Канал вимірювання похилої дальності до літальних апаратів для лазерної інформаційно-вимірювальної системи
Номер патенту: 25803
Опубліковано: 27.08.2007
Автори: Баранник Володимир Вікторович, Висоцький Олег Володимирович, Кудряшов Володимир Вікторович, Коломійцев Олексій Володимирович, Чернятьєв Андрій Володимирович, Бєлімов Володимир Васильович, Альошин Геннадій Васильович, Кітов Вадим Станіславович, Хударковський Костянтин Ігорович
Формула / Реферат
Канал вимірювання похилої дальності до літальних апаратів для лазерної інформаційно-вимірювальної системи, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, селектор подовжніх мод, призми для частоти міжмодових биттів ![]() , блок дефлекторів, перемикач для частот міжмодових биттів
, блок дефлекторів, перемикач для частот міжмодових биттів ![]() і
і ![]() , передавальну оптику (ПРДО), приймальну оптику, фотодетектори, широкосмуговий підсилювач (ШП), резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, формувач імпульсів, тригер "1"|"0", схему І, лічильники, фільтр із заданою смугою пропущення, детектор, диференційовну оптику, підсилювач, фільтр, диференційовні ланцюжки, випрямлячі, електронно-цифрову обчислювальну машину (ЕЦОМ) та блок відображення вимірювальної інформації про похилу дальність R до літального апарата (ЛА), який відрізняється тим, що після ШП додатково введено інформаційний блок, який зв'язаний з ПРДО для формування передаваної інформації та ЕЦОМ для обробки інформації, що приймається з ЛА.
, передавальну оптику (ПРДО), приймальну оптику, фотодетектори, широкосмуговий підсилювач (ШП), резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, формувач імпульсів, тригер "1"|"0", схему І, лічильники, фільтр із заданою смугою пропущення, детектор, диференційовну оптику, підсилювач, фільтр, диференційовні ланцюжки, випрямлячі, електронно-цифрову обчислювальну машину (ЕЦОМ) та блок відображення вимірювальної інформації про похилу дальність R до літального апарата (ЛА), який відрізняється тим, що після ШП додатково введено інформаційний блок, який зв'язаний з ПРДО для формування передаваної інформації та ЕЦОМ для обробки інформації, що приймається з ЛА.
Текст
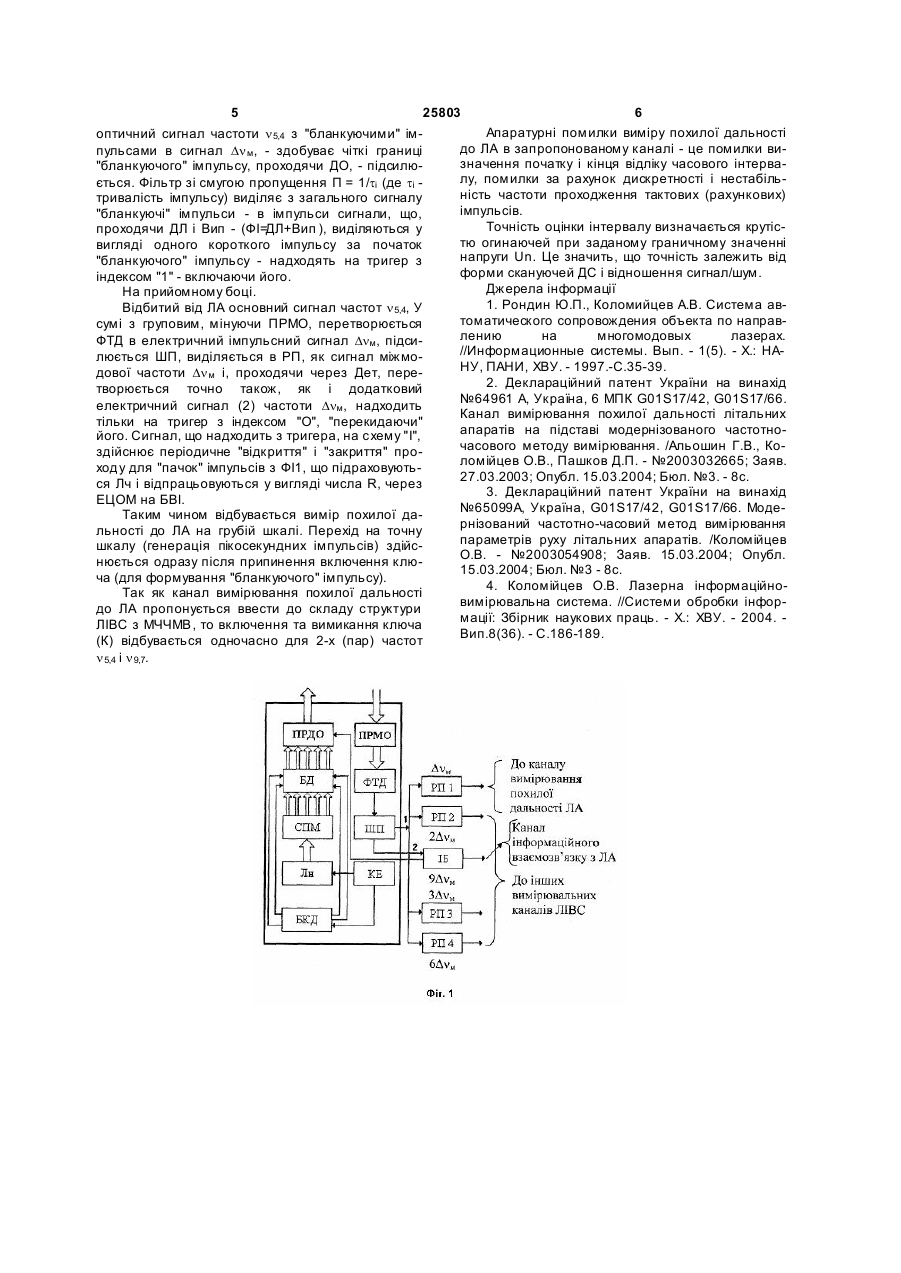
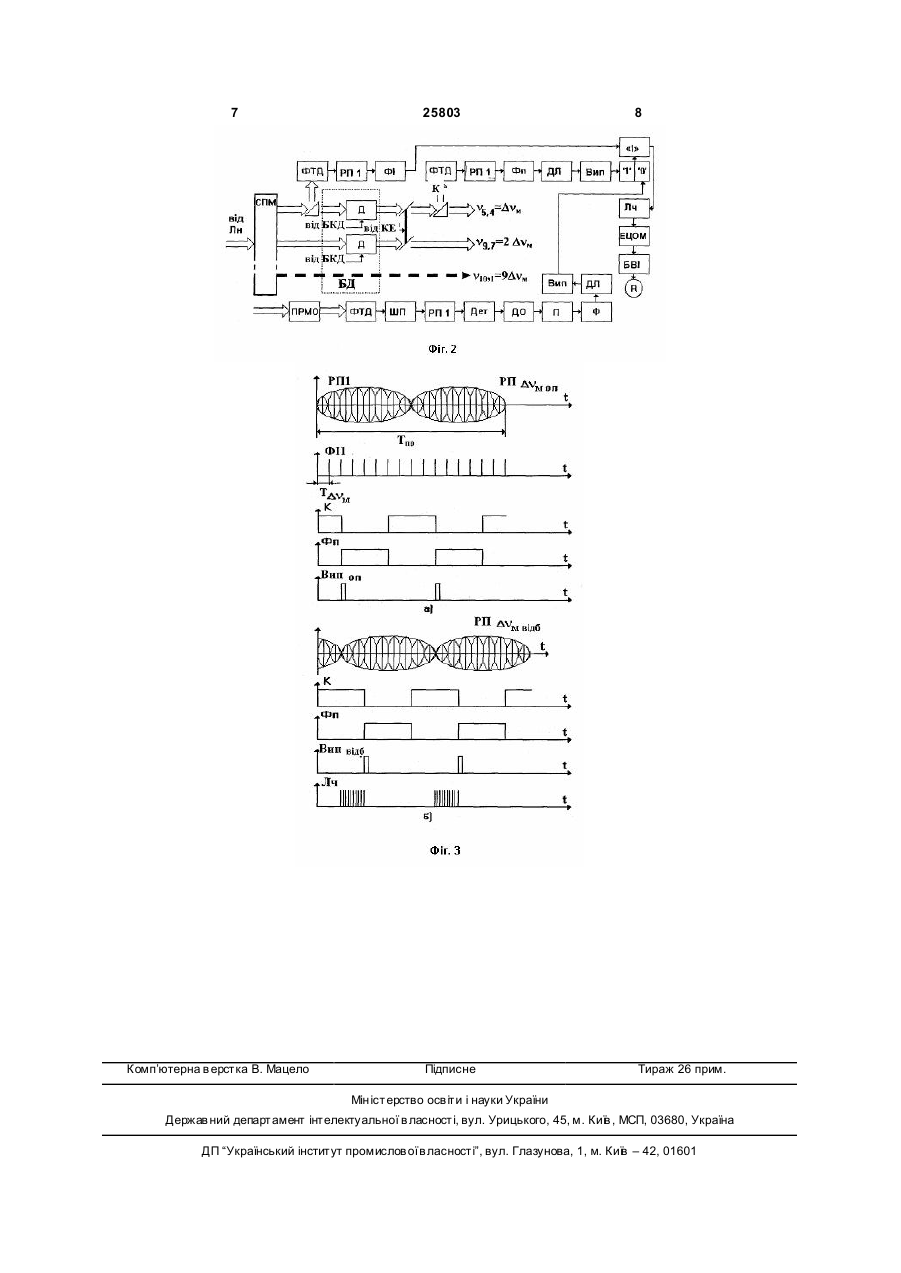
Канал вимірювання похилої дальності до літальних апаратів для лазерної інформаційновимірювальної системи, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, селектор подовжніх мод, призми для частоти міжмодових биттів D nм , блок дефлекторів, перемикач для частот міжмодових биттів D nм Запропонована корисна модель відноситься до галузі лазерних систем і може бути використана для синтезу лазерної інформаційновимірювальної системи (ЛІВС) з модернізованим частотно-часовим методом (МЧЧМ) вимірювання. Відома «Система автоматичного супроводження літального апарату за напрямком на багатомодових лазерах» [1], яка містить послідовно з'єднанні лазер з блоком лазерної накачки, селектор подовжніх мод, передаючу оптику, а для приймання сигналу - приймаючу оптику, фо тодетектор, резонансні підсилювачі, схеми порівняння, пристрій сигналу похибки, виконавчій пристрій. Система забезпечує автосупроводження літального апарату (ЛА) за напрямком (АСН). Недоліками відомої системи є те, що вона не вимірює похилу дальність до ЛА та не здійснює інформаційного взаємозв'язку з ним. Найбільш близьким до запропонованого технічним рішенням, обраним як прототип є «Канал вимірювання похилої дальності літальних апаратів на підставі модернізованого частотно-часового методу вимірювання» [2], який містить керуючий елемент (КЕ), блок керування дефлекторами (БКД), лазер з накачкою (Лн), селектор подовжніх мод (СПМ), призми для частоти міжмо-дових биттів Dn м , блок дефлекторів (БД), перемикач для частот міжмодових биттів Dn м і 2Dn м , передаючу оптику (ПРДО), приймаючу оптику (ПРМО), фо тодетектори (ФТД), широкосмуговий підсилювач (ШП), резонансні підсилювачі (РП), настроєні на відповідні частоти міжмодових биттів, формувач імпульсів (ФІ), тригер „1"|„0", схему «І», лічильники (Лч), фільтр із заданою смугою пропущення (Фп), детектор (Дет), диференцюєму оптику (ДО), підсилювач (П), фільтр (Ф), диференцюємі ланцюжки (ДЛ), випрямлячі (Вип), електронно-цифрову обчислювальну машину (ЕЦОМ) та блок відображення вимірювальної інформації (БВІ) про похилу дальність R до ЛА. Недоліком каналу-прототипу є відсутність можливості здійснювання інформаційного взаємозв'язку з ЛА. В основу корисної моделі поставлена задача створити канал вимірювання похилої дальності до літальних апаратів для лазерної інформаційно (19) UA (11) 25803 (13) U і 2Dnм , передавальну оптику (ПРДО), приймальну оптику, фотодетектори, широкосмуговий підсилювач (ШП), резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, формувач імпульсів, тригер "1"|"0", схему І, лічильники, фільтр із заданою смугою пропущення, детектор, диференційовну оптику, підсилювач, фільтр, диференційовні ланцюжки, випрямлячі, електронноцифрову обчислювальну машину (ЕЦОМ) та блок відображення вимірювальної інформації про похилу дальність R до літального апарата (ЛА), який відрізняє ться тим, що після ШП додатково введено інформаційний блок, який зв'язаний з ПРДО для формування передаваної інформації та ЕЦОМ для обробки інформації, що приймається з ЛА. 3 25803 4 вимірювальної системи, який дозволить здійснюблок відображення вимірювальної інформації про вати інформаційний взаємозв'язок з ЛА та високопохилу дальність R до ЛА. точне вимірювання похилої дальності. Робота запропонованого каналу полягає у наПоставлена задача вирішується за рахунок тоступному. го, що у відомий канал-прототип [2], який містить Із синхронізованого одномодового багаточаскеруючий елемент, блок керування дефлекторами, тотного спектра випромінювання YAG:Nd3+ - лазелазер з накачкою, селектор подовжніх мод, призми ра (Лн) за допомогою СПМ виділяються необхідні пари частот для створення: для частоти міжмодових биттів Dn м , блок дефлек- інформаціонного каналу зв'язку, при умові торів, перемикач для частот міжмодових биттів використання сигналу з різницевих частот міжмоDn м „ і 2Dn м , передаючу оптику, приймаючу оптику, дових биттів фотодетектори, широкосмуговий підсилювач, реDn 101=n 10`–n 1=9Dn м ; зонансні підсилювачі настроєні на відповідні час- рівносигнального напрямку (РСН) на основі тоти міжмодових биттів, формувач імпульсів, триформування сумарної ДС, завдяки частково перегер „1"|„0", схему «І», лічильники, фільтр із тинаючихся 4-х парціальних діаграм спрямованосзаданою смугою пропущення, детектор, диференті, при умові використання різницевих частот міжцюєму оптику, підсилювач, фільтр, диференцюємі модових биттів ланцюжки, випрямлячі, електронно-цифрову обчислювальну машину та блок відображення вимірюDn 54=n 5-n 4=Dn м , Dn 97=n 0-n 7=2Dnм , вальної інформації про похилу дальність R до ЛА, Dn 63=n 6-n 3=3Dn м , Dn 82=n 8-n 2=6Dnм . додатково після ШП введено інформаційний блок Сигнал частотою міжмодових биттів 9Dn м , ми(ІБ), який зв'язаний з ПРДО для формування пенаючи БД, потрапляє на ПРДО де змішується з редаваємої інформації та ЕЦОМ для обробки інсигналом від ІБ та формує передаваєму інформаформації, що приймається з ЛА. цію для ЛА (Фіг.1, 2). Водночас сигнал частот міжПобудова каналу вимірювання похилої дальмодових биттів Dn м , 2Dnм , 3Dnм та 6Dn м потрапляє ності R пов'язана з використанням одномодовим на БД, який створений з 4-х дефлекторів. Парціабогаточастотним випромінюванням лазера та льні ДС попарно зустрічне сканують БД у кожній із МЧЧМВ [3, 4], який дозволяє завдяки зустрічному двох ортогональних площин. Період сканування скануванню пар парціальних діаграм спрямованозадається БКД, який разом з Лн забезпечується сті (ДС) у кожній із двох ортогональних площин необхідним живленням від КЕ. Проходячи через вимірювати з високою точністю похилу дальність ПРДО, гр уповий лазерний імпульсний сигнал пар до ЛА по запізнюванню частот міжмодових биттів. частот: n 5,n 4=Dn м , n 9,n 7=2Dnм , n 6,n 3=3Dnм , Технічний результат, який може бути отримаn 8,n 2=6Dn м , та n 10,n 1=9Dn м фокусується в скануєми ний при здійсненні корисної моделі полягає в крапки простору, оскільки здійснюється зустрічне створенні інформаційного взаємозв'язку з ЛА та сканування двома парами ДС у кожній із двох орвисокоточному вимірюванні його похилої дальностогональних площин a і b або Х і У. ті у широкому діапазоні дальностей, починаючи з Принцип роботи грубої шкали каналу вимірюпочаткового моменту польоту при понадвузьких вання похилої дальності до ЛА для ЛІВС полягає в ДС. Такий канал пропонується використовувати у наступному (Фіг.2, 3). складі ЛІВС. На передаючому боці. На Фіг.1 приведено передаючий бік узагальнеВиділена селектором подовжніх мод із спектру ної структурної схеми запропонованого каналу випромінювання лазера перша пара частот n 54, вимірювання похилої дальності до літальних апарозщеплюється під дією розщепітеля (призми) на ратів. два оптичні сигнали: На Фіг.2 приведена узагальнена структурна 1) основний - сканований дефлектором під песхема запропонованого каналу вимірювання похивним кутом (з часом Тпр, що задається від БКД), лої дальності до літальних апаратів. який проходить через ключ (К) (для виділення На Фіг.3 приведені епюри напруг з виходів "бланкуючого" імпульсу (бланк - нуль)) і розщепіблоків вимірювання похилої дальності до ЛА: тель, де відбувається виділення додаткового сига) від блоку опорного сигналу; налу (2) - поступає на ПРДО і далі на ЛА; б) від блоку відбитого сигналу. 2) додатковий (1) - перетворюваний ФТД в Запропонований канал вимірювання похилої електричний імпульсний сигнал різницевої частоти дальності до літальних апаратів для лазерної інміжмодового биття Dn м - поступає на формувач формаційно-вимірювальної системи містить керуімпульсів ФІ1, де відбувається виділення «пачок» ючий елемент, блок керування дефлекторами, імпульсів, що приймаються схемою "I". лазер з накачкою, селектор подовжніх мод, призми Прийняті ПРМО, відбиті від ЛА інформаційний, для частоти міжмодових биттів Dn м , блок дефлекта в процесі сканування чотирьох діаграм спрямоторів, перемикач для частот міжмодових биттів ваності, лазерні імпульсні сигнали і огинаючи сигDn м і 2Dnм , передаючу оптику, приймаючу оптику, нали ДС за допомогою ФТД перетворюються в фотодетектори, широкосмуговий підсилювач, інелектричні імпульсні сигнали на різницевих частоформаційний блок, резонансні підсилювачі, натах міжмодових биттів. Посилювані ШП, вони розстроєні на відповідні частоти міжмодових биттів, поділяються в ІБ 9Dn м отр для обробки приймаємої формувач імпульсів, тригер „1"|„0", схему «І», ліінформації від ЛА та по РП, побудованих на відпочильники, фільтр із заданою смугою пропущення, відні частоти: Dnм , 2Dnм , 3Dn м , 6Dnм для виділення детектор, диференцюєму оптику, підсилювач, вимірювальної інформації про ЛА. При цьому, фільтр, диференцюємі ланцюжки, випрямлячі, отриманий від ФТД, перетворений додатковий електронно-цифрову обчислювальну машину та 5 25803 6 Апаратурні помилки виміру похилої дальності оптичний сигнал частоти n 5,4 з "бланкуючими" імдо ЛА в запропонованому каналі - це помилки випульсами в сигнал Dn м , - здобуває чіткі границі значення початку і кінця відліку часового інтерва"бланкуючого" імпульсу, проходячи ДО, - підсилюлу, помилки за рахунок дискретності і нестабільється. Фільтр зі смугою пропущення П = 1/tі (де tі ність частоти проходження тактових (рахункових) тривалість імпульсу) виділяє з загального сигналу імпульсів. "бланкуючі" імпульси - в імпульси сигнали, що, Точність оцінки інтервалу визначається крутіспроходячи ДЛ і Вип - (ФІ=ДЛ+Вип ), виділяються у тю огинаючей при заданому граничному значенні вигляді одного короткого імпульсу за початок напруги Un. Це значить, що точність залежить від "бланкуючого" імпульсу - надходять на тригер з форми скануючей ДС і відношення сигнал/шум. індексом "1" - включаючи його. Джерела інформації На прийомному боці. 1. Рондин Ю.П., Коломийцев А.В. Система авВідбитий від ЛА основний сигнал частот n 5,4, У томатического сопровождения объекта по направсумі з груповим, мінуючи ПРМО, перетворюється лению на многомодовых лазерах. ФТД в електричний імпульсний сигнал Dnм , підси//Информационные системы. Вып. - 1(5). - X.: НАлюється ШП, виділяється в РП, як сигнал міжмоНУ, ПАНИ, ХВУ. - 1997.-С.35-39. дової частоти Dn м і, проходячи через Дет, пере2. Деклараційний патент України на винахід творюється точно також, як і додатковий №64961 А, Україна, 6 МПК G01S17/42, G01S17/66. електричний сигнал (2) частоти Dnм , надходить Канал вимірювання похилої дальності літальних тільки на тригер з індексом "О", "перекидаючи" апаратів на підставі модернізованого частотнойого. Сигнал, що надходить з тригера, на схему "І", часового методу вимірювання. /Альошин Г.В., Коздійснює періодичне "відкриття" і "закриття" проломійцев О.В., Пашков Д.П. - №2003032665; Заяв. ходу для "пачок" імпульсів з ФІ1, що підраховують27.03.2003; Опубл. 15.03.2004; Бюл. №3. - 8с. ся Лч і відпрацьовуються у вигляді числа R, через 3. Деклараційний патент України на винахід ЕЦОМ на БВІ. №65099А, Україна, G01S17/42, G01S17/66. МодеТаким чином відбувається вимір похилої дарнізований частотно-часовий метод вимірювання льності до ЛА на грубій шкалі. Перехід на точну параметрів руху літальних апаратів. /Коломійцев шкалу (генерація пікосекундних імпульсів) здійсО.В. - №2003054908; Заяв. 15.03.2004; Опубл. нюється одразу після припинення включення клю15.03.2004; Бюл. №3 - 8с. ча (для формування "бланкуючого" імпульсу). 4. Коломійцев О.В. Лазерна інформаційноТак як канал вимірювання похилої дальності вимірювальна система. //Системи обробки інфордо ЛА пропонується ввести до складу структури мації: Збірник наукових праць. - X.: ХВУ. - 2004. ЛІВС з МЧЧМВ, то включення та вимикання ключа Вип.8(36). - С.186-189. (К) відбувається одночасно для 2-х (пар) частот n 5,4 і n 9,7. 7 Комп’ютерна в ерстка В. Мацело 25803 8 Підписне Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for measuring the slant range distance to an aircraft for a laser information and measuring system
Автори англійськоюKolomiitsev Oleksii Volodymyrovych, Alioshyn Hennadii Vasyliovych, Barannyk Volodymyr Viktorovych, Bielimov Volodymyr Vasyliovych, Vysotskyi Oleh Volodymyrovych, Kitov Vadym Stanislavovych, Khudarkovskyi Kostiantyn Ihorovych
Назва патенту російськоюУстройство для измерения наклонной дальности до летательного аппарата, используемое в лазерной информационно-измерительной системе
Автори російськоюКоломийцев Алексей Владимирович, Алешин Геннадий Васильевич, Баранник Владимир Викторович, Белимов Владимир Васильевич, Высоцкий Олег Владимирович, Китов Вадим Станиславович, Хударковский Константин Игоревич
МПК / Мітки
МПК: G01S 17/42
Мітки: інформаційно-вимірювальної, системі, літальних, вимірювання, лазерної, дальності, канал, похило, апаратів
Код посилання
<a href="https://ua.patents.su/4-25803-kanal-vimiryuvannya-pokhilo-dalnosti-do-litalnikh-aparativ-dlya-lazerno-informacijjno-vimiryuvalno-sistemi.html" target="_blank" rel="follow" title="База патентів України">Канал вимірювання похилої дальності до літальних апаратів для лазерної інформаційно-вимірювальної системи</a>
Канал вимірювання радіальної швидкості літальних апаратів для лазерної інформаційно-вимірювальної системи
Номер патенту: 25800
Опубліковано: 27.08.2007
Автори: Баранник Володимир Вікторович, Хударковський Костянтин Ігорович, Альошин Геннадій Васильович, Коломійцев Олексій Володимирович, Кітов Вадим Станіславович, Кудряшов Володимир Вікторович, Висоцький Олег Володимирович, Бєлімов Володимир Васильович, Чернятьєв Андрій Володимирович
МПК: G01S 17/42
Мітки: канал, лазерної, вимірювання, швидкості, радіальної, системі, інформаційно-вимірювальної, літальних, апаратів
Формула / Реферат:
Канал вимірювання радіальної швидкості літальних апаратів для лазерної інформаційно-вимірювальної системи, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, селектор подовжніх мод, блок дефлекторів, передавальну оптику (ПРДО), приймальну оптику, фотодетектор, широкосмуговий підсилювач (ШП), резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, формувачі імпульсів, схему І, лічильник,...
Канал автоматичного супроводження літальних апаратів за напрямком для лазерної інформаційно-вимірювальної системи
Номер патенту: 23213
Опубліковано: 10.05.2007
Автори: Хударковський Костянтин Ігорович, Кудряшов Валерій Євгенійович, Третяк В'ячеслав Федорович, Коломійцев Олексій Володимирович, Костенко Ігор Леонідович, Альошин Геннадій Васильович, Бєлімов Володимир Васильович, Баранник Володимир Вікторович, Кітов Вадим Станіславович
МПК: G01S 17/42, G01S 17/66
Мітки: автоматичного, інформаційно-вимірювальної, апаратів, супроводження, літальних, напрямком, канал, лазерної, системі
Формула / Реферат:
Канал автоматичного супроводження літальних апаратів за напрямком для лазерної інформаційно-вимірювальної системи, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, селектор подовжніх мод, блок дефлекторів, передавальну оптику, приймальну оптику, фотодетектор, широкосмуговий підсилювач (ШП), резонансні підсилювачі, настроєні на відповідні частоти міжмодових бітів, детектори, фільтри, формувачі імпульсів, тригери...
Канал вимірювання похилої дальності літальних апаратів на основі модернізованого частотно-часового метода вимірювання

Номер патенту: 64961
Опубліковано: 15.03.2004
Автори: Альошин Геннадій Васильович, Коломійцев Олексій Володимирович, Пашков Дмитро Павлович
МПК: G01S 17/42
Мітки: літальних, вимірювання, модернізованого, апаратів, похило, основі, канал, частотно-часового, дальності, метода
Формула / Реферат:
Канал вимірювання похилої дальності літальних апаратів на основі модернізованого частотно-часового метода, що містить послідовно підключені лазер з накачкою, селектор подовжніх мод (СПМ), передавальну оптику, приймальну оптику, фотодетектор, резонансні підсилювачі, схеми порівняння (СП) амплітуд, підсилювачі (фільтри) сигналів похибок (ПСП) та виконавчі пристрої (ВП) керування кутами азимута і місця, який відрізняється тим, що додатково на...
Канал вимірювання радіальної швидкості літальних апаратів на основі модернізованого частотно-часового методу вимірювання
Номер патенту: 61680
Опубліковано: 17.11.2003
Автори: Коломійцев Олексій Володимирович, Пашков Дмитро Павлович, Альошин Геннадій Васильович
МПК: G01S 17/42
Мітки: апаратів, модернізованого, літальних, радіальної, канал, методу, частотно-часового, вимірювання, швидкості, основі
Формула / Реферат:
Канал вимірювання радіальної швидкості літальних апаратів на основі модернізованого частотно-часового методу, що містить послідовно підключені лазер з накачкою, селектор подовжніх мод (СПМ), передавальну оптику, приймальну оптику, фотодетектор, резонансні підсилювачі, схеми порівняння (СП) амплітуд, підсилювачі (фільтри) сигналів похибок (ПСП) та виконавчі пристрої (ВП) керування кутами азимута і місця, який відрізняється тим, що з метою...
Селектор подовжніх мод для лазерної інформаційно-вимірювальної системи
Номер патенту: 23215
Опубліковано: 10.05.2007
Автори: Баранник Володимир Вікторович, Коломійцев Олексій Володимирович, Кудряшов Віктор Євгенійович, Третяк В'ячеслав Федорович, Костенко Ігор Леонідович, Альошин Геннадій Васильович, Бєлімов Володимир Васильович, Кітов Вадим Станіславович, Хударковський Костянтин Ігорович
МПК: H04Q 1/30
Мітки: подовжніх, лазерної, інформаційно-вимірювальної, селектор, системі, мод
Формула / Реферат:
Селектор подовжніх мод для лазерної інформаційно-вимірювальної системи, виконаний на основі вузькосмугових інтерферометрів Фабрі-Перо (ІФП), число яких дорівнює числу селектованих подовжніх мод, який містить в кожному з каналів: оптичний поляризатор (ОП) випромінювання, пасивну фазову пластинку λ/4, що повертає вектор Е минаючого випромінювання на кут 45° за один прохід, вузькосмуговий ІФП, настроєний на сигнал визначеної комбінації мод...