спосіб, контролю
Код посилання
<a href="https://ua.patents.su/4-21169-sposib-kontrolyu-nespivvisnosti-valiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб контролю неспіввісності валів</a>
Спосіб контролю співвісності валів
Номер патенту: 62873
Опубліковано: 15.12.2005
Автори: Мялковський Валентин Йосипович, Грядущий Борис Абрамович, Логвиненко Володимир Іванович, Чехлатий Микола Олександрович
МПК: G01B 11/27, G01B 5/24
Мітки: співвісності, спосіб, валів, контролю
Формула / Реферат:
Спосіб одержання металевого порошку включає підготовку шихти на основі стружкових відходів чавуну, її термічну обробку, подрібнення спеку та розсів отриманого порошку. В процесі підготовки шихти стружкові відходи чавуну змішують з порошком або стружкою титану. Термічна обробка шихти включає відпал в середовищі нейтральних газів, водню або в вакуумі.
Пристрій для виміру неспіввісності валів машин
Номер патенту: 60854
Опубліковано: 15.10.2003
Автори: Романов Віктор Олександрович, Мялковський Валентин Йосипович, Манець Іван Григорович
МПК: G01B 5/24
Мітки: пристрій, виміру, валів, машин, неспіввісності
Формула / Реферат:
Пристрій для вимірювання неспіввісності валів машин, що містить механізм закріплення з гнучким ланцюгом, стійки й упори з вимірювальними приладами, який відрізняється тим, що в напрямку, протилежному приладам і упорам, встановлюється зрівноважувальний вантаж з масою, яка розраховується за формулою :де
Пристрій для вимірювання неспіввісності валів роторів
Номер патенту: 4144
Опубліковано: 27.12.1994
Автор: Нікітін Борис Михайлович
МПК: G01B 7/31, G01N 27/00
Мітки: неспіввісності, роторів, пристрій, вимірювання, валів
Формула / Реферат:
1. Устройство для измерения и несоосности валов роторов, содержащее первую пару датчиков линейных перемещении, устанавливаемых на периферии первого из контролируемых валов, генератор, блок коммутации, подключенный соответствующими входами к датчикам линейных перемещении первой пары и генератору, фазочувст-вительный детектор, подключенный первым входом к выходу блока коммутации, вторым - к второму выходу генератора, и регистратор,...
Прилад для контролю макрогеометрії валів
Номер патенту: 59723
Опубліковано: 15.09.2003
Автори: Колот Лідія Петрівна, Павленко Олександр Володимирович
МПК: B23Q 15/007
Мітки: макрогеометрії, прилад, валів, контролю
Формула / Реферат:
Прилад для контролю макрогеометрії валів, що містить пневматичну скалку з центруючими поясками, сопла для підведення повітря та пристрій для реєстрації показників, який відрізняється тим, що містить три вимірювальні елементи, які не мають безпосереднього контакту з вимірюваною поверхнею, а встановлені відносно неї з регламентованим зазором.
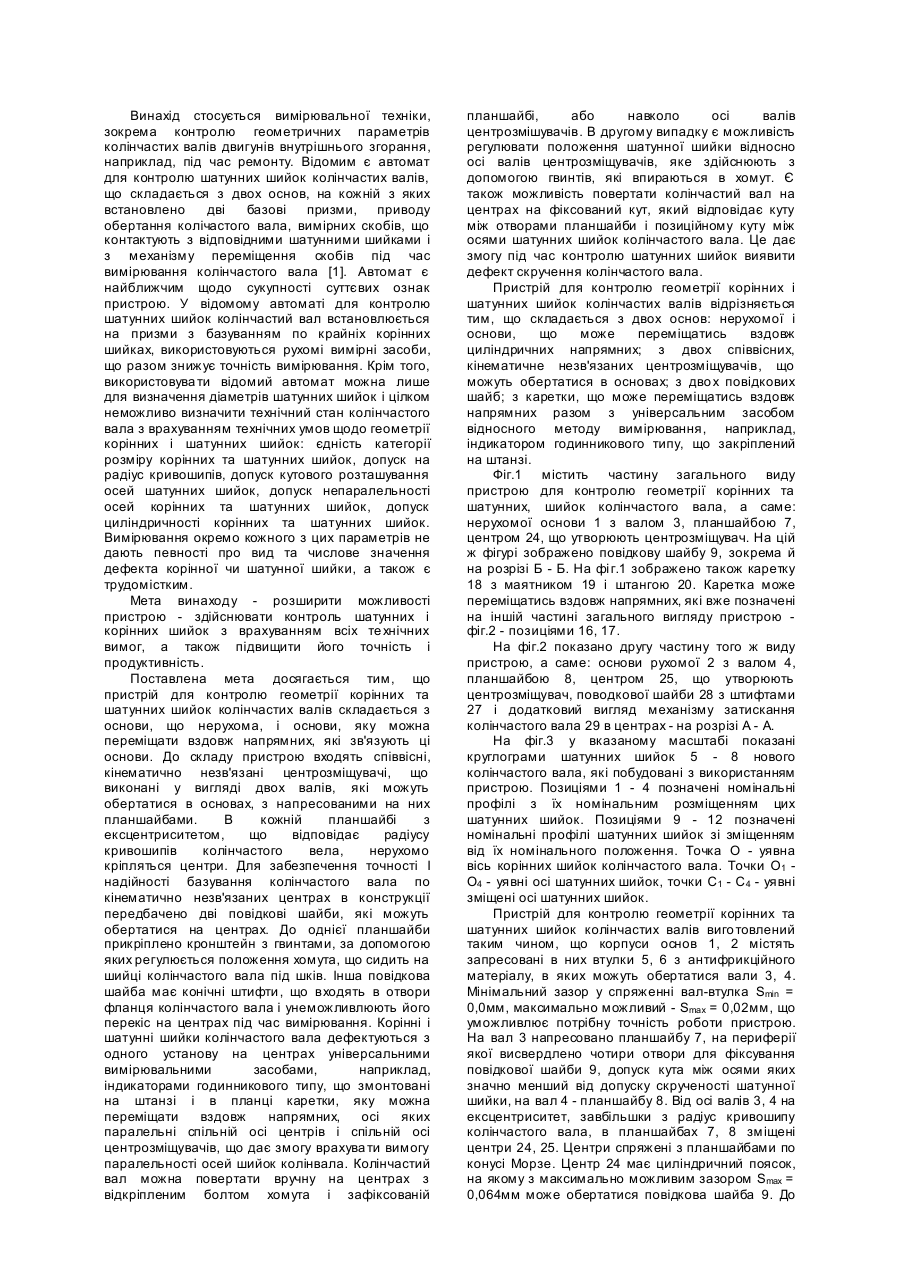
Пристрій для контролю геометрії корінних та шатунних шийок колінчастих валів
Номер патенту: 24232
Опубліковано: 07.07.1998
Автори: Сенчук Степан Романович, Семкович Олександр Дмитрович, Оліскевич Мирослав Степанович
МПК: G01B 5/08
Мітки: пристрій, геометрії, колінчастих, корінних, шийок, шатунних, валів, контролю
Формула / Реферат:
Пристрій для контролю геометрії корінних та шатунних шийок колінчастих валів, що складається з двох основ, вимірювального засобу і механізму його переміщення відносно відповідної шатунної шийки, який відрізняється тим, що пристрій складається з двох співвісних, кінематично незв'язаних центрозмішувачів, кожен з яких виконаний у вигляді вала з нерухомою на ньому планшайбою і нерухомим у ній центром; з двох поводкових шайб, які можуть обертатися...
Попередній патент: Тест-система імуноферментна підвищеної чутливості для кількісного визначення поверхневого антигену (hbsag) вірусу гепатиту b (dia-hbsag-sensitive)
Наступний патент: Спосіб доменної плавки
Випадковий патент: Бездимний тютюновий виріб, неводна придатна для екструдування композиція та спосіб виготовлення тютюнового виробу