Пристрій для вимірювання координат об’єкту
Номер патенту: 24137
Опубліковано: 30.10.1998
Автори: Гриценко Володимир Ілліч, Корнієнко Григорій Іванович, Підгірний Євген Іванович, Любімов Олександр Дмитрович
Формула / Реферат
УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ОБЪЕКТА, содержащее последовательно соединенные синхронизатор, телевизионную передающую камеру, аналого-цифровой преобразователь (АЦП), блок суммирования, блок вычитания, блок сравнения и регистр значений перепада, выход которого соединен с вторым входом блока сравнения, а также блок вычисления перемещения, блокзадержки, вход которого объединен с входом блока суммирования, регистр координаты по оси X и регистр координаты по оси У, первые входы которых соединены соответственно с вторым и третьим выходами синхронизатора, а вторые входы объединены с первым входом регистра значений перепада, а второй вход блока сравнения объединен со вторым входом регистра значений перепада, о т л и ч а ю щ е е с я тем, что, с целью повышения точности измерения координат, введены реверсивный счетчик, первый и второй входы которого соединены соответственно с выходом и входом блока задержки, а выход - с вторым входом блока вычитания, триггер управления и блок электронного масштабирования, по следовательно включенные между четвертым выходом синхронизатора и маркерным входом телевизионной пере дающей камеры, триггер сдвига и первый и второй суммирующие счетчики, первые входы которых соединены соответственно с выходами регистров координат по осям У и X, вторые объединенные входы соединены с выходом триггера сдвига, а выходы - с первым и вторым входами блока вычисления перемещений, при этом вход триггера сдвига соединен с пятым выходом синхронизатора, а объединенные третьи входы регистров координат по осям X и У - с выходом триггера управления.
Текст
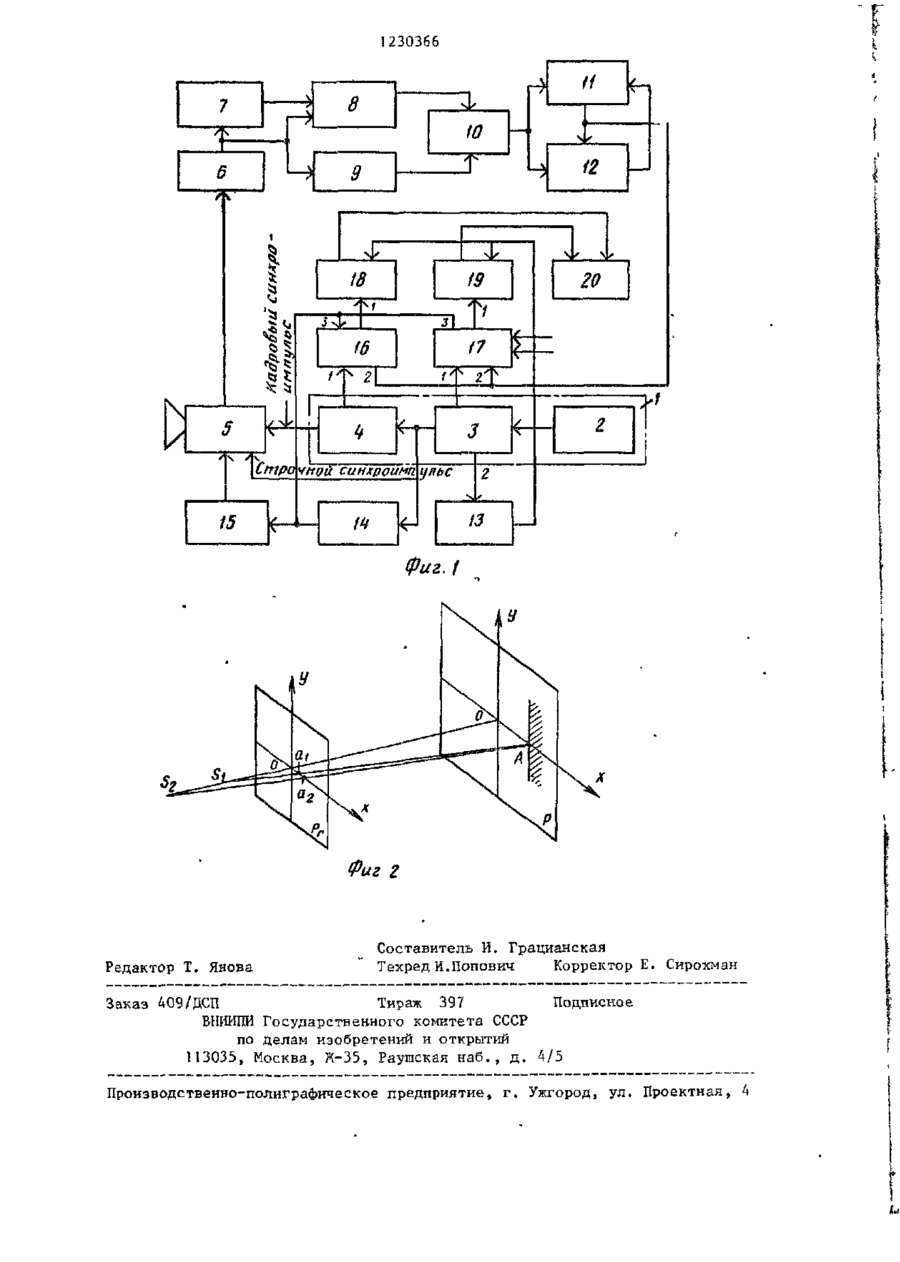
УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ОБЪЕКТА, содержащее последовательно соединенные синхронизатор, телевизионную передающую камеру, аналого-цифровой преобразователь (АЦП), блок суммирования, блок вычитания, блок сравнения и регистр значений перепада, выход которого соединен с вторым входом блока сравнения, а также блок вычисления перемещения, блок задержки, вход которого объединен с входом блока суммирования, регистр координаты по оси X и регистр коорпинаты по оси У, первые входы которых соединены соответственно с вторым и третьим выходами синхронизатора, а вторые входы объединены с первым входом регистра значений перепада, а второй вход блока сравнения объединен со вторым входом регистра значений перепада, о т л и ч а ю щ е е с я тем, что, с целью повышения точности измерения координат, введены реверсивный счетчик, первый и второй входы кото-* рого соединены соответственно с выходом и входом блока задержки, а выход - с вторым входом блока вычитания, триггер управления и блок электронного масштабирования, последовательно включенные между четвертым выходом синхронизатора и маркерным входом телевизионной передающей камеры, триггер сдвига и да первый и второй суммирующие счетчики, первые входы которых соединены соответственно с выходами регистров координат по осям У и X, вторые объединенные входы соединены с выходом триггера сдвига, а выходы - с первым и вторым входами блока вычисления перемещений, при этом вход триггера сдвига соединен с пятым выходом синхронизатора, а объединенные третьи входы регистров координат по осям X и У - с выходом триггера управления. 1 1210366 Изобретение относится к телевирепада, регистрон 16 и і 7 координат, зионным измерительным системам и суммирующих счетчиков 18 и 19 и может быть использовано для бесконпроизводят очистку (установку в "0") всех перечисленных блоков, обладаютактного измерения координат объекта. щих памятью от возможных ложных заЦелью изобретения является повышенесений кода. Видеосигнал с выхода ние точности измерения координат. телевизионной передающей камеры 5 На фиг. 1 представлена электрипоступает на аналого-цибровой преобческая принципиальная схема устройразователь 6, с выхода которого цифства для измерения координат объек10 ровой код поступает на вход блока 9 та; на фиг. 2 - схема построения суммирования, на суммирующий вход изображения точки профиля объекта для реверсивного счетчика 8 непосреддвух различных значений коэффициента ственно и на вычитающий вход через электронного (или оптического)' масшблок 7 задержки, выполненный на табирования. 15 сдвиговом регистре. Так как блок 7 Устройство для измерения коордизадержки реализует задержку на пнат объекта содержит синхронизатор тактов, то блок 9 суммирования и 1, генератор 2 тактовых импупьсов, реверсивный счетчик 8 накапливают счетчик 3 отсчетов, счетчик '•* строк, суммы п~отсчетов видеосигнала, телевизионную передающую камеру которые усредняются (за счет подклю(ТПК) 5, аналого-цифровой преобразо- 20 чения только старших значащих разряватель (АЦП) 6, бпок 7 задержки, редов) и поступают на соответствующие версивный счетчик 8, блок 9 суммировходы блока 10 вычитания. Полученвания, блок 10 вычитания, блок 11 ная разность усредненных сумм сравсравнения, регистр 12 значений перенивается в блоке 11 сравнения со пада, триггер сдвига 13, триггер уп- 25 значением соответствующего перепада равления 14, блок 15 электронного яркости, записанного в регистре 12 (или оптического) масштабирования, значений перепада. В исходном состорегистр 16 координат по оси X, реянии в течении n-тактов в регистре гистр 17 координат по оси У, сумми12 значений перепада занесены " 0 м _ рующий счетчик 18f суммирующий счет, 30 в силу равенства усредненных сумм чик 19, блок 20 вычисления перемереверсивного счетчика 8 и блока 9 щения . суммирования для одних и тех же пУстройство для измерения координат отсчетов видеосигнала. В (п+1)-такте объекта работает следующим образом. работы на выходе блока 7 задержки 35 появляется первое значение отсчета Общая синхронизация работы блоков устройства осуществляется имвидеосигнала первой строки сканиропульсами генератора 2 тактовых имвания, которое поступает на вычитапульсов, которые поступают на синхроющий вход реверсивного счетчика 8, низирующие входы аналого-цифрового где отнимается от суммы п-отсчетов, преобразователя 6, блока 7 задержки, 40 при этом в темпе поступления (п+1) блока 9 суммирования, регистра 12 значение отсчета прибавляется через значений перепада, регистров 16 и 17 суммирующий вход. координат, суммирующих счетчиков 18, 19 и блока 20 вычисления перемещеТаким образом, в процессе работы ний. Одновременно импульсы с выхода 45 реверсивный счетчик 8 производит погенератора 2 тактовых импульсов последовательное усреднение С У М М Ы ия ступают на вход счетчиков 3 и 4, с п-текущих отсчетов, сканирующей вдоль выходов которых сигналы строчной и строчной развертки. кадровой синхронизации поступают Паралпельио в блоке 9 суммирова50 ния происходит усреднение всех пона телевизионную передающую камеру Ъ, Импульсы обратного хода по строследовательно поступающих отсчетов ке поступают на счетный вход триггевдоль этой же строки, причем число ра сдвига 13. отсчетов монотонно возрастает, в то В начале сканирования первой стровремя как число отсчетов, усредненных ки сигнал кадровой синхронизации 55 реверсивным счетчиком 8, остается поступает на установочные входы репостоянным и равным п. Бпок 10 щічиверсивного счетчика 8, блока 9 сумтания производит опредетиние текущемирования, регистра 12 значений пего значения разности, которая ерпв 230366 ный) триї герный --затвор, переключаенивается со значением перепада ярмый электрическими (или магнитными) кости регистра 12 в блоке 11 сравнесигналами. При этом одна точка А ния . В случае повышения текущего (фиг. 2 ) , принадлежащая профилю значения разности с выхода блока 10 объекта, для которой производят извычитания над содержимым регистра 12 мерение координат, имеет две точки значений перепада по команде с выхоизображения Q n и да блока 11 сравнения значения текудля двух соответствующих систем 0S f и OS^. Блок щих1 координат развертки по осям X и 15 электронно!о масштабирования осуУ заносятся в регистры 17 и 16, а ществляет линейное изменение масшзначение текущей разности - в регистр таба по осям ОХ и 0У на величину 12, где хранится до тех пор, пока блок 11 сравнения не выдаст очередК=2^ (или К= -^т)» г Д е ш=1,2,3... ного превышения. В конце строчной целые числа. В зависимости от велиразвертки (время обратного хода) чины и знака коэффициента изменения координаты точки растра, соответмасштаба под действием сигнала с ствующей наибольшему перепаду яркосвыхода триггера управления 14 значети, переписываются в суммирующие ние координат точки профиля объекта счетчики 18 и 19. в двоичном коде перед занесением в Аналогично происходит определение суммирующие счетчики 18 и 19 получает координат, профиля объекта (перепада дополнительный сдвиг вправо на с і яркости) для второй строки, с той разрядов (при увеличении масштаба лишь разницей, что по команде тригизображения) или на ш разрядов влегера управления 14, на счетный вход во (при уменьшении масштаба). которого поступают строчные синхроЗначения координат перепадов яримпульсы, каждая вторая строка раз- 25 кости второй строки (после m сдвивертки считывается для новой проекгов) заносятся в суммирующие счетции пространства, полученной из перчики 18 и 19, где складываются с вой при помощи линейного электронносоответствующими значениями коордиго (или оптического) преобразования нат в двоичном коде, найденными при масштаба (увеличения или уменьшения) сканировании первой строки. Выходной Блок электронного (или оптического) сигнал триггера сдвига 13, управляемасштабирования может быть выполнен мого строчным импульсом обратного хов виде двух различных объективов, да, сдвигает вправо полученную сумму имеющих одно поле зрения и работаюдвух отсчетов, реализуя вычисление щих на одну передающую телевизион35 среднего арифметического. Эти значеную камеру через механический или ния координат поступают в блок 20 электрооптический (жидко-кристальвычисления перемещений. 1230366 ff 8 to / s N -л 18 ТГ / * Ч 12 — 20 T3L 5 s II А Z г Строчной синхроимп 15 фаг.і Фиг 2 Редактор Т. Янова Составитель И. Грацианская Техред И.Попович Корректор Е. Сирохман Заказ 409/ДСП Тираж 397 Подписное ВНЙИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, К-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
ДивитисяДодаткова інформація
Автори англійськоюHrytsenko Volodymyr Illich, Liubimov Oleksandr Dmytrovych
Автори російськоюГриценко Владимир Ильич, Любимов Александр Дмитриевич
МПК / Мітки
Мітки: пристрій, вимірювання, координат, об'єкту
Код посилання
<a href="https://ua.patents.su/4-24137-pristrijj-dlya-vimiryuvannya-koordinat-obehktu.html" target="_blank" rel="follow" title="База патентів України">Пристрій для вимірювання координат об’єкту</a>
Пристрій для вимірювання фазового зсуву
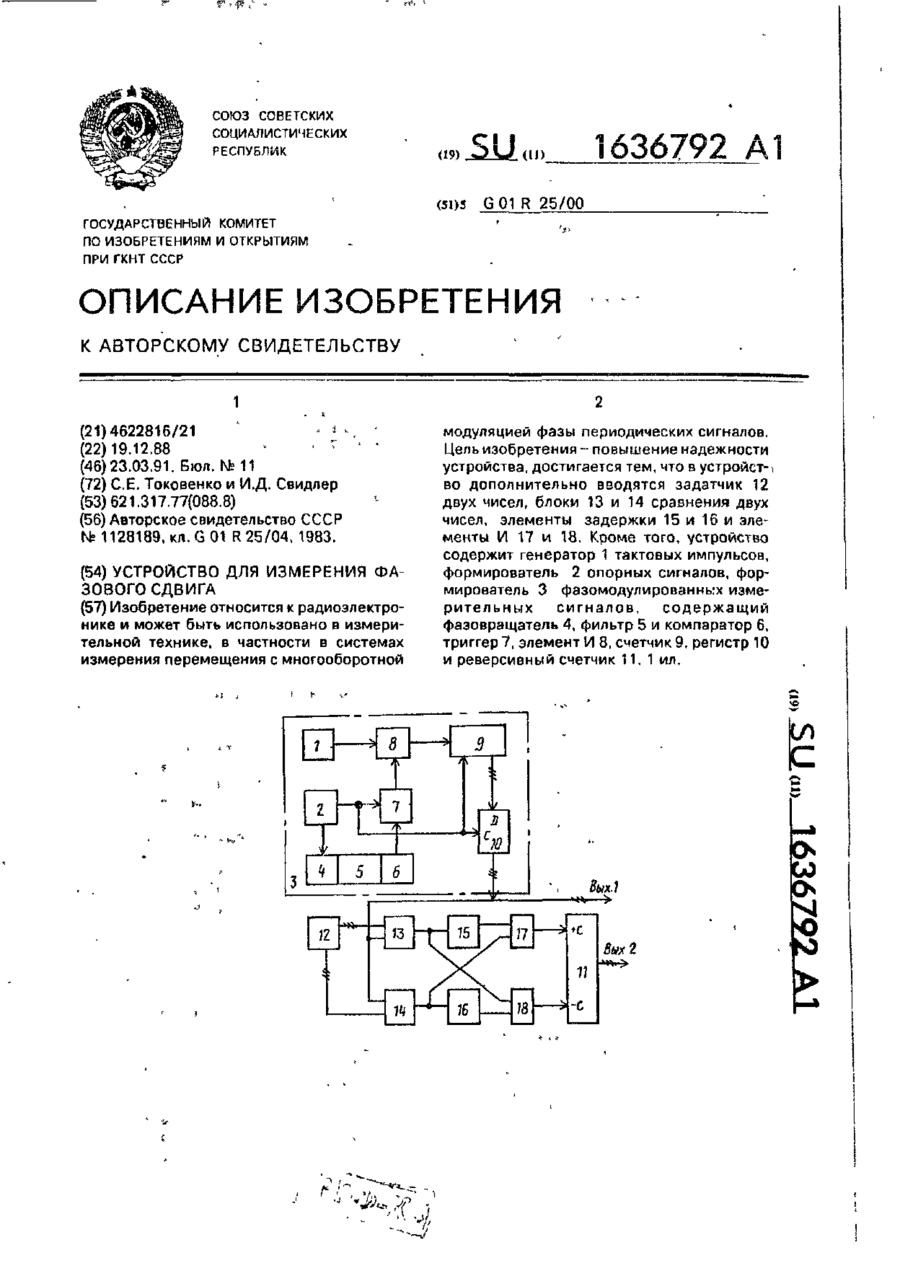
Номер патенту: 457
Опубліковано: 30.04.1993
Автори: Свідлер Ігор Давидович, Токовенко Степан Омелянович
МПК: G01R 25/00
Мітки: вимірювання, фазового, зсуву, пристрій
Формула / Реферат:
Формула изобретенияУстройство для измерения фазового сдвига, содержащее триггерный фазометр, выход которого является первым выходом устройства и реверсивный счетчик, выход которого является вторым выходом устройства, отличающееся тем, что, с целью повышения надежности устройства, в него дополнительно введены задатчик двух чисел, два блока сравнения двух чисел, два элемента задержки и два элемента И, причем выход триггерного фазометра...
Пристрій для обчислювання локальних середніх значень
Номер патенту: 15534
Опубліковано: 30.06.1997
Автор: Єлманов Сергій Олександрович
МПК: G06F 17/15
Мітки: обчислювання, локальних, середніх, пристрій, значень
Формула / Реферат:
(57) Устройство для вычисления локальных средних значений, содержащее блок деления, первую строку вычислительных узлов, каждый из которых состоит из двух сумматоров и двух регистров, причем в каждом вычислительном узле выходы первого и второго сумматоров соединены соответственно с информационными входами одноименных регистров, первые входы сумматоров первого вычислительного узла соединены со входом задания нулевого кода устройства, выходом...
Пристрій для вимірювання параметрів інерційних ланок
Номер патенту: 4063
Опубліковано: 27.12.1994
Автори: Загарій Генадій Іванович, Левочко Борис Степанович, Гусєв Павло Вікторович, Мамонов Анатолій Васильович, Гусєв Ігор Вікторович, Ситник Борис Тимофійович
МПК: G05B 23/02
Мітки: параметрів, вимірювання, інерційних, ланок, пристрій
Формула / Реферат:
Устройство для измерения параметров инерционных звеньев, содержащее блок вычисления параметров передаточной функции, первый и второй фильтры, выходы которых подключены соответственно к первому и второму входам блока вычисления параметров передаточной функции, выход которого является выходом устройства, а первые входы первого и второго фильтров подключены соответственно к выходу и входу исследуемого звена, вход которого является входом...
Пристрій для вимірювання кількості стічних вод, що скидаються в каналізаційний колектор
Номер патенту: 23377
Опубліковано: 31.08.1998
Автори: Теплицький Абрам Хунович, Єндовцев Ігор Віталійович, Бродський Анатолій Леонідович
МПК: F15B 15/18, G06F 1/00
Мітки: каналізаційний, стічних, скидаються, вод, пристрій, кількості, вимірювання, колектор
Формула / Реферат:
Устройство для измерения количества сточных вод, сбрасываемых в канализационный коллектор,, содержащее мерный объем, откачной насос с блоком автоматического управления, датчики уровня сточных вод, соединенные с входами блока автоматического управления откачным насосом, первый выход которого соединен с откачным насосом, и систему обработки информации, отличающееся тем, что мерный объем выделен в накопительной емкости станции откачки сточных...
Пристрій для вимірювання часових інтервалів
Номер патенту: 16804
Опубліковано: 29.08.1997
Автор: Бантюков Євген Миколайович
МПК: G04F 10/00
Мітки: вимірювання, пристрій, інтервалів, часових
Формула / Реферат:
1. Устройство для измерения временных интервалов, содержащее генератор импульсов, элемент И, к первому входу которого подключен выход генератора импульсов, формирователь им-пульсов, счетчик импульсов, суммирующий вход которого соединен с выходом элемента И, первый и второй регистры, блок сравнения, к вторым входам которого подключены первый регистр, триггер, первый вход которого соединен с выходом блока сравнения, блок элементов И,...
Попередній патент: Пристрій позиційної селекції інформації
Наступний патент: Пристрій для визначення чісла інверсій
Випадковий патент: Вимірювач кутової швидкості