Лінійний індукторний двигун

Формула / Реферат
1. Линейный индукторный двигатель, содержащий ферромагнитный зубчатый статор и подвижный элемент, состоящий из фазных электромагнитных модулей, включающих в себя П-образные магнитопроводы, обмотки управления и постоянные магниты возбуждения, отличающийся тем, что, с целью повышения точности регулирования силы тяги, по крайней мере два магнитопроводящих элемента, принадлежащие одной фазе, смещены друг относительно друга вдоль направления движения.
2. Двигатель по п. 1, отличающийся тем, что смещение составляет угол (n ± 1/4) • 2p, где n — любое целое число.
3. Двигатель по пп. 1, 2, отличающийся тем, что указанное смещение осуществлено между магнитопроводами в электромагнитном модуле.
4. Двигатель по пп. 1, 2, отличающийся тем, что указанное смещение осуществлено между двумя электромагнитными модулями.
5. Двигатель по пп. 1, 2, отличающийся тем, что ферромагнитный зубчатый статор и магнитопроводы электромагнитных модулей разделены на секции в направлении, перпендикулярном направлению движения.
6. Двигатель по п. 5, отличающийся тем, что указанное смещение осуществлено между секциями магнитопровода.
7. Двигатель по п. 5, отличающийся тем, что указанное смещение осуществлено секциями магнитопроводов.
Текст
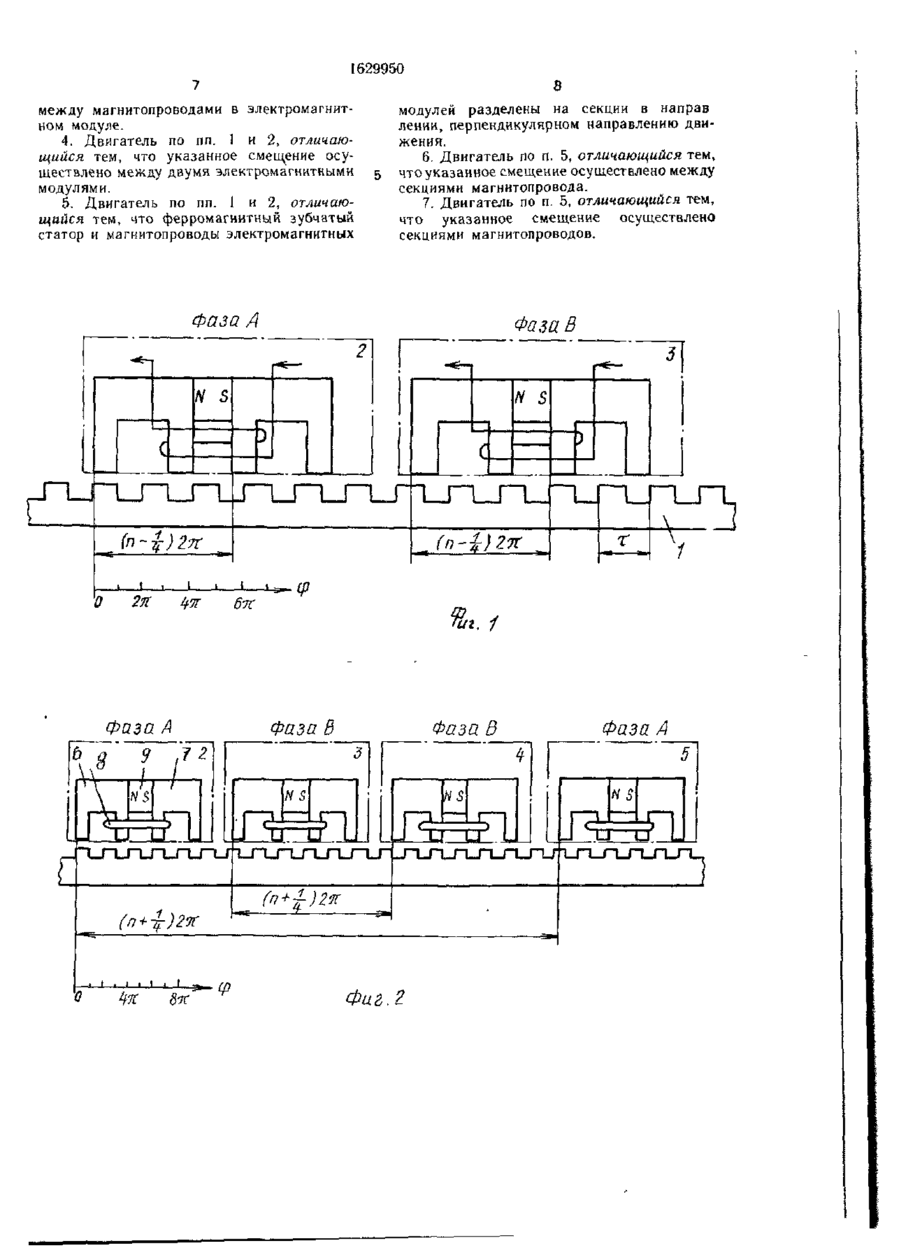
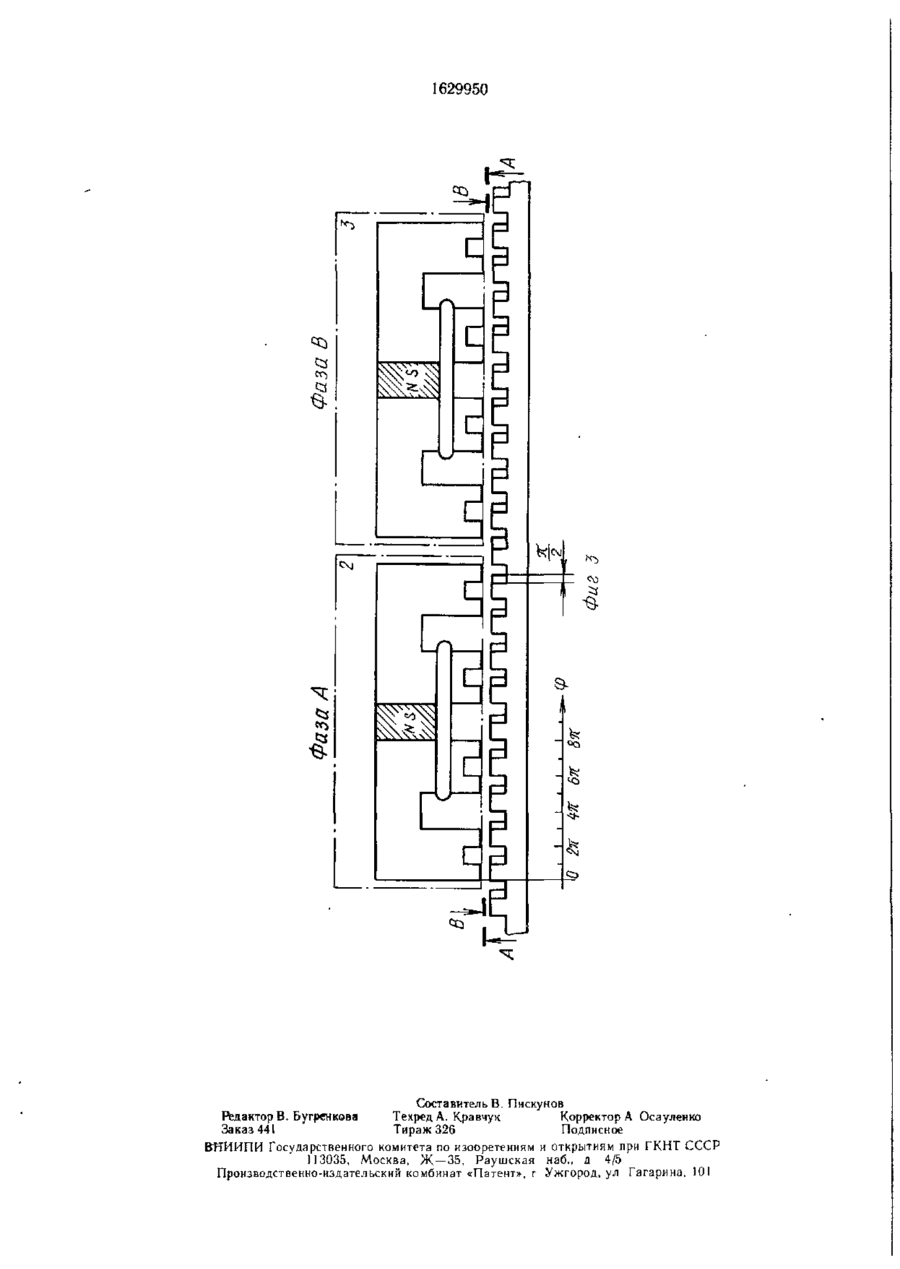
Изобретение относится к электротех нике и может быть использовано в линейном прецизионном электроприводе. Целью является повышение точности регулирования силы тяги. Двигатель состоит из зубчатого ферромагнитного статора и подвижного элемента, состоящего из фазных электромагнитных модулей. Каждый модуль включает в себя П-образные магнитопроводы, обмотку управления и постоянный магнит возбуждения. Магнитопроводы электромагнитных модулей и магнитопровод статора могут быть выполнены в виде секций. Положительный эффект достигается за счет того, что по крайней мере два магнитопроводящих элемента, принадлежащих одной фазе, смещены один относительно другого вдоль направления движения на угол (n-f+ 1/4) 2л, где n-любое целое число. 6 з.п. ф-лы, 3 ил if) С Изобретение относится к электротехнике и может быть использовано в линейном прецизионном электроприводе. Цель изобретения — повышение точности регулирования силы тяги. На фиг. 1—3 представлены конструктивные варианты двигателя. Двигатель содержит ферромагнитный зубчатый статор і и подвижный элемент, состоящий из фазных электромагнитных модулей 2—5. Каждый модуль включает в себя П-образные магнитопроводы 6 и 7, обмотку 8 управления и постоянный магнит 9 возбуждения. Магнитопроводы б и 7, магнитопровод статора 1 могут быть выполнены в виде секций 10 и И, 12 и 13, 14 и 15. По крайней мере два магнитопроводящих элемента, принадлежащие одной фазе, смещена друг относительно друга вдоль направления на угол п + 1/4)2л, где п — любое целое число. Магнитопроводящими элементами, принадлежащими одной фазе и смещенными друг относительно друга на угол (п±1/4)2л, где п любое целое число, могут быть магнитопроводы 6 и 7 в электромагнитных модулях 2 и 3 (фиг. 1), электромагнитные модули 2 и 5, 3 и 4( фиг. 2}, секции 14 и 15 магнитопровода статора 1, секции 10 и 11, 12 и 13 магнитопроводов 6 и 7 электромагнитных модулей 2 и 3 (фиг. 3). Обмотки двигателя запитываются токами управления. Создаваемый ими магнитный поток будет усиливать поток постоянных магнитов под соответствующими зубцами П-образных магнитопроводов. В результате этого будет возникать сила гяги, действующая на подвижный элемент двигателя. При запитке обмоток двигателя синусоидальными точами сл о 1629950 где ф=2л/тлг — угол, определяющий положение подвижного элемента двигателя относительно статора; х — линейное положение подвижного элемента; і — шаг зубцовой зоны двигателя; Ф — начальное смещение; і0 — амплитуда токов управления, представляется возможным управлять силой тяги двигателя с помощью регулирования амплитуды і0 токов управления Токи управления іА и ів формируются в соответствии с информацией о положении подвижного элемента двигателя в каждый момент времени. При подобном управлении известным линейным индуктором двигателем 1 формируемая сила тяги содержит основную составляющую, пропорциональную амплитуде токов управления, и дополнительную паразитную составляющую. Предлагаемый двигатель характеризуется более высокой точностью регулирования силы тяги Это достигается тем, что последовательно и циклично один из магнитопроводов создает усилие, противоположное направлению движения, за счет чего и достигается компенсация паразитной составляющей силы тяги В соответствии с известной методикой расчета электромагнитных модулей 2 строится схема замещения модуля. Рабочее усилие модуля представляется как сумма усилий, развиваемых его полюсами. Эти составляющие тягового усилия определяются параметрами схемы замещения модуля. Сначала определяют силу тяги, развиваемую первым двигателем (фиг. 1). Пол>чим,что фазные модули 2 и 3 будут развивать тяговые усилия С F =-* При формировании МДС С5 f =шл~ < двигатель будет развивать силу тяги 10 содержащую основную составляющую, про порциональную амплитуде токов управления и дополнительную паразитную составляющую. Далее определяют силу тяги, развиваемую вторым двигателем (фиг. 2). Модули- 2—5 будут развивать тяговые усилия соответственно равные =-4— F 2{F 20 £ —F 0j 25 n, где F 2 , F3, F4 и F5 — МДС обмоток управления модулей 2—5. 30 Поскольку однофазные модули 2 и 5,3 и 4 попарно запитываются одинаковыми токами, то, согласно полученному результату, двигатель будет развивать силу тяги 35 Следовательно, при формировании МДС 40 двигатель будет развивать силу тяги (2) Сила тяги пропорциональна амплитуде тр- л ков управления. Паразитная составляющая в, \ тяговом усилии двигателя отсутствует. і) 5 где FA и F A — МДС обмоток управления. Следовательно, полная сила тяги двигателя будет равной + FAcos(v+f)). 1П 15 (3) МДС обмоток управления FB =). при формировании двигатель развивает силу тяги (4) Сила тяги содержит основную составляющую, пропорциональную амплитуде токов управления, и паразитную составляющую. Вводят в рассмотрение коэффициент нестабильности г\, равный отношению амплитуды паразитной составляющей силы к основной. Согласно (4) получают, что Определяют коэффициенты нестабильности, характеризующие рассмотренные варианты предлагаемого двигателя. В соответствии с (1) и (2) получают Ц, Г|2=ТІЗ=О. Полученный результат непосредственно подтверждает преимущественно второго и третьего вариантов предлагаемого двигателя, поскольку их коэффициент нестабильности равен нулю. Преимущество первого варианта двигателя перед известным двигателем реализуется, когда т. е. когда сумма внутренней магнитной проводимости Хт постоянного магнита и проводимость его рассеяния А меньше постоянб ной составляющей магнитной проводимости рабочего зазора g0. В настоящее время нашли широкое применение постоянные магниты на основе ферритов бария, редкоземельных металлов (РЗМ). Магнитная проницаемость вещества таких магнитов близка к проницаемости воздуха. Поскольку для линейных индукторных двигателей характерно, что зазор в зубцовой зоне двигателя гораздо меньше толщины используемых постоянных магнитов, то требуемое неравенство (5) всегда будет иметь место. Таким образом, предлагаемый линейный индукторный двигатель обладает преимуществом перед известным двигателем, поскольку характеризуется более высокой точностью регулирования силы тяги. При этом первый вариант двигателя является наиболее простым конструктивно. Второй вариант двигателя обладает тем отличительным свойством, что при наличии ограничения на ширину двигателя он позволяет добиться наибольшей силы тяги. Смещение секций магнитопроводов дает возможность получить точность регулирования силы тяги, достигаемую путем удвоения количества модулей и соответствующего их взаимного смещения. Смешение секций магнитопроводов электромагнитов модулей либо секций статора выбирается с учетом конструктивных особенностей разрабатываемого оборудования на базе линейных двигателей и технологии изготовления. Формула изобретения 1. Линейный индукторный двигатель, со45 держащий ферромагнитный зубчатый статор и подвижный элемент7состоящий из фазных электромагнитных модулей, включающих в себя П-образные магнитопроводы, обмотки управления и постоянные магниты возбуждения, отличающийся тем, что, с целью по50 вышения точности регулирования силы тяги, по крайней мере два магнитопроводящих элемента, принадлежащие одной фазе, смещены друг относительно друга вдоль направления движения 2. Двигатель по п. 1, отличающийся 55 тем, что смещение составляет угол ( л ± ± 1 / 4 ) - 2 л , где п — любое целое число. 3. Двигатель по пп. 1 и 2, отличающийся тем, что указанное смещение осуществлено 1629950 8 между магнитопроводами в электромагнитном модуле. 4. Двигатель по пп. 1 и 2, отличающийся тем, что указанное смещение осуществлено между двумя электромагнитными модулями. 5. Двигатель по пп. 1 и 2, отличающийся тем, что ферромагнитный зубчатый статор и магнитопроводы электромагнитных модулей разделены на секции в направ лении, перпендикулярном направлению движения. 6. Двигатель по п. 5, отличающийся тем, что указанное смещение осуществлено между секциями магнитопровода. 7. Двигатель по п. 5, отличающийся тем, что указанное смещение осуществлено секциями магнитопроводов. Фаза А 0 Фаза В 2Ж иг, і Фаза А 0 Ц% Ь-к Фаза В Фаза В Фиг. 2 Фаза А 1629950 Составитель В. Пискунов Редактор В. Бугренкова Техред А. Кравчук Корректор А Осауленко Заказ 441 Тираж 326 Подписное ВНИИПИ Государственного комитета по изооретениям и открытиям при ГКНТ СССР 113035, Москва. Ж —35, Раушская наб., д 4/5 Производственно-издательский комбинат «Патент», г Ужгород, ул Гагарина, 101
ДивитисяДодаткова інформація
Назва патенту англійськоюLinear inductor motor
Автори англійськоюYaroslavtsev Mykhailo Ivanovych
Назва патенту російськоюЛинейный индукторный двигатель
Автори російськоюЯрославцев Михаил Иванович
МПК / Мітки
МПК: H02K 41/02
Мітки: індукторний, лінійний, двигун
Код посилання
<a href="https://ua.patents.su/6-1825-linijjnijj-induktornijj-dvigun.html" target="_blank" rel="follow" title="База патентів України">Лінійний індукторний двигун</a>
Вільнопоршневий двотактний двигун внутрішнього згоряння
Номер патенту: 232
Опубліковано: 30.04.1993
Автор: Краля Василь Іванович
МПК: F03B 1/00
Мітки: згоряння, вільнопоршневий, двотактний, двигун, внутрішнього
Формула / Реферат:
Формула изобретения 1. Свободно-поршневой двухтактный двигатель внутреннего сгорания, содержащий два параллельно расположенных цилиндра с поршнями, систему воздухо-снабжения и продувки-наполнения цилиндров, систему топливопитания с топливной форсункой и устройством управления подачей топлива, привод выходного вала с шестернями и обгонными муфтами, отличающийся тем, что, с целью уменьшения максимальных нагрузок в элементах привода...
Двигун внутрішнього згоряння
Номер патенту: 83
Опубліковано: 30.04.1993
Автор: Левченко Федір Юхимович
МПК: F02B 75/00, F02B 41/00
Мітки: внутрішнього, згоряння, двигун
Формула / Реферат:
Формула изобретенияДвигатель внутреннего сгорания, содержащий, по меньшей мере, одну пару цилиндров с возвратно-поступательно движущимися поршнями и головку, в которой размещен, по меньшей мере, один периодически сообщающийся с цилиндрами газораспределительный цилиндрический золотник, снабженный общей для обоих цилиндров камерой сгорания и кинематически связанный с коленчатым валом двигателя, отличающийся тем, что с целью повышения...
Газотурбінний двигун
Номер патенту: 1355
Опубліковано: 25.03.1994
Автор: Якубов Анатолій Михайлович
МПК: F01D 1/24
Мітки: двигун, газотурбінний
Формула / Реферат:
1. Газотурбинный двигатель, содержащий кожух, вал, установленные на нем с возможностью вращения в противоположных направлениях два диска с турбинными и размещенными под ними компрессорными лопатками, камеру сгорания, топливную емкость с выходным патрубком и форсунками, выполненную между кожухом и дисками кольцевую полость для подвода охлаждающего воздуха, отличающийся тем, что он снабжен сальниковым уплотнением, системой охлаждения и...
Повітряно-реактивний двигун
Номер патенту: 821
Опубліковано: 01.01.1993
Автор: Борисенко Іван Ілліч
МПК: F02K 7/00
Мітки: двигун, повітряно-реактивний
Формула / Реферат:
Воздушно-реактивный двигатель, содержащий входной безлопаточный радиально-осевой диффузор, кольцевую камеру сгорания, расположенную в обечайке двигателя, вихревую камеру смешения, выходное реактивное сопло с центральным телом и со спрямляющим аппаратом, перепускной канал для забора воздуха в камеру сгорания в сечении перед соплом, отличающийся тем, что входной диффузор снабжен цилиндрическим насадком, скрепленным с выходным сечением камеры...
Двигун внутрішнього згоряння
Номер патенту: 94
Опубліковано: 30.04.1993
Автори: Благута Анатолій Олександрович, Благута Оксана Анатольївна
МПК: F02M 25/06, F01N 3/04
Мітки: згоряння, двигун, внутрішнього
Формула / Реферат:
Формула изобретенияДвигатель внутреннего сгорания, содержащий впускную систему, системы охлаждения с радиатором и выпускную систему с камерой нейтрализации отработавших газов, сообщенной с впускной системой и атмосферой, отличающий-с я тем, что, с целью снижения токсичности он снабжен емкостью с водой, испарительной камерой и регулятором уровня воды в радиаторе, причем емкость с водой соединена через трубопровод с радиатором,...
Попередній патент: Пристрій для виштовхування акумуляторних пластин
Наступний патент: Пристрій для формовки і обрізки виводів радіоелементів
Випадковий патент: Спосіб кількісного визначення аміналону