Дводвигунний електропривід




Формула / Реферат
Двухдвигательный электропривод, содержащий первый управляемый двигатель с установленными на его валу первым датчиком положения и первым датчиком скорости, подключенный к выходу первого регулятора тока, второй управляемый двигатель с установленными на его валу вторым датчиком положения и вторым датчиком скорости, подключенный к выходу второго регулятора тока, регулятор положения, подключенный первым входом к выходу первого датчика положения, вторым входом — к выходу второго датчика положения, а третьим входом — к задатчику положения, регулятор скорости, подключенный первым входом к выходу первого датчика скорости, вторым входом — к выходу регулятора положения, а выходом — через первый сумматор к входу первого регулятора тока, регулятор рассогласования по положению, подключенный первым входом к выходу первого датчика положения, вторым входом через первый инвертор — к выходу второго датчика положения, а третьим входом — к задатчику рассогласования по положению, регулятор рассогласования по скорости, подключенный первым входом к выходу первого датчика скорости, вторым входом через второй инвертор — к выходу второго датчика скорости, а выходом — через. третий инвертор ко второму входу первого сумматора и через второй сумматор к входу второго регулятора тока, отличающийся тем, что, с целью улучшения динамических показателей за счет обеспечения независимости контура регулирования положения и контура синхронизации, а также за счет улучшения динамических показателей контура синхронизации, регулятор скорости снабжен третьим входом и подключен им к выходу второго датчика скорости, регулятор рассогласования по скорости снабжен третьим входом и подключен им к выходу регулятора рассогласования по положению, второй сумматор подключен вторым входом к выходу регулятора скорости.
Текст
Изобретение относится к электротехнике и может быть использовано в двухдвигательных следящих электроприводах с разделенной нагрузкой при необходимости синхронного перемещения исполнительных валов. Цель изобретения - улучшение динамических показателей за счет обеспечения независимости контура регулирования положения и контура синхронизации, а также за счет улучшения динамических показателей контура синхронизации. Электроприеод содержит электродвигатель 1 с датчиками положения 2, 6 и датчиками скорости 3, 7. Вход общего регулятора 11 скорости соединен с выходом регулятора 9 положения. Последовательно включенные регуляторы рассогласования по положению 13 и скорости 16 соединены с датчиками 3, 7 скорости и датчиками 2, 6 положения. 8 данном устройстве обеспечивается независимость контуров слежения и синхронизации и повышение динамических показателей электропривода за счет повышения быстродействия контура синхронизации. 1 ил. т С о ел о 1705997 Изобретение относится к электротехниположения, которое должны синхронно отке, а именно к многодвигательным электроработать двигатели 1 и 5, Л 3 3 - задание приводам, и может найти применение в рассогласования между среднеарифметичелинейных приводах подач разнообразного ским положением роторов двигателей 1 и 5 технологического оборудования. и положением ротора двигателя 1. Цель изобретения - улучшение динамиС помощью датчиков 2 и 6, 3 и 7 измеряческих показателей за счет обеспечения ются текущие положения Si и S2, скорости независимости контура регулирования поперемещения Vi и,\/2 роторов управляеложения и контура синхронизации, а также мых двигателей 1 и 5. за счет улучшения динамических показате- 10 Регулятор 9 положения формирует лей контура синхронизации. сигнал, определяемый рассогласованием На чертеже представлена схема электмежду заданием S3 и текущим среднеарифропривода. метическим положением роторов двигэтеЭлектропривод содержит первый упSi -f- S2 п л. равляемый двигатель 1 с установленными 15 леи — — — . Регулятор 11 скорости на его валу первым датчиком 2 положения и вырабатывает управляющий сигнал а функпервым датчиком 3 скорости, подключенции рассогласования между выходным сигный к выходу регулятора 4 тока, второй упналом регулятора 9 положения и суммой равляемый двигатель 5 с установленным на текущих скоростей V1+V2. Регулятор 13 расего валу вторым датчиком 6 положения и 20 согласования по положению формирует сигвторым датчиком 7 скорости, подключеннал, определяемый рассогласованием ный к выходу второго регулятора 8 тока, между удвоенным заданием A S 3 и разнорегулятор 9 положения, подключенный перстью текущих положений S2-S1. Регулятор вым входом к выходу первого датчика 2 по16 рассогласования по скорости вырабаложения, вторым входом - к выходу второго 25 тывает сигнал в функции рассогласования датчика 6 положения, а третьим входом к между выходным сигналом регулятора 13 и задатчику 10 положения, регулятор 11 скоразностью текущих скоростей V2-V1. рости, подключенный первым входом к выВыходной сигнал регулятора 11 скороходу первого датчика 3 скорости, вторым сти является управляющим сигналом регувходом - к выходу регулятора 9 положения, 30 ляторов 4 и 8 тока, а выходной сигнал а выходом - через первый сумматор 12 к регулятора 1 б рассогласования по скорости входу первого регулятора 4 тока, регулятор корректирующим сигналом. 13 рассогласования по положению, подклюПри нарушении синхронности перемеченный первым входом к выходу первого щения роторов двигателей на выходе регудатчика 2 положения, вторым входом через первый инвертор 14 - к выходу второго дат- 35 лятора 16 формируется корректирующий сигнал, который,усиливая сигнал управлечика 6 положения, а третьим входом - к ния отстающим двигателем и ослабляя друзадатчику 15 рассогласования по положегой сигнал управления, стремится нию, регулятор 16 рассогласования по скоисключить возникшее рассогласование по рости, подключенный первым входом к выходу первого датчика 3 скорости, вторым 40 положению роторов двигателей. Отработка двухдвигательным электровходом через второй инвертор 17 - к выходу приводом задания по положению .с обесвторого датчика 7 скорости, а выходом печением синхронного перемещения через третий инвертор 18 к второму входу роторов двигателей достигается за счет первого сумматора 12 и через второй сум45 одновременного функционирования двух матор 19 к входу второго регулятора 8 тока. контуров регулирования. С помощью Кроме того электропривод имеет третий первого контура роторы двигателей стревход 4 регулятора 11 скорости, который мятся занять положения, среднеарифподключен к выходу второго датчика 7 скометическое значение которых равнялось рости, регулятор 16 рассогласования по ско_ Si рости снабжен третьим входом и подключен 50 бы заданию, т.е. когда — + S2 • 5«. . c им к выходу регулятора 13 рассогласования С помощью второго контура регулиропо положению, второй сумматор 19 подклювания возникающее рассогласование по чен вторым входом к выходу регулятора 11 положению роторов двигателей стабилизискорости. 55 руется на заданном уровне, т.е. роторы двиЭлектропривод работает следующим гателей стреінятся занять положения, образом. удовлетворяющие равенству На управляющий вход регулятора поло32 - Si . жения 9 подается сигнал 2S3. а на регулятор 13 - сигнал 2Л S3, где S3 ~ задание 1705997 '• Следовательно, при одновременном функционировании обоих контуров регулирования роторы двигателей 1 и 5 синхронно стремятся занять положения: установленными на его залу первым датчиком положения и первым датчиком скорости, подключенный к выходу первого регулятора тока, второй управляемый двига5 тель с установленными на его валу вторым датчиком положения и вторым датчиком S r S r A S3, S 2 =S 3 + A Sa< скорости, подключенный к выходу иторого регулятора тока, регулятор положения, подСтруктура регуляторов 16, 11, 9, 13 и их ключенный первым входом к выходу первопараметры выбираются из условий устойчивости контуров регулирования и требуемого 10 го датчика положения, вторым входом - к выходу второго датчика положения, а третькачества отработки заданий двухдвигательим входом - к задатчику положения, регуляным электроприводом. В зависимости от тор скорости, подключенный первым поставленных требований в качестве этих входом к выходу первого датчика скорости, регуляторов могут быть использованы регуляторы П-, ПИ- или ПИД-типа. 15 вторым входом - к выходу регулятора положения, а выходом - через первый сумматор Стабилизация рассогласования по пок входу первого регулятора тока, регулятор ложению иа уровне, в общем случае не рассогласования по положению, подклюравном нулю, позволяет, например, скомченный первым входом к выходу первого пенсировать конструктивную несогласодатчика положения, вторым входом через ванность начала отчета датчиков 2 и б 20 первый инвертор-к выходу второго датчика положения. В предлагаемом электропривоположения, а третьим входом - к задатчику де двигатели 1 и 5 управляются от общего рассогласования по положению, регулятор регулятора 11 скорости, а регулятор 16 расрассогласования по скорости, подключенсогласования по скорости включен посяедоный первым входом к выходу первого датчивательно с регулятором 13 рассогласования 25 ка скорости, вторым входом через второй по положению. При равенстве характериинвертор - к выходу второго датчика скоростик двигателей 1,5 и их регуляторов тока 4 сти, а выходом - через третий инвертор к и 8 достигается независимость каналов ре* второму входу первого сумматора и через гулирования положения и синхронизации. второй сумматор к входу второго регулятора Это позволяет за счет выбора парамзтров 30 тока, отл и ч а ю щи й с я тем, что, с целью регуляторов рассогласования по скорости улучшения динамических показателей за и положению 16 и 13 добиться высоких дисчет обеспечения независимости контура намических показателей для контура синрегулирования положения и контура синххронизации. ронизации, а также за счет улучшения Таким образом, в изобретении улучше- 35 динамических показателей контура синхние динамических показателей электроронизации, регулятор скорости снабжен привода достигается за счет обеспечения третьим входом и подключен им к выходу независимости контуров регулирования повторого датчика скорости, регулятор расложения и синхронизации и за счет повышесогласования по скорости снабжен третьим ния динамических показателей контура 40 входом и подключен им к выходу регулятора синхронизации. рассогласования по положению, второй сумматор подключен вторым входом к выхоФормула изобретения ду регулятора скорости. Двухдвигательный электропривод, содержащий первый управляемый двигатель с Редактор А.Калениченко Составитель Е Панов Техред М.Моргентзл Корректор Н.Ревская Заказ 895 Тираж 250 Подписное ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., 4/5 Производственно-издательский комбинат "Патент", г. Ужгород, ул.Гагарина. 101 ! '
ДивитисяДодаткова інформація
Назва патенту англійськоюDouble-motor electric drive
Автори англійськоюYaroslavtsev Mykhailo Ivanovych
Назва патенту російськоюДвухдвигательный электропривод
Автори російськоюЯрославцев Михаил Иванович
МПК / Мітки
МПК: H02P 5/46
Мітки: електропривід, дводвигунний
Код посилання
<a href="https://ua.patents.su/4-1603-dvodvigunnijj-elektroprivid.html" target="_blank" rel="follow" title="База патентів України">Дводвигунний електропривід</a>
Сигналізатор граничної швидкості обертання валу
Номер патенту: 1333
Опубліковано: 25.03.1994
Автор: БЕЗСЧАСТНИЙ Василь Олексійович
МПК: G01P 3/42
Мітки: обертання, сигналізатор, швидкості, граничної, валу
Формула / Реферат:
Сигнализатор предельной скорости вращения вала, содержащий первый формирователь импульсов, сигнализатор, коммутатор, переключатель, генератор тактовых импульсов, программный блок, первый и второй счетчики импульсов, формирователь запрещающего сигнала, второй формирователь, первый триггер, второй триггер и первый и второй элементы И, причем вход первого формирователя импульсов соединен с входом устройства, а выход — с входом сигнализатора...
Електропривід
Номер патенту: 1096
Опубліковано: 30.12.1993
Автор: Дмитренко Леонід Петрович
МПК: H02P 1/26
Мітки: електропривід
Формула / Реферат:
1. Электропривод, содержащий трехфазный асинхронный электродвигатель, первый контактор с катушкой, с тремя силовыми и с замыкающим и размыкающим контактами, второй контактор с катушкой, тремя силовыми и с размыкающим контактами, первый элемент задержки с двумя выводами, кнопку "Пуск", выполненную в виде размыкающего и замыкающего контактов, резистор, кнопку "Стоп", один вывод которого снабжен зажимом для подключения к...
Пристрій для вимірювання переміщень
Номер патенту: 454
Опубліковано: 30.04.1993
Автори: Токовенко Степан Омелянович, Оснач Віктор Григорович, Вдовиченко Валерій Іванович, Тализін Григорій Володимирович, Виговський Олександр Володимирович, Свідлер Ігор Давидович
МПК: H03M 1/50
Мітки: пристрій, вимірювання, переміщень
Формула / Реферат:
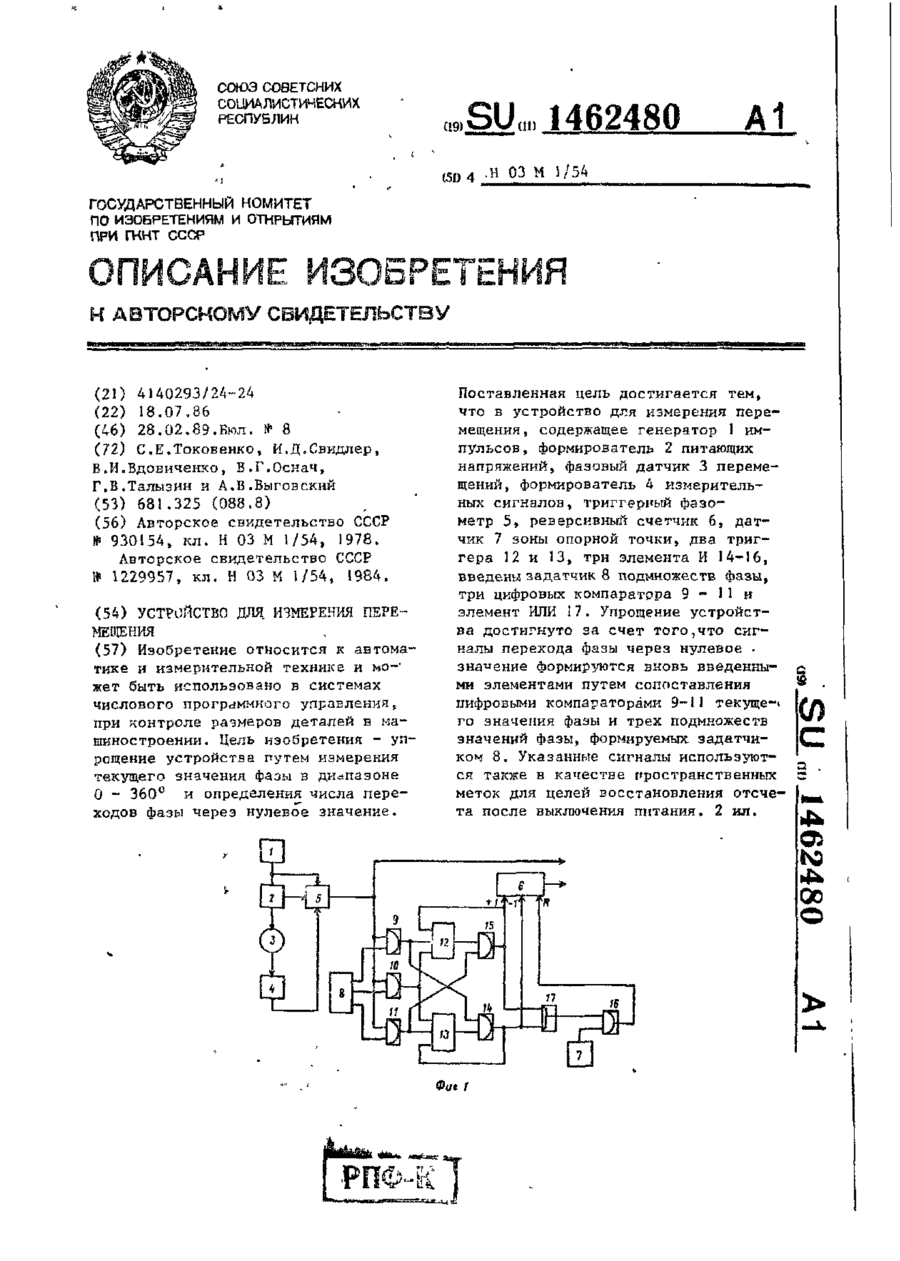
Формула изобретенияУстройство для измерения перемещения, содержащее генератор импульсов, выход которого соединен с входом формирователя питающих напряжений и с первым входом триггерного фазометра, второй вход которого подключен к первому выходу формирователя питающих напряжений, второй выход которого соединен с входом фазового датчика перемещений, выход которого через формирователь измерительных сигналов подключен к третьему входу...
Пристрій для автоматичного налагоджування вальцювальної кліті
Номер патенту: 880
Опубліковано: 15.12.1993
Автори: Коркодола Ілля Іванович, Деревянко Василь Іванович, Кокін Володимир Михайлович, Щербина Геннадій Семенович, Устименко Олександр Федорович, Кулагин Георгій Федорович, Бочанов Юрій Владіленович, Зінченко Михайло Федорович, Цимбал Володимир Данилович
МПК: B21B 37/00
Мітки: вальцювальної, налагоджування, автоматичного, пристрій, кліті
Формула / Реферат:
Устройство для автоматической настройки прокатной клети, включающее регулятор положения, регуляторы скорости и тока, тиристорний преобразователь, блок суммирования, блок задания, датчик положения, отличающееся тем, что оно снабжено пятью запоминающими устройствами, двумя сумматорами, двумя компараторами, двумя ключами, двумя логическими элементами И, логическим элементом ИЛИ, инвертором, блоком задания коррекции, блоком зоны...
Пристрій для стримання перешкод
Номер патенту: 159
Опубліковано: 30.04.1993
Автори: Годлевський Віталій Станіславович, Владимирський Олександр Альбертович
МПК: G01S 7/537
Мітки: стримання, перешкод, пристрій
Формула / Реферат:
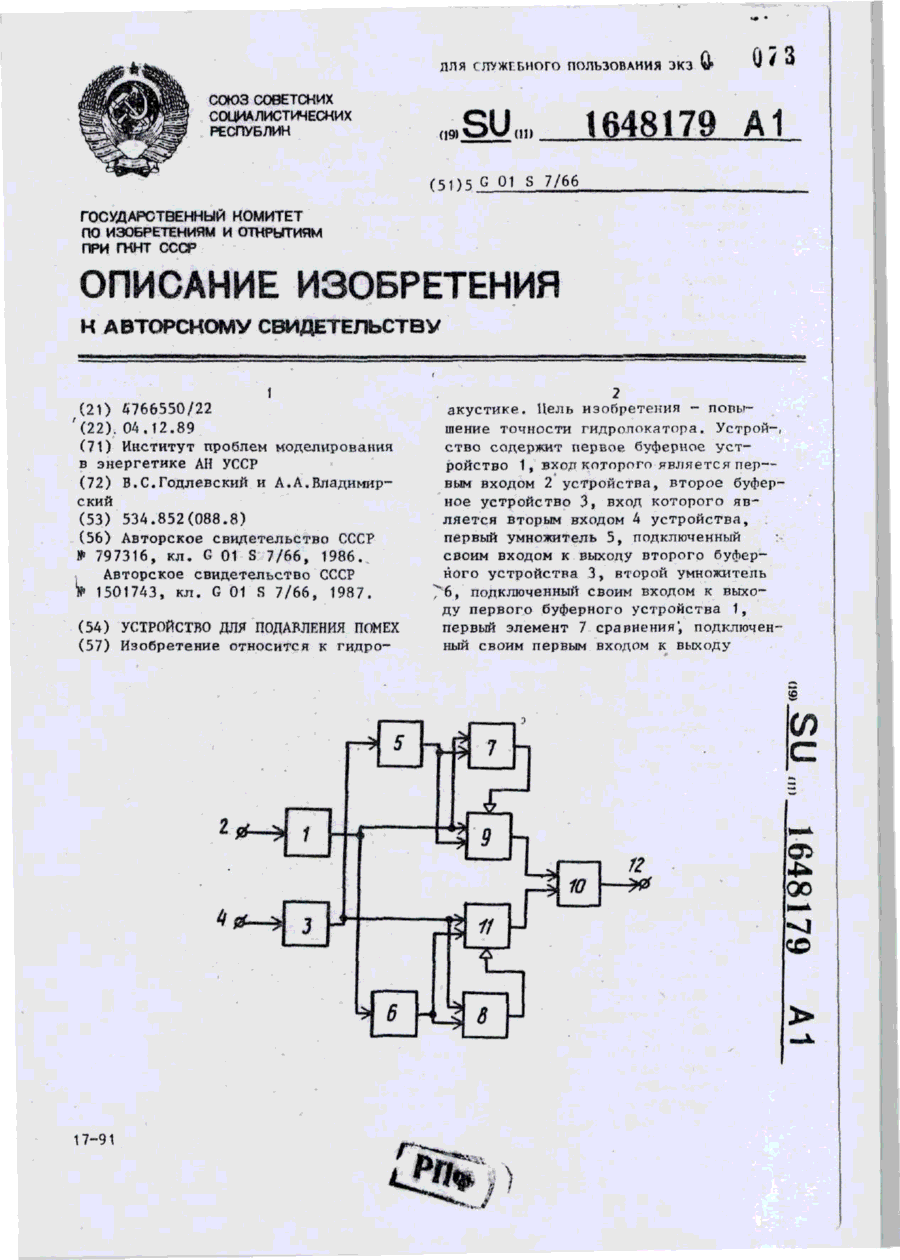
Устройство для подавления помех, содержащее первое буферное устройство, вход которого является первым входом устройства, второе буферное устройство, вход которого является вторым входом устройства, первый умножитель, подключенный своим входом к выходу второго буферного устройства, второй умножитель, подключенный своим входом к выходу первого буферного устройства, первый элемент сравнения, подключенный своим первым входом к выходу первого...
Попередній патент: Пристрій для огранки діамантів
Наступний патент: Засіб визначення концентрації незаповнених глибоких центрів у структурі низькоомна плівка-високоомна підложка
Випадковий патент: Терморегульований кріостатний пристрій