Електропривід стрілкового переводу

Формула / Реферат
1. Електропривід стрілкового переводу, що включає електродвигун, передатний пристрій із фрикційною муфтою, стрілковий перевід з гостряками рейок і електронний блок автоматичного керування електродвигуном, який відрізняється тим, що він додатково забезпечений фільтром гасіння паразитичних частот, як електродвигун використаний асинхронний електродвигун, а електронний блок автоматичного керування електродвигуном виконаний у вигляді частотного перетворювача на транзисторах, переважно IGBT транзисторах, що містить мікропроцесорний блок програмного керування й контролю, при цьому вхід частотного перетворювача підключений до лінії живлення, а вихід - через фільтр гасіння паразитичних частот, з'єднаний з асинхронним електродвигуном.
2. Електропривід стрілкового переводу за п. 1, який відрізняється тим, що електронний блок автоматичного керування електродвигуном виконаний у вигляді автономного інвертора напруги, що розташований між лінією живлення і асинхронним електродвигуном через фільтр гасіння паразитних частот.
Текст
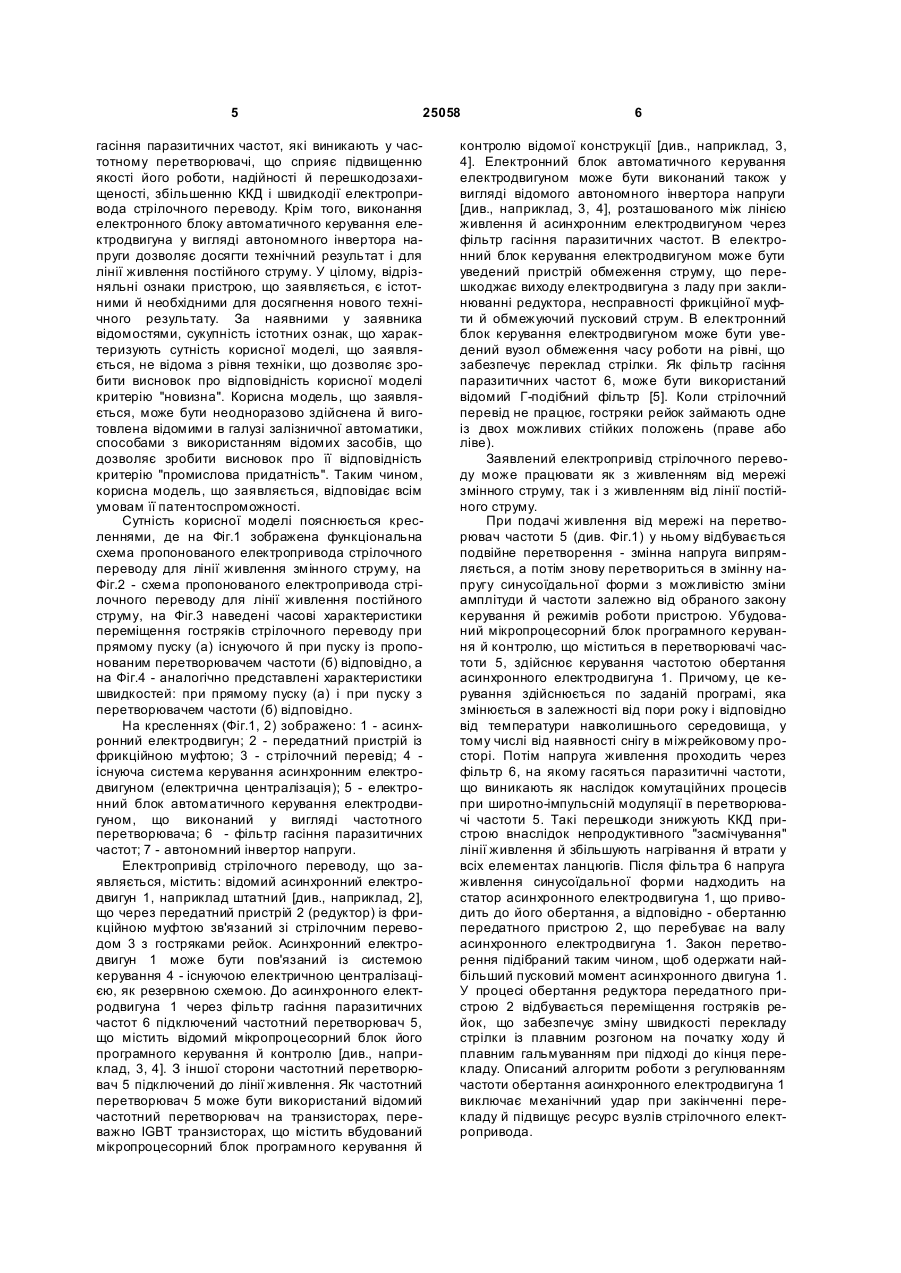
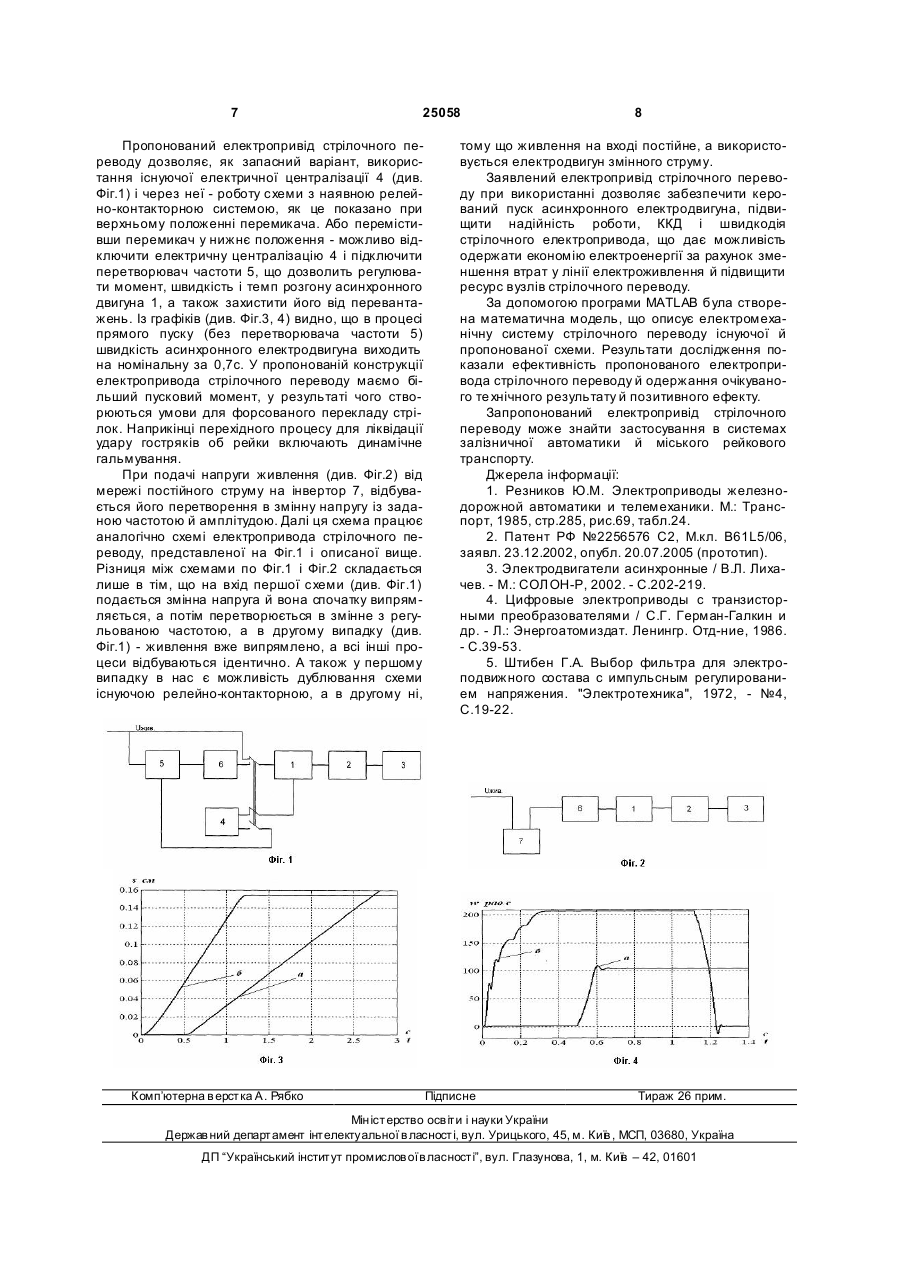
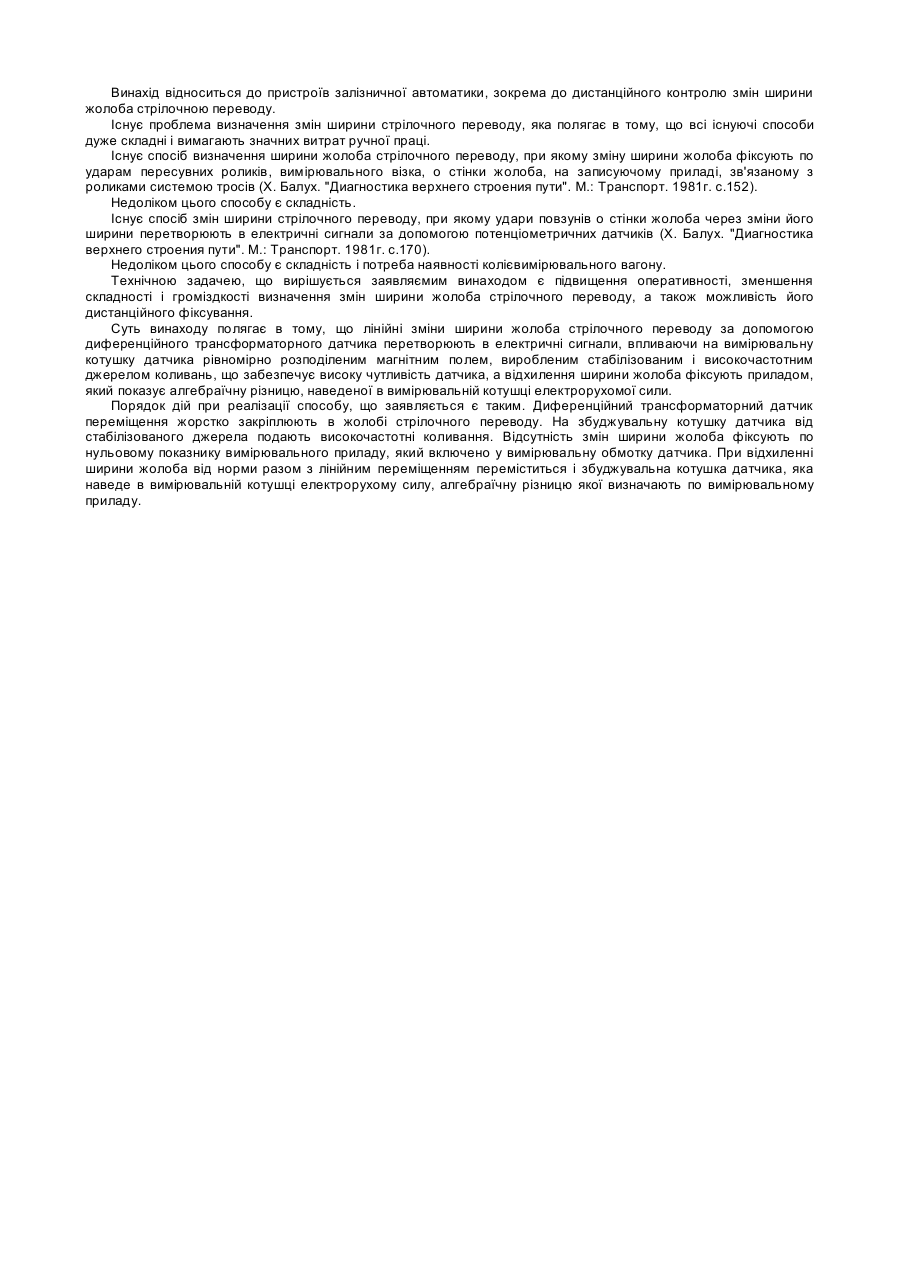
1. Електропривід стрілкового переводу, що включає електродвигун, передатний пристрій із фрикційною муфтою, стрілковий перевід з гостряками рейок і електронний блок автоматичного керування електродвигуном, який відрізняється тим, що він додатково забезпечений фільтром гасіння паразитичних частот, як електродвигун використаний асинхронний електродвигун, а електронний блок автоматичного керування електро 3 25058 - стан електродвигуна при перекладі стрілки не контролюється, а наявний захист являє собою фрикційну муфту, що захи щає механічну частину й лише побічно здійснює захист електричної частини; - при використанні відомого стрілочного електропривода також є підвищена витрата електроенергії у зв'язку із тривалістю роботи електродвигуна й використання методу форсованого пуску із дворазовим перевищенням номінальної напруги. Найбільш близьким по технічній сутності до пропонованого є відомий стрілочний електропривід, що містить електродвигун, редуктор із фрикційною муфтою, стрілочний перевід з гостряками рейок й автоперемикачем, корпус. Він постачений електронним блоком автоматичного керування електродвигуном, що забезпечує зміну швидкості перекладу стрілки із плавним розгоном на початку ходу й плавним гальмуванням при підході до кінця перекладу за рахунок регулювання частоти обертання електродвигуна, виконаний безконтактним керованим з постійними магнітами на роторі спеціальної конструкції магнітоелектричного типу, який живиться від мережі трифазного струму. Електронний блок автоматичного керування електродвигуном виконаний у вигляді частотного перетворювача на тиристорах. Електромеханічна частина двигуна має ротор з постійними магнітами й статор з намотаними фазними обмотками. Крім того, блок керування безконтактним керованим електродвигуном містить пристрій обмеження струму; вузол обмеження часу роботи на рівні, що забезпечує переклад стрілки [2]. Загальними ознаками відомого й пристрою, що заявляється, є електродвигун, передатний пристрій із фрикційною муфтою, стрілочний перевід з гостряками рейок, і блок автоматичного керування електродвигуном. До недоліків відомого стрілочного електропривода варто віднести його складність внаслідок використання електродвигуна спеціальної конструкції - електродвигуна з постійними магнітами на роторі. Виконання електронного блоку автоматичного керування електродвигуном у вигляді частотного перетворювача на тиристорах приводить до зниження якості перехідних процесів. Безпосереднє з'єднання частотного перетворювача на тиристорах з електродвигуном приводить до підвищення втрат на електродвигуні і його додатковому нагріванні за рахунок присутності високочастотних гармонік. У цілому це веде до зниження надійності, відсутності перешкодозахищеності, втратам у лінії електроживлення, зниженню ККД і швидкодії електропривода стрілочного переводу, і його подорожчанню. В основу корисної моделі поставлене завдання вдосконалення електропривода стрілочного переводу, у якому за рахунок введення нових пристроїв і зв'язків, забезпечується підвищення надійності й перешкодозахищеності, збільшення ККД і швидкодії електропривода стрілочного переводу, що дозволяє досягти значної економії електроенергії за рахунок зменшення втрат у лінії живлення, підвищення продуктивності електропривода стрі 4 лочного переводу, здешевлення його вартості й збільшення терміну служби вузлів. Поставлене завдання досягається тим, що у електроприводі стрілочного переводу, що включає електродвигун, передатний пристрій із фрикційною муфтою, стрілочний перевід з гостряками рейок, і електронний блок автоматичного керування електродвигуном, відповідно до корисної моделі, він додатково забезпечений фільтром гасіння паразитичних частот, як електродвигун використаний асинхронний електродвигун, а електронний блок автоматичного керування електродвигуном виконаний у вигляді частотного перетворювача на транзисторах, переважно IGBT транзисторах, що містить мікропроцесорний блок програмного керування й контролю, при цьому вхід частотного перетворювача підключений до лінії живлення, а вихід - через фільтр гасіння паразитичних частот з'єднаний з асинхронним електродвигуном. Крім того, електронний блок автоматичного керування електродвигуном виконаний у вигляді автономного інвертора напруги, що розташований між лінією живлення й асинхронним електродвигуном через фільтр гасіння паразитичних частот. У результаті використання корисної моделі, що заявляється, забезпечується одержання технічного результату, який полягає в підвищенні надійності й перешкодозахищеності, збільшенні ККД і швидкодії електропривода стрілочного переводу. Застосування асинхронного електродвигуна замість використовуваного в прототипі електродвигуна спеціальної конструкції спрощує в цілому конструкцію електропривода стрілочного переводу внаслідок можливості використання штатного асинхронного електродвигуна, що зменшує вартість електропривода стрілочного переводу й збільшує його надійність. Виконання електронного блоку автоматичного управління електродвигуна у вигляді частотного перетворювача на транзисторах, переважно IGBT транзисторах, що містить мікропроцесорний блок програмного керування й контролю, вхід якого підключений до лінії живлення, а вихід - через фільтр гасіння паразитичних частот з'єднаний з асинхронним електродвигуном, радикально змінює якісні й часові характеристики роботи електропривода, покращуючи їх. Це дає можливість використовувати асинхронний електропривід із частотним керуванням і електродинамічним гальмуванням, у тому числі його пуск і плавне завершення переміщення (зміна швидкості перекладу) стрілки по заданому алгоритму, а також застосувати захист асинхронного електродвигуна по струму. Здійснення пуску асинхронного електродвигуна через частотний перетворювач із мікропроцесорним керуванням дозволяє запускати його з номінальною напругою й зниженою частотою, а потім при досягненні необхідного значення моменту - підвищувати часто ту напруги живлення, і форсовано переходити на такий режим роботи електродвигуна, при якому без перевантажень для електричної й механічної частини системи, переміщати стрілочний перевід швидше в кілька разів з можливістю гальмування наприкінці процесу переміщення стрілок. Наявність фільтра в схемі електропривода стрілочного переводу забезпечує 5 25058 гасіння паразитичних частот, які виникають у частотному перетворювачі, що сприяє підвищенню якості його роботи, надійності й перешкодозахищеності, збільшенню ККД і швидкодії електропривода стрілочного переводу. Крім того, виконання електронного блоку автоматичного керування електродвигуна у вигляді автономного інвертора напруги дозволяє досягти технічний результат і для лінії живлення постійного струму. У цілому, відрізняльні ознаки пристрою, що заявляється, є істотними й необхідними для досягнення нового технічного результату. За наявними у заявника відомостями, сукупність істотних ознак, що характеризують сутність корисної моделі, що заявляється, не відома з рівня техніки, що дозволяє зробити висновок про відповідність корисної моделі критерію "новизна". Корисна модель, що заявляється, може бути неодноразово здійснена й виготовлена відомими в галузі залізничної автоматики, способами з використанням відомих засобів, що дозволяє зробити висновок про її відповідність критерію "промислова придатність". Таким чином, корисна модель, що заявляється, відповідає всім умовам її патентоспроможності. Сутність корисної моделі пояснюється кресленнями, де на Фіг.1 зображена функціональна схема пропонованого електропривода стрілочного переводу для лінії живлення змінного струму, на Фіг.2 - схема пропонованого електропривода стрілочного переводу для лінії живлення постійного струму, на Фіг.3 наведені часові характеристики переміщення гостряків стрілочного переводу при прямому пуску (а) існуючого й при пуску із пропонованим перетворювачем частоти (б) відповідно, а на Фіг.4 - аналогічно представлені характеристики швидкостей: при прямому пуску (а) і при пуску з перетворювачем частоти (б) відповідно. На кресленнях (Фіг.1, 2) зображено: 1 - асинхронний електродвигун; 2 - передатний пристрій із фрикційною муфтою; 3 - стрілочний перевід; 4 існуюча система керування асинхронним електродвигуном (електрична централізація); 5 - електронний блок автоматичного керування електродвигуном, що виконаний у вигляді частотного перетворювача; 6 - фільтр гасіння паразитичних частот; 7 - автономний інвертор напруги. Електропривід стрілочного переводу, що заявляється, містить: відомий асинхронний електродвигун 1, наприклад штатний [див., наприклад, 2], що через передатний пристрій 2 (редуктор) із фрикційною муфтою зв'язаний зі стрілочним переводом 3 з гостряками рейок. Асинхронний електродвигун 1 може бути пов'язаний із системою керування 4 - існуючою електричною централізацією, як резервною схемою. До асинхронного електродвигуна 1 через фільтр гасіння паразитичних частот 6 підключений частотний перетворювач 5, що містить відомий мікропроцесорний блок його програмного керування й контролю [див., наприклад, 3, 4]. З іншої сторони частотний перетворювач 5 підключений до лінії живлення. Як частотний перетворювач 5 може бути використаний відомий частотний перетворювач на транзисторах, переважно IGBT транзисторах, що містить вбудований мікропроцесорний блок програмного керування й 6 контролю відомої конструкції [див., наприклад, 3, 4]. Електронний блок автоматичного керування електродвигуном може бути виконаний також у вигляді відомого автономного інвертора напруги [див., наприклад, 3, 4], розташованого між лінією живлення й асинхронним електродвигуном через фільтр гасіння паразитичних частот. В електронний блок керування електродвигуном може бути уведений пристрій обмеження струму, що перешкоджає виходу електродвигуна з ладу при заклинюванні редуктора, несправності фрикційної муфти й обмежуючий пусковий струм. В електронний блок керування електродвигуном може бути уведений вузол обмеження часу роботи на рівні, що забезпечує переклад стрілки. Як фільтр гасіння паразитичних частот 6, може бути використаний відомий Г-подібний фільтр [5]. Коли стрілочний перевід не працює, гостряки рейок займають одне із двох можливих стійких положень (праве або ліве). Заявлений електропривід стрілочного переводу може працювати як з живленням від мережі змінного струму, так і з живленням від лінії постійного струму. При подачі живлення від мережі на перетворювач частоти 5 (див. Фіг.1) у ньому відбувається подвійне перетворення - змінна напруга випрямляється, а потім знову перетвориться в змінну напругу синусоїдальної форми з можливістю зміни амплітуди й частоти залежно від обраного закону керування й режимів роботи пристрою. Убудований мікропроцесорний блок програмного керування й контролю, що міститься в перетворювачі частоти 5, здійснює керування частотою обертання асинхронного електродвигуна 1. Причому, це керування здійснюється по заданій програмі, яка змінюється в залежності від пори року і відповідно від температури навколишнього середовища, у тому числі від наявності снігу в міжрейковому просторі. Потім напруга живлення проходить через фільтр 6, на якому гасяться паразитичні частоти, що виникають як наслідок комутаційних процесів при широтно-імпульсній модуляції в перетворювачі частоти 5. Такі перешкоди знижують ККД пристрою внаслідок непродуктивного "засмічування" лінії живлення й збільшують нагрівання й втрати у всіх елементах ланцюгів. Після фільтра 6 напруга живлення синусоїдальної форми надходить на статор асинхронного електродвигуна 1, що приводить до його обертання, а відповідно - обертанню передатного пристрою 2, що перебуває на валу асинхронного електродвигуна 1. Закон перетворення підібраний таким чином, щоб одержати найбільший пусковий момент асинхронного двигуна 1. У процесі обертання редуктора передатного пристрою 2 відбувається переміщення гостряків рейок, що забезпечує зміну швидкості перекладу стрілки із плавним розгоном на початку ходу й плавним гальмуванням при підході до кінця перекладу. Описаний алгоритм роботи з регулюванням частоти обертання асинхронного електродвигуна 1 виключає механічний удар при закінченні перекладу й підвищує ресурс вузлів стрілочного електропривода. 7 25058 Пропонований електропривід стрілочного переводу дозволяє, як запасний варіант, використання існуючої електричної централізації 4 (див. Фіг.1) і через неї - роботу схеми з наявною релейно-контакторною системою, як це показано при верхньому положенні перемикача. Або перемістивши перемикач у нижнє положення - можливо відключити електричну централізацію 4 і підключити перетворювач частоти 5, що дозволить регулювати момент, швидкість і темп розгону асинхронного двигуна 1, а також захистити його від перевантажень. Із графіків (див. Фіг.3, 4) видно, що в процесі прямого пуску (без перетворювача частоти 5) швидкість асинхронного електродвигуна виходить на номінальну за 0,7с. У пропонованій конструкції електропривода стрілочного переводу маємо більший пусковий момент, у результаті чого створюються умови для форсованого перекладу стрілок. Наприкінці перехідного процесу для ліквідації удару гостряків об рейки включають динамічне гальмування. При подачі напруги живлення (див. Фіг.2) від мережі постійного струму на інвертор 7, відбувається його перетворення в змінну напругу із заданою частотою й амплітудою. Далі ця схема працює аналогічно схемі електропривода стрілочного переводу, представленої на Фіг.1 і описаної вище. Різниця між схемами по Фіг.1 і Фіг.2 складається лише в тім, що на вхід першої схеми (див. Фіг.1) подається змінна напруга й вона спочатку випрямляється, а потім перетворюється в змінне з регульованою частотою, а в другому випадку (див. Фіг.1) - живлення вже випрямлено, а всі інші процеси відбуваються ідентично. А також у першому випадку в нас є можливість дублювання схеми існуючою релейно-контакторною, а в другому ні, Комп’ютерна в ерстка А. Рябко 8 тому що живлення на вході постійне, а використовується електродвигун змінного струму. Заявлений електропривід стрілочного переводу при використанні дозволяє забезпечити керований пуск асинхронного електродвигуна, підвищити надійність роботи, ККД і швидкодія стрілочного електропривода, що дає можливість одержати економію електроенергії за рахунок зменшення втрат у лінії електроживлення й підвищити ресурс вузлів стрілочного переводу. За допомогою програми MATLAB була створена математична модель, що описує електромеханічну систему стрілочного переводу існуючої й пропонованої схеми. Результати дослідження показали ефективність пропонованого електропривода стрілочного переводу й одержання очікуваного те хнічного результату й позитивного ефекту. Запропонований електропривід стрілочного переводу може знайти застосування в системах залізничної автоматики й міського рейкового транспорту. Джерела інформації: 1. Резников Ю.М. Электроприводы железнодорожной автоматики и телемеханики. М.: Транспорт, 1985, стр.285, рис.69, табл.24. 2. Патент РФ №2256576 С2, М.кл. В61L5/06, заявл. 23.12.2002, опубл. 20.07.2005 (прототип). 3. Электродвигатели асинхронные / В.Л. Лихачев. - М.: СОЛОН-Р, 2002. - С.202-219. 4. Цифровые электроприводы с транзисторными преобразователями / С.Г. Герман-Галкин и др. - Л.: Энергоатомиздат. Ленингр. Отд-ние, 1986. - С.39-53. 5. Штибен Г.А. Выбор фильтра для электроподвижного состава с импульсным регулированием напряжения. "Электротехника", 1972, - №4, С.19-22. Підписне Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюElectric drive of pointwork
Автори англійськоюBuriakovskyi Serhii Hennadiiovych
Назва патенту російськоюЭлектропривод стрелочного перевода
Автори російськоюБуряковский Сергей Геннадьевич
МПК / Мітки
МПК: B61L 5/00
Мітки: переводу, електропривід, стрілкового
Код посилання
<a href="https://ua.patents.su/4-25058-elektroprivid-strilkovogo-perevodu.html" target="_blank" rel="follow" title="База патентів України">Електропривід стрілкового переводу</a>
Електропривід стрілкового переводу рейкової колії

Номер патенту: 29526
Опубліковано: 15.11.2000
Автори: Подафа Петро Петрович, Кутовий Віктор Миколайович, Хицкій Володимир Костянтинович
МПК: B61L 5/00
Мітки: переводу, електропривід, рейкової, колії, стрілкового
Текст:
...рію "винахідницький рівень". На графічному зображенні поданий розріз заявленого електропривода стрілкового переводу рейкової колії. Електропривід стрілкового переводу рейковової колії складається з мета левого корпуса 1 циліндричної форми, закритого по торцях фланцями 2 і 3, які мають проточки для ущільнень 4 і 5, що забезпечують герметичність корпуса 1. Фланці 2 і 3 містять стакани 6 і 7, в центральних отворах яких через сальники 8 і 9...
Спосіб визначення змін ширини жолоба стрілкового переводу
Номер патенту: 69815
Опубліковано: 15.09.2004
Автор: Парфьонов Володимир Іванович
МПК: B61L 5/00
Мітки: переводу, жолоба, змін, визначення, стрілкового, спосіб, ширини
Формула / Реферат:
Спосіб визначення змін ширини жолоба стрілкового переводу, при якому лінійні зміни ширини жолоба за допомогою диференційного трансформаторного датчика перетворюють в електричні сигнали, який відрізняється тим, що на вимірювальну котушку датчика впливають рівномірно розподіленим магнітним полем, виробленим стабілізованим і високочастотним джерелом коливань, при цьому лінійні відхилення ширини жолоба визначають за алгебраїчною різницею,...
Спосіб контролю положення гостряка стрілкового переводу

Номер патенту: 61690
Опубліковано: 17.11.2003
Автор: Парфьонов Володимир Іванович
МПК: B61L 5/00
Мітки: спосіб, контролю, положення, стрілкового, гостряка, переводу
Формула / Реферат:
Спосіб контролю положення гостряка стрілкового переводу, при якому перетворюють, виділяють, підсилюють та індикують частоти коливань автогенератора, зв'язаного з гостряком, який відрізняється тим, що в перетворювачі коливання частотно модулюють в перешкодозахищеному діапазоні, безпосередньо біля гостряка, а далі виділяють, підсилюють та індикують частоти генератора тільки в кінцевих положеннях гостряка стрілкового переводу.
Спосіб дистанційного визначення дефектів електричних складових електродвигуна постійного струму стрілкового переводу
Номер патенту: 8530
Опубліковано: 15.08.2005
Автори: Руденко Олександр Борисович, Парфьонов Володимир Іванович
МПК: B61L 7/00
Мітки: дефектів, переводу, стрілкового, визначення, електричних, спосіб, струму, складових, електродвигуна, постійного, дистанційного
Формула / Реферат:
Спосіб дистанційного визначення дефектів електричних складових електродвигуна постійного струму стрілкового переводу, при якому виділяють, осцилографують, аналізують криву складову споживного струму, який відрізняється тим, що безперервно проводять миттєвий аналіз складової струму і при появі в спектрі гармонік в діапазоні від 20 до 10000 Гц за їх характеристиками роблять висновок про дефекти електричних складових електродвигуна стрілкового...
Пристрій для діагностики параметрів стрілочного переводу
Номер патенту: 69812
Опубліковано: 15.09.2004
Автор: Парфьонов Володимир Іванович
МПК: B61L 7/00
Мітки: пристрій, діагностики, стрілочного, параметрів, переводу
Формула / Реферат:
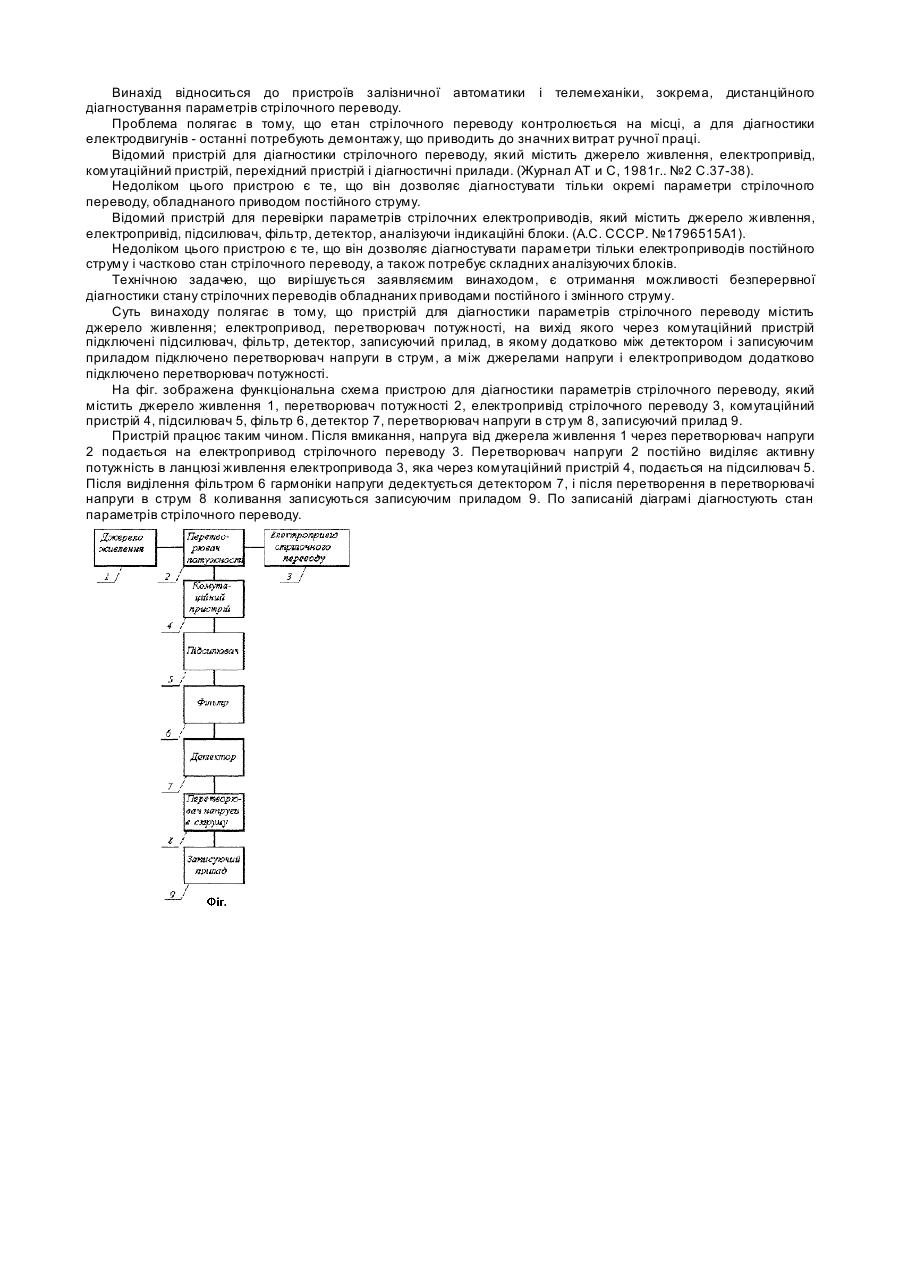
Пристрій для діагностики параметрів стрілочного переводу, який містить джерело живлення, електропривід, перетворювач потужності, на вихід якого через комутаційний пристрій підключені підсилювачі, фільтр, записуючий прилад, який відрізняється тим, що між детектором і записуючим приладом додатково підключено перетворювач напруги в струм, а між джерелом напруги і електроприводом стрілочного переводу - перетворювач потужності.
Попередній патент: Термоелектричний сплав
Наступний патент: Спосіб безпосередньої зубної імплантації
Випадковий патент: Сифон для біде