Привод каретки плосков’язальної машини
Номер патенту: 24899
Опубліковано: 06.10.1998
Автори: Піпа Борис Федорович, Хомяк Олег Миколайович, Яковлев Юрій Олександрович
Формула / Реферат
Привод каретки плосковязальной машины, содержащий электродвигатель, ременную передачу, зубчатую передачу, кривошипно-ползунный механизм, включающий кривошип с пальцем, шатун и каретку, счетный механизм и тормозное устройство, отличающийся тем, что зубчатая передача выполнена в виде ведущего и ведомого зубчатых колес некруглой формы, имеющих одинаковые длины начальных центроид и передаточное число i изменяющееся за цикл вращения от шатуна, r - радиус кривошипа, причем каждое из колес имеет ось симметрии, а палец кривошипа установлен на ведомом зубчатом колесе.
Текст
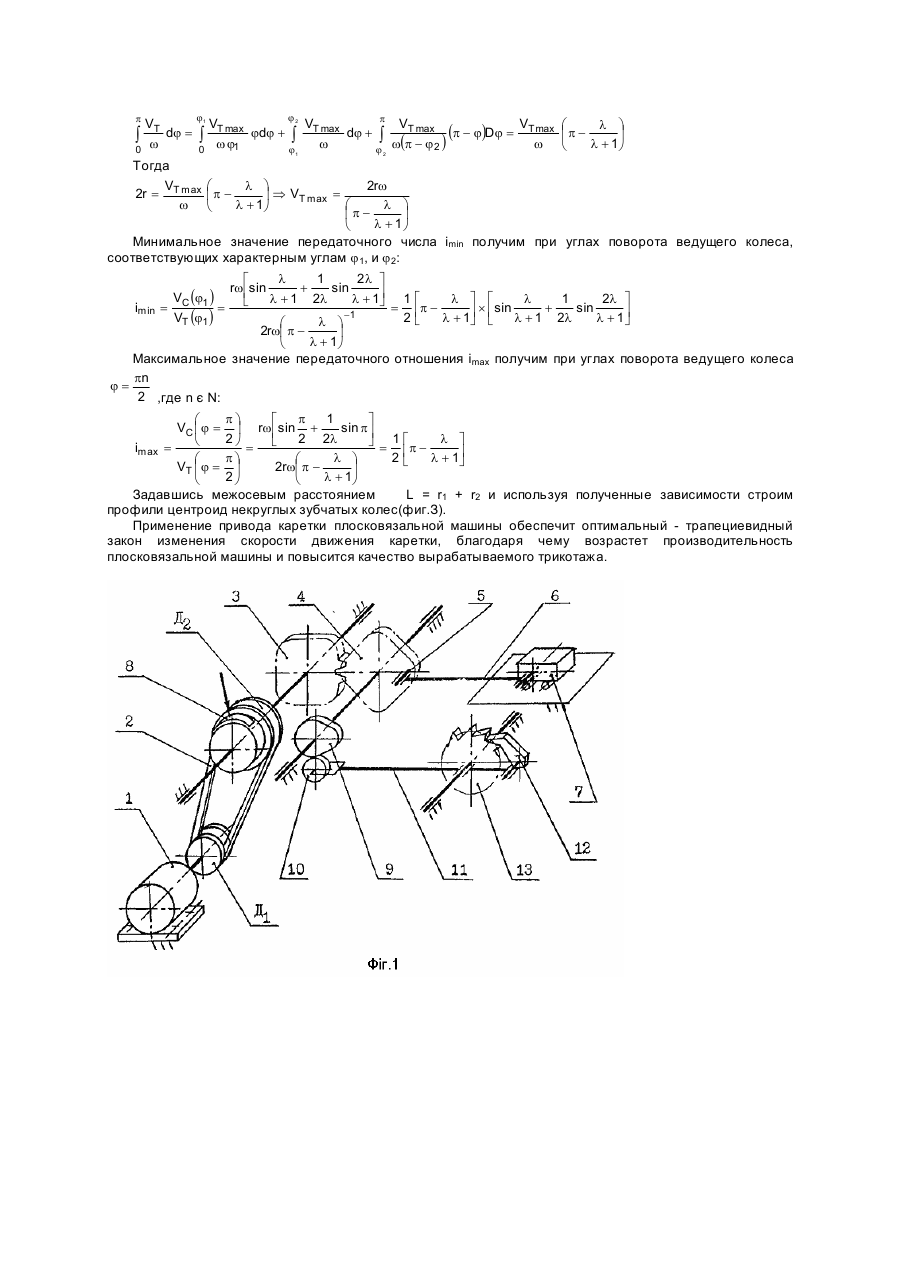
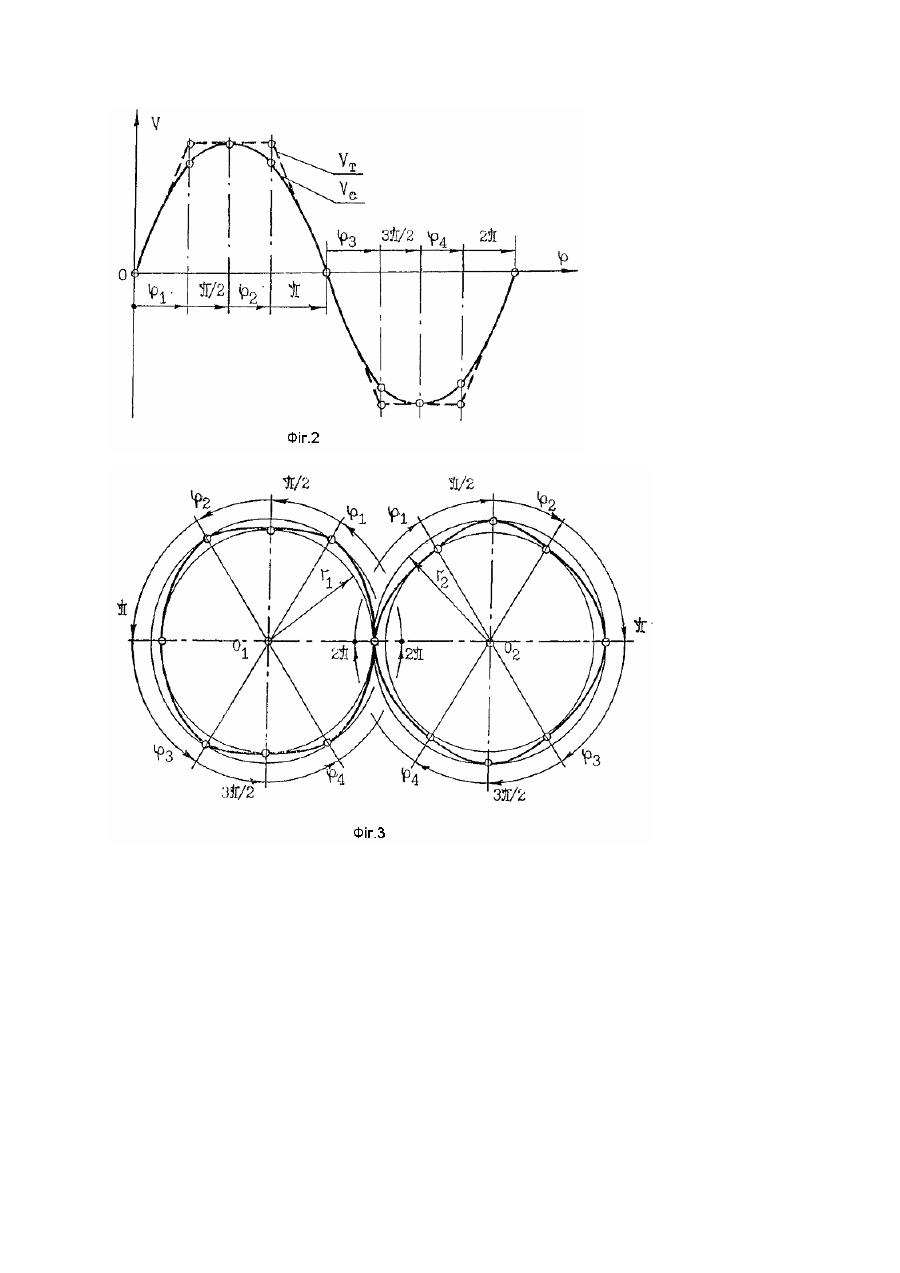
Изобретение относится к области трикотажного машиностроения, в частности, к приводам каретки плосковязальных машин. Известны приводы каретки плосковязальной машины, содержащие каретку, через промежуточный ползун связанную с цепной передачей, от которой получает возвратно - поступательное движение [Колесникова Е. Н. и др. Вязальное оборудование трикотажных фабрик, М.: Легпромбытиздат, 1985. С. 163 - 165, рис.2. 6; С. 179 - 181, рис.2. 14]. Существенным признаком этих механизмов является постоянство скорости движения каретки на участках рабочего хода, что положительно влияет на формирование равномерной петельной структуры, динамические нагрузки в петлеобразующих органах, натяжение перерабатываемых нитей, а также при равенстве максимальных линейных скоростей движения каретки позволяет получать более высокую производительность, по сравнению с механизмами, создающими синусоидальный закон движения. Таким механизмам присущи ограниченность скорости: перемещения каретки и непостоянство выбегов каретки за крайние иглы, за счет проскальзывания в муфтах, увеличивающееся с увеличением скорости вязальной каретки. Известны также приводы каретки плосковязальной машины, содержащие каретку, приводимую в действие посредством ленточных зажимов от одного из двух клиновых ремней, движущихся в противоположных направлениях [Патент Великобритании №1121733,ИПК7 D01С (МПК Д04В), от 31.07.68]. Такая конструкция привода, как и вышеприведенный цепной механизм с электромагнитной муфтой, обеспечивает постоянную скорость движения каретки на участках рабочего хода. Ограничивает применение таких механизмов низкая надежность и малые скорости движения каретки. Известен также привод каретки плосковязальной машины, содержащий электродвигатель, ременную передачу, зубчатую передачу, кривошипно - ползунный механизм, включающий кривошип с пальцем, шатун и каретку, счетный механизм и тормозное устройство [Присяжнюк П. А. Наладка и эксплуатация плосковязальных трикотажных машин, К.: Техніка, 1983. С. 65 - 67, рис.30]. Такая конструкция привода является более простой, надежной в работе, позволяет получать скорость движения каретки более высокую по сравнению с цепными и ременными приводами. Кроме того, кривошипно - ползунный механизм обеспечивает приводу устойчивость в динамическом отношении. Однако, приводу присуща синусоидальная форма закона изменения скорости движения каретки. Максимальная линейная скорость каретки, соответствующая экстремуму синусоиде(достигается в середине хода каретки) и определяющая максимальные нагрузки на перерабатываемые нити и динамические усилия в петлеобразующих органах, ограничивает таким образом повышение производительности за счет увеличения скоростных режимов. Кроме того, непостоянство скорости движения каретки на участках рабочего хода отрицательно сказывается на равномерности петельной структуры вырабатываемого трикотажа и, следовательно, качестве производимых изделий. В основу изобретения положена задача создания привода каретки плосковязальной машины, в котором новая форма профилей зубчатых колес обеспечит оптимальный - трапециевидный закон изменения скорости движения каретки, благодаря чему возрастет производительность плосковязальной машины и. повысится качество вырабатываемого трикотажа. Указанная задача решена тем, что в приводе, содержащем электродвигатель, ременную передачу, зубчатую передачу, кривошипно - ползунный механизм, включающий кривошип с пальцем, шатун м каретку, счетный механизм и тормозное устройство, согласно изобретению, зубчатая передача выполнена в виде ведущего и ведомого зубчатых колес некруглой формы, имеющих одинаковые длины начальных центроид и. передаточное число L изменяющееся за цикл вращения от l 1é 1 2l ù l ù é ´ sin + sin імін = êp l + 1ú до 2ë l + 1ú ê l = 1 2 û û ë é l ù êp - l + 1 ú û ë L l= r , L - длина шатуна, r - радиус кривошипа, причем каждое из колес имеет ось симметрии, а где палец кривошипа установлен на ведомом зубчатом колесе. Такое техническое решение - введение в привод с кривошипно - ползунным механизмом пары некруглых зубчатых колес вышеприведенной формы, позволяет преобразовать синусоидальньй закон изменения скорости движения каретки в оптимальный - трапециевидный, с максимальной линейной скоростью цикла постоянной на участках рабочего хода. Это, в свою очередь, обеспечивает увеличение средней скорости цикла и пропорционально производительности, по сравнению с механизмом, создающим синусоидальный закон движения каретки, при равенстве максимальных линейных скоростей в рассматриваемых законах движения каретки. Кроме того, постоянство скорости движения каретки на участках петлеобразования положительно скажется на равномерности петельной структуры вырабатываемого трикотажа и, следовательно, качестве производимых изделий. На фиг.1 изображена кинематическая схема предлагаемого привода каретки плосковязальной машины, на фиг.2 даны диаграммы зависимостей линейных скоростей VC при. синусоидальном и VТ при оптимальном - трапециевидном законах движения каретки от угла φ поворота кривошипа, на фиг.З показан пример построения профилей центроид ведущего и ведомого некруглых зубчатых колес. Предлагаемый привод(фиг.1) содержит электродвигатель 1 ременную передачу 2, зубчатые колеса 3 и 4, на последнем из которых имеется палец 5 кривошипа, шарнирно, через шатун 6, связанный с кареткой імах = 1 2 7. Остановка машины осуществляется тормозным устройством 8, а эксцентрик 9, через ролик 10, рычаг 11, собачку 12, связан с храповиком 13 счетного устройства. Привод работает следующим образом: движение от электродвигателя 1 сообщается ведущему шкиву Д1 ременной передачи 2, ведомый шкив Д2 которой посажен на одном валу с ведущим некруглым зубчатым колесом 3. Находящееся в зацеплении с последним зубчатое колесо 4, через палец 5, шатун 6 сообщает возвратно - поступательное движение каретке 7. Для останова машины служит тормоз 8. Расположенный на одном валу с ведомым зубчатым колесом 4 эксцентрик 9, через ролик 10, рычаг 11, собачку 12, создает прерывистое вращательное движение храповому колесу 13 счетного механизма на каждый полный оборот кривошипа. Для проектирования профилей центроид некруглых зубчатых колес необходимо знать зависимость передаточного отношения L от угла φ поворота ведущего колеса: r v i( j) = 2 = c r1 v т где r1.2 - радиусы профилей центроид соответственно ведущего и ведомого зубчатых колес. Скорость VC и ускорение aC каретки при синусоидальном законе движения [Баранов Г, Г. Курс теории механизмов и машин. - М.: Машиностроение, 1975г., С. 82] определяются выражениями: 1 ù é v c = rwêsin j + sin 2jú 2l û ë ù é 1 a c = r w2 ê cos j + cos 2jú l û ë где w - частота вращения ведущего колеса. Скорость VТ каретки как видно(фиг.2) из диаграммы(учитывая симметрию полуциклов законов движения будем рассматривать участок j С[0; p]), имеет следующую зависимость: ì Vт max × j, при j є [0; j1 ] ï ï j1 ï VТ = í Vт max , при j є [j1; j 2 ] ï ï Vт max × ( p - j), при j є [j ; p] 2 ï p - j2 î где VТмах – максимальная скорость каретки при оптимальном законе движения, соответствующая участкам рабочего хода; j1,2 – углы поворота ведущего колеса, соответствующие характерным точкам диаграммы VТ(j). Характерные углы j1 и j2 связаны зависимостью: j1 = p - j2 Для определения угла j1 заметим, что V j1 = wt 1 = w C max ar max где t1 – время в цикле движения каретки, соответствующее характерному углу j1; VCmax – максимальная скорость каретки при синусоидальном законе движения; аТмах - максимальное ускорение каретки, соответствующее участку разгона, при оптимальном законе движения. Примем аТмах = аСмах = аТ([0; j1]) = ½аТ([j2; p])| Из(1) и (2) находим: ù æ l + 1ö é 1 a C max = a C (j = 0 ) = rw2 êcos 0 + cos 0 ú = rw2 ç ÷ l û è l ø ë ù é p æ pö 1 × sin pú = rw VC max = VC ç j - ÷ = rwêsin + 2ø 2 2l û ë è Для угла j1 тогда получим: l rw = j1 = w æ l + 1ö l + 1 rw2 ç ÷ è l ø Полагая w = conSt и участки хода каретки равными npи синусоидальном и оптимальном законах движения, а также учитывая V = dS/dt, dt = dp/w , где S - перемещение каретки, имеем: p S=ò 0 p p VC V dj = ò Т dj w 0 w VC rw é 1 ùp ò w dj = w ê- cos j + 4l (- cos 2j )ú = 2r û0 ë 0 p VТ dj = 0 w ò j1 ò 0 j p 2 VТ max V VТ max (p - j)Dj = VТ max æ p - l ö jdj + ò Т max dj + ò ç ÷ w j1 w w(p - j 2 ) w è l + 1ø j1 j2 Тогда V 2r = Т max w 2rw æ l ö çp ÷ Þ VТ max = æ l ö l + 1ø è çp ÷ l + 1ø è Минимальное значение передаточного числа іmin получим при углах поворота ведущего колеса, соответствующих характерным углам j1, и j2: 1 2l ù l é rwêsin sin + V (j ) 1 2l ù l + 1 2l l + 1ú 1 é l ù é l û = іmin = C 1 = ë sin p´ sin + -1 VТ (j1 ) 2ê l + 1ú ê l + 1 2l l + 1ú û ë û ë l ö æ 2rwç p ÷ l + 1ø è Максимальное значение передаточного отношения imax получим при углах поворота ведущего колеса pn j= 2 ,где n є N: 1 pö p ù é æ sin p ú VC ç j = ÷ rwê sin + 2 2l 2ø û = 1 ép - l ù ë è imax = = l ö l + 1ú 2ê pö æ æ ë û VТ ç j = ÷ 2rwç p ÷ l + 1ø 2ø è è Задавшись межосевым расстоянием L = r1 + r2 и используя полученные зависимости строим профили центроид некруглых зубчатых колес(фиг.З). Применение привода каретки плосковязальной машины обеспечит оптимальный - трапециевидный закон изменения скорости движения каретки, благодаря чему возрастет производительность плосковязальной машины и повысится качество вырабатываемого трикотажа.
ДивитисяДодаткова інформація
Назва патенту англійськоюDrive of the carriage of flat-knitting machine
Автори англійськоюYakovlev Yurii Oleksandrovych, Khomiak Oleh Mykolaiovych, Pypa Borys Fedorovych
Назва патенту російськоюПривод каретки плосковязальной машины
Автори російськоюЯковлев Юрий Александрович, Хомяк Олег Николаевич, Пипа Борис Федорович
МПК / Мітки
МПК: D04B 15/96
Мітки: каретки, машини, плосков`язальної, привод
Код посилання
<a href="https://ua.patents.su/4-24899-privod-karetki-ploskovyazalno-mashini.html" target="_blank" rel="follow" title="База патентів України">Привод каретки плосков’язальної машини</a>
Привод каретки плосков’язальної машини
Номер патенту: 24506
Опубліковано: 21.07.1998
Автори: Піпа Борис Федорович, Хомяк Володимир Антонович, Яковлев Юрій Олександрович
МПК: D04B 15/96
Мітки: привод, каретки, плосков`язальної, машини
Формула / Реферат:
Привод каретки плосковязальной машины, включающий шарнирно-рычажный механизм, содержащий кривошип, шатун, коромысло, кулису, кулисный камень и ползун каретки, программное устройство для управления величиной хода каретки и положением осевой линии хода каретки, представляющее собой два кулачка, содержащие по периметрам сменные накладки и кинематически связанные с ползуном каретки посредством шарнирно-рычажного механизма, счетное устройство в...
Привод каретки плосков’язальної машини
Номер патенту: 24505
Опубліковано: 21.07.1998
Автори: Піпа Борис Федорович, Яковлев Юрій Олександрович, Хомяк Володимир Антонович
МПК: D04B 15/96
Мітки: привод, плосков`язальної, каретки, машини
Формула / Реферат:
Привод каретки плосковязальной машины, включающий восьмизвенный рычажный механизм, состоящий из кривошипа, шатуна, коромысла, кулисы, кулисного камня, тяги и ползуна каретки, программное устройство для управления величиной хода каретки и положением осевой линии хода каретки, представляющее собой два кулачка, содержащие по периметрам сменные накладки и кинематически связанные с ползуном каретки посредством рычажного механизма, счетное...
Привод каретки плосков’язальної машини
Номер патенту: 6448
Опубліковано: 29.12.1994
Автори: Яковлев Юрій Олександрович, Хомяк Олег Миколайович, Щербань Володимир Юрійович, Кот Андрій Миколайович, Кокшаров Борис Миколайович, Березін Леонід Миколайович
МПК: D04B 15/96
Мітки: привод, каретки, машини, плосков`язальної
Формула / Реферат:
(57) Привод каретки плосковязальной машины, содержащий вязальную каретку, установленную с возможностью возвратно-поступательного перемещения по направляющим и связанную со средством ее перемещения, и демпфирующий элемент, отличающийся тем, что вязальная каретка связана со средством перемещения посредством демпфирующего элемента.
Привод каретки плосков’язальної машини
Номер патенту: 24926
Опубліковано: 06.10.1998
Автори: Яковлев Юрій Олександрович, Хомяк Олег Миколайович, Піпа Борис Федорович
МПК: D04B 15/96
Мітки: привод, машини, каретки, плосков`язальної
Формула / Реферат:
Привод каретки плосков'язальної машини, включаючий шарнірно-важільний механізм, що містить кривошип, шатун, коромисло, кулісу, кулісний камінь і повзун каретки, програмний пристрій для керування величиною ходу каретки і положенням осьової лінії ходу каретки, являючий собою два кулачки, що містять по периметрах змінні накладки і кінематично зв'язані з повзуном каретки через шарнірно-важільний механізм, лічильний пристрій у вигляді храпового...
Привод каретки плосков’язальної машини
Номер патенту: 24930
Опубліковано: 06.10.1998
Автори: Хомяк Олег Миколайович, Яковлев Юрій Олександрович, Піпа Борис Федорович
МПК: D04B 15/96
Мітки: привод, плосков`язальної, каретки, машини
Формула / Реферат:
Привод каретки плосков'язальної машини, включаючий шарнірно-важільний механізм, що містить кривошип, шатун, коромисло, кулісу, кулісний камінь і повзун каретки, програмний пристрій для керування величиною ходу каретки і положенням осьової лінії ходу каретки, являючий собою два кулачки, що містять по периметрах змінні накладки і кінематично зв'язані з повзуном каретки через шарнірно-важільний механізм, лічильний пристрій у вигляді храпового...
Попередній патент: Спосіб підвищення проникності гірських порід на місці залягання та пристрій для його здійснення
Наступний патент: Морозиво “солодок”
Випадковий патент: Контакт в інтегральних пристроях зі структурами "кремній-на-ізоляторі"