Спосіб вимірювання висоти польоту цілі на загоризонтних дальностях у декаметровому діапазоні хвиль
Номер патенту: 3191
Опубліковано: 15.10.2004
Автори: Карлов Дмитро Володимирович, Полярус Олександр Васильович
Формула / Реферат
Спосіб визначення висоти польоту цілі у декаметровому діапазоні хвиль, який полягає в тому, що в іоносфері створюють антену з синтезованою апертурою (СА) за рахунок випромінювання багаточастотних імпульсних радіосигналів декаметрового діапазону хвиль при нерухомій наземній антені під кутами місця, діапазон яких не перевищує ширини діаграми спрямованості наземної антени, приймають на кожній частоті сигнали зворотно-похилого зондування і сигнали, відбиті від цілі, компенсують групові і фазові затримки сигналів від цілі шляхом вимірювання на різних частотах різниць групових і фазових затримок сигналів зворотно-похилого зондування і групових затримок, що відповідають дальностям до цілі по променях, і вводять ці групові і фазові затримки зі зворотним знаком у сигнали від цілі на відповідних частотах, а перед когерентною обробкою перетворюють шляхом гетеродинування прийняті сигнали від цілі на одну частоту, який відрізняється тим, що вимірюють різницю затримок сигналів від антени з СА до ділянки відбиття сигналів від земної поверхні і від антени з СА до цілі і цю різницю множать на синус кута спостереження цілі, який вимірють з високою точністю з допомогою РЛС з СА, що і приводить до можливості точного вимірювання висоти, при цьому висоту польоту цілі визначають за формулою:
![]() ,
,
де ![]() - відстань від антени з СА до ділянки відбиття сигналу від земної поверхні;
- відстань від антени з СА до ділянки відбиття сигналу від земної поверхні;
![]() - відстань від антени з СА до цілі;
- відстань від антени з СА до цілі;
![]() - радіус Землі;
- радіус Землі;
![]() ,
,
![]() - висота положення СА;
- висота положення СА;
![]() - кут випромінювання.
- кут випромінювання.
Текст
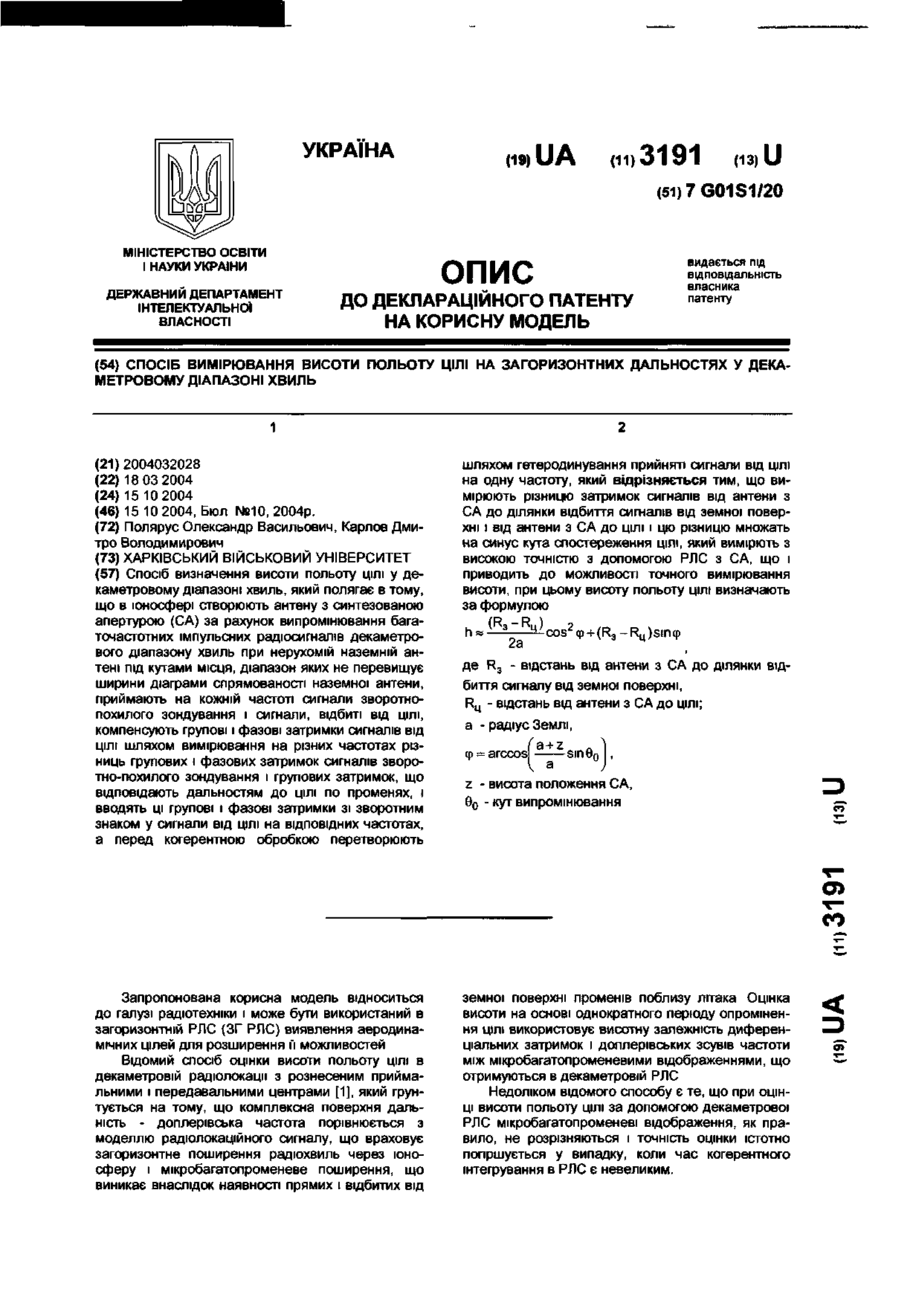
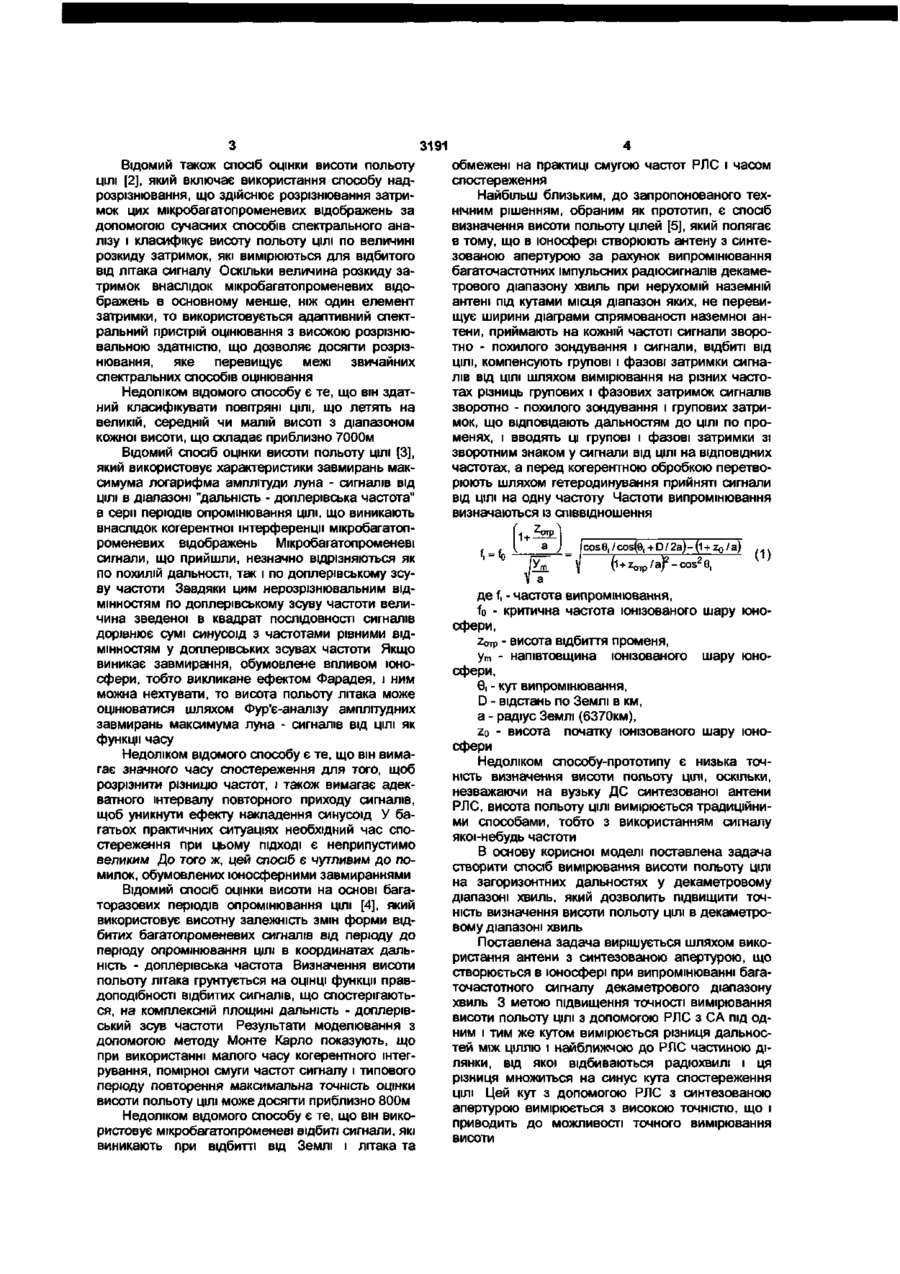
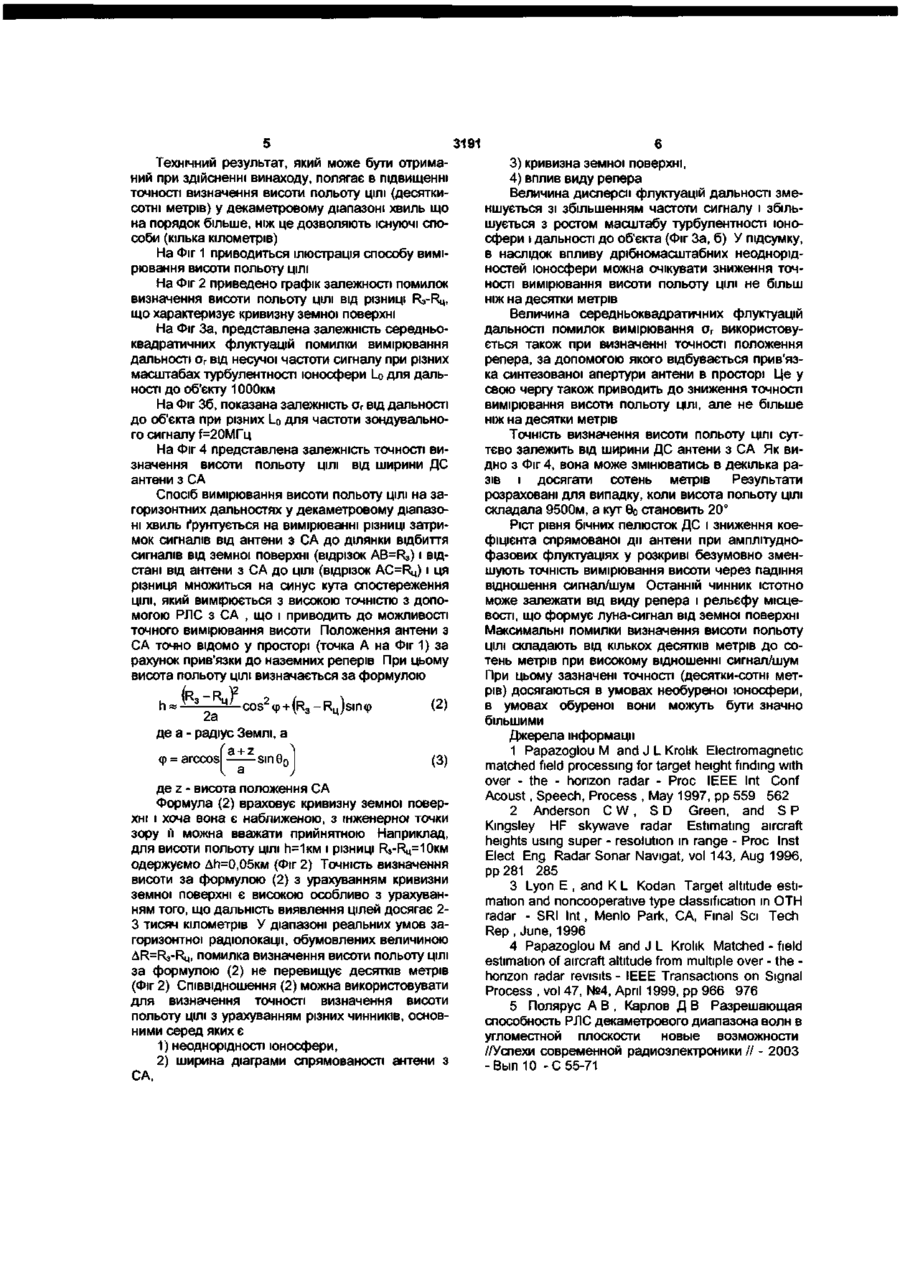
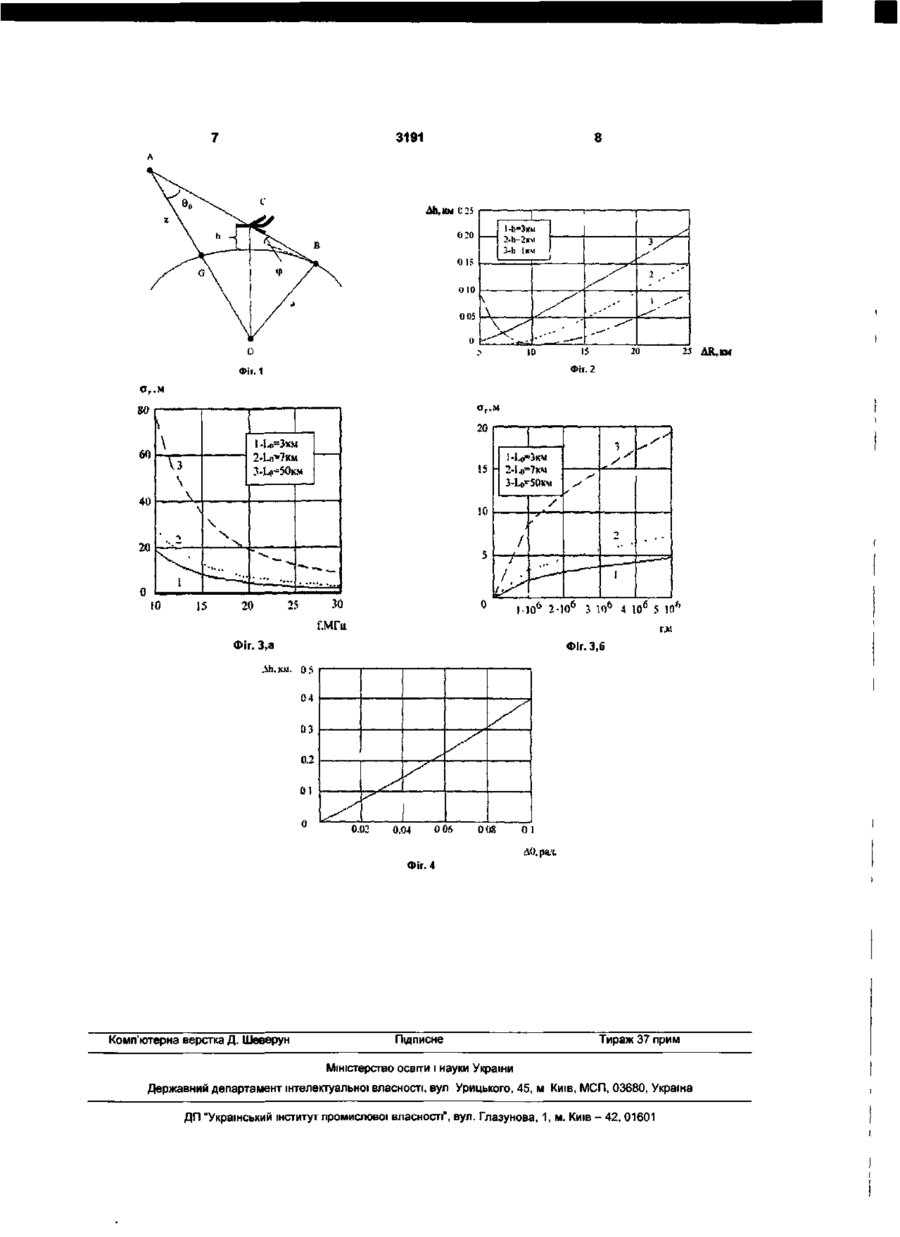
Спосіб визначення висоти польоту ЦІЛІ у декаметровому діапазоні хвиль, який полягає в тому, що в іоносфері створюють антену з синтезованою апертурою (СА) за рахунок випромінювання багаточастотних імпульсних радіосигналів декаметрового діапазону хвиль при нерухомій наземній антені під кутами місця, діапазон яких не перевищує ширини діаграми спрямованості наземної антени, приймають на кожній частоті сигнали зворотнопохилого зондування і сигнали, відбиті від ЦІЛІ, компенсують групові і фазові затримки сигналів від ЦІЛІ шляхом вимірювання на різних частотах різниць групових і фазових затримок сигналів зворотно-похилого зондування і групових затримок, що відповідають дальностям до ЦІЛІ ПО променях, і вводять ці групові і фазові затримки зі зворотним знаком у сигнали від ЦІЛІ на ВІДПОВІДНИХ частотах, а перед когерентною обробкою перетворюють шляхом гетеродинування прийняті сигнали від ЦІЛІ на одну частоту, який відрізняється тим, що вимірюють різницю затримок сигналів від антени з СА до ділянки відбиття сигналів від земної поверхні і від антени з СА до ЦІЛІ І ЦЮ різницю множать на синус кута спостереження цілі, який вимірють з високою точністю з допомогою РЛС з СА, що і приводить до можливості точного вимірювання висоти, при цьому висоту польоту ЦІЛІ визначають за формулою де R3 - відстань від антени з СА до ділянки відбиття сигналу від земної поверхні, RM - відстань від антени з СА до ЦІЛІ; а - радіус Землі, fa + z Ф = arccos І а sin0 o z - висота положення СА, 6 0 - кут випромінювання О со Запропонована корисна модель відноситься до галузі радіотехніки і може бути використаний в загоризонтній РЛС (ЗГ РЛС) виявлення аеродинамічних цілей для розширення п можливостей Відомий спосіб оцінки висоти польоту ЦІЛІ В декаметровій радіолокації з рознесеним приймальними і передавальними центрами [1], який грунтується на тому, що комплексна поверхня дальність - доплерівська частота порівнюється з моделлю радіолокаційного сигналу, що враховує загоризонтне поширення радіохвиль через іоносферу і мікробагатопроменеве поширення, що виникає внаслідок наявності прямих і відбитих від земної поверхні променів поблизу літака Оцінка висоти на основі однократного періоду опромінення ЦІЛІ використовує висотну залежність диференціальних затримок і доплерівських зсувів частоти між мікробагатопроменевими відображеннями, що отримуються в декаметровій РЛС Недоліком відомого способу є те, що при ОЦІНЦІ висоти польоту ЦІЛІ за допомогою декаметрової РЛС мікробагатопроменеві відображення, як правило, не розрізняються і точність оцінки істотно погіршується у випадку, коли час когерентного інтегрування в РЛС є невеликим. 3191 Відомий також спосіб оцінки висоти польоту обмежені на практиці смугою частот РЛС і часом ЦІЛІ [2], який включає використання способу надспостереження розрізнювання, що здійснює розрізнювання затриНайбільш близьким, до запропонованого техмок цих мікробагатопроменевих відображень за нічним рішенням, обраним як прототип, є спосіб допомогою сучасних способів спектрального анавизначення висоти польоту цілей [5], який полягає лізу і класифікує висоту польоту ЦІЛІ ПО величині в тому, що в іоносфері створюють антену з синтерозкиду затримок, які вимірюються для відбитого зованою апертурою за рахунок випромінювання від літака сигналу Оскільки величина розкиду забагаточастотних імпульсних радіосигналів декаметримок внаслідок мікробагатопроменевих відотрового діапазону хвиль при нерухомій наземній бражень в основному менше, ніж один елемент антені під кутами місця діапазон яких, не перевизатримки, то використовується адаптивний спектщує ширини діаграми спрямованості наземної анральний пристрій оцінювання з високою розрізнютени, приймають на кожній частоті сигнали зворовальною здатністю, що дозволяє досягти розрізтно - похилого зондування і сигнали, відбиті від нювання, яке перевищує межі звичайних ЦІЛІ, компенсують групові і фазові затримки сигнаспектральних способів оцінювання лів від ЦІЛІ шляхом вимірювання на різних частоНедоліком відомого способу є те, що він здаттах різниць групових і фазових затримок сигналів ний класифікувати повітряні цілі, що летять на зворотно - похилого зондування і групових затривеликій, середній чи малій висоті з діапазоном мок, що відповідають дальностям до ЦІЛІ ПО прокожної висоти, що складає приблизно 7000м менях, і вводять ці групові і фазові затримки зі Відомий спосіб оцінки висоти польоту ЦІЛІ [3], зворотним знаком у сигнали від ЦІЛІ на ВІДПОВІДНИХ який використовує характеристики завмирань макчастотах, а перед когерентною обробкою перетвосимума логарифма амплітуди луна - сигналів від рюють шляхом гетеродинування прийняті сигнали ЦІЛІ в діапазоні "дальність - доплерівська частота" від ЦІЛІ на одну частоту Частоти випромінювання в сери періодів опромінювання ЦІЛІ, ЩО виникають визначаються із співвідношення внаслідок когерентної інтерференції мікробагатопроменевих відображень Мікробагатопроменеві ... сигнали, що прийшли, незначно відрізняються як 1 0 cosel/cos(ei + D/2a)по похилій дальності, так і по доплерівському зсуву частоти Завдяки цим нерозрізнювальним ВІДде f, - частота випромінювання, МІННОСТЯМ по доплерівському зсуву частоти велиfo - критична частота іонізованого шару іоночина зведеної в квадрат ПОСЛІДОВНОСТІ сигналів сфери, дорівнює сумі синусоїд з частотами рівними ВІДZorp - висота відбиття променя, МІННОСТЯМ у доплерівських зсувах частоти Якщо у т - напівтовщина іонізованого шару іоновиникає завмирання, обумовлене впливом іоносфери, сфери, тобто викликане ефектом Фарадея, і ним 6, - кут випромінювання, можна нехтувати, то висота польоту літака може D - відстань по Землі в км, оцінюватися шляхом Фур'є-аналізу амплітудних а - радіус Землі (6370км), завмирань максимума луна - сигналів від ЦІЛІ ЯК zo - висота початку іонізованого шару іонофункції часу сфери Недоліком відомого способу є те, що він вимаНедоліком способу-прототипу є низька точгає значного часу спостереження для того, щоб ність визначення висоти польоту ЦІЛІ, ОСКІЛЬКИ, розрізнити різницю частот, і також вимагає адекнезважаючи на вузьку ДС синтезованої антени ватного інтервалу повторного приходу сигналів, РЛС, висота польоту ЦІЛІ вимірюється традиційнищоб уникнути ефекту накладення синусоїд У бами способами, тобто з використанням сигналу гатьох практичних ситуаціях необхідний час споякоі-небудь частоти стереження при цьому ПІДХОДІ є неприпустимо В основу корисної моделі поставлена задача великим До того ж, цей спосіб є чутливим до постворити спосіб вимірювання висоти польоту ЦІЛІ милок, обумовлених іоносферними завмираннями на загоризонтних дальностях у декаметровому Відомий спосіб оцінки висоти на основі багадіапазоні хвиль, який дозволить підвищити точторазових періодів опромінювання ЦІЛІ [4], який ність визначення висоти польоту ЦІЛІ В декаметровикористовує висотну залежність змін форми відвому діапазоні хвиль битих багатопроменевих сигналів від періоду до Поставлена задача вирішується шляхом викоперіоду опромінювання ЦІЛІ В координатах дальристання антени з синтезованою апертурою, що ність - доплерівська частота Визначення висоти створюється в іоносфері при випромінюванні багапольоту літака грунтується на ОЦІНЦІ функції правточастотного сигналу декаметрового діапазону доподібності відбитих сигналів, що спостерігаютьхвиль 3 метою підвищення точності вимірювання ся, на комплексній площині дальність - доплеріввисоти польоту ЦІЛІ з допомогою РЛС з СА під одський зсув частоти Результати моделювання з ним і тим же кутом вимірюється різниця дальносдопомогою методу Монте Карло показують, що тей між ціллю і найближчою до РЛС частиною діпри використанні малого часу когерентного інтеглянки, від якої відбиваються радіохвилі і ця рування, помірної смуги частот сигналу і типового різниця множиться на синус кута спостереження періоду повторення максимальна точність оцінки ЦІЛІ Цей кут з допомогою РЛС з синтезованою висоти польоту ЦІЛІ може досягти приблизно 800м апертурою вимірюється з високою точністю, що і Недоліком відомого способу є те, що він викоприводить до можливості точного вимірювання ристовує мікробагатопроменеві відбиті сигнали, які висоти виникають при відбитті від Землі і літака та 3191 Технічний результат, який може бути отрима3) кривизна земної поверхні, ний при здійсненні винаходу, полягає в підвищенні 4) вплив виду репера точності визначення висоти польоту ЦІЛІ (десяткиВеличина дисперсії флуктуацій дальності змесотні метрів) у декаметровому діапазоні хвиль що ншується зі збільшенням частоти сигналу і збільшується з ростом масштабу турбулентності іонона порядок більше, ніж це дозволяють існуючі спосфери і дальності до об'єкта (Фіг За, б) У підсумку, соби (кілька кілометрів) в наслідок впливу дрібномасштабних неоднорідНа Фіг 1 приводиться ілюстрація способу виміностей іоносфери можна очікувати зниження точрювання висоти польоту ЦІЛІ ності вимірювання висоти польоту ЦІЛІ не більш На Фіг 2 приведено графік залежності помилок ніж на десятки метрів визначення висоти польоту ЦІЛІ ВІД різниці Ra-Rq, Величина середньоквадратичних флуктуацій що характеризує кривизну земної поверхні дальності помилок вимірювання о г використовуНа Фіг За, представлена залежність середньоється також при визначенні точності положення квадратичних флуктуацій помилки вимірювання репера, за допомогою якого відбувається прив'яздальності о> від несучої частоти сигналу при різних ка синтезованої апертури антени в просторі Це у масштабах турбулентності іоносфери І_о для дальсвою чергу також приводить до зниження точності ності до об'єкту 1000км вимірювання висоти польоту ЦІЛІ, але не більше На Фіг 36, показана залежність о г від дальності ніж на десятки метрів до об'єкта при різних І_о для частоти зондувальноТочність визначення висоти польоту ЦІЛІ сутго сигналу f=20MHu тєво залежить від ширини ДС антени з СА Як виНа Фіг 4 представлена залежність точності видно з Фіг 4, вона може змінюватись в декілька разначення висоти польоту ЦІЛІ від ширини ДС зів і досягати сотень метрів Результати антени з СА розраховані для випадку, коли висота польоту ЦІЛІ Спосіб вимірювання висоти польоту ЦІЛІ на заскладала 9500м, а кут 6 0 становить 20° горизонтних дальностях у декаметровому діапазоРіст рівня бічних пелюсток ДС і зниження коені хвиль ґрунтується на вимірюванні різниці затрифіцієнта спрямованої дії антени при амплітудномок сигналів від антени з СА до ділянки відбиття фазових флуктуаціях у розкриві безумовно зменсигналів від земної поверхні (відрізок AB=Rs) і відшують точність вимірювання висоти через падіння стані від антени з СА до ЦІЛІ (відрізок AC=RL4) І ЦЯ відношення сигнал/шум Останній чинник істотно різниця множиться на синус кута спостереження може залежати від виду репера і рельєфу місцеЦІЛІ, який вимірюється з високою точністю з доповості, що формує луна-сигнал від земної поверхні могою РЛС з СА , що і приводить до можливості Максимальні помилки визначення висоти польоту точного вимірювання висоти Положення антени з ЦІЛІ складають від кількох десятків метрів до соСА точно відомо у просторі (точка А на Фіг 1) за тень метрів при високому відношенні сигнал/шум рахунок прив'язки до наземних реперів При цьому При цьому зазначені точності (десятки-сотні метвисота польоту ЦІЛІ визначається за формулою рів) досягаються в умовах необуреної іоносфери, в умовах обуреної вони можуть бути значно (2) більшими де а - радіус Землі, а Джерела інформації 1 Papazoglou М and J L Krohk Electromagnetic sin6 Ф = arccos (3) matched field processing for target height finding with over - the - horizon radar - Proc IEEE Int Conf де z - висота положення СА Acoust, Speech, Process , May 1997, pp 559 562 Формула (2) враховує кривизну земної повер2 Anderson С W , S D Green, and S P хні і хоча вона є наближеною, з інженерної точки Kingsley HF skywave radar Estimating aircraft зору м можна вважати прийнятною Наприклад, heights using super - resolution in range - Proc Inst ДЛЯ ВИСОТИ ПОЛЬОТУ ЦІЛІ П=1КМ І РІЗНИЦІ R3-Rq=10KM Elect Eng Radar Sonar Navigat, vol 143, Aug 1996, одержуємо Дп=0,05км (Фіг 2) Точність визначення pp281 285 висоти за формулою (2) з урахуванням кривизни 3 Lyon E , and К L Kodan Target altitude estiземної поверхні є високою особливо з урахуванmation and noncooperative type classification in OTH ням того, що дальність виявлення цілей досягає 2radar - SRI Int, Menlo Park, CA, Final Sci Tech 3 тисяч кілометрів У діапазоні реальних умов заRep , June, 1996 горизонтної радіолокації, обумовлених величиною 4 Papazoglou M and J L Krohk Matched - field AR=R3-R4, помилка визначення висоти польоту ЦІЛІ estimation of aircraft altitude from multiple over - the за формулою (2) не перевищує десятків метрів horizon radar revisits - IEEE Transactions on Signal (Фіг 2) Співвідношення (2) можна використовувати Process , vol 47, №4, April 1999, pp 966 976 для визначення точності визначення висоти 5 Полярус А В , Карлов Д В Разрешающая польоту ЦІЛІ з урахуванням різних чинників, основспособность РЛС декаметрового диапазона волн в ними серед яких є угломестной плоскости новые возможности 1) неоднорідності іоносфери, //Успехи современной радиоэлектроники // - 2003 2) ширина діаграми спрямованості антени з -Вып 10 -С 55-71 СА, 3191 h,KM С 25 і 0 20 — ! .Мі-2км З-Ь ікч f ' ' 0 15 -*' 1 У 10 005 0 25 15 Фіг. 2 20 ! \ \з \ J -LcrfKM 15 Ь 2-1.р=7км \ 3-LO~50KM \ і " 10 V > N і > у 2 / _—ї—"—^1 — — і 1 10 15 20 25 30 ШГіі г,м Фіг. З,а Фіг. 3,6 ЛЬ, км. О 5 04 03 0.2 01 21^ 9.02 0.04 0 06 008 01 ДО, рал. Фіг. 4 Комп'ютерна верстка Д. Шеверун Підписне Тираж 37 прим Міністерство освгги і науки України Державний департамент інтелектуальної власності, вул Урицького, 45, м Київ, МСП, 03680, Україна ДП "Український інститут промислової власності", вул. Глазунова, 1, м. Київ - 42, 01601
ДивитисяДодаткова інформація
Автори англійськоюKarlov Dmytro Volodymyrovych
Автори російськоюКарлов Дмитрий Владимирович
МПК / Мітки
МПК: G01S 1/00
Мітки: дальностях, хвиль, висоті, вимірювання, цілі, декаметровому, польоту, спосіб, діапазоні, загоризонтних
Код посилання
<a href="https://ua.patents.su/4-3191-sposib-vimiryuvannya-visoti-polotu-cili-na-zagorizontnikh-dalnostyakh-u-dekametrovomu-diapazoni-khvil.html" target="_blank" rel="follow" title="База патентів України">Спосіб вимірювання висоти польоту цілі на загоризонтних дальностях у декаметровому діапазоні хвиль</a>
Спосіб вимірювання малих висот польоту над землею та пристрій для його реалізації
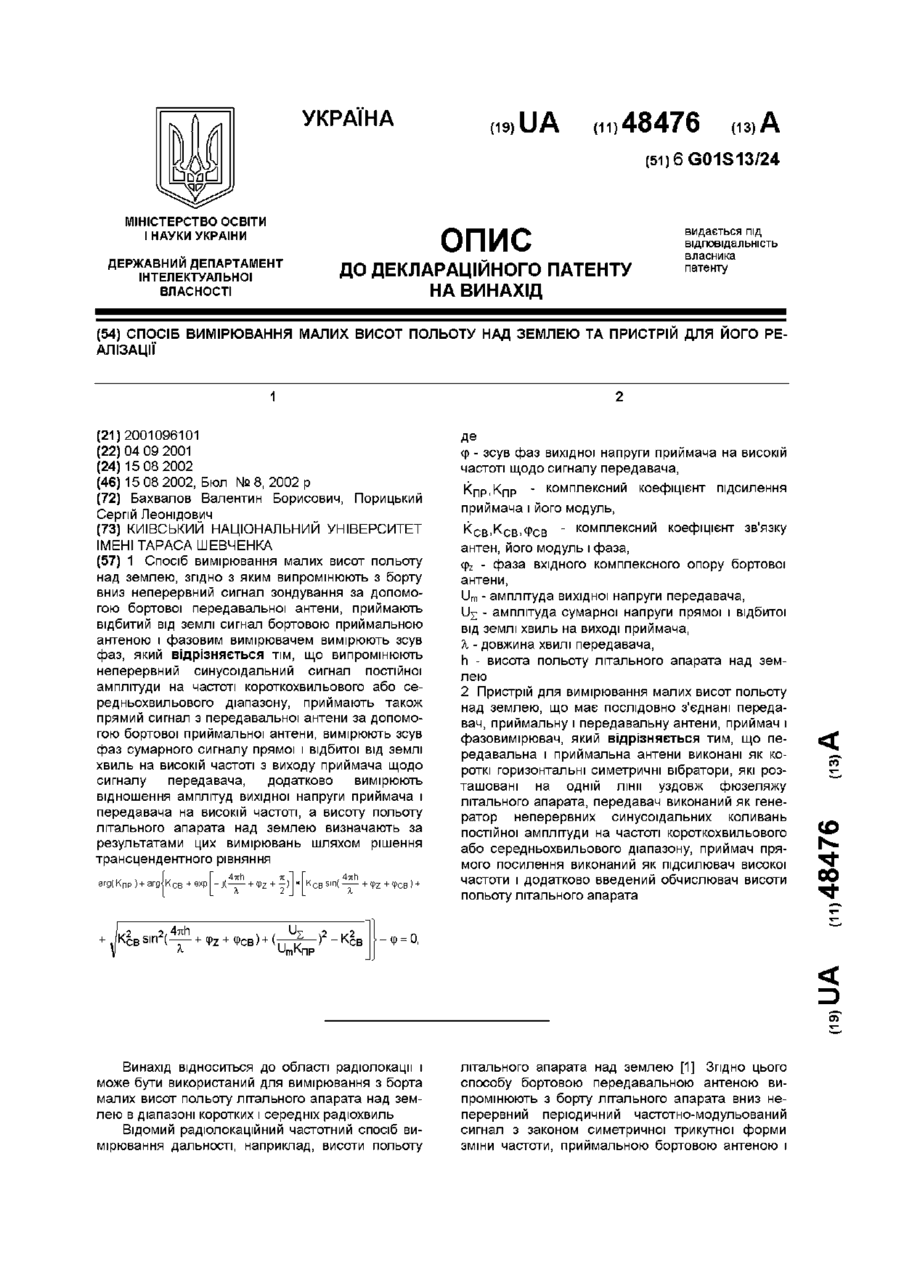
Номер патенту: 48476
Опубліковано: 15.08.2002
Автори: Бахвалов Валентин Борисович, Порицький Сергій Леонідович
МПК: G01S 13/24, G01S 13/00
Мітки: висот, землею, польоту, реалізації, вимірювання, пристрій, спосіб, малих
Формула / Реферат:
1. Спосіб вимірювання малих висот польоту над землею, згідно з яким випромінюють з борту вниз неперервний сигнал зондування за допомогою бортової передавальної антени, приймають відбитий від землі сигнал бортовою приймальною антеною і фазовим вимірювачем вимірюють зсув фаз, який відрізняється тім, що випромінюють неперервний синусоїдальний сигнал постійної амплітуди на частоті короткохвильового або середньохвильового діапазону, приймають...
Спосіб виявлення повітряної цілі та вимірювання її координат
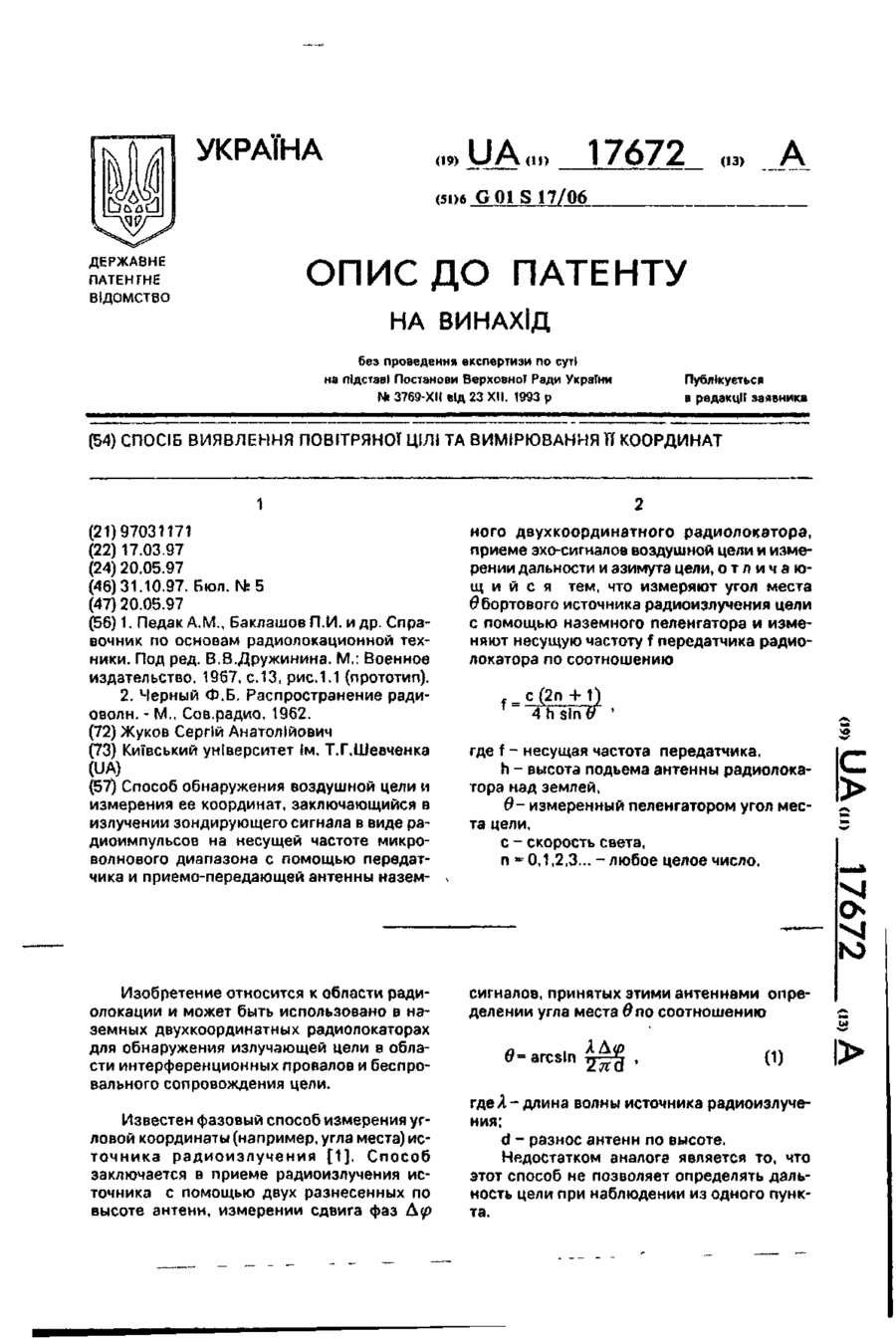
Номер патенту: 17672
Опубліковано: 16.07.2001
Автор: Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: спосіб, виявлення, координат, повітряної, вимірювання, цілі
Формула / Реферат:
Способ обнаружения воздушной цели и измерения ее координат, заключающийся в излучении зондирующего сигнала в виде радиоимпульсов на несущей частоте микроволнового диапазона с помощью передатчика и приемо-передающей антенны наземного двухкоординатного радиолокатора, приеме эхо-сигналов воздушной цели и измерении дальности и азимута цели, отличающийся тем, что измеряют угол места θ бортового источника радиоизлучения цеди с помощью...
Спосіб виміру кута місця цілі

Номер патенту: 32191
Опубліковано: 15.12.2000
Автори: Бахвалов Валентин Борисович, Кудрик Андрій Миколайович, Пророшин Сергій Михайлович
МПК: G01S 17/00
Мітки: місця, кута, спосіб, виміру, цілі
Текст:
...або шляхом електричного сканування діаграми спрямування антени в робочому кутомісцевому секторі радіолокатора. Спосіб-прототип полягає у виконанні таких операцій: періодичне хитання антени (або діаграми спрямування антени) у вертикальній площині розташування цілі в заданому кутомісцевому секторі; випромшення періодичних зондуючих радіоімпульсів на несучій частоті мікрохвильового діапазону; періодичне переключення антени з передачі...
Спосіб та пристрій резонансної терапії у міліметровому діапазоні хвиль
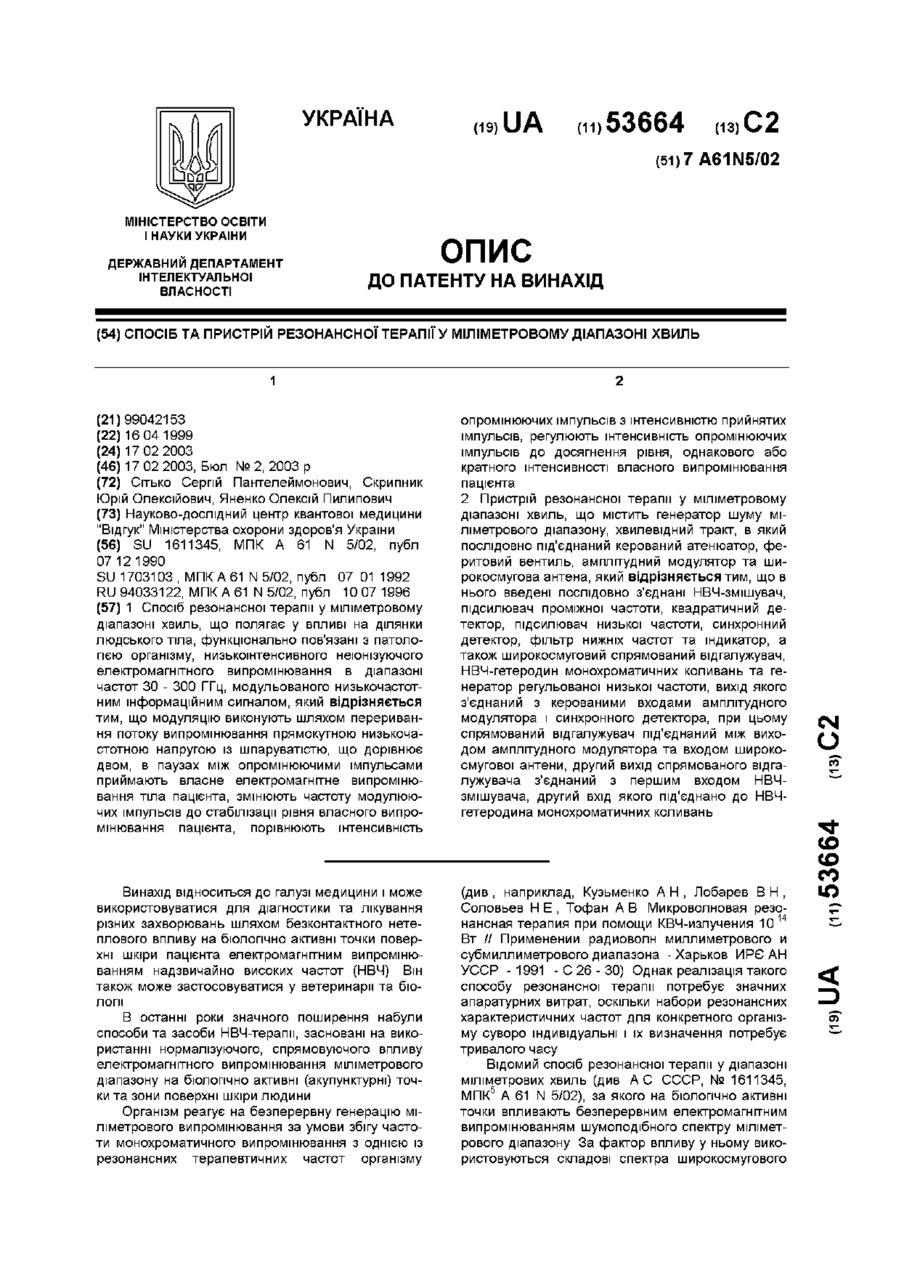
Номер патенту: 53664
Опубліковано: 17.02.2003
Автори: Яненко Олексій Пилипович, Скрипник Юрій Олексійович, Сітько Сергій Пантелеймонович
МПК: A61N 5/02
Мітки: діапазоні, резонансної, хвиль, міліметровому, пристрій, терапії, спосіб
Формула / Реферат:
1. Спосіб резонансної терапії у міліметровому діапазоні хвиль, що полягає у впливі на ділянки людського тіла, функціонально пов'язані з патологією організму, низькоінтенсивного неіонізуючого електромагнітного випромінювання в діапазоні частот 30 - 300 ГГц, модульованого низькочастотним інформаційним сигналом, який відрізняється тим, що модуляцію виконують шляхом переривання потоку випромінювання прямокутною низькочастотною напругою із...
Спосіб визначення висоти внутрішних хвиль водойми і пристрій для його виконання
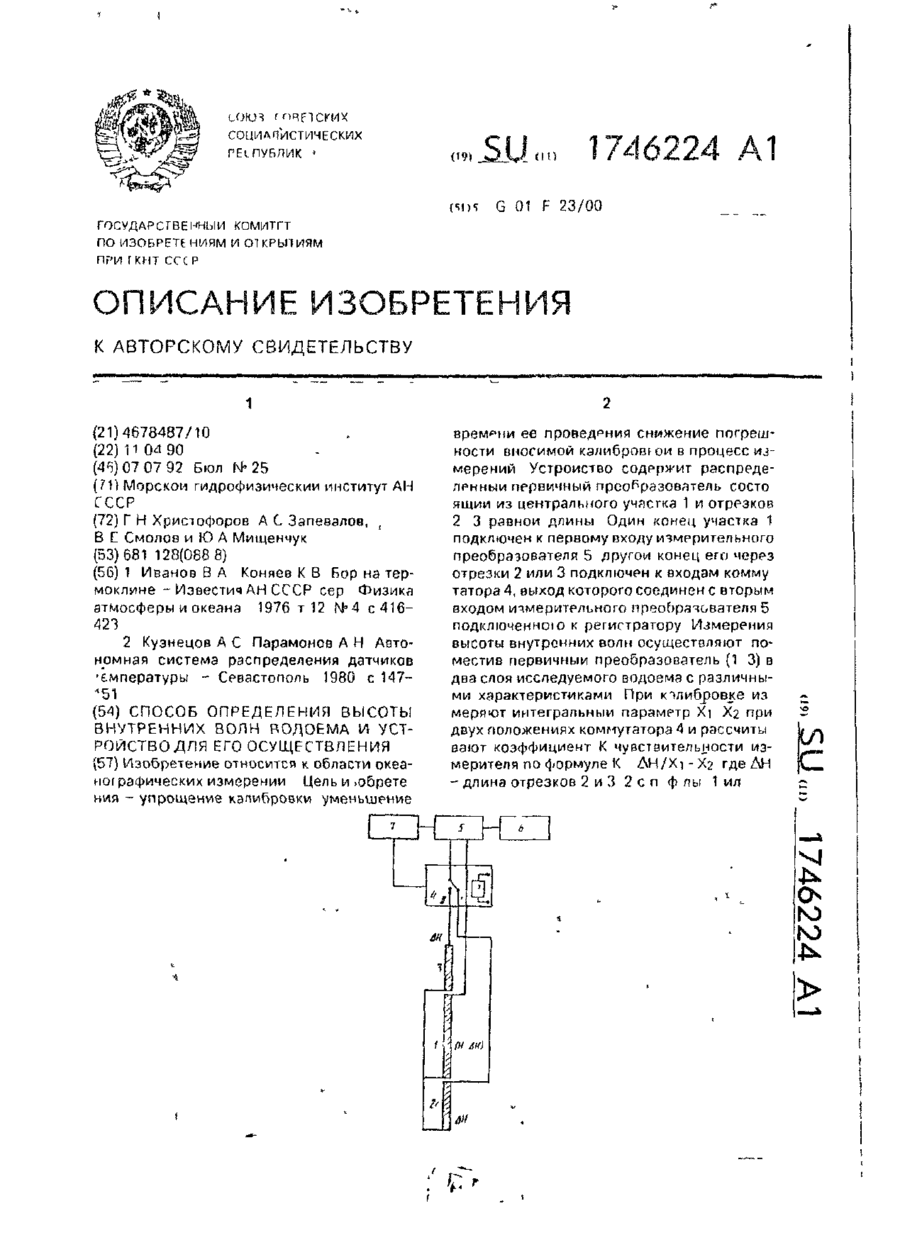
Номер патенту: 16822
Опубліковано: 29.08.1997
Автори: Запевалов Олександр Сергійович, Міщенчук Юрій Олексійович, Смолов Володимир Євгенович, Христофоров Геннадій Миколайович
МПК: G01F 23/00, G05D 7/00
Мітки: висоті, спосіб, водойми, виконання, хвиль, внутрішніх, пристрій, визначення
Формула / Реферат:
1. Способ определения высоты внутренних волн водоема, при которым измеряют интегральное значение температуры первого слоя жидкости, проводят калибровку 1 звена распределительного первичного преобразователя температуры измеяют интегральное значение температуры Хг второго слоя жидкости, смещенного относительно первого слоя по вертикали на величину АН, вычисляют коэффициент К чувствительности, измерителя по формуле К = -_-— _—- и по полученному...
Попередній патент: Розбірний контактний вузол
Наступний патент: Спосіб реконструкції шлунково-кишкового тракту після екстирпації кукси шлунка та гастректомії
Випадковий патент: Пристрій для регенерації коріння волосся