Захоплювач вантажника
Номер патенту: 1886
Опубліковано: 20.12.1994
Автори: Прищенко Олег Васильович, Козлинський Мирослав Петрович
Формула / Реферат
1. Захват погрузчика, содержащий пару вил круглого сечения, каждая из которых смонтирована на каретке последнего с возможностью вращения вокруг своей продольной оси, отличающийся тем, что, с целыегквышаэия устойчивости и управляемости погрузчиком путем совмещения центра тяжести груза с продольной осью захвата, вилы смонтированы с возможностью синхронного вращения приводом навстречу друг другу.
2. Захват по п. 1, отличающийся тем, что указанный привод образован смонтированной на каретке с возможностью поперечного перемещения силовым цилиндром рамой с двумя рейками и жестко закрепленными на вилах с возможностью взаимодействия с последними шестернями, причем рейки расположены с разных сторон рамы.
Текст
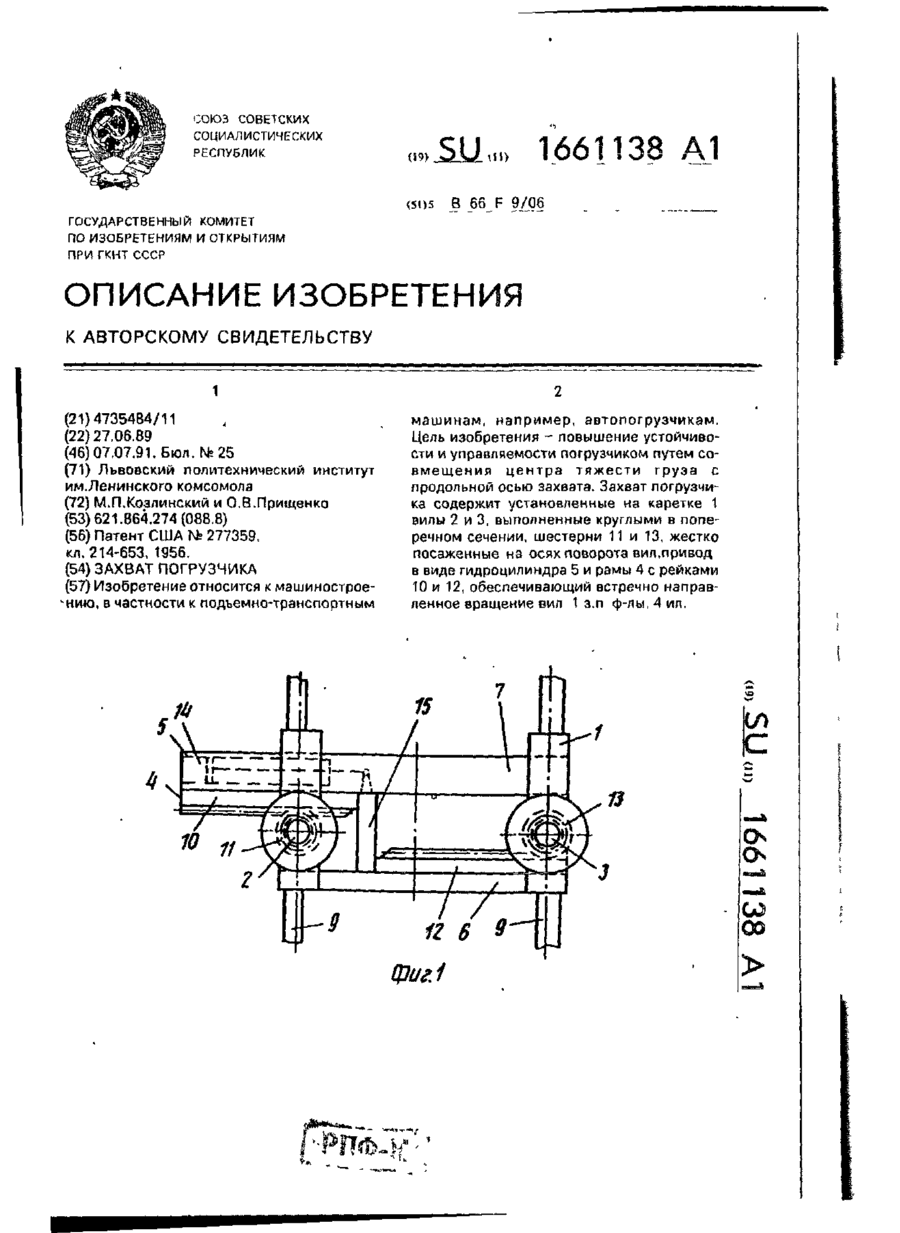
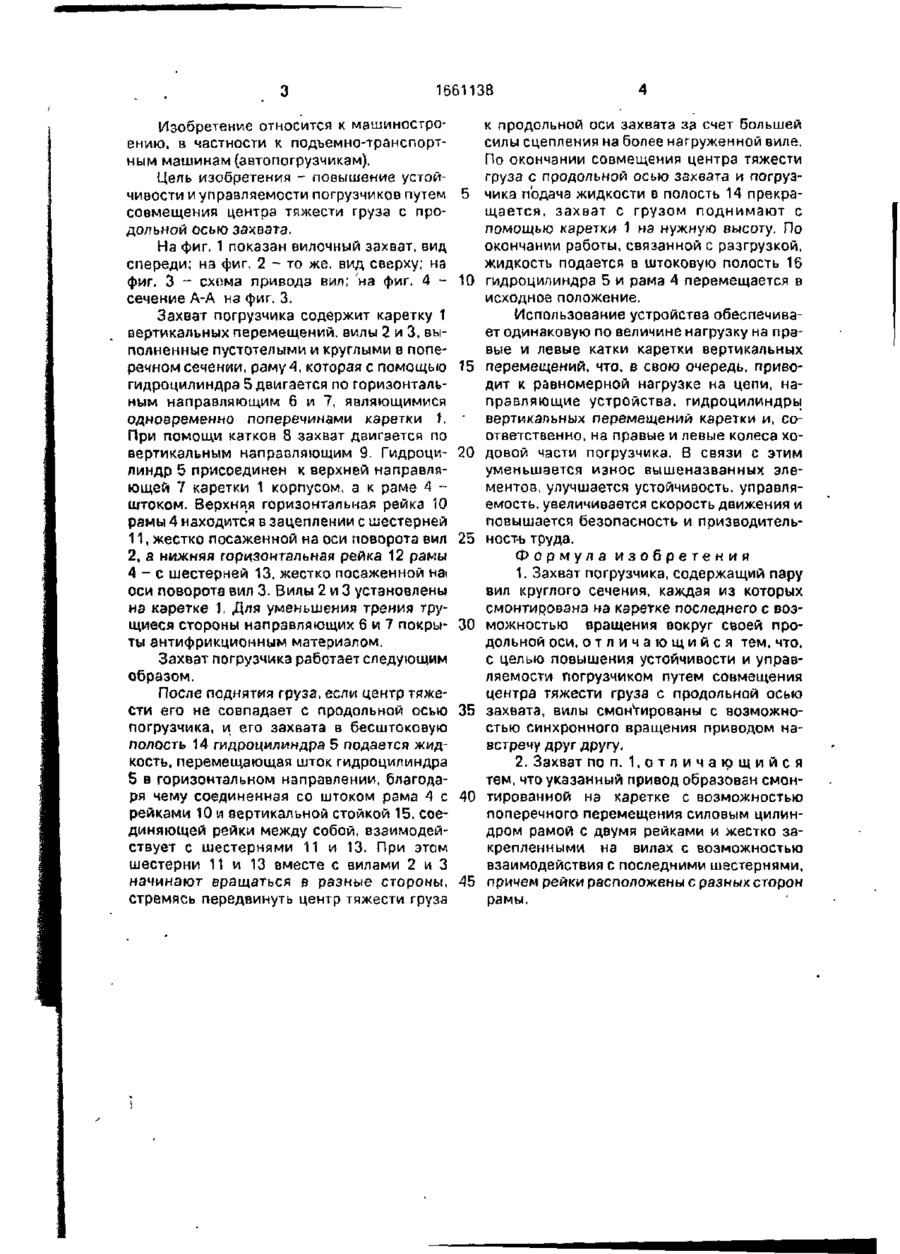
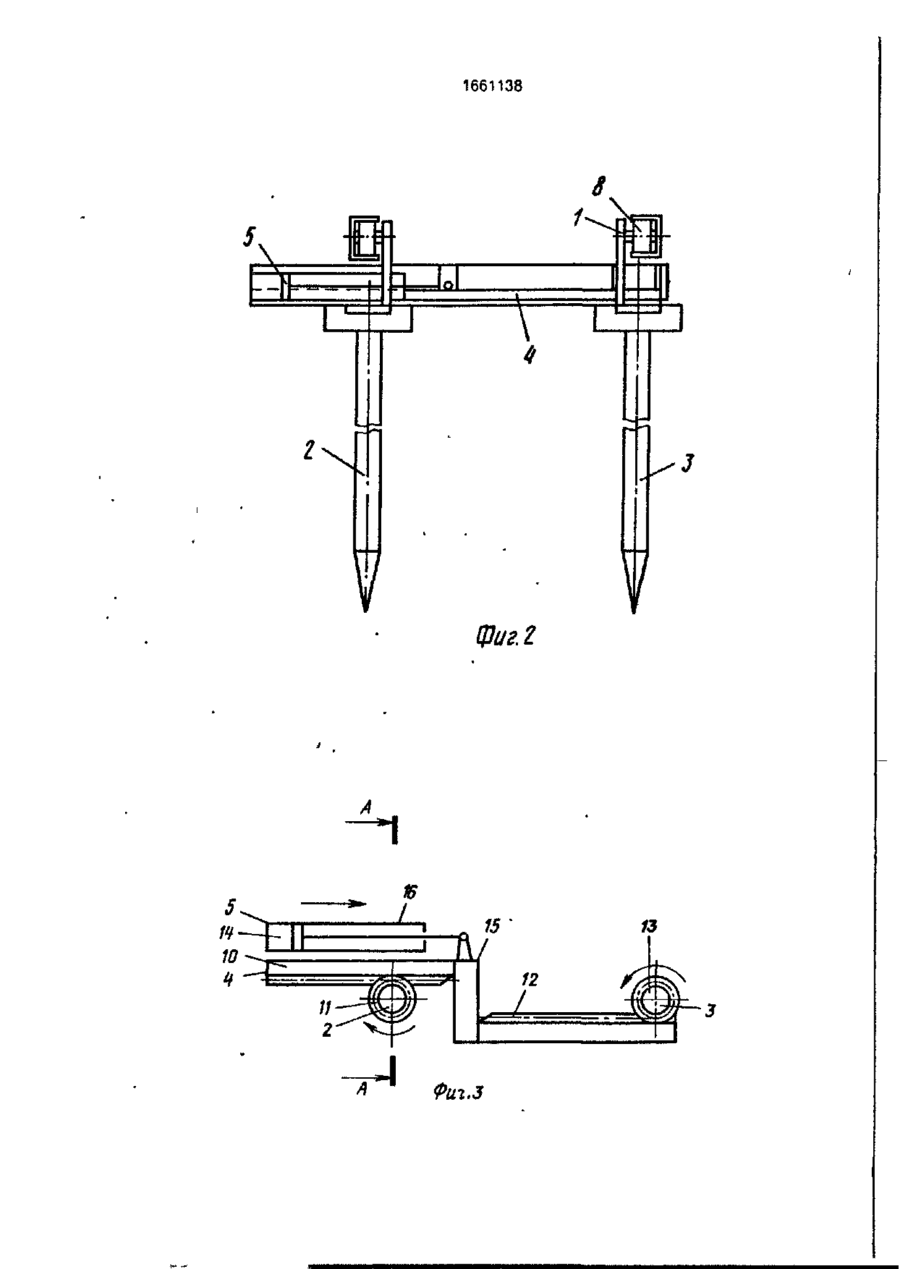
Изобретение относится к машиностроению, в частности к подъемно-транспортным U. _ " машинам, например, автопогрузчикам. Цель изобретения - повышение устойчивости и управляемости погрузчиком путем совмещения центра тяжести груза с продольной осью захвата. Захват погрузчика содержит установленные на каретке 1 вилы 2 и 3, выполненные круглыми в поперечном сечении, шестерни 11 и 13, жестко посаженные на осях поворота вил.привод в виде гидроцилиндра 5 и рамы 4 с рейками 10 и 12, обеспечивающий встречно направленное вращение вил 1 з.п ф-лы, 4 ил. 1661138 Изобретение относится к машиностроению, в частности к подьемно-транспортным машинам (автопогрузчикам). Цель изобретения - повышение устойчивости и управляемости погрузчиков путем совмещения центра тяжести груза с продольной осью захвата. На фиг. 1 показан вилочный захват, вид спереди; на фиг. 2 - то же, вид сверху; на фиг, 3 - схема привода вил; на фиг, 4 сечение А-А на фиг. 3. Захват погрузчика содержит каретку 1 вертикальных перемещений, вилы 2 и 3, выполненные пустотелыми и круглыми 8 поперечном сечении, раму А, которая с помощью гидроцилиндра 5 двигается по горизонтальным направляющим 6 и 7, являющимися одновременно поперечинами каретки t. При помощи катков 8 захват двигается по вертикальным направляющим 9. Гидроцилиндр 5 присоединен к верхней направляющей 7 каретки 1 корпусом, а к раме 4 штоком. Верхняя горизонтальная рейка 10 рамы 4 находится в зацеплении с шестерней 11, жестко посаженной на оси поворота вил 2, а ышкняя горизонтальная рейка 12 рамы 4 - е шестерней 13, жестко посаженной на оси поворота вил 3. Вилы 2 и 3 установлены на каретке 1. Для уменьшения трения трущиеся стороны направляющих 6 и 7 покрыты антифрикционным материалом. Захват погрузчика работает следующим образом. После поднятия груза, если центр тяжести его не совпадает с продольной осью погрузчика, и его захвата в бесштоковую полость 14 гидроцилиндра 5 подается жидкость, перемещающая шток гидроцилиндра 5 в горизонтальном направлении, благодаря чему соединенная со штоком рама 4 с рейками 10 и вертикальной стойкой 15, соединяющей рейки между собой, взаимодействует с шестернями 11 и 13. При этом шестерни 11 и 13 вместе с вилами 2 и 3 начинают вращаться в разные стороны, стремясь передвинуть центр тяжести груза 5 10 15 20 25 30 35 40 45 к продольной оси захвата за счет большей силы сцепления на более нагруженной виле. По окончании совмещения центра тяжести груза с продольной осью захвата и погрузчика подача жидкости в полость 14 прекращается, захват с грузом поднимают с помощью каретки 1 на нужную высоту. По окончании работы, связанной с разгрузкой, жидкость подается в штоковую полость 16 гидроцилиндра 5 и рама 4 перемещается в исходное положение. Использование устройства обеспечивает одинаковую по величине нагрузку на правые и левые катки каретки вертикальных перемещений, что, в свою очередь, приводит к равномерной нагрузке на цепи, направляющие устройства, гидроцилиндры вертикальных перемещений каретки и, соответственно, на правые и левые колеса ходовой части погрузчика. В связи с этим уменьшается износ вышеназванных элементов, улучшается устойчивость, управляемость, увеличивается скорость движения и повышается безопасность и призводительность труда. Формула изобретения 1. Захват погрузчика, содержащий пару вил круглого сечения, каждая из которых смонтирована на каретке последнего с воэможностью вращения вокруг своей продольной оси, о т л и ч а ю щ и й с я тем, что, с целью повышения устойчивости и управляемости погрузчиком путем совмещения центра тяжести груза с продольной осью захвата, вилы смонтированы с возможностью синхронного вращения приводом навстречу друг другу. 2. Захват по п. 1 , о т л и ч а ю щ и й с я тем, что указанный привод образован смонтированной на каретке с возможностью поперечного перемещения силовым цилиндром рамой с двумя рейками и жестко закрепленными на вилах с возможностью взаимодействия с последними шестернями, причем рейки расположены с разных сторон рамы. 1661138 \ Щиг. 2 1В I 10 I 15' 12 L Фиг.З 1661138 A-A ФигЛ Редактор М Янкович Составитель В Момот Техред М Моргентал Корректор А Осауленко Заказ 2093 Тираж 425 Подписное ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035 Москва, Ж-35 Раушская наб 4/5 Производственно-издательский комбинат 'Патент" г Ужгород, ул Гагарина 101
ДивитисяДодаткова інформація
Назва патенту англійськоюClaw of loader
Автори англійськоюKozlynskyi Myroslav Petrovych, Pryschenko Oleh Vasyliovych
Назва патенту російськоюЗахват погрузчика
Автори російськоюКозлинский Мирослав Петрович, Прищенко Олег Васильевич
МПК / Мітки
МПК: B66F 9/06
Мітки: вантажника, захоплювач
Код посилання
<a href="https://ua.patents.su/4-1886-zakhoplyuvach-vantazhnika.html" target="_blank" rel="follow" title="База патентів України">Захоплювач вантажника</a>
Вила вантажника

Номер патенту: 986
Опубліковано: 30.12.1993
Автори: Поляков Володимир Миколайович, Ліханській Владлен Сергійович, Куцигін Володимир Дмитрович, Філєвіч Станіслав Анатольович, Махнін Владлен Семенович, Попович Іван Григорович, Сироішко Іван Іванович, Немировський Іван Петрович, Маякін Андрій Васильович, Парайко Михайло Петрович
МПК: B66F 9/06
Мітки: вантажника, вила
Формула / Реферат:
формула изобретения1. Вилы погрузчика, состоящие из горизонтального и вертикального участков, выполненных в поперечном сечении П-образными с полкой и стенками постоянной толщины, и сопрягающего их участка, отличающиеся тем, что, с целью повышения долговечности и снижения металлоемкости, сопрягающий участок выполнен прямоугольного поперечного сечения, высота которого больше толщины полки на остальных участках и выполнена увеличивающейся...
Пристрій для взяття елементів збірного кріплення тунелів
Номер патенту: 1805
Опубліковано: 25.10.1994
Автори: Фішман Йосип Давидович, Зенін Костянтин Михайлович, Мірошников Юрій Миколайович, Омеляненко Володимир Миколайович
МПК: E21D 11/40
Мітки: кріплення, збірного, тунелів, взяття, елементів, пристрій
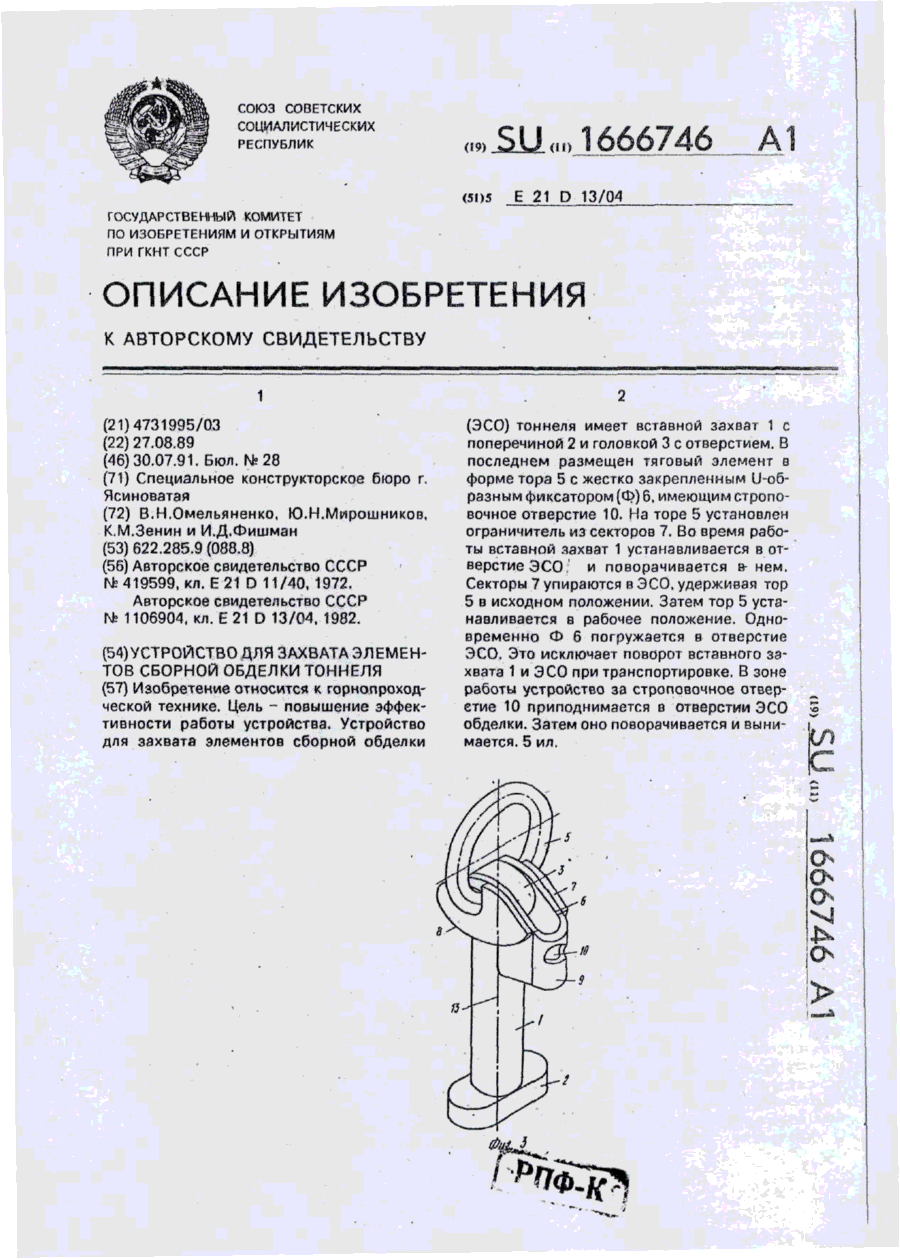
Формула / Реферат:
Устройство для захвата элементов сборной обделки тоннеля, включающее вставной захват с поперечиной и головкой с отверстием, фиксатор и ограничитель, отличающееся тем, что, с целью повышения эффективности работы устройства, оно снабжено тяговым элементом, имеющим форму тора и свободно установленным в отверстии головки, при этом фиксатор выполнен и-образным и жестко закреплен совместно с ограничителем, выполненным в виде сектора, на тяговом...
Штовхач верхньої дії тунелепрохідницького комплексу
Номер патенту: 1534
Опубліковано: 25.07.1994
Автори: Стародубцев Євген Іванович, Зенін Костянтин Михайлович, Забосин Володимир Віталійович, Мірошников Юрій Миколайович
МПК: E21F 13/02
Мітки: штовхач, комплексу, дії, тунелепрохідницького, верхньої
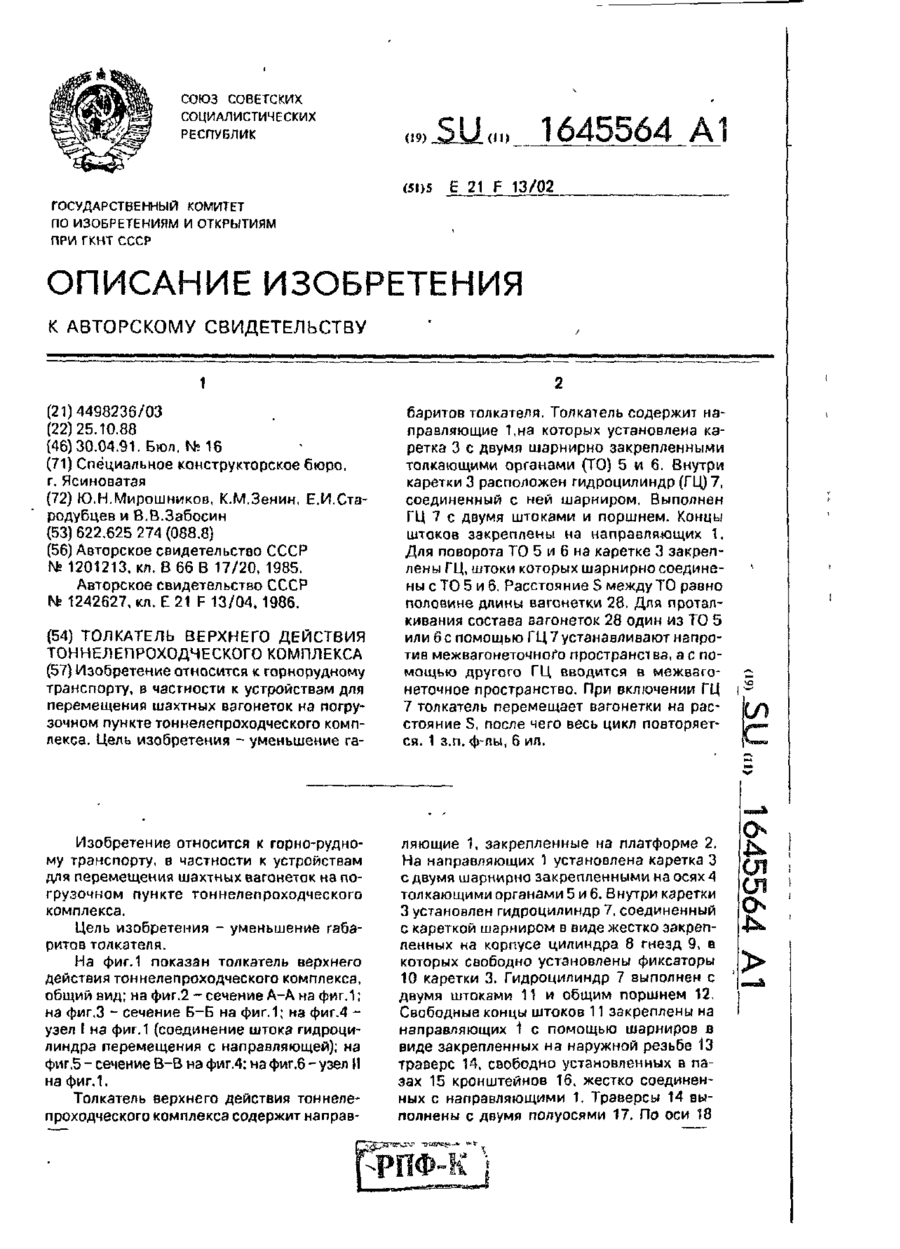
Формула / Реферат:
1. Толкатель верхнего действия тоннелепроходческого комплекса, включающий направляющие, установленную на них каретку с толкающим органом, закрепленным шарнирно и взаимодействующим с вагонеткой, и привод перемещения каретки, отличающийся тем, что, с целью уменьшения габаритов толкателя, привод перемещения каретки выполнен в виде гидроцилиндра с двумя штоками и общим поршнем, причем концы штока закреплены на направляющих, а корпус...
Пристрій для кабельного зв’язку з пересувними об’єктами
Номер патенту: 1730
Опубліковано: 25.10.1994
Автори: Сорока Георгій Митрофанович, Олійник Сергій Леонідович, Парікожка Тетяна Вікторівна
МПК: B66C 13/00
Мітки: пристрій, кабельного, пересувними, об'єктами, зв'язку
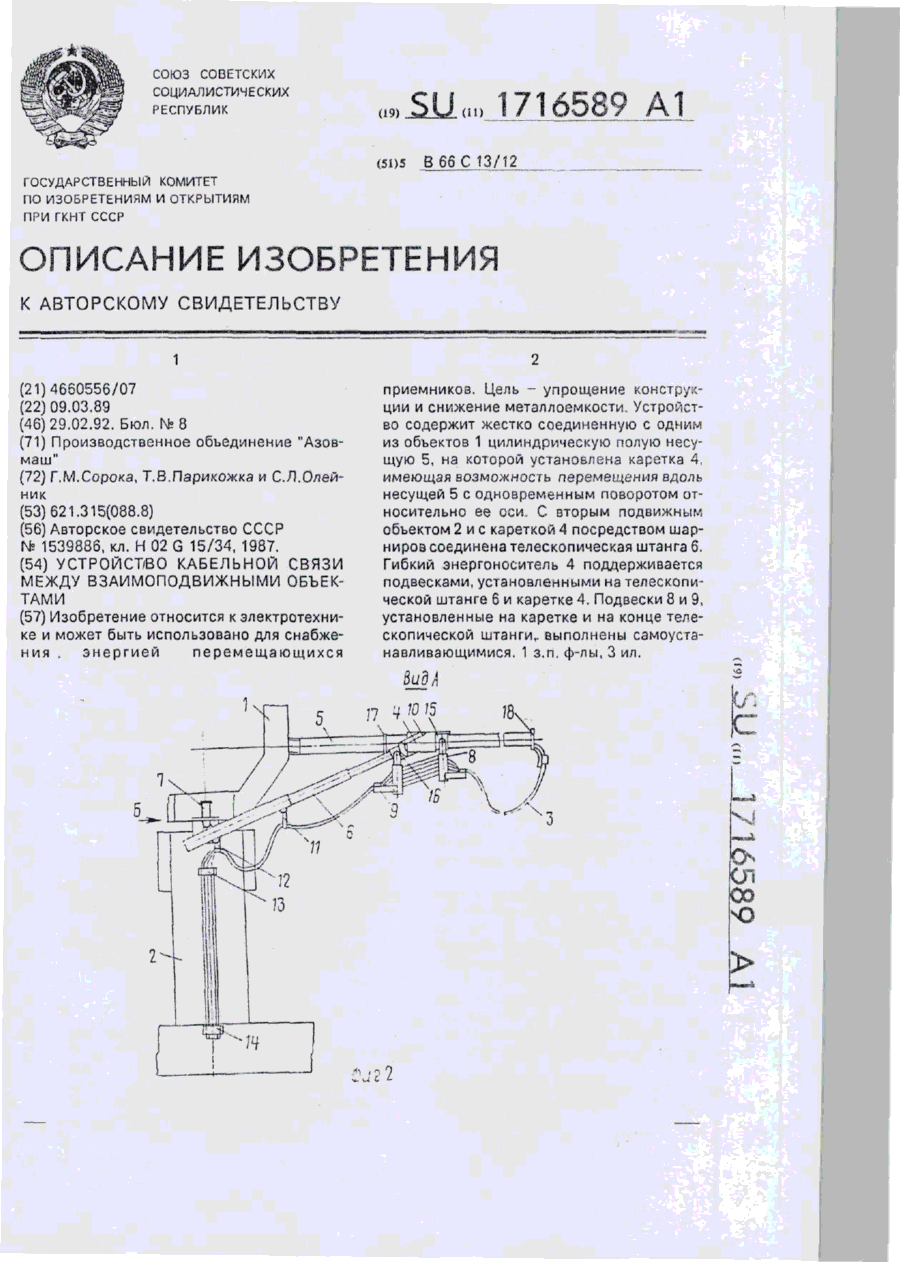
Формула / Реферат:
1. Устройство кабельной связи между взаимоподвижными объектами, содержащее штангу, шарнирно соединенную первым концом с одним из объектов, а вторым — с кареткой, установленной с возможностью перемещения по консольной несущей, жестко соединенной с другим объектом, и гибкие энергоносители, уложенные плоским потоком, последовательно закрепленные на штанге и каретке и проложенные в полости консольной несущей, отличающееся тем, что, с целью...
Зштовхуючий перевантажуючий пристрій для обслуговування транспортного засобу
Номер патенту: 153
Опубліковано: 30.04.1993
Автори: Володарський Віктор Тимофійович, Шнейдер Володимир Львович, Кохан Іван Михайлович, Самонін Анатолій Васильович, Гренадер Михайло Юхимович
МПК: B65G 47/74
Мітки: перевантажуючий, засобу, транспортного, обслуговування, пристрій, зштовхуючий
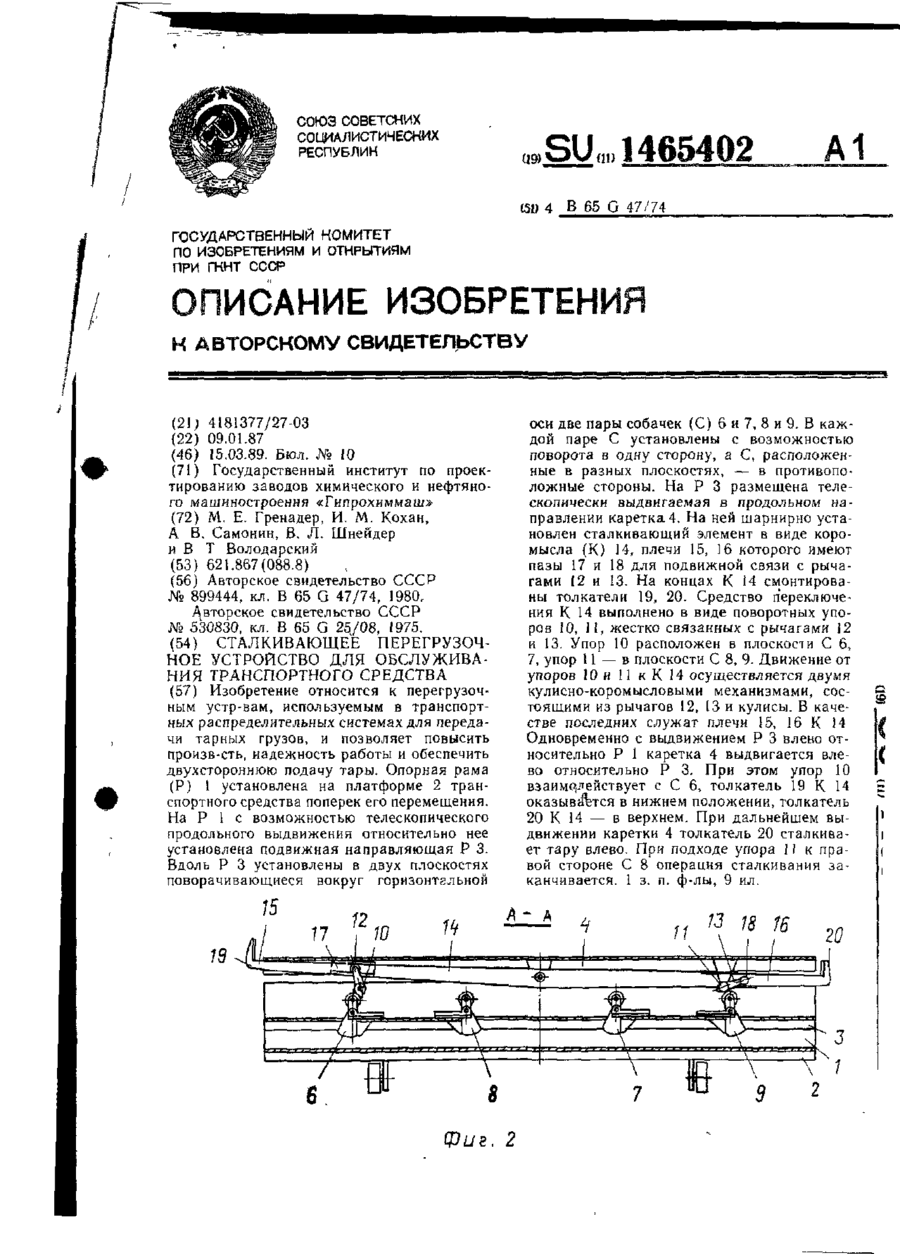
Формула / Реферат:
Формула изобретения1. Сталкивающее перегрузочное устройство для обслуживания транспортного средства, включающее опорную раму, выдвижную поперек перемещения транспортного средства каретку, на которой шарнирно установлен сталкивающий элемент с толкателями, и средство переключения сталкивающего элемента, отличающееся тем, что, с целью повышения производительности, надежности работы и обеспечения двухсторонней подачи тары, выдвижная...
Попередній патент: Спосіб визначення циклотропії і пристрій для його реалізації
Наступний патент: Спосіб одержання полімерних гідрогелей
Випадковий патент: Спосіб хірургічного усунення антре-орального сполучення