Пристрій для вимірювання параметрів інерційних ланок
Номер патенту: 4063
Опубліковано: 27.12.1994
Автори: Загарій Генадій Іванович, Гусєв Павло Вікторович, Ситник Борис Тимофійович, Мамонов Анатолій Васильович, Гусєв Ігор Вікторович, Левочко Борис Степанович
Формула / Реферат
Устройство для измерения параметров инерционных звеньев, содержащее блок вычисления параметров передаточной функции, первый и второй фильтры, выходы которых подключены соответственно к первому и второму входам блока вычисления параметров передаточной функции, выход которого является выходом устройства, а первые входы первого и второго фильтров подключены соответственно к выходу и входу исследуемого звена, вход которого является входом устройства, отличающееся тем, что второй фильтр выполнен в виде последовательно соединенных блока вычитания, блока умножения и интегратора, выход которого подключен к первому входу блока вычитания и является выходом второго фильтра, первым входом которого является второй вход блока вычитания, а вторым входом - второй вход блока умножения, подключенный ко второму выходу первого фильтра, который выполнен самонастраивающимся с настраиваемой постоянной времени.
Текст
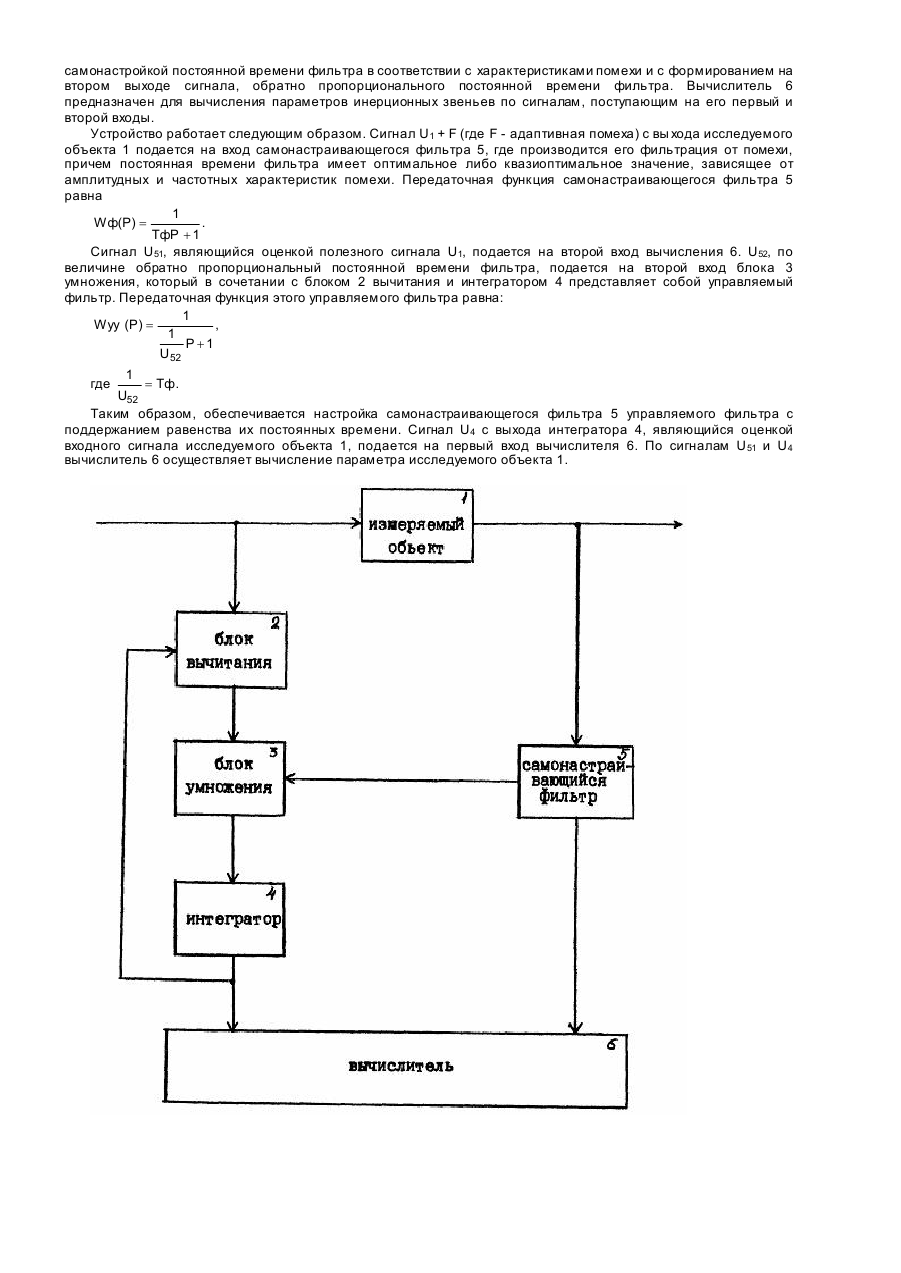
Предлагаемое устройство относится к области автоматического регулирования и может быть использовано для измерения параметров инерционных звеньев в условиях воздействия на них переменных помех при исследовании и наладке систем автоматического регулирования. Известно устройство для измерения параметров динамических звеньев систем управления [1], содержащее блок измерения и последовательно соединенные первый интегратор и первый блок масштабирования, подключенный выходом к входу второго интегратора, соединенного выходом с входом третьего интегратора, вход первого интегратора подключен к выходу исследуемого звена, а второй вход третьего интегратора через второй блок масштабирования соединен с выходом первого блока масштабирования, вход четвертого интегратора подключен к входу исследуемого звена, а выход - к второму входу второго интегратора, первый вход элемента сравнения подключен к выходу третьего интегратора, второй вход через третий блок масштабирования соединен с выходом первого блока масштабирования, а выход подключен к первому измерительному входу блока измерения, соединенного вторым и третьим измерительными входами с выходами соответственно второго и третьего интеграторов. Наиболее близким к заявляемому является устройство для измерения параметров инерционных звеньев [2] содержащее первый и второй интеграторы, подключенные выходами соответственно к первому и второму входам измерительного блока (в заявляемом решении - блок вычисления параметров передаточной функции), последовательно соединенные первый фильтр, подключенный входом к выходу исследуемого объекта, первый блок масштабирования и первый сумматор, последовательно соединенные второй блок масштабирования, подключенный входом к выходу первого блока масштабирования, и второй сумматор, второй вход которого подключен к выходу первого интегратора, второй фильтр, подключенный входом и выходом соответственно к входу исследуемого объекта и второму входу первого сумматора, выход которого через первое нелинейное звено соединен с входом первого интегратора, выход второго сумматора через второе нелинейное звено подключен к входу второго интегратора. Недостатком этого устройства является низкая точность измерения, обусловленная невозможностью обеспечения требуемого совпадения параметров фильтров, а также отсутствием зависимости характеристик фильтров от амплитудных и частотных характеристик помехи. Самое незначительное несовпадение значений постоянных времени фильтров (а значит, их передаточных функций) приводит либо к значительным ошибкам измерения параметров исследуемого объекта в устройстве прототипа, либо к потере его работоспособности. Кроме того, отсутствие зависимости постоянных времени фильтров от амплитудных и частотных характеристик помехи требует предварительной настройки фильтров на определение характеристик помехи, а при их изменении может привести к недостаточно эффективному подавлению помехи, и, следовательно, вызвать появление недоступных погрешностей измерения. В основу изобретения поставлена задача создания устройства для измерения параметров операционных звеньев, в котором повышение точности измерения обеспечивается путем поддержания равенства постоянных времени фильтров при осуществлении их самонастройки, благодаря чему улучшается качество управления в системах автоматического регулирования при воздействии переменных помех. Поставленная задача решается тем, что в устройстве для измерения параметров инерционных звеньев, содержащем блок вычисления параметров передаточной функции, первый и второй фильтры, выходы которых подключены соответственно к первому и второму входам блока вычисления .параметров передаточной функции, выход которого является выходом устройства, первые входы первого и второго фильтров подключены соответственно к выходу и входу исследуемого звена, вход которого является входом устройства, со гласно изобретению, второй фильтр выполнен в виде последовательно соединенных блока вычитания, блока умножения и интегратора, выход которого подключен к первому входу блока вычитания и является выходом второго фильтра, первым входом которого является второй вход блока вычитания, а вторым входом - второй вход блока умножения, подключенный ко второму выходу первого фильтра, который выполнен самонастраивающимся с настраиваемой постоянной времени. В заявляемом устройстве для измерения параметров инерционных звеньев первый (самонастраивающийся) фильтр установлен на выходе исследуемого объекта, где обычно выше уровень помех, а сигнал, обратно пропорциональный эквивалентной постоянной времени, с дополнительного выхода самонастраивающегося фильтра подается на второй (управляемый) фильтр, и обеспечивая равенство постоянной времени самонастраивающегося и управляемого фильтров, что обеспечивает подавление помехи и позволяет повысить точность измерения параметров инерционных звеньев. На чертеже представлена электрическая структурная схема устройства для измерения параметров инерционных звеньев. Устройство для измерения параметров инерционных звеньев содержит измеряемый объект 1, первый (самонастраивающийся) фильтр 5, второй (управляемый) фильтр, содержащий последовательно соединенные блок 2 вычитания, блок 3 умножения и интегратор 4. При этом вход измеряемого объекта 1 подключен к первому входу блока 2 вычитания, выход которого подключен к первому входу блока 3 умножения, выход которого подключен к входу интегратора 4, выход которого подключен к первому входу вычислителя 6 и второму входу блока вычитания, второй вход которого подключен к первому выходу самонастраивающегося фильтра 5, вход которого подключен к выходу измеряемого объекта, а второй выход подключен ко второму входу блока умножения. Блок 2 вычитания предназначен для вычисления алгебраической разности сигналов, поступающи х на его первый и второй входы. Блок 3 умножения формирует на выходе сигнал, равный произведению сигналов, поступающих на его первый и второй входы. Интегратор 4 предназначен для интегрирования сигнала, поступающего на его вход. Самонастраивающийся фильтр 5 осуществляет фильтрацию от помех сигнала, поступающего на его вход, а самонастройкой постоянной времени фильтра в соответствии с характеристиками помехи и с формированием на втором выходе сигнала, обратно пропорционального постоянной времени фильтра. Вычислитель 6 предназначен для вычисления параметров инерционных звеньев по сигналам, поступающим на его первый и второй входы. Устройство работает следующим образом. Сигнал U1 + F (где F - адаптивная помеха) с вы хода исследуемого объекта 1 подается на вход самонастраивающегося фильтра 5, где производится его фильтрация от помехи, причем постоянная времени фильтра имеет оптимальное либо квазиоптимальное значение, зависящее от амплитудных и частотных характеристик помехи. Передаточная функция самонастраивающегося фильтра 5 равна 1 Wф(Р) = . ТфР + 1 Сигнал U51, являющийся оценкой полезного сигнала U1, подается на второй вход вычисления 6. U52, по величине обратно пропорциональный постоянной времени фильтра, подается на второй вход блока 3 умножения, который в сочетании с блоком 2 вычитания и интегратором 4 представляет собой управляемый фильтр. Передаточная функция этого управляемого фильтра равна: 1 Wуу (Р) = , 1 Р +1 U52 1 = Тф. U52 Таким образом, обеспечивается настройка самонастраивающегося фильтра 5 управляемого фильтра с поддержанием равенства их постоянных времени. Сигнал U 4 с выхода интегратора 4, являющийся оценкой входного сигнала исследуемого объекта 1, подается на первый вход вычислителя 6. По сигналам U 51 и U4 вычислитель 6 осуществляет вычисление параметра исследуемого объекта 1. где
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice to measure relaxation circuit parameters
Автори англійськоюZaharii Hennadii Ivanovych, Sytnyk Borys Tymofiiovych, Husev Ihor Viktorovych, Mamonov Anatolii Vasyliovych, Levochko Borys Stepanovych, Husev Pavlo Viktorovych
Назва патенту російськоюУстройство для измерения параметров инерционных звеньев
Автори російськоюЗагарий Геннадий Иванович, Ситник Борис Тимофеевич, Гусев Игорь Викторович, Мамонов Анатолий Васильевич, Левочко Борис Степанович, Гусев Павел Викторович
МПК / Мітки
МПК: G05B 23/02
Мітки: пристрій, параметрів, інерційних, вимірювання, ланок
Код посилання
<a href="https://ua.patents.su/2-4063-pristrijj-dlya-vimiryuvannya-parametriv-inercijjnikh-lanok.html" target="_blank" rel="follow" title="База патентів України">Пристрій для вимірювання параметрів інерційних ланок</a>
Лічильник електроенергії
Номер патенту: 1742
Опубліковано: 25.10.1994
Автори: Смілянський Ігор Ісаакович, Давидов Анатолій Семенович, Кизилов Володимир Улянович
МПК: G01R 11/00
Мітки: електроенергії, лічильник
Формула / Реферат:
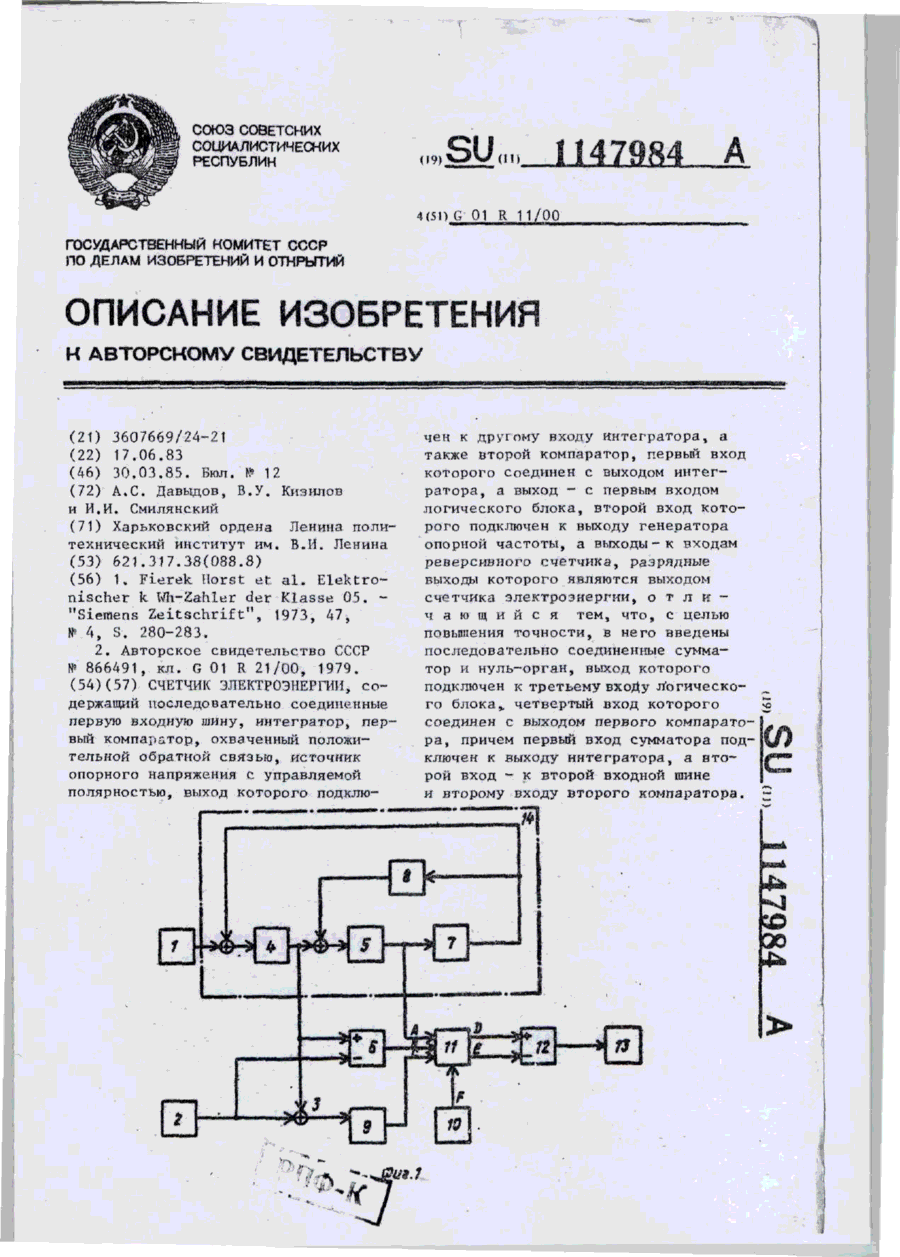
Счетчик электроэнергии, содержащий последовательно соединенные первую входную шину, интегратор, первый компаратор, охваченный положительной обратной связью, источник опорного напряжения с управляемой полярностью, выход которого подключен к другому входу интегратора, а также второй компаратор, первый вход которого соединен с выходом интегратора, а выход — с первым входом логического блока, второй вход которого подключен к выходу генератора...
Пристрій для вимірювання фазового зсуву
Номер патенту: 457
Опубліковано: 30.04.1993
Автори: Свідлер Ігор Давидович, Токовенко Степан Омелянович
МПК: G01R 25/00
Мітки: зсуву, вимірювання, пристрій, фазового
Формула / Реферат:
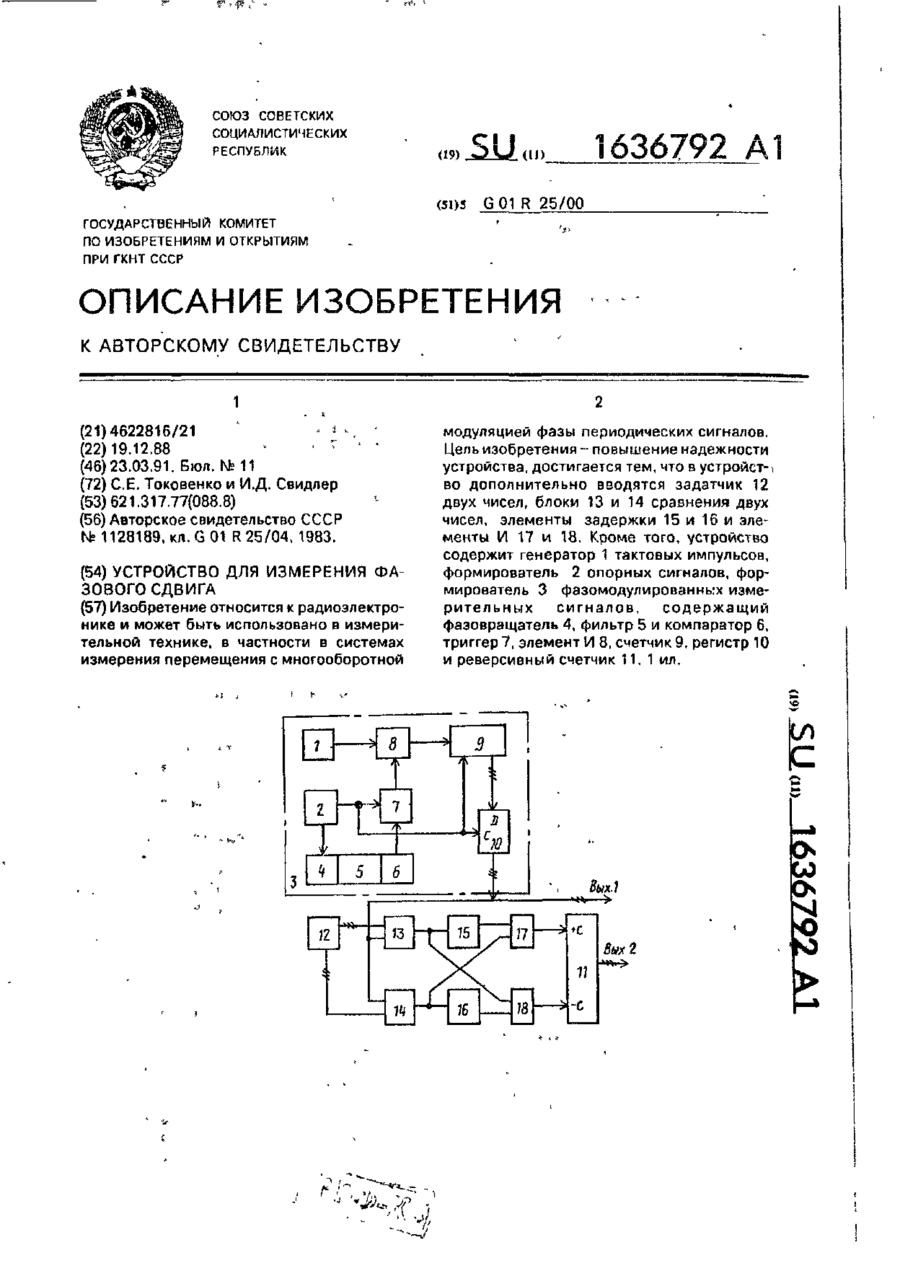
Формула изобретенияУстройство для измерения фазового сдвига, содержащее триггерный фазометр, выход которого является первым выходом устройства и реверсивный счетчик, выход которого является вторым выходом устройства, отличающееся тем, что, с целью повышения надежности устройства, в него дополнительно введены задатчик двух чисел, два блока сравнения двух чисел, два элемента задержки и два элемента И, причем выход триггерного фазометра...
Пристрій для вимірювання переміщень
Номер патенту: 454
Опубліковано: 30.04.1993
Автори: Токовенко Степан Омелянович, Тализін Григорій Володимирович, Виговський Олександр Володимирович, Оснач Віктор Григорович, Вдовиченко Валерій Іванович, Свідлер Ігор Давидович
МПК: H03M 1/50
Мітки: переміщень, пристрій, вимірювання
Формула / Реферат:
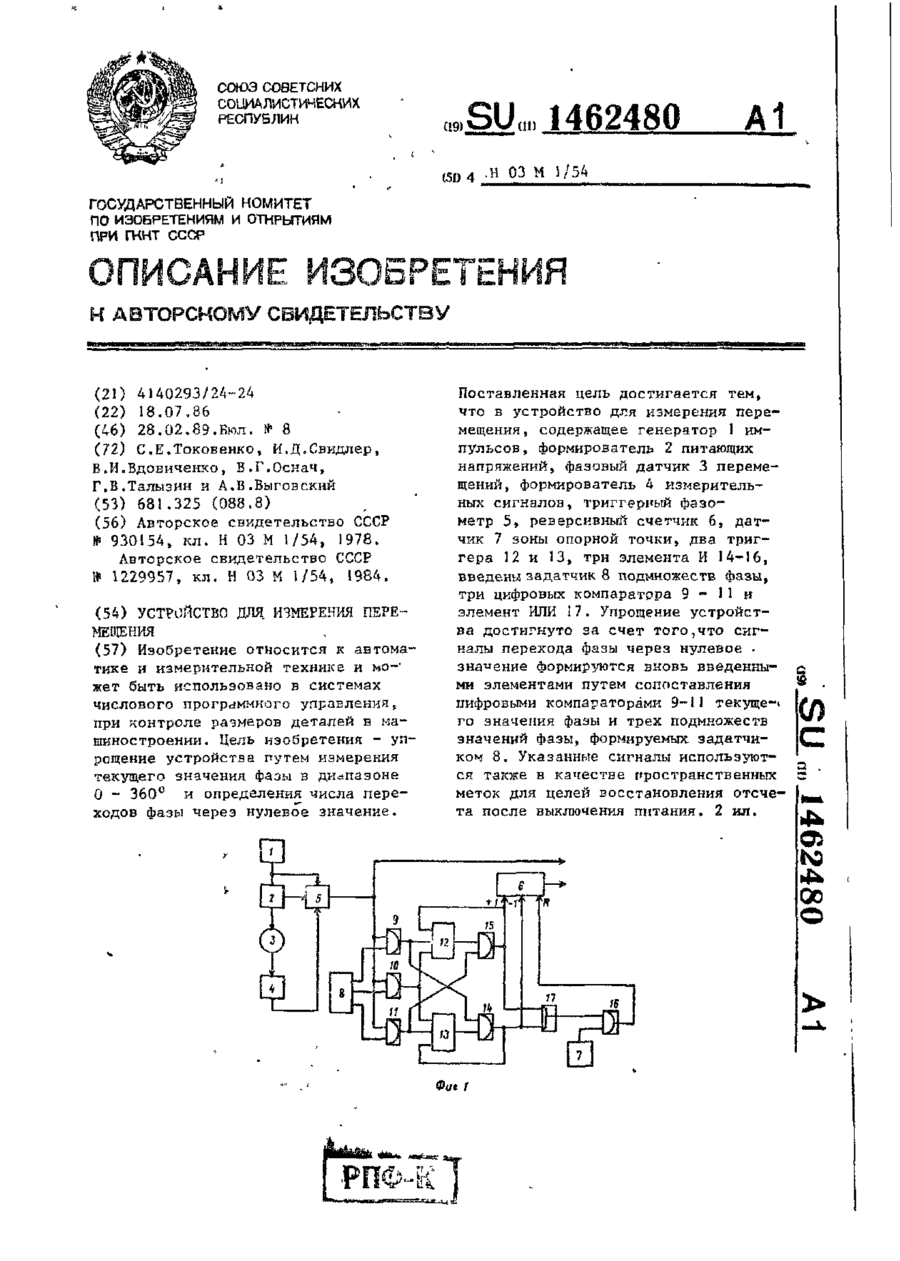
Формула изобретенияУстройство для измерения перемещения, содержащее генератор импульсов, выход которого соединен с входом формирователя питающих напряжений и с первым входом триггерного фазометра, второй вход которого подключен к первому выходу формирователя питающих напряжений, второй выход которого соединен с входом фазового датчика перемещений, выход которого через формирователь измерительных сигналов подключен к третьему входу...
Пристрій для автоматичного визначення часу фільтрування
Номер патенту: 101
Опубліковано: 30.04.1993
Автор: Воробйов Євгеній Ігоревич
МПК: B01D 37/00
Мітки: визначення, пристрій, автоматичного, часу, фільтрування
Формула / Реферат:
Ф о р м у л а и з о б р е т е н и я Устройство для автоматического определения времени фильтрования, содержащее расходомер, установленный на выходном продуктопроводе, интегратор, вход которого связан с выходом расходомера, сумматор, выход которого соединен через нулевое реле с запорным органом на входе фильтра, и блок умножения, первый вход которого связан с выходом блока нелинейности, а выход — с первым входом сумматора, второй вход...
Пристрій для автоматичного вимірювання смуги пропускання чотириполюсника
Номер патенту: 4061
Опубліковано: 27.12.1994
Автори: Коровін Ремір Володимирович, Носов Віталій Вікторович, Завражин Валерій Іванович
МПК: G01R 27/22, G01R 29/00
Мітки: пристрій, смуги, пропускання, вимірювання, автоматичного, чотириполюсника
Формула / Реферат:
1. Устройство для автоматического измерения полосы пропускания четырехполюсника, содержащее генератор качающейся частоты, к выходу которого подключен вход исследуемого четырехполюсника, а также последовательно соединенные детектор, пороговый формирователь импульсов и логический блок, отличающееся тем, что в него введены два колебательных контура, входами подключенные к выходу генератора качающейся частоты, а выходами через сумматор, третьим...
Попередній патент: Полімерна композиція фрикційного призначення
Наступний патент: Електрофен
Випадковий патент: Спосіб корекції метаболічних порушень у жінок з лейоміомою матки на тлі хронічних запальних захворювань органів малого таза