Канал вимірювання радіальної швидкості літальних апаратів на основі модернізованого частотно-часового методу вимірювання
Номер патенту: 61680
Опубліковано: 17.11.2003
Автори: Коломійцев Олексій Володимирович, Пашков Дмитро Павлович, Альошин Геннадій Васильович
Формула / Реферат
Канал вимірювання радіальної швидкості літальних апаратів на основі модернізованого частотно-часового методу, що містить послідовно підключені лазер з накачкою, селектор подовжніх мод (СПМ), передавальну оптику, приймальну оптику, фотодетектор, резонансні підсилювачі, схеми порівняння (СП) амплітуд, підсилювачі (фільтри) сигналів похибок (ПСП) та виконавчі пристрої (ВП) керування кутами азимута і місця, який відрізняється тим, що з метою високоточного вимірювання радіальної швидкості літальних апаратів, до складу шестипараметричної лазерної вимірювальної системи додатково після СПМ послідовно введено блок дефлекторів, керування яким здійснюється введеними блоком керування дефлекторами та керуючим елементом, після фотодетектора послідовно введено широкосмуговий підсилювач, а для отримання інформації про радіальну швидкість послідовно введено резонансні підсилювачі, настроєні на відповідні частоти міжмодових бітів (![]() ,
,![]() ,
,![]() ,
,![]() ),
),![]() - введення опорної частоти (
- введення опорної частоти (![]() оп) від передавального лазера, змішувачі, фільтри, формувачі імпульсів, формувачі мірних імпульсів, схеми І, лічильники, дешифратор, фазове автопідстроювання частоти на частоті міжмодових бітів, керуючий генератор, опорний генератор з частотою підставлення
оп) від передавального лазера, змішувачі, фільтри, формувачі імпульсів, формувачі мірних імпульсів, схеми І, лічильники, дешифратор, фазове автопідстроювання частоти на частоті міжмодових бітів, керуючий генератор, опорний генератор з частотою підставлення ![]() , електронно-цифрові обчислювальні машини та блоки відображення вимірюваної інформації про радіальну швидкість R'.
, електронно-цифрові обчислювальні машини та блоки відображення вимірюваної інформації про радіальну швидкість R'.
Текст
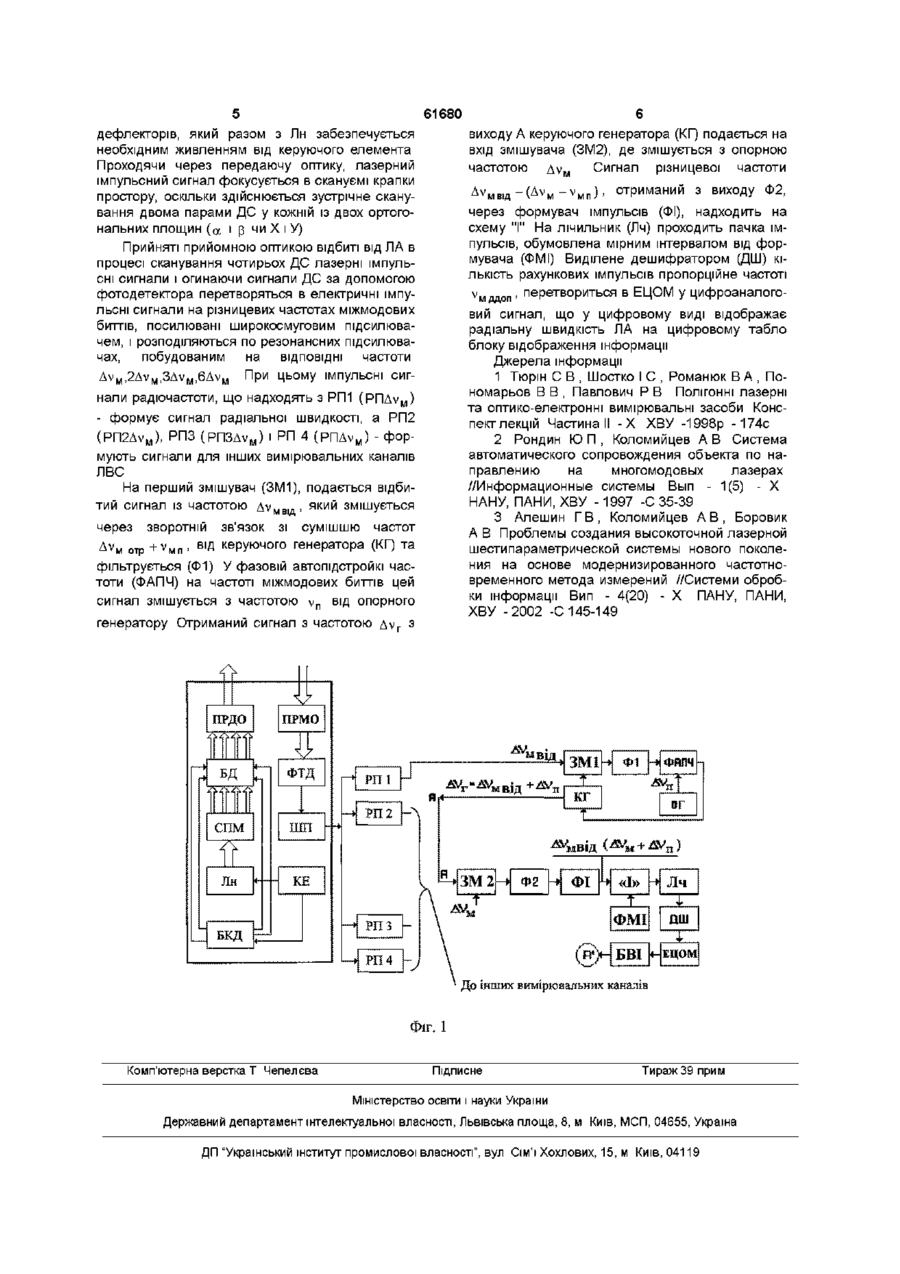
Канал вимірювання радіальної швидкості літальних апаратів на основі модернізованого частотно-часового методу, що містить послідовно підключені лазер з накачкою, селектор подовжніх мод (СПМ), передавальну оптику, приймальну оптику, фотодетектор, резонансні підсилювачі, схеми порівняння (СП) амплітуд, підсилювачі (фільтри) сигналів похибок (ПСП) та виконавчі пристрої (ВП) керування кутами азимута і місця, який відрізняється тим, що з метою високоточного вимірювання радіальної швидкості літальних апаратів, до складу шестипараметричної лазер ної вимірювальної системи додатково після СПМ послідовно введено блок дефлекторів, керування яким здійснюється введеними блоком керування дефлекторами та керуючим елементом, після фотодетектора послідовно введено широкосмуговий підсилювач, а для отримання інформації про радіальну швидкість послідовно введено резонансні підсилювачі, настроєні на ВІДПОВІДНІ частоти міжмодових бітів (Av M ,2Av M ,3Av M ,6Av M ),Av M - введення опорної Запропонований винахід відноситься до галузі лазерних систем і може бути використаний для побудови шестипараметричної лазерної вимірювальної системи (ЛВС), яка забезпечить високі точностиі характеристики вимірювання параметрів руху (ВПР) і стійке кутове автосупроводження літального апарата (ЛА) за умовами використання модернізованого частотно-часового методу (ЧЧМ) вимірювання та вимірювальної інформації від каналу кутових швидкостей у фільтрі нижніх частот (ФНЧ) каналу автоматичного супроводження за напрямком (АСН) Відома квантово-оптична система "Сажень" [1], яка включає канали вимірювання похилої дальності R та кутів азимута а і міста Р У цієї системі забезпечується вимірювання похилої дальності, неоперативне вимірювання кутів азимута і міста по зіркам при супроводженні космічного апарату (КА) за програмою по телевізійним кана лам частоти (Av M Оп) від передавального лазера, змішувачі, фільтри, формувачі імпульсів, формувачі мірних імпульсів, схеми І, лічильники, дешифратор, фазове автопідстроювання частоти на частоті міжмодових бітів, керуючий генератор, опорний генератор з частотою підставлення Av M , електронно-цифрові обчислювальні машини та блоки відображення вимірюваної інформації про радіальну швидкість R' Недоліками системи "Сажень" є мала точність вимірювання дальності на великій відстані до КА та кутів азимута і міста, неоперативність супроводження та неможливість вимірювання кутових швидкостей (тангенціальної складової швидкості) І радіальної швидкості КА Найбільш близьким до запропонованого технічним рішенням, обраним як прототип є "Система автоматичного супроводження ЛА за напрямком на багатомодових лазерах" [2], яка вміщує послідовно з'єднанні лазер з блоком лазерної накачки, селектор подовжніх мод (СПМ), передаючу оптику, прийомну оптику, фотодетектор, резонансні підсилювачі, схеми порівняння (СП), пристрій сигналу похибки (ПСП), виконавчій пристрій (ВП) та додатково може бути доповнена каналами вимірювання похилої дальності R і радіальної швидкості R' Система забезпечує автосупроводження ЛА за напрямком при одночасному вимірюванні R, R' та кутів азимута і міста О 00 (О (О 61680 Недоліком системи-прототипу є те, що поперше в її структурі немає схем вимірювальних каналів, якими вона може бути доповнена, подруге вона не вимірює кутову швидкість ЛА, не використовує цю інформацію для оптимальної фільтрації слабих сигналів відбитих від ЛА з великої дальності, тобто для підвищення СТІЙКОСТІ (астатизму) каналу АСН В основу винаходу поставлена задача створити канал вимірювання радіальної швидкості літальних апаратів на підставі модернізованого частотно-часового методу вимірювання в широкому діапазоні дальностей, починаючи з початкового моменту польоту ЛА Поставлена задача вирішується за рахунок того, що у відому систему-прототип [2], з метою високоточного вимірювання радіальної швидкості ЛА, у складі шестипараметричної ЛВС [3], додатково після СПМ послідовно введено блок дефлекторів, керування яким здійснюється введеними блоком керування дефлекторами та керуючим елементом, після фотодетектору послідовно введено широкосмуговий підсилювач, а замість СП, ПСП та ВП для отримання інформації о радіальної швидкості послідовно введено резонансні підсилювачі настроєні на ВІДПОВІДНІ частоти міжмодових б и т в (Av M ,2Av M ,3Av M ,6Av M ),Av M введення опорної частоти ( A v M o n ) від передаючого лазера, змішувачі, фільтри, формувачі імпульсів, формувачі мірних імпульсів, схеми „і", лічильники, дешифратор, фазова автопідстройка частоти на частоті міжмодових б и т в , керуючий генератор, опорний генератор з частотою підставки Д у п , електронно-цифрові обчислювальні машини та блоки відображення вимірювальної інформації о радіальної швидкості R' Побудова каналу вимірювання радіальної швидкості R' пов'язана з використанням модернізованого ЧЧМ вимірювання, який дозволяє вимірювати всі шість параметрів руху ЛА Пропонуємий канал вимірювання радіальної швидкості може бути доповнений каналами АСН з вимірюванням кутів азимута а і міста р , похилої дальності R та кутових швидкостей а' і р' Суть модернізованого ЧЧМ вимірювання, полягає в тому, що із синхронізованого спектра випромінювання одномодового багаточастотного лазера за допомогою селектора подовжніх мод виділяються необхідні пари частот для "підфарбування" ДС, для створення рівносигнального напрямоку (РСН) у виді 4-х частково перетинаючихся парціальних ДС («підфарбованих» різницевими частотами міжмодових б и т в ) , які на відміну прототипу тепер попарно зустрічне сканують у кожній із двох ортогональних площин, завдяки використання блока дефлекторів Зустрічне сканування пар парціальних ДС у кожній із двох ортогональних площин приводить до зрушення огинаючих періодів пачок імпульсів частот міжмодових биттів за один повний прохід ДС у прямому і зворотному напрямку сканування Це зрушення дає похибки супроводження по кутам, а різниця в тривалості огинаючих - дає похибки кутових швидкостей [3] Зустрічне сканування пар парціальних ДС у кожній із двох ортогональних площин дозволяє також вимірювати з високою точністю похилую дальність до ЛА по запізнюванню частот міжмодових биттів і його радіальну швидкість допплерівським методом, оскільки найкращий режим сканування забезпечується при напівперекритті ДС Високоточні вимірювання радіальної швидкості ЛА можливі завдяки формуванню стабільних ДС Модернізований ЧЧМ вимірювання припускає обробку результатів вимірів у цифровій формі Технічний результат, який може бути отриманий при здійсненні винаходу полягає в високоточному вимірюванні радіальної швидкості ЛА у широкому діапазоні дальностей починаючи з початкового моменту його польоту при понадвузьких ДС Такий канал може бути використаний у складі шести-параметричної ЛВС [3], тобто доповнений каналами АСН з вимірюванням кутів а і р , похилої дальності RTa кутових швидкостей а' і р1 На фіг приведена узагальнена структурна схема запропонованого каналу вимірювання радіальної швидкості літальних апаратів на підставі модернізованого частотно-часового методу вимірювання Запропонований канал вимірювання кутових швидкостей літальних апаратів на підставі модернізованого частотно-часового методу включає КЕ - керуючий елемент, БКД - блок керування дефлекторами, Лн - лазер з накачкою, СПМ - селектор подовжніх мод, БД - блок дефлекторів, ПРДО - передаючу оптику, ПРМО - приймаючу оптику, ФТД - фотодетектор, ШП - широкосмуговий підсилювач, РП - резонансні підсилювачі настроєні на ВІДПОВІДНІ частоти міжмодових биттів, ФІ - формувачі імпульсів, «І» - схеми «і», Лч - лічильники, змішувачі, Ф - фільтри, ФМІ - формувачі мірних імпульсів, ДШ - дешифратор, ФАПЧ фазова автопідстройка частоти на частоті міжмодових биттів, КГ - керуючий генератор, ОГ - опорний генератор з частотою підставки Ду п , ЕЦОМ електронно-цифрові обчислювальні машини та БВІ - блоки відображення інформації, AvM - введення опорної частоти ( A v M o n ) від передаючого лазера У запропонованому каналі вимірювання кутових швидкостей літальних апаратів на підставі модернізованого частотно-часового методу вимірювання всі блоки виконано по відомим схемам [1,2] Робота запропонованого каналу полягає в наступному Зі синхронізованого одномодового багаточастотного спектра випромінювання YAG Nd 3+ - лазера (Лн) за допомогою СПМ виділяються необхідні пари частот для створення РСН завдяки формуванню сумарної ДС у виді 4-х частково перетина-ючихся парціальних ДС («підфарбованих» різницевими частотами міжмодових биттів AvM,2AvM,3AvM,6AvM), ЩО попарно зустрічно сканують у кожній із двох ортогональних площин блоком дефлекторів При цьому період сканування задається блоком керування 61680 дефлекторів, який разом з Лн забезпечується необхідним живленням від керуючого елемента Проходячи через передаючу оптику, лазерний імпульсний сигнал фокусується в скануємі крапки простору, оскільки здійснюється зустрічне сканування двома парами ДС у кожній із двох ортогональних площин (а і р чи X і У) Прийняті прийомною оптикою відбиті від ЛА в процесі сканування чотирьох ДС лазерні імпульсні сигнали і огинаючи сигнали ДС за допомогою фотодетектора перетворяться в електричні імпульсні сигнали на різницевих частотах міжмодових б и т в , посилювані широкосмуговим підсилювачем, і розподіляються по резонансних підсилювачах, побудованим на ВІДПОВІДНІ виходу А керуючого генератора (КГ) подається на вхід змішувача (ЗМ2), де змішується з опорною частотою AvM Сигнал різницевої частоти AvMBIfl-(AvM-vMn), отриманий з виходу Ф2, через формувач імпульсів (ФІ), надходить на схему "І" На лічильник (Лч) проходить пачка імпульсів, обумовлена мірним інтервалом від формувача (ФМІ) Виділене дешифратором (ДШ) КІЛЬКІСТЬ рахункових імпульсів пропорційне частоті vM п , перетвориться в ЕЦОМ у цифроаналоговий сигнал, що у цифровому виді відображає радіальну швидкість ЛА на цифровому табло блоку відображення інформації Джерела інформації 1 Тюрін С В , Шостко І С , Романюк В А , Пономарьов В В , Павлович Р В ПОЛІГОННІ лазерні та оптико-електронні вимірювальні засоби Конспект лекцій Частина II -X ХВУ -1998р -174с 2 Рондин Ю П , Коломийцев А В Система автоматического сопровождения объекта по направлению на многомодовых лазерах //Информационные системы Вып - 1(5) - X НАНУ, ПАНИ, ХВУ -1997 -С 35-39 3 Алешин Г В , Коломийцев А В , Боровик А В Проблемы создания высокоточной лазерной шестипараметрической системы нового поколения на основе модернизированного частотновременного метода измерений //Системи обробки інформації Вип - 4(20) - X ПАНУ, ПАНИ, ХВУ -2002 -С 145-149 частоти AvM,2AvM,3AvM,6AvM При цьому імпульсні сигнали радіочастоти, що надходять з РП1 ( Р П Д У М ) - формує сигнал радіальної швидкості, а РП2 (РП2Ду м ), РПЗ (РПЗДу м ) і РП 4 ( Р П Д У М ) - фор мують сигнали для інших вимірювальних каналів ЛВС На перший змішувач (ЗМ1), подається відбитий сигнал із частотою Av M B I f l , який змішується через зворотній зв'язок зі сумішшю частот AvM о т р + v M n , від керуючого генератора (КГ) та фільтрується (Ф1) У фазовій автопідстройкі частоти (ФАПЧ) на частоті міжмодових б и т в цей сигнал змішується з частотою v n від опорного генератору Отриманий сигнал з частотою Av r з ЗМ1 Ф1 кг Ф2 ФІ ог г «І» t -*Лч ФМІ (Oty дш 4 ьш t-ЕЦОМ До інших вимірювальних каналів Фіг. 1 Комп'ютерна верстка Т Чепелєва Підписне Тираж39 прим Міністерство освіти і науки України Державний департамент інтелектуальної власності, Львівська площа, 8, м Київ, МСП, 04655, Україна ДП "Український інститут промислової власності", вул Сім'ї Хохлових, 15, м Київ, 04119
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for measuring radial velocity of an aircraft by the improved frequency-time method
Автори англійськоюAlioshyn Hennadii Vasyliovych, Kolomiitsev Oleksii Volodymyrovych, Pashkov Dmytro Pavlovych
Назва патенту російськоюСистема для измерения радиальной скорости летательного аппарата с помощью усовершенствованного частотно-временного метода
Автори російськоюАлешин Геннадий Васильевич, Коломийцев Алексей Владимирович, Пашков Дмитрий Павлович
МПК / Мітки
МПК: G01S 17/42
Мітки: частотно-часового, апаратів, вимірювання, швидкості, канал, основі, радіальної, методу, літальних, модернізованого
Код посилання
<a href="https://ua.patents.su/3-61680-kanal-vimiryuvannya-radialno-shvidkosti-litalnikh-aparativ-na-osnovi-modernizovanogo-chastotno-chasovogo-metodu-vimiryuvannya.html" target="_blank" rel="follow" title="База патентів України">Канал вимірювання радіальної швидкості літальних апаратів на основі модернізованого частотно-часового методу вимірювання</a>
Канал автоматичного супроводження літальних апаратів за напрямком на підставі модернізованого частотно-часового методу вимірювання
Номер патенту: 59115
Опубліковано: 15.08.2003
Автори: Коломійцев Олексій Володимирович, Альошин Геннадій Васильович, Пашков Дмитро Павлович
МПК: G01S 17/42, G01S 17/66
Мітки: методу, автоматичного, підставі, напрямком, частотно-часового, вимірювання, супроводження, літальних, апаратів, модернізованого, канал
Формула / Реферат:
Канал автоматичного супроводження літальних апаратів (ЛА) за напрямком на підставі модернізованого частотно-часового методу, що містить послідовно включені лазер з накачкою, селектор подовжніх мод (СПМ), передавальну оптику, приймальну оптику, фотодетектор, резонансні підсилювачі, схеми порівняння (СП) амплітуд, фільтри (підсилювачі) сигналів похибок та виконавчі пристрої керування кутами азимута і місця, який відрізняється тим, що ...
Високоточна лазерна шестипараметрична система на основі модернізованого частотно-часового метода вимірювання
Номер патенту: 58392
Опубліковано: 15.07.2003
Автори: Коломійцев Олексій Володимирович, Пашков Дмитро Павлович, Альошин Геннадій Васильович
МПК: G01S 17/42, G01S 17/66
Мітки: лазерна, шестипараметрична, основі, система, вимірювання, модернізованого, високоточна, частотно-часового, метода
Формула / Реферат:
Високоточна лазерна шестипараметрична система на основі модернізованого частотно-часового методу вимірювання, що містить послідовно включені лазер з накачкою, селектор подовжніх мод (СПМ), передавальну оптику, приймальну оптику, фотодетектор, резонансні підсилювачі, схеми порівняння амплітуд (СП), фільтри (підсилювачі) сигналів похибок та виконавчі пристрої керування кутами азимуту і місця, яка відрізняється тим, що додатково після СПМ...
Кореляційно-фазовий вимірювач радіальної швидкості цілі
Номер патенту: 48844
Опубліковано: 15.08.2002
Автори: Фик Олександр Ілліч, Челпанов Артем Володимирович, Карлов Володимир Дмитрович, Стахєєв Микола Олександрович, Савченко Микола Павлович, Коваль Олександр Андрійович
МПК: G01S 13/00, G01S 13/52
Мітки: цілі, швидкості, вимірювач, кореляційно-фазовий, радіальної
Формула / Реферат:
Кореляційно-фазовий вимірювач радіальної швидкості цілі, який містить: блок вимірювання фази, генератор опорних функцій фази, розв'язуючий блок, який відрізняється тим, що додатково введено запам'ятовуючий пристрій (ЗП), блок обчислення різниці фаз, блок грубої оцінки, блок вагової обробки і блок усунення неоднозначності, причому блоки вимірювання фази, ЗП, корелятор, розв'язуючий блок, блок вагової обробки та блок усунення неоднозначності...
Пристрій для вимірювання дальності та радіальної швидкості
Номер патенту: 15338
Опубліковано: 30.06.1997
Автори: Самуль Юрій Володимирович, Челпанов Володимир Валентинович
МПК: G01S 13/00
Мітки: вимірювання, радіальної, пристрій, дальності, швидкості
Формула / Реферат:
Устройство для измерения дальности и радиальной скорости, содержащее последовательно соединенные приемную антенну, приемник, фазовый детектор, блок фазоизмерителей и блок индикации, а также последовательно соединенные опорный генератор, передатчик и передающую антенну, причем первый выход опорного генератора дополнительно соединен со вторым входом фазового детектора, а второй выход -с вторым входом блока фазоизмерителей, отличающееся тем, что...
Спосіб вимірювання радіальної швидкості цілі для секвентного радіолокатора
Номер патенту: 17468
Опубліковано: 06.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 13/06
Мітки: вимірювання, радіолокатора, швидкості, радіальної, цілі, спосіб, секвентного
Формула / Реферат:
Способ измерения радиальной скорости цели для секвентного радиолокатора, заключающийся в излучении зондирующего сигнала в виде периодической последовательности наносекундных видеоимпульсов без несущей частоты и приеме эхо-сигналов, отраженных от движущейся цели, отличающийся тем, что выбирают частоту следования зондирующих видеоимпульсов значительно больше максимальной допплеровской частоты на верхней частоте спектра излучаемого сигнала,...
Попередній патент: Спосіб вирощування гібридного насіння соняшнику
Наступний патент: Спосіб діагностики ішемічної хвороби серця
Випадковий патент: Конструкція накладного нігтя або кінчика нігтя, що містить кілька частин, та спосіб її одержання