Лінійний індукторний двигун
Номер патенту: 3221
Опубліковано: 26.12.1994
Автори: Волков Геннадій Дмитрович, Зільберт Ігор Михайлович, Ярославцев Михайло Іванович


Формула / Реферат
1. Линейный индукторный двигатель, содержащий ферромагнитный статор и подвижный элемент, состоящий из фазных электромагнитных модулей, включающий в себя П-образные магнитопроводы, обмотки управления и постоянные магниты, причем ферромагнитный зубчатый статор и П-образные магнитопроводы подвижного элемента, зубцовые зоны которых имеют одинаковый шаг, разделены на магнитопроводящие секции в направлении, перпендикулярном направлению движения, и магнитопроводящие секции одной из частей двигателя смещены относительно друг друга вдоль направления движения, отличающийся тем, что указанные магнитопроводящие секции смещены относительно первой магнитопроводящей секции на
где m - количество магнитопроводящих секций.
j - порядковый номер секции,
- шаг зубцевого деления зоны двигателя.
2. Линейный индукторный двигатель по п. 1,отличающийся тем, что электромагнитные модули, принадлежащие одной фазе, взаимно смещены на , где n - любое целое число.
Текст
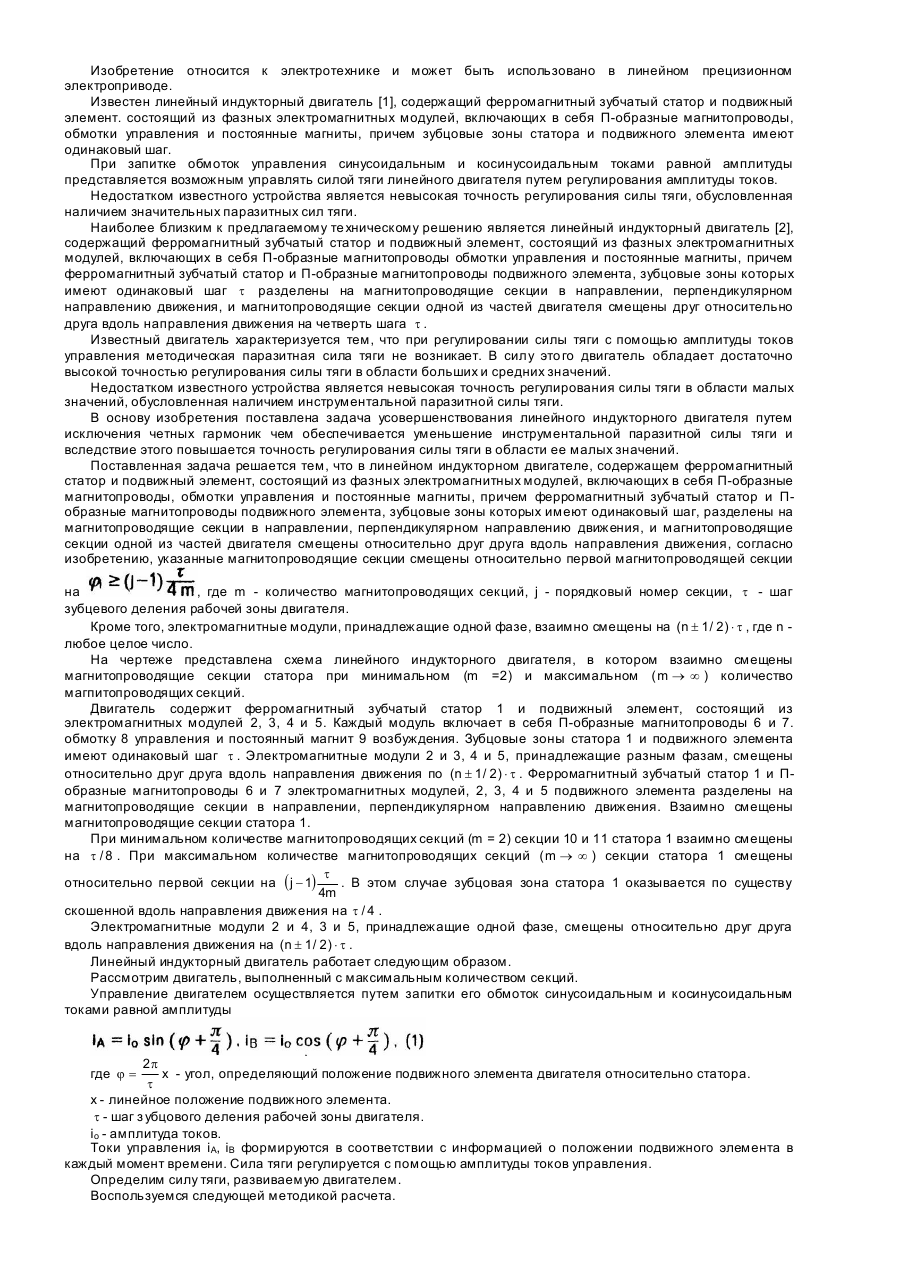
Изобретение относится к электротехнике и может быть использовано в линейном прецизионном электроприводе. Известен линейный индукторный двигатель [1], содержащий ферромагнитный зубчатый статор и подвижный элемент. состоящий из фазных электромагнитных модулей, включающих в себя П-образные магнитопроводы, обмотки управления и постоянные магниты, причем зубцовые зоны статора и подвижного элемента имеют одинаковый шаг. При запитке обмоток управления синусоидальным и косинусоидальным токами равной амплитуды представляется возможным управлять силой тяги линейного двигателя путем регулирования амплитуды токов. Недостатком известного устройства является невысокая точность регулирования силы тяги, обусловленная наличием значительных паразитных сил тяги. Наиболее близким к предлагаемому те хническому решению является линейный индукторный двигатель [2], содержащий ферромагнитный зубчатый статор и подвижный элемент, состоящий из фазных электромагнитных модулей, включающих в себя П-образные магнитопроводы обмотки управления и постоянные магниты, причем ферромагнитный зубчатый статор и П-образные магнитопроводы подвижного элемента, зубцовые зоны которых имеют одинаковый шаг t разделены на магнитопроводящие секции в направлении, перпендикулярном направлению движения, и магнитопроводящие секции одной из частей двигателя смещены друг относительно друга вдоль направления движения на четверть шага t . Известный двигатель характеризуется тем, что при регулировании силы тяги с помощью амплитуды токов управления методическая паразитная сила тяги не возникает. В силу это го двигатель обладает достаточно высокой точностью регулирования силы тяги в области больших и средних значений. Недостатком известного устройства является невысокая точность регулирования силы тяги в области малых значений, обусловленная наличием инструментальной паразитной силы тяги. В основу изобретения поставлена задача усовершенствования линейного индукторного двигателя путем исключения четных гармоник чем обеспечивается уменьшение инструментальной паразитной силы тяги и вследствие этого повышается точность регулирования силы тяги в области ее малых значений. Поставленная задача решается тем, что в линейном индукторном двигателе, содержащем ферромагнитный статор и подвижный элемент, состоящий из фазных электромагнитных модулей, включающих в себя П-образные магнитопроводы, обмотки управления и постоянные магниты, причем ферромагнитный зубчатый статор и Побразные магнитопроводы подвижного элемента, зубцовые зоны которых имеют одинаковый шаг, разделены на магнитопроводящие секции в направлении, перпендикулярном направлению движения, и магнитопроводящие секции одной из частей двигателя смещены относительно друг друга вдоль направления движения, согласно изобретению, указанные магнитопроводящие секции смещены относительно первой магнитопроводящей секции на , где m - количество магнитопроводящих секций, j - порядковый номер секции, t - шаг зубцевого деления рабочей зоны двигателя. Кроме того, электромагнитные модули, принадлежащие одной фазе, взаимно смещены на (n ± 1 / 2 ) × t , где n любое целое число. На чертеже представлена схема линейного индукторного двигателя, в котором взаимно смещены магнитопроводящие секции статора при минимальном (m =2) и максимальном ( m ® ¥ ) количество магпитопроводящих секций. Двигатель содержит ферромагнитный зубчатый статор 1 и подвижный элемент, состоящий из электромагнитных модулей 2, 3, 4 и 5. Каждый модуль включает в себя П-образные магнитопроводы 6 и 7. обмотку 8 управления и постоянный магнит 9 возбуждения. Зубцовые зоны статора 1 и подвижного элемента имеют одинаковый шаг t . Электромагнитные модули 2 и 3, 4 и 5, принадлежащие разным фазам, смещены относительно друг друга вдоль направления движения по (n ± 1 / 2 ) × t . Ферромагнитный зубчатый статор 1 и Побразные магнитопроводы 6 и 7 электромагнитных модулей, 2, 3, 4 и 5 подвижного элемента разделены на магнитопроводящие секции в направлении, перпендикулярном направлению движения. Взаимно смещены магнитопроводящие секции статора 1. При минимальном количестве магнитопроводящих секций (m = 2) секции 10 и 11 статора 1 взаимно смещены на t / 8 . При максимальном количестве магнитопроводящих секций ( m ® ¥ ) секции статора 1 смещены t относительно первой секции на ( j - 1) . В этом случае зубцовая зона статора 1 оказывается по существу 4m скошенной вдоль направления движения на t / 4 . Электромагнитные модули 2 и 4, 3 и 5, принадлежащие одной фазе, смещены относительно друг друга вдоль направления движения на (n ± 1 / 2 ) × t . Линейный индукторный двигатель работает следующим образом. Рассмотрим двигатель, выполненный с максимальным количеством секций. Управление двигателем осуществляется путем запитки его обмоток синусоидальным и косинусоидальным токами равной амплитуды 2p x - угол, определяющий положение подвижного элемента двигателя относительно статора. t х - линейное положение подвижного элемента. t - шаг з убцового деления рабочей зоны двигателя. io - амплитуда токов. Токи управления iA, iВ формируются в соответствии с информацией о положении подвижного элемента в каждый момент времени. Сила тяги регулируется с помощью амплитуды токов управления. Определим силу тяги, развиваемую двигателем. Воспользуемся следующей методикой расчета. где j = Введем понятие секции линейного индукторного двигателя, включающего в себя магнитопроводящую секцию статора и соответствующую ей секцию подвижного элемента. Определим силу тяги двигателя как сумму тяговых усилий, создаваемых секциями двигателя. Определим тяговое усилие первой секции двигателя в соответствии с известной методикой расчета электромагнитных модулей [1]. Получим, что между первыми секциями, электромагнитных модулей 2 и 3 и первой секцией статора 1 будут возникать тяговые усилия где K 1 = 9 0 + l m = l s , FA = W iA , FB = WiB ; l m и l s - вн утренняя магнитная проводимость и проводимость рассеяния постоянного магнита 9. Fm - МДС постоянного магнита 9, 90 и 91 - постоянная составляющая и амплитуда изменения магнитной проводимости зазора, W - число витков обмотки 8 управления. Поскольку тяговое усилие первой секции двигателя равно сумме тяговых усилий, создаваемых первыми секциями всех электромагнитных модулей, а тяговые усилия секций электромагнитных модулей 2 и 4, 3 и 5 равны, получим, что тяговое усилие, развиваемое первой секцией двигателя, равно В соответствии с полученным результатом для j-ой секции двигателя запишем, что Учитывая, что сила тяги двигателя равна сумме тяговых усилий всех секций двигателя, приходим к следующему результату: Выполнив при m ® ¥ переход от суммы к интегралу, получаем После подстановки в данное выражение значений токов управления (1) приходим к следующему выражению силы тяги: Двигатель развивает силу тяги, которая содержит, помимо основной составляющей, пропорциональной амплитуде 10 токов 1A и 1B, дополнительную методическую паразитную силу тяги, пропорциональную квадрату амплитуды токов. Поскольку методическая паразитная сила тяги уменьшается с уменьшением амплитуды токов в квадратичной зависимости, то в области малых значений силы тяги можно пренебречь влиянием этой паразитной силы на точность регулирования силы тяги. Следовательно, в области малых значений сила тяги, развиваемая двигателем, будет с достаточной степенью точности равна и точность регулирования силы тяги будет в полной мере определяться возникающей инструментальной паразитной силой тяги. Определим возникающую инстр ументальную паразитную силу тяги. Воспользуемся следующей методикой расчета. Определим инструментальную паразитную силу тяги двигателя как сумму паразитных тяговых усилий, создаваемых всеми секциями двигателя. Определим паразитное тяговое усилие секции двигателя как сумму паразитных тяговых усилий, создаваемых соответствующими секциями всех электромагнитных модулей. Примем, что паразитные тяговые усилия секций электромагнитных модулей совпадают по форме, но смещены относительно друг друга на соответствующие углы. Введем понятие паразитного тягового усилия Ф(j) , создаваемого электромагнитным модулем 2, когда магнитопроводящие cекции обеих частей двигателя выполнены без взаимного смещения вдоль направления движения. Примем, что паразитное тяговое усилие, создаваемое первой секцией электромагнитного модуля 2, равно Ф(j) . Получим, что инструментальная паразитная сила тяги двигателя будет равной Выполнив при m ® ¥ переход от суммы к интегралу, приходим к следующему результату: Для случая, когда электромагнитные модули 2 и 4,3 и 5. принадлежащие одной фазе, смещены относительно друг друга вдоль направления движения на целое число шагов, инструментальная паразитная сила тяги равна Теперь для сравнения определим тяговые характеристики известного двигателя [2]. Получим, что развиваемая сила тяги и возникающая инструментальная паразитная сила тяги соответственно равны Представим паразитное тяговое усилие Ф(j) в виде ряда Фурье, т.е. где fi и j i - амплитуда и начальное смещение 1-ой гармоники. Тогда выражение инструментальной паразитной силы тяги преобразуется к виду Из этого результата следует, что инстр ументальная паразитная сила тяги известного двигателя содержит все гармоники, характерные для паразитного тягового усилия Ф(j) , за исключением половины четных гармоник 1-2,6,10,14.... (6) Полученные результаты (2)-(6) непосредственно подтверждают преимущество предлагаемого линейного двигателя. Когда в предлагаемом двигателе электромагнитные модули 2 и 4, 3 и 5, принадлежащие одной фазе. взаимно смещены вдоль направления движения на целое число шагов t , то за счет сглаживания (см.(4)) исключаются все четные гармоники, характерные для паразитного тягового усилия Ф(j) . Когда же указанные электромагнитные модули взаимно смещены на (n ± 1 / 2 ) × t , то за счет сглаживания (см.(3)) исключаются все гармоники паразитного тягового усилия. При этом предлагаемый двигатель в сравнении с известным характеризуется более высоким коэффициентом пропорциональности между развиваемой силой тяги и амплитудой токов управления (см.(2) и (5), т.е. обладает более высокой удельной силой тяги.
ДивитисяДодаткова інформація
Назва патенту англійськоюLinear inductor motor
Автори англійськоюYaroslavtsev Mykhailo Ivanovych, Zilbert Ihor Mykhailovych, Volkov Hennadii Dmytrovych
Назва патенту російськоюЛинейный индукторный двигатель
Автори російськоюЯрославцев Михаил Иванович, Зильберт Игорь Михайлович, Волков Геннадий Дмитриевич
МПК / Мітки
МПК: H02K 41/03
Мітки: двигун, лінійний, індукторний
Код посилання
<a href="https://ua.patents.su/4-3221-linijjnijj-induktornijj-dvigun.html" target="_blank" rel="follow" title="База патентів України">Лінійний індукторний двигун</a>
Лінійний індукторний двигун
Номер патенту: 1825
Опубліковано: 20.12.1994
Автор: Ярославцев Михайло Іванович
МПК: H02K 41/02
Мітки: індукторний, лінійний, двигун
Формула / Реферат:
1. Линейный индукторный двигатель, содержащий ферромагнитный зубчатый статор и подвижный элемент, состоящий из фазных электромагнитных модулей, включающих в себя П-образные магнитопроводы, обмотки управления и постоянные магниты возбуждения, отличающийся тем, что, с целью повышения точности регулирования силы тяги, по крайней мере два магнитопроводящих элемента, принадлежащие одной фазе, смещены друг относительно друга вдоль направления...
Лінійний кроковий електродвигун
Номер патенту: 2137
Опубліковано: 26.12.1994
Автори: Гавдьо Ігор Романович, Ненека Мирослав Федорович, Завгородній Віктор Дмитрович
МПК: H02K 41/02
Мітки: електродвигун, лінійний, кроковий
Формула / Реферат:
Линейный шаговый электродвигатель, содержащий ферромагнитный зубчатый элемент с шагом зубцов tz и якорь, состоящий из охватывающего и охваченного двухполюсных сердечников с установленными на них обмотками управления постоянного магнита, расположенного между ярмами сердечников, причем на торцовых поверхностях стержней сердечников, обращенных к зубчатому элементу, выполнены группы зубцов с шагом tz, отличающийся тем, что, с целью улучшения...
Лінійний кроковий електродвигун

Номер патенту: 2136
Опубліковано: 26.12.1994
Автори: Завгородній Віктор Дмитрович, Ненека Мирослав Федорович
МПК: H02K 41/03
Мітки: електродвигун, лінійний, кроковий
Формула / Реферат:
Линейный шаговый электродвигатель, содержащий зубчатый ферромагнитный индуктор и якорь, состоящий из двух П-образных сердечников с зубчатыми полюсами, на которых расположены обмотки управления, и постоянного магнита, установленного между сердечниками, отличающийся тем, что, с целью повышения точности позиционирования, один П-образный сердечник расположен в другом с возможностью их взаимного смещения относительно полюсов, при этом...
Очисник рядків коренеплодів і міжрядь від гички
Номер патенту: 519
Опубліковано: 30.04.1993
Автори: Греченюк Станіслав Ілліч, Данильченко Михайло Григорович, Мартиненко Володимир Якимович, Дудка Віктор Васильович, Павлов Ярослав Антонович
МПК: A01D 23/02
Мітки: коренеплодів, міжрядь, гички, очисник, рядків
Формула / Реферат:
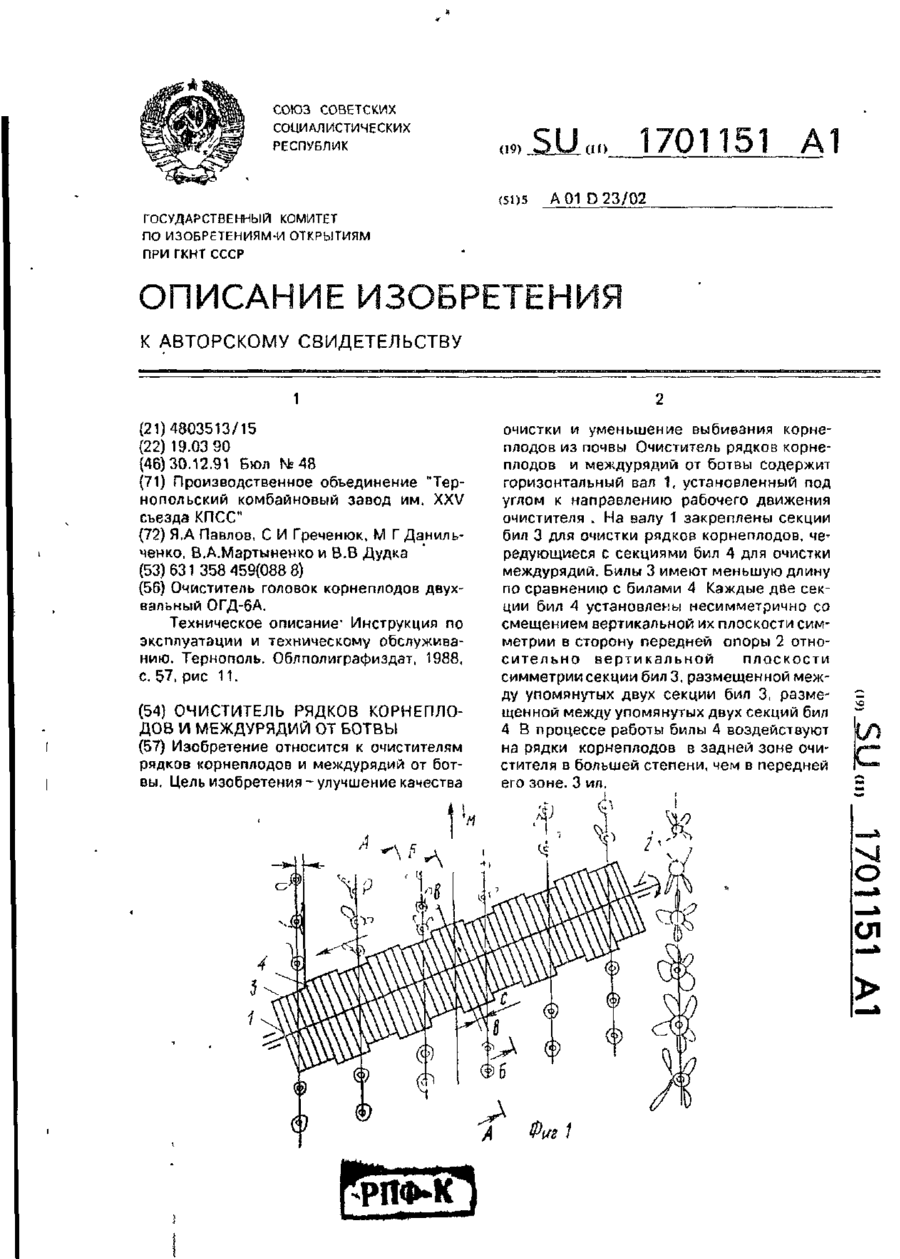
Формула изобретенияОчиститель рядков корнеплодов и междурядий от ботвы, включающий установленный на опоры горизонтально и под углом к направлению рабочего движения очистителя вал, несущий секции эластичных бил для очистки рядков корнеплодов, чередующиеся с секциями эластичных бил для очистки междурядий, при этом билы для очистки рядков имеют меньшую длину по сравнению с билами для очистки междурядий, отличающийся тем, что, с целью...
Вільнопоршневий двотактний двигун внутрішнього згоряння
Номер патенту: 232
Опубліковано: 30.04.1993
Автор: Краля Василь Іванович
МПК: F03B 1/00
Мітки: двигун, двотактний, внутрішнього, вільнопоршневий, згоряння
Формула / Реферат:
Формула изобретения 1. Свободно-поршневой двухтактный двигатель внутреннего сгорания, содержащий два параллельно расположенных цилиндра с поршнями, систему воздухо-снабжения и продувки-наполнения цилиндров, систему топливопитания с топливной форсункой и устройством управления подачей топлива, привод выходного вала с шестернями и обгонными муфтами, отличающийся тем, что, с целью уменьшения максимальных нагрузок в элементах привода...
Попередній патент: Спосіб магнітного збагачування слабомагнітних руд та сепаратор для його здійснення
Наступний патент: Прилад для визначення густини рідких середовищ
Випадковий патент: Оптоелектронний модуль