Підвісна операторська дорога
Номер патенту: 2839
Опубліковано: 26.12.1994
Автори: Кокуш Анатолій Якимович, Тищенко Борис Борисович, Поповський Юрій Миколайович, Горбаренко Григорій Васильович, Золотарьов Олексій Олександрович
Формула / Реферат
Подвесная операторская дорога, содержащая подвесной направляющий элемент с системой натяжки, каретку с кинокамерой, приводом движения каретки и элементами вспомогательного оборудования, отличающаяся тем, что, с целью расширения функциональных возможностей за счет увеличения диапазона перемещения, подвесной направляющий элемент выполнен в виде набора разъемных отрезков цепи, соединенных между собой замками и закрепленных на узлах подвеса, причем участки поворота направляющего элемента выполнены в виде жестких профилей, к которым прикреплены отрезки цепей, а каретка содержит две несущие звездочки, установленные с возможностью произвольного поворота вокруг вертикальной оси, и транспортирующую звездочку, связанную с приводом движения каретки.
Текст
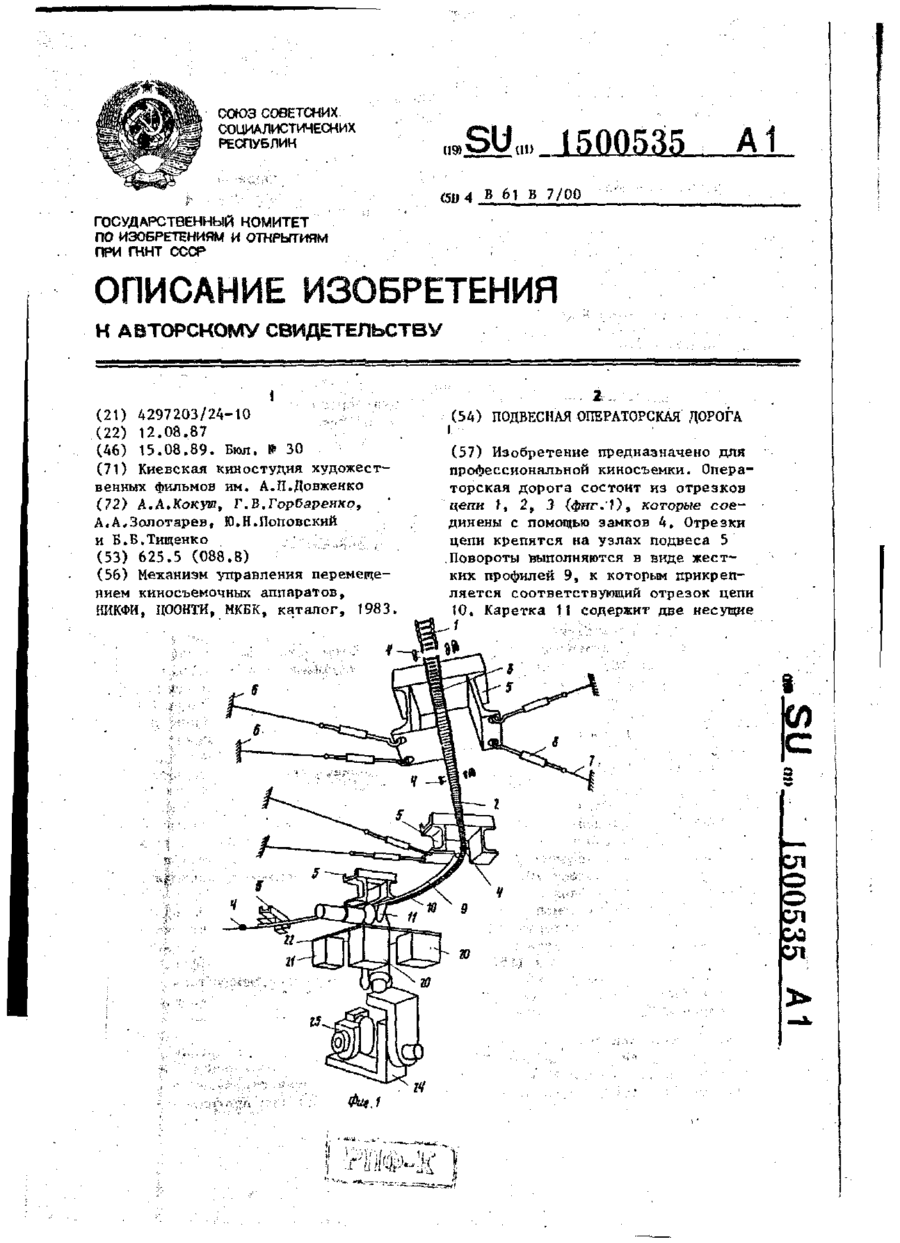
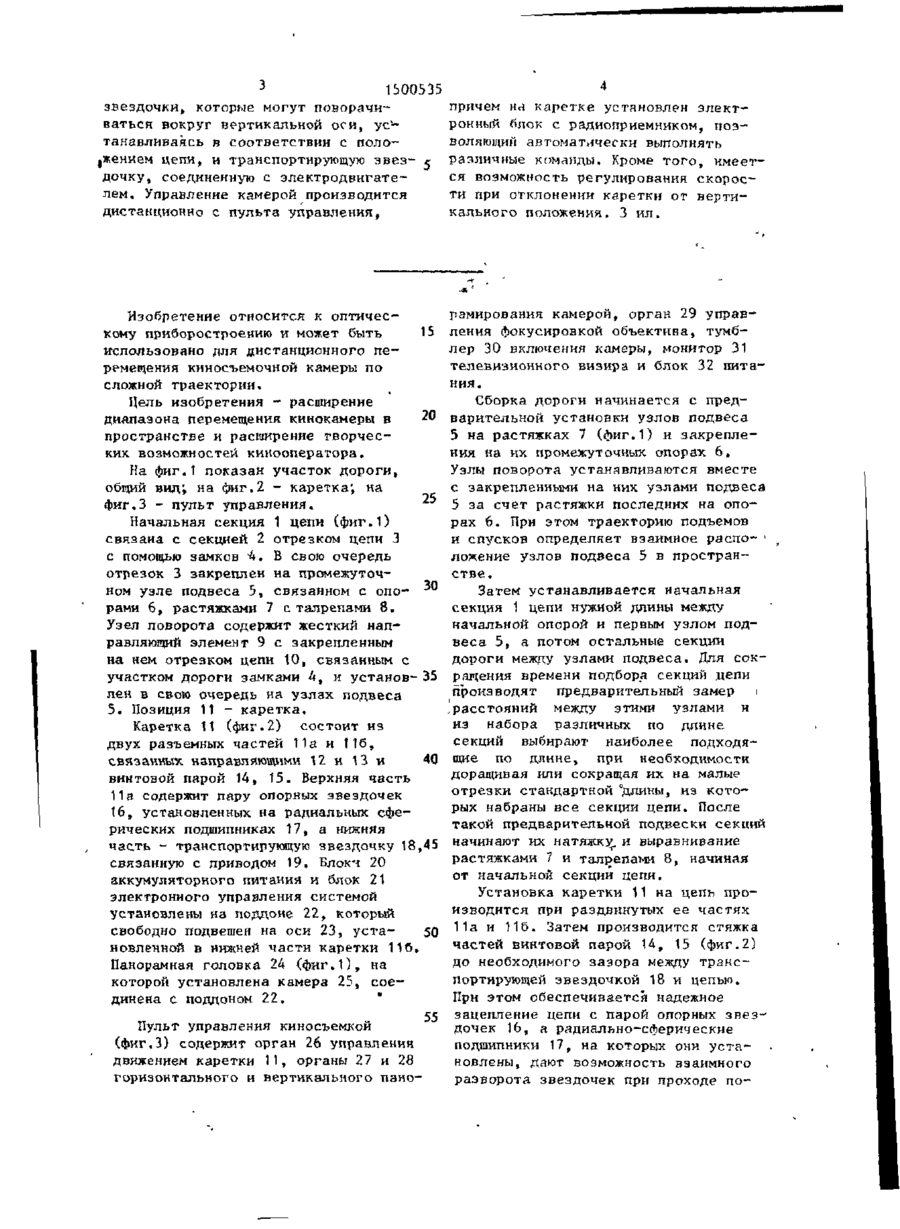
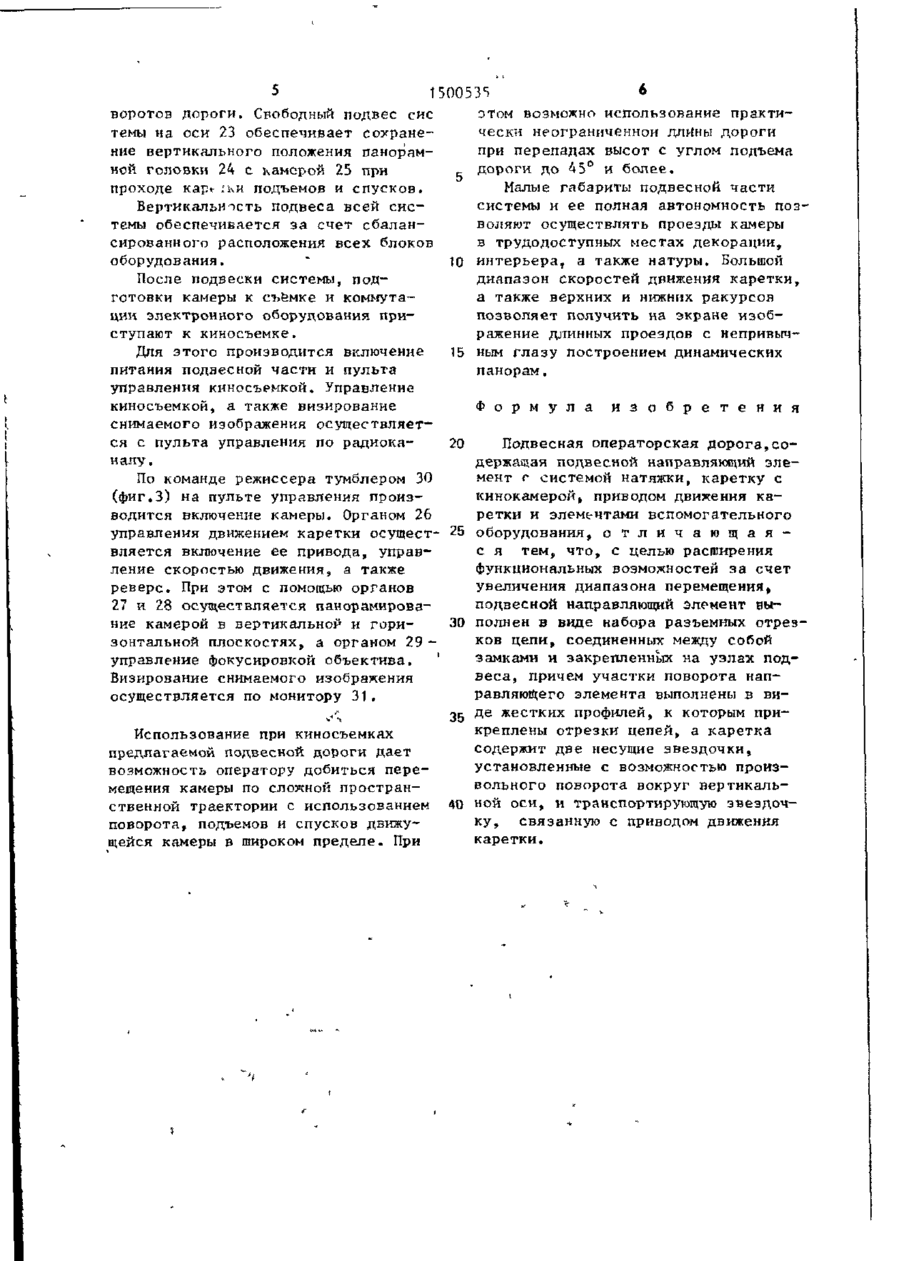
Изобретение предназначено для профессиональной киносъемки. Операторская дорога состоит из отрезков цепи I, 2f 3 (фиг.О, которые соединены с помощью замков 4, Отрезки цепи крепятся на узлах подвеса 5 Повороты выполняются в виде жестких профилей 9, к которым прикрепляется соответствующий отрезок цепи 10. Каретка 1! содержит две несущие 1 : о о СП 3 1ЬОО535 звездочки, которые могут поворачиваться вокруг вертикальной оси, устанавливаясь в соответствии с положением цепи, и транспортирующую звез- с дочку, соединенную с электродвигателем. Управление камерой производится дистанционно с пульта управления, Изобретение относится к оптичес15 кому приборостроению и может быть использовано для дистанционного перемещения киносъемочной камеры по сложной траектории. Цель изобретения - расширение 20 диапазона перемещения кинокамеры в пространстве и расширение творческих возможностей кинооператора. На фиг.1 показан участок дороги, общий вид; на фиг.2 - каретка; на 25 фиг.З - пульт управления. Начальная секция 1 цепи (фиг.1) связана с секцией 2 отрезком цепи 3 с помощью замков -4. В свою очередь отрезок 3 закреплен на промежуточном узле подвеса 5, связанном с опо- 30 рами 6, растяжками 7 с талрепами 8. Узел поворота содержит жесткий направляющий элемент 9 с закрепленным на нем отрезком цепи 10, связанным с участком дороги замками 4, и установ- 35 лен в свою очередь на узлах подвеса 5. Позиция 11 - каретка. Каретка 11 (фиг.2) состоит из двух разъемных частей 11а и 116, связанных направляющими 12 и 13 и 40 винтовой парой 14, 15. Верхняя часть 11а содержит пару опорных звездочек 16, установленных на радиальных сферических подшипниках 17, а нижняя часть - транспортирующую звездочку 18, 45 связанную с приводом 19. Блокч 20 аккумуляторного питания и блок 21 электронного управления системой установлены на поддоне 22, который свободно подвешен на оси 23, уста50 новленной в нижней части каретки 116. Панорамная головка 24 (фиг.1), на которой установлена камера 25, соединена с поддоном 22, " причем на каретке установлен электронный блок с радиоприемником, позволяющий автоматически выполнять различные команды. Кроме того, имеется возможность регулирования скорости при отклонении каретки от вертикального положения. 3 ил. рамирования камерой, орган 29 управ-* ления фокусировкой объектива, тумблер 30 включения камеры, монитор 31 телевизионного визира и блок 32 питания. Сборка дороги начинается с предварительной установки узлов подвеса 5 на растяжках 7 (фиг.1) и закрепления на их промежуточных опорах 6, Узлы поворота устанавливаются вместе с закрепленными на них узлами подвеса 5 за счет растяжки последних на опорах 6. При этом траекторию подъемов и спусков определяет взаимное распо- > ложение узлов подвеса 5 в пространстве. Затем устанавливается начальная секция 1 цепи нужной длины между начальной опорой и первым узлом подвеса 5, а потом остальные секции дороги между узлами подвеса. Для сокращения времени подбора секций цепи производят предварительный замер і і .расстоянии между этими узлами и из набора различных по длине секций выбирают наиболее подходяиие по длине, при необходимости доращивая или сокращая их на малые отрезки стандартной "длины, из которых набраны все секции цепи. После такой предварительной подвески секций начинают их натяжку^, и выравнивание растяжками 7 и талрепами 8, начиная от начальной секции цепи. Установка каретки 11 на цепь производится при раздвинутых ее частях 11а и 116. Затем производится стяжка частей винтовой парой 14, 15 (фиг.2) до необходимого зазора между транспортирующей звездочкой 18 и цепью. При этом обеспечивается надежное 55 зацепление цепи с парой опорных звезПульт управления киносъемкой дочек 16, а радиально-сферические (фиг.З) содержит орган 26 управления подшипники 17, на которых они устадвижением каретки 11, органы 27 и 28 новлены, дают возможность взаимного горизонтального и вертикального паноразворота звездочек при проходе по 6 5 t 5O053S этом возможно использование практиворотов дороги. Свободный подвес сие чески неограниченной длины дороги темы на оси 23 обеспечивает сохранение вертикального положения панорампри перепадах высот с углом подъема ной головки 24 с камерой 25 при дороги до 45° и более. ц проходе кар*- :ки подъемов и спусков. Малые габариты подвесной части системы и ее полная автономность позВертикальность подвеса всей сисволяют осуществлять проезды камеры темы обеспечивается за счет сбаланв трудодоступньгх местах декорации, сированного расположения всех блоков оборудования. 10 интерьера, а также натуры. Большой После подвески системы, поддиапазон скоростей движения каретки, готовки камеры к съёмке и коммутаа также верхних и нижних ракурсов ции электронного оборудования припозволяет получить на экране изобступают к киносъемке. ражение длинных проездов с непривычДля этого производится включение 15 ным глазу построением динамических питания подвесной части и пульта панорам. управления киносъемкой» Управление киносъемкой, а также визирование Ф о р м у л а и з о б р е т е н и я снимаемого изображения осуществляется с пульта управления по радиока20 Подвесная операторская дорога,соналу. держащая подвесной направляющий элеПо команде режиссера тумблером 30 мент г системой натяжкиt каретку с (фиг.З) на пульте управления произкинокамерой» приводом движения каводится включение камеры. Органом 26 ретки и элементами вспомогательного управления движением каретки осущест- 25 оборудования, о т л и ч а ю щ а я вляется включение ее привода, управс я тем, что, с целью расширения ление скоростью движения, а также функциональных возможностей за счет реверс. При этом с помощью органов увеличения диапазона перемещения, 27 и 28 осуществляется панорамироваподвесной направляющий элемент выние камерой в вертикальной и гори30 полнен в виде набора разъемных отреззонтальной плоскостях, а органом 29 ков цепи, соединенных между собой управление фокусировкой объектива. замками и закрепленных на узлах подВизирование снимаемого изображения веса, причем участки поворота напосуществляется по монитору 31, равляющего элемента выполнены в виде жестких профилей, к которым при» " і креплены отрезки цепей, а каретка Использование при киносъемках содержит две несущие звездочки, предлагаемой подвесной дороги дает установленные с возможностью произвозможность оператору добиться перевольного поворота вокруг вер тикальмещения камеры по сложной пространственной траектории с использованием 40 ной оси, и транспортирующую звездочку, связанную с приводом движения поворота, подъемов и спусков движукаретки. щейся камеры в широком пределе. При
ДивитисяДодаткова інформація
Назва патенту англійськоюOperator's telpherage
Автори англійськоюKokush Anatolii Yakymovych, Horbarenko Hryhorii Vasyliovych, Zolotariov Oleksii Oleksandrovych, Popovskyi Yurii Mykolaiovych, Tyschenko Borys Borysovych
Назва патенту російськоюПодвесная операторская дорога
Автори російськоюКокуш Анатолий Акимович, Горбаренко Григорий Васильевич, Золотарев Алексей Александрович, Поповский Юрий Николаевич, Тищенко Борис Борисович
МПК / Мітки
МПК: B61B 7/00
Мітки: операторська, дорога, підвісна
Код посилання
<a href="https://ua.patents.su/4-2839-pidvisna-operatorska-doroga.html" target="_blank" rel="follow" title="База патентів України">Підвісна операторська дорога</a>
Штовхач верхньої дії тунелепрохідницького комплексу
Номер патенту: 1534
Опубліковано: 25.07.1994
Автори: Забосин Володимир Віталійович, Стародубцев Євген Іванович, Зенін Костянтин Михайлович, Мірошников Юрій Миколайович
МПК: E21F 13/02
Мітки: комплексу, тунелепрохідницького, верхньої, штовхач, дії
Формула / Реферат:
1. Толкатель верхнего действия тоннелепроходческого комплекса, включающий направляющие, установленную на них каретку с толкающим органом, закрепленным шарнирно и взаимодействующим с вагонеткой, и привод перемещения каретки, отличающийся тем, что, с целью уменьшения габаритов толкателя, привод перемещения каретки выполнен в виде гидроцилиндра с двумя штоками и общим поршнем, причем концы штока закреплены на направляющих, а корпус...
Захоплювач вантажника
Номер патенту: 1886
Опубліковано: 20.12.1994
Автори: Козлинський Мирослав Петрович, Прищенко Олег Васильович
МПК: B66F 9/06
Мітки: захоплювач, вантажника
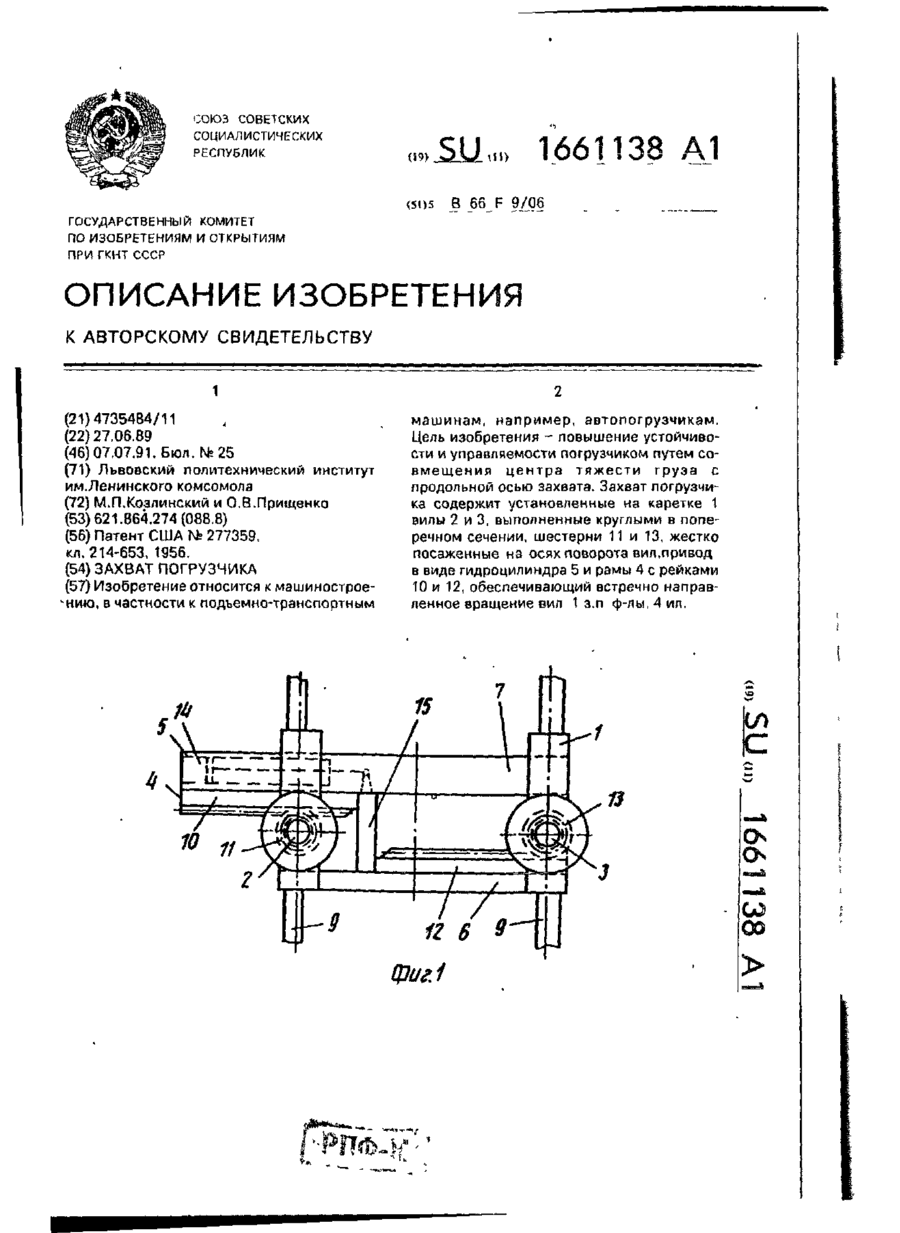
Формула / Реферат:
1. Захват погрузчика, содержащий пару вил круглого сечения, каждая из которых смонтирована на каретке последнего с возможностью вращения вокруг своей продольной оси, отличающийся тем, что, с целыегквышаэия устойчивости и управляемости погрузчиком путем совмещения центра тяжести груза с продольной осью захвата, вилы смонтированы с возможностью синхронного вращения приводом навстречу друг другу.2. Захват по п. 1, отличающийся тем,...
Пристрій для тренування гірськолижників

Номер патенту: 1519
Опубліковано: 25.07.1994
Автори: Васильчук Анатолій Леонідович, Панарін Борис Георгійович
МПК: A63B 69/18
Мітки: гірськолижників, пристрій, тренування
Формула / Реферат:
1. Устройство для тренировки горнолыжников, содержащее размещенное на станине и обращенное выпуклостью вверх дугообразное основание, установленные в его направляющих каретки с поворотными опорными площадками для ног, и упругие элементы, отличающееся тем, что, с целью повышения эффективности тренировки путем отработки техники ведения поворота и кантования, каждая опорная площадка выполнена составной по высоте из двух подпружиненных и...
Установка для обробки зовнішньої поверхні труб
Номер патенту: 267
Опубліковано: 30.04.1993
Автори: Третяков Клавдій Федорович, Дрягін Дмитро Прокопович, Івченко Лариса Василівна
МПК: B08B 9/02
Мітки: труб, поверхні, зовнішньої, установка, обробки
Формула / Реферат:
Установка для обработки наружной поверхности труб, включающая механизм перемещения изделия, содержащий два параллельных ряда опорных роликов, установленных под углом к направлению перемещения изделия, и приводные ролики и последовательно расположенные узел очистки, включающий щетку, и механизм для сбрасывания обработанных изделий, отличающаяся тем, что она снабжена узлом изоляции, расположенным после узла очистки, Включающим закрепленное на...
Пристрій для переміщення і передачі виробів
Номер патенту: 338
Опубліковано: 30.04.1993
Автори: Бурлика Анатолій Пилипович, Гелев Георгій Наумович, Ларіонов Михайло Тихонович, Фрідман Роман Аркадійович, Кундін Станіслав Ісакович
МПК: B65G 47/53
Мітки: переміщення, виробів, пристрій, передачі
Формула / Реферат:
Ф о р м у л а и з о б р е т е н и я 1. Устройство для перемещения и передачи изделий, включающее подающий конвейер, консольно расположенный рольганг с приводом поворота в вертикальной плоскости и путевым переключателем управления последним и приемный конвейер в виде параллельно расположенных между роликами рольганга приводных элементов, о т л и ч а ю щ е е с я тем, что, с целью повышения надежности работы устройства, оно снабжено...
Попередній патент: Універсальний плечовий штатив для кінозйомочної камери
Наступний патент: Бетоноукладальник
Випадковий патент: Спосіб автоматизованого пошуку інформації у сфері нерухомості