Канал вимірювання кутових швидкостей літальних апаратів для лазерної інформаційно-вимірювальної системи
Номер патенту: 25804
Опубліковано: 27.08.2007
Автори: Альошин Геннадій Васильович, Коломійцев Олексій Володимирович, Висоцький Олег Володимирович, Бєлімов Володимир Васильович, Чернятьєв Андрій Володимирович, Хударковський Костянтин Ігорович, Баранник Володимир Вікторович, Кітов Вадим Станіславович, Кудряшов Володимир Вікторович
Формула / Реферат
Канал вимірювання кутових швидкостей літальних апаратів для лазерної інформаційно-вимірювальної системи, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, селектор подовжніх мод, блок дефлекторів, передавальну оптику (ПРДО), приймальну оптику, фотодетектор, широкосмуговий підсилювач (ШП), резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, формувачі імпульсів, тригери "1"|"0", схеми І, реверсивні лічильники, схеми порівняння, електронно-цифрову обчислювальну машину (ЕЦОМ), ![]() - введення опорних сигналів з частотами міжмодових биттів
- введення опорних сигналів з частотами міжмодових биттів ![]() від передавального лазера, який відрізняється тим, що після ШП додатково введено інформаційний блок, який зв'язаний з ПРДО для формування передаваної інформації та ЕЦОМ для обробки прийманої інформації з ЛА і її відображення.
від передавального лазера, який відрізняється тим, що після ШП додатково введено інформаційний блок, який зв'язаний з ПРДО для формування передаваної інформації та ЕЦОМ для обробки прийманої інформації з ЛА і її відображення.
Текст
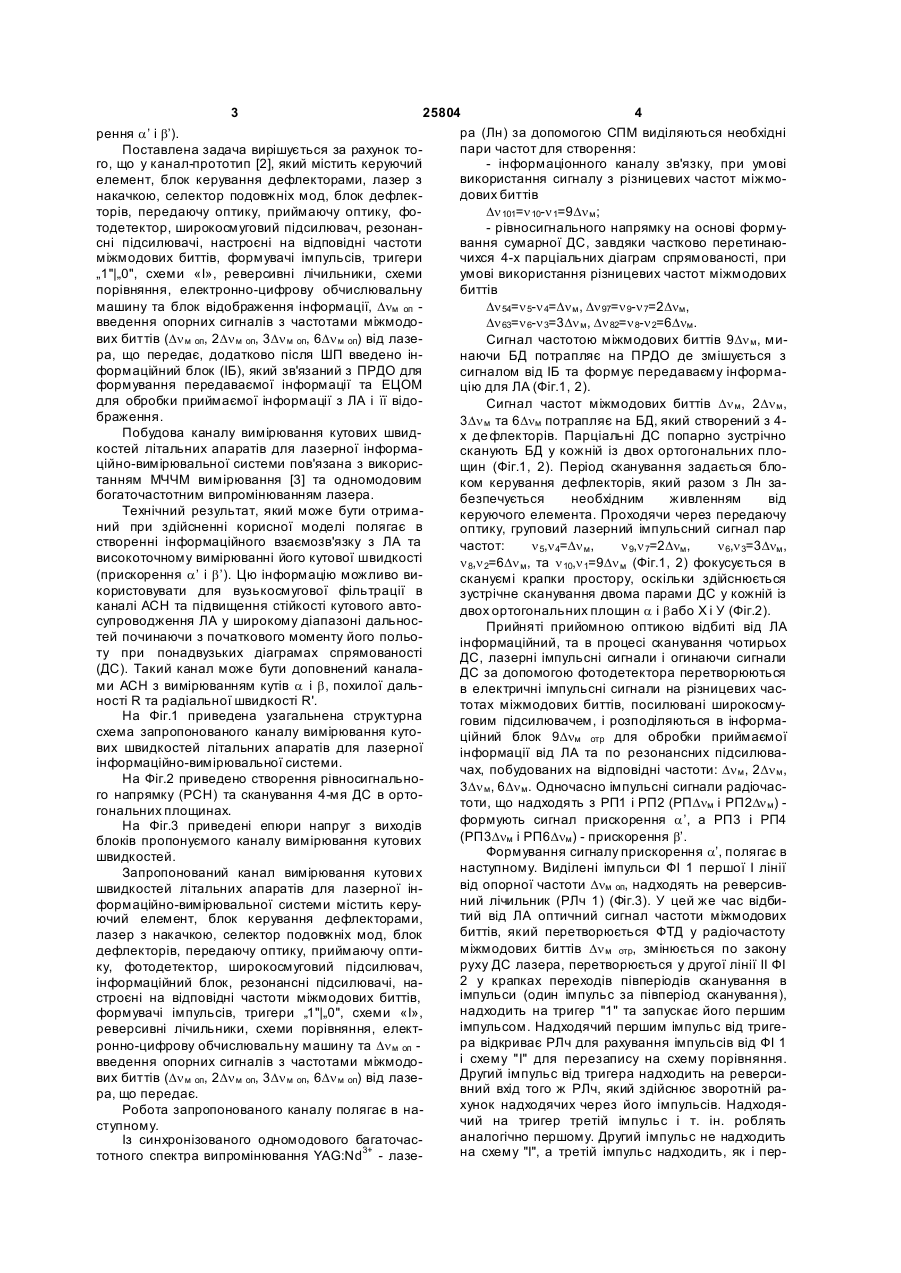
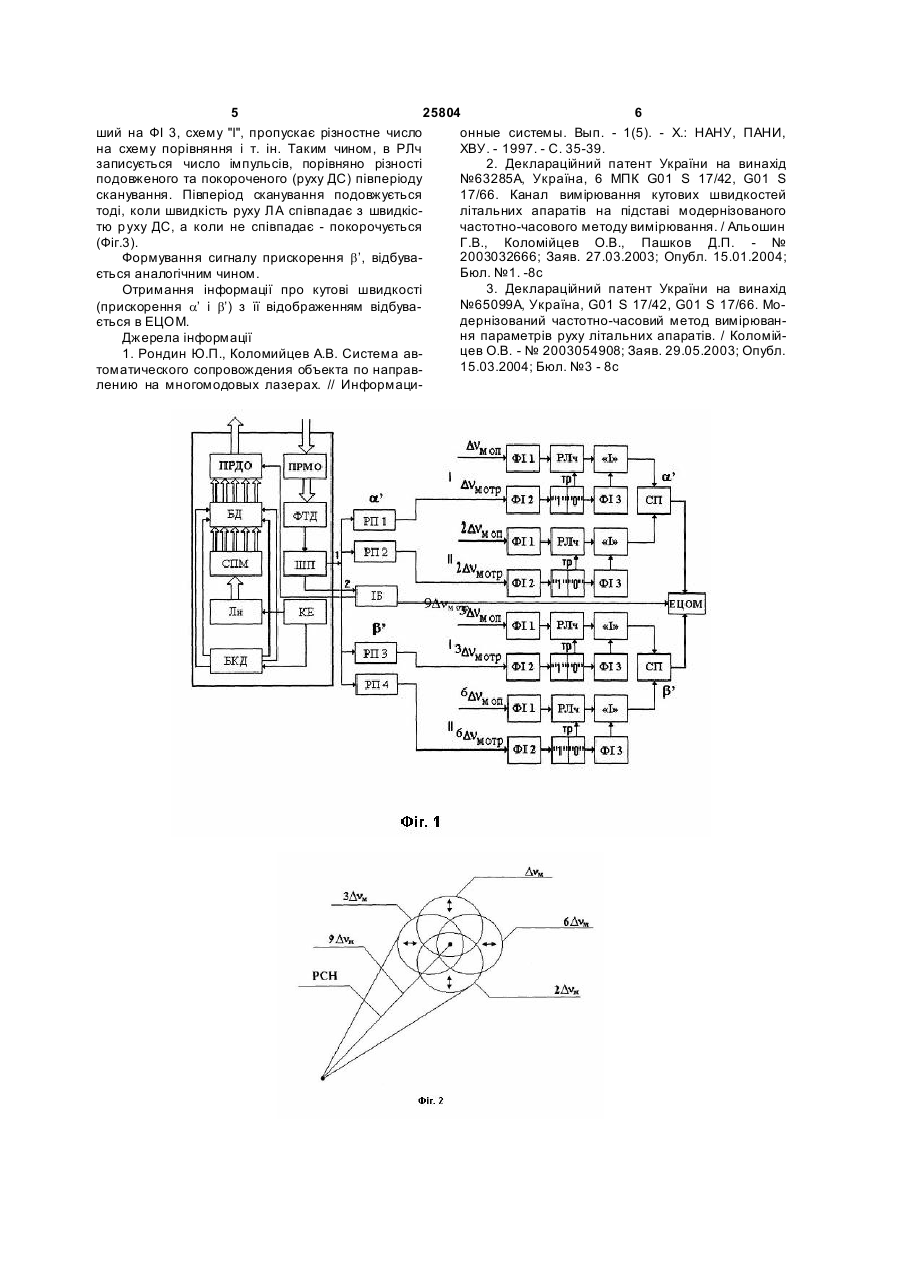
Канал вимірювання кутових швидкостей літальних апаратів для лазерної інформаційновимірювальної системи, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, селектор подовжніх мод, блок дефлекторів, передавальну оптику (ПРДО), приймальну оптику, фотодетектор, широкосмуговий підсилювач (ШП), резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, формувачі імпульсів, тригери "1"|"0", схеми І, реверсивні лічильники, схеми порівняння, електронно-цифрову обчислювальну машину (ЕЦОМ), Dnм оп - введен Запропонована корисна модель відноситься до галузі лазерних систем і може бути використана для синтезу лазерної інформаційновимірювальної системи (ЛІВС) з модернізованим частотно-часовим методом (МЧЧМ) вимірювання. Відома «Система автоматичного супроводження літального апарату за напрямком на багатомодових лазерах» [1], яка містить послідовно з'єднанні лазер з блоком лазерної накачки, селектор подовжніх мод, передаючу оптику, а для приймання сигналу - приймаючу оптику, фо тодетектор, резонансні підсилювачі, схеми порівняння, пристрій сигналу похибки, виконавчій пристрій. Система забезпечує автосупроводження літального апарату (ЛА) за напрямком (АСН). Недоліками системи є те, що вона не вимірює кутову швидкість ЛА та не використовує цю інформацію для оптимальної фільтрації слабих сигналів відбитих від ЛА з великої дальності, тобто для підвищення стійкості (астатизму) каналу АСН. Найбільш близьким до запропонованого технічним рішенням, обраним як прототип є «Канал вимірювання кутових швидкостей літальних апаратів на підставі модернізованого частотно часового методу вимірювання» [2], який містить керуючий елемент (КЕ), блок керування дефлекторами (БКД), лазер з накачкою (Лн), селектор подовжніх мод (СПМ), блок дефлекторів (БД), передаючу оптику (ПРДО), приймаючу оптику (ПРМО), фотодетектор (ФТД), широкосмуговий підсилювач (ШП), резонансні підсилювачі (РП), настроєні на відповідні частоти міжмодових биттів, формувачі імпульсів (ФІ), тригери „1"|„0", схеми «І», резонансні лічильники (РЛч), схеми порівняння (СП), електронно-цифрову обчислювальну машину (ЕЦОМ) та блоки відображення інформації (БВІ), Dn м оп - введення опорних сигналів з частотами міжмодових биттів (Dn м оп, 2Dn м оп, 3Dn м оп, 6Dn м оп) від передаючого лазера. Недоліком каналу-прототипу є відсутність можливості здійснювання інформаційного взаємозв'язку з ЛА. В основу корисної моделі поставлена задача створити канал вимірювання кутових швидкостей літальних апаратів для лазерної інформаційновимірювальної системи, який дозволить здійснювати інформаційний взаємозв'язок з ЛА та високоточне вимірювання кутових швидкостей (приско ня опорних сигналів з частотами міжмодових биттів D n м оп , 2 Dn м оп , 3 D n м оп , 6 Dn м оп від передавального лазера, який відрізняється тим, що після ШП додатково введено інформаційний блок, який зв'язаний з ПРДО для формування передаваної інформації та ЕЦОМ для обробки прийманої інформації з ЛА і її відображення. ) (19) UA (11) 25804 (13) U ( 3 25804 4 ра (Лн) за допомогою СПМ виділяються необхідні рення a’ і b’). пари частот для створення: Поставлена задача вирішується за рахунок того, що у канал-прототип [2], який містить керуючий - інформаціонного каналу зв'язку, при умові використання сигналу з різницевих частот міжмоелемент, блок керування дефлекторами, лазер з дових биттів накачкою, селектор подовжніх мод, блок дефлекторів, передаючу оптику, приймаючу оптику, фоDn 101=n 10-n 1=9Dn м ; тодетектор, широкосмуговий підсилювач, резонан- рівносигнального напрямку на основі формусні підсилювачі, настроєні на відповідні частоти вання сумарної ДС, завдяки частково перетинаюміжмодових биттів, формувачі імпульсів, тригери чихся 4-х парціальних діаграм спрямованості, при „1"|„0", схеми «І», реверсивні лічильники, схеми умові використання різницевих частот міжмодових порівняння, електронно-цифрову обчислювальну биттів машину та блок відображення інформації, Dnм оп Dn 54=n 5-n 4=Dn м , Dn 97=n 9-n 7=2Dnм , введення опорних сигналів з частотами міжмодоDn 63=n 6-n 3=3Dn м , Dn 82=n 8-n 2=6Dnм . вих биттів (Dn м оп, 2Dn м оп, 3Dn м оп, 6Dn м оп) від лазеСигнал частотою міжмодових биттів 9Dn м , мира, що передає, додатково після ШП введено іннаючи БД потрапляє на ПРДО де змішується з формаційний блок (ІБ), який зв'язаний з ПРДО для сигналом від ІБ та формує передаваєму інформаформування передаваємої інформації та ЕЦОМ цію для ЛА (Фіг.1, 2). для обробки приймаємої інформації з ЛА і її відоСигнал частот міжмодових биттів Dn м , 2Dn м , браження. 3Dn м та 6Dnм потрапляє на БД,який створений з 4Побудова каналу вимірювання кутових швидх де флекторів. Парціальні ДС попарно зустрічно костей літальних апаратів для лазерної інформасканують БД у кожній із двох ортогональних плоційно-вимірювальної системи пов'язана з викорисщин (Фіг.1, 2). Період сканування задається блотанням МЧЧМ вимірювання [3] та одномодовим ком керування дефлекторів, який разом з Лн забогаточастотним випромінюванням лазера. безпечується необхідним живленням від Технічний результат, який може бути отримакеруючого елемента. Проходячи через передаючу ний при здійсненні корисної моделі полягає в оптику, груповий лазерний імпульсний сигнал пар створенні інформаційного взаємозв'язку з ЛА та частот: n 5,n 4=Dn м , n 9,n 7=2Dnм , n 6,n 3=3Dnм , високоточному вимірюванні його кутової швидкості n 8,n 2=6Dn м , та n 10,n 1=9Dn м (Фіг.1, 2) фокусується в (прискорення a’ і b’). Цю інформацію можливо вискануємі крапки простору, оскільки здійснюється користовувати для вузькосмугової фільтрації в зустрічне сканування двома парами ДС у кожній із каналі АСН та підвищення стійкості кутового автодвох ортогональних площин a і bабо X і У (Фіг.2). супроводження ЛА у широкому діапазоні дальносПрийняті прийомною оптикою відбиті від ЛА тей починаючи з початкового моменту його польоінформаційний, та в процесі сканування чотирьох ту при понадвузьких діаграмах спрямованості ДС, лазерні імпульсні сигнали і огинаючи сигнали (ДС). Такий канал може бути доповнений каналаДС за допомогою фотодетектора перетворюються ми АСН з вимірюванням кутів a і b, похилої дальв електричні імпульсні сигнали на різницевих часності R та радіальної швидкості R'. тотах міжмодових биттів, посилювані широкосмуНа Фіг.1 приведена узагальнена структурна говим підсилювачем, і розподіляються в інформасхема запропонованого каналу вимірювання кутоційний блок 9Dnм отр для обробки приймаємої вих швидкостей літальних апаратів для лазерної інформації від ЛА та по резонансних підсилюваінформаційно-вимірювальної системи. чах, побудованих на відповідні частоти: Dn м , 2Dn м , На Фіг.2 приведено створення рівносигнально3Dn м , 6Dn м . Одночасно імпульсні сигнали радіочасго напрямку (РСН) та сканування 4-мя ДС в ортототи, що надходять з РП1 і РП2 (РПDnм і PП2Dn м ) гональних площинах. формують сигнал прискорення a’, а РП3 і РП4 На Фіг.3 приведені епюри напруг з виходів (РП3Dnм і РП6Dnм ) - прискорення b’. блоків пропонуємого каналу вимірювання кутових Формування сигналу прискорення a’, полягає в швидкостей. наступному. Виділені імпульси ФІ 1 першої І лінії Запропонований канал вимірювання кутови х від опорної частоти Dnм оп, надходять на реверсившвидкостей літальних апаратів для лазерної інний лічильник (РЛч 1) (Фіг.3). У цей же час відбиформаційно-вимірювальної системи містить керутий від ЛА оптичний сигнал частоти міжмодових ючий елемент, блок керування дефлекторами, биттів, який перетворюється ФТД у радіочастоту лазер з накачкою, селектор подовжніх мод, блок міжмодових биттів Dn м отр, змінюється по закону дефлекторів, передаючу оптику, приймаючу оптируху ДС лазера, перетворюється у другої лінії II ФІ ку, фотодетектор, широкосмуговий підсилювач, 2 у крапках переходів півперіодів сканування в інформаційний блок, резонансні підсилювачі, наімпульси (один імпульс за півперіод сканування), строєні на відповідні частоти міжмодових биттів, надходить на тригер "1" та запускає його першим формувачі імпульсів, тригери „1"|„0", схеми «І», імпульсом. Надходячий першим імпульс від тригереверсивні лічильники, схеми порівняння, електра відкриває РЛч для рахування імпульсів від ФІ 1 ронно-цифрову обчислювальну машину та Dn м оп і схему "І" для перезапису на схему порівняння. введення опорних сигналів з частотами міжмодоДругий імпульс від тригера надходить на реверсивих биттів (Dn м оп, 2Dn м оп, 3Dn м оп, 6Dn м оп) від лазевний вхід того ж РЛч, який здійснює зворотній рара, що передає. хунок надходячих через його імпульсів. НадходяРобота запропонованого каналу полягає в начий на тригер третій імпульс і т. ін. роблять ступному. аналогічно першому. Другий імпульс не надходить Із синхронізованого одномодового багаточас3+ на схему "І", а третій імпульс надходить, як і пертотного спектра випромінювання YAG:Nd - лазе 5 25804 6 ший на ФІ 3, схему "І", пропускає різностне число онные системы. Вып. - 1(5). - X.: НАНУ, ПАНИ, на схему порівняння і т. ін. Таким чином, в РЛч ХВУ. - 1997. - С. 35-39. записується число імпульсів, порівняно різності 2. Деклараційний патент України на винахід подовженого та покороченого (руху ДС) півперіоду №63285А, Україна, 6 МПК G01 S 17/42, G01 S сканування. Півперіод сканування подовжується 17/66. Канал вимірювання кутових швидкостей тоді, коли швидкість руху ЛА співпадає з швидкіслітальних апаратів на підставі модернізованого тю р уху ДС, а коли не співпадає - покорочується частотно-часового методу вимірювання. / Альошин (Фіг.3). Г.В., Коломійцев О.В., Пашков Д.П. - № 2003032666; Заяв. 27.03.2003; Опубл. 15.01.2004; Формування сигналу прискорення b’, відбуваБюл. №1. -8с ється аналогічним чином. 3. Деклараційний патент України на винахід Отримання інформації про кутові швидкості №65099А, Україна, G01 S 17/42, G01 S 17/66. Мо(прискорення a’ і b’) з її відображенням відбувадернізований частотно-часовий метод вимірюванється в ЕЦОМ. ня параметрів руху літальних апаратів. / КоломійДжерела інформації цев О.В. - № 2003054908; Заяв. 29.05.2003; Опубл. 1. Рондин Ю.П., Коломийцев А.В. Система ав15.03.2004; Бюл. №3 - 8с томатического сопровождения объекта по направлению на многомодовых лазерах. // Информаци 7 Комп’ютерна в ерстка А. Крижанівський 25804 8 Підписне Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for measuring the angular velocity of an aircraft for a laser information and measuring system
Автори англійськоюKolomiitsev Oleksii Volodymyrovych, Alioshyn Hennadii Vasyliovych, Barannyk Volodymyr Viktorovych, Bielimov Volodymyr Vasyliovych, Vysotskyi Oleh Volodymyrovych, Kitov Vadym Stanislavovych, Khudarkovskyi Kostiantyn Ihorovych
Назва патенту російськоюУстройство для измерения угловой скорости летательного аппарата, используемое в лазерной информационно-измерительной системе
Автори російськоюКоломийцев Алексей Владимирович, Алешин Геннадий Васильевич, Баранник Владимир Викторович, Белимов Владимир Васильевич, Высоцкий Олег Владимирович, Китов Вадим Станиславович, Хударковский Константин Игоревич
МПК / Мітки
МПК: G01S 17/66, G01S 17/42
Мітки: системі, канал, апаратів, швидкостей, вимірювання, літальних, лазерної, інформаційно-вимірювальної, кутових
Код посилання
<a href="https://ua.patents.su/4-25804-kanal-vimiryuvannya-kutovikh-shvidkostejj-litalnikh-aparativ-dlya-lazerno-informacijjno-vimiryuvalno-sistemi.html" target="_blank" rel="follow" title="База патентів України">Канал вимірювання кутових швидкостей літальних апаратів для лазерної інформаційно-вимірювальної системи</a>
Канал вимірювання радіальної швидкості літальних апаратів для лазерної інформаційно-вимірювальної системи
Номер патенту: 25800
Опубліковано: 27.08.2007
Автори: Кітов Вадим Станіславович, Коломійцев Олексій Володимирович, Баранник Володимир Вікторович, Кудряшов Володимир Вікторович, Альошин Геннадій Васильович, Висоцький Олег Володимирович, Хударковський Костянтин Ігорович, Бєлімов Володимир Васильович, Чернятьєв Андрій Володимирович
МПК: G01S 17/42
Мітки: апаратів, лазерної, радіальної, швидкості, канал, інформаційно-вимірювальної, вимірювання, літальних, системі
Формула / Реферат:
Канал вимірювання радіальної швидкості літальних апаратів для лазерної інформаційно-вимірювальної системи, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, селектор подовжніх мод, блок дефлекторів, передавальну оптику (ПРДО), приймальну оптику, фотодетектор, широкосмуговий підсилювач (ШП), резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, формувачі імпульсів, схему І, лічильник,...
Канал вимірювання похилої дальності до літальних апаратів для лазерної інформаційно-вимірювальної системи
Номер патенту: 25803
Опубліковано: 27.08.2007
Автори: Коломійцев Олексій Володимирович, Баранник Володимир Вікторович, Хударковський Костянтин Ігорович, Альошин Геннадій Васильович, Кудряшов Володимир Вікторович, Висоцький Олег Володимирович, Кітов Вадим Станіславович, Бєлімов Володимир Васильович, Чернятьєв Андрій Володимирович
МПК: G01S 17/42
Мітки: системі, апаратів, інформаційно-вимірювальної, канал, дальності, вимірювання, лазерної, літальних, похило
Формула / Реферат:
Канал вимірювання похилої дальності до літальних апаратів для лазерної інформаційно-вимірювальної системи, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, селектор подовжніх мод, призми для частоти міжмодових биттів , блок дефлекторів, перемикач для частот міжмодових биттів і...
Канал автоматичного супроводження літальних апаратів за напрямком для лазерної інформаційно-вимірювальної системи
Номер патенту: 23213
Опубліковано: 10.05.2007
Автори: Костенко Ігор Леонідович, Коломійцев Олексій Володимирович, Третяк В'ячеслав Федорович, Кудряшов Валерій Євгенійович, Альошин Геннадій Васильович, Хударковський Костянтин Ігорович, Кітов Вадим Станіславович, Баранник Володимир Вікторович, Бєлімов Володимир Васильович
МПК: G01S 17/66, G01S 17/42
Мітки: інформаційно-вимірювальної, канал, автоматичного, супроводження, апаратів, лазерної, системі, літальних, напрямком
Формула / Реферат:
Канал автоматичного супроводження літальних апаратів за напрямком для лазерної інформаційно-вимірювальної системи, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, селектор подовжніх мод, блок дефлекторів, передавальну оптику, приймальну оптику, фотодетектор, широкосмуговий підсилювач (ШП), резонансні підсилювачі, настроєні на відповідні частоти міжмодових бітів, детектори, фільтри, формувачі імпульсів, тригери...
Канал вимірювання кутових швидкостей літальних апаратів на основі модернізованого частотно-часового методу
Номер патенту: 63285
Опубліковано: 15.01.2004
Автори: Пашков Дмитро Павлович, Альошин Геннадій Васильович, Коломійцев Олексій Володимирович
МПК: G01S 11/00, G01S 17/42
Мітки: літальних, канал, кутових, методу, вимірювання, частотно-часового, модернізованого, основі, апаратів, швидкостей
Формула / Реферат:
Канал вимірювання кутових швидкостей літальних апаратів на основі модернізованого частотно-часового методу, що містить послідовно підключені лазер з накачкою, селектор подовжніх мод, передавальну оптику, приймальну оптику, фотодетектор, резонансні підсилювачі, схеми порівняння амплітуд, підсилювачі у вигляді фільтрів сигналів похибок та виконавчі пристрої керування кутами азимута і місця, який відрізняється тим, що додатково після...
Канал вимірювання радіальної швидкості літальних апаратів на основі модернізованого частотно-часового методу вимірювання
Номер патенту: 61680
Опубліковано: 17.11.2003
Автори: Пашков Дмитро Павлович, Альошин Геннадій Васильович, Коломійцев Олексій Володимирович
МПК: G01S 17/42
Мітки: частотно-часового, швидкості, модернізованого, радіальної, канал, апаратів, методу, літальних, вимірювання, основі
Формула / Реферат:
Канал вимірювання радіальної швидкості літальних апаратів на основі модернізованого частотно-часового методу, що містить послідовно підключені лазер з накачкою, селектор подовжніх мод (СПМ), передавальну оптику, приймальну оптику, фотодетектор, резонансні підсилювачі, схеми порівняння (СП) амплітуд, підсилювачі (фільтри) сигналів похибок (ПСП) та виконавчі пристрої (ВП) керування кутами азимута і місця, який відрізняється тим, що з метою...
Попередній патент: Канал вимірювання похилої дальності до літальних апаратів для лазерної інформаційно-вимірювальної системи
Наступний патент: Пристрій захисту від завад
Випадковий патент: Оболонки для обробки зі змінюваною конфігурацією