Спосіб автоматичного регулювання напруги генератора
Номер патенту: 3527
Опубліковано: 15.11.2004
Автори: ТРОНЬ ЮРІЙ ОПАНАСОВИЧ, Збруцький Олександр Васильович, Прохорчук Олександр Віталійович
Формула / Реферат
Спосіб автоматичного регулювання напруги генератора, який полягає в тому, що формують сигнал завдання, пропорційний заданій напрузі генератора, вимірюють напругу на виході генератора, отримане значення порівнюють з сигналом завдання і формують сигнал похибки регулювання, який відрізняється тим, що результат порівняння подають на вхід моделі, сигнал, пропорційний сигналу на виході моделі, алгебраїчно підсумовують із сигналом завдання, результат порівняння підсилюють і формують додаткову частоту обертання, пропорційну отриманому сигналу, а частоту обертання генератора одержують як алгебраїчну суму основної постійної частоти обертання і додаткової регульованої частоти обертання генератора, причому коефіцієнт пропорційності дорівнює
![]() ,
,
де ![]() - коефіцієнт передачі по керуючому впливу,
- коефіцієнт передачі по керуючому впливу,
а коефіцієнт підсилення моделі задають у вигляді
![]() ,
,
де ![]() - сигнал завдання;
- сигнал завдання;
![]() - значення номінального навантаження;
- значення номінального навантаження;
![]() - коефіцієнт, що визначає статизм зовнішньої характеристики генератора;
- коефіцієнт, що визначає статизм зовнішньої характеристики генератора;
![]() - необхідний статизм системи.
- необхідний статизм системи.
Текст
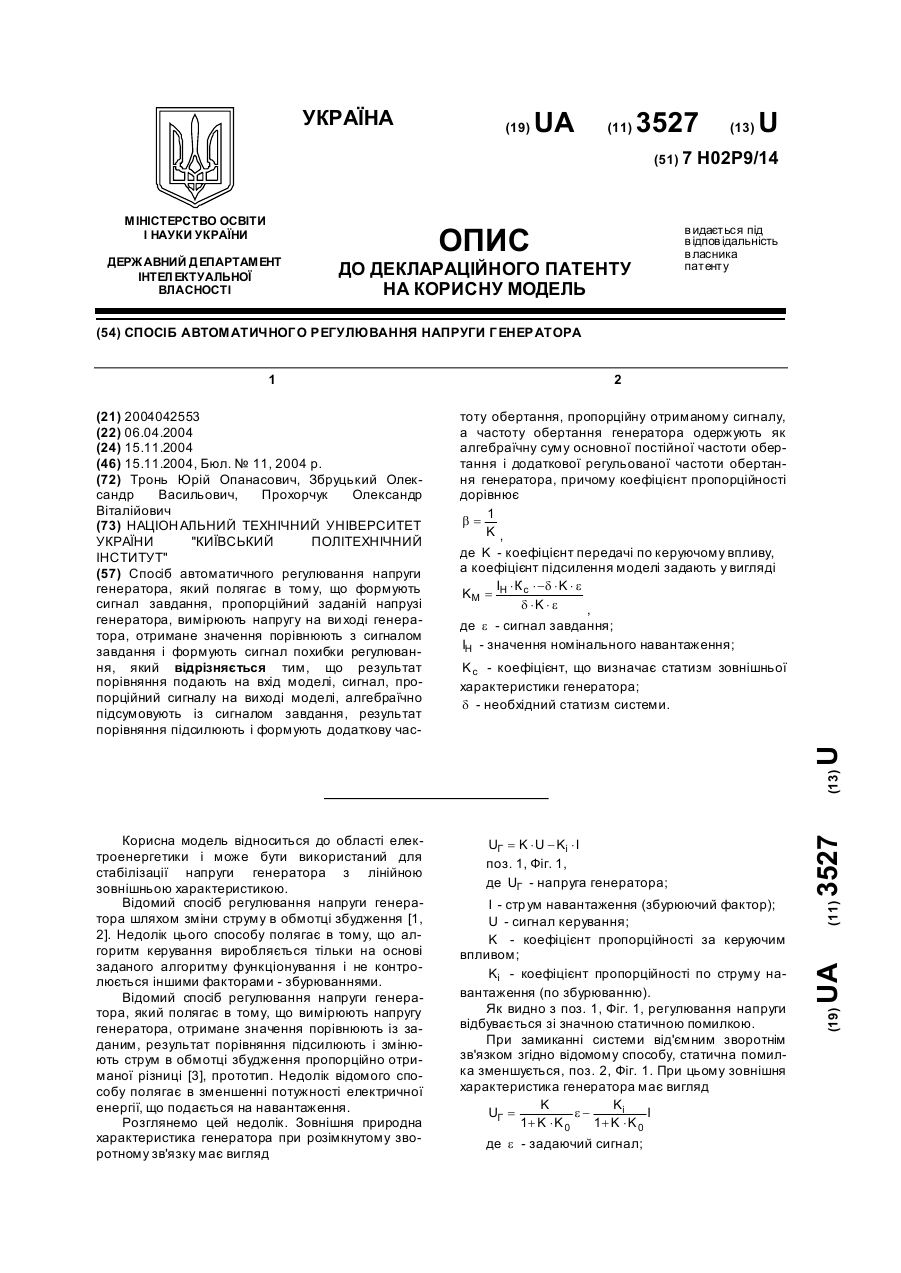
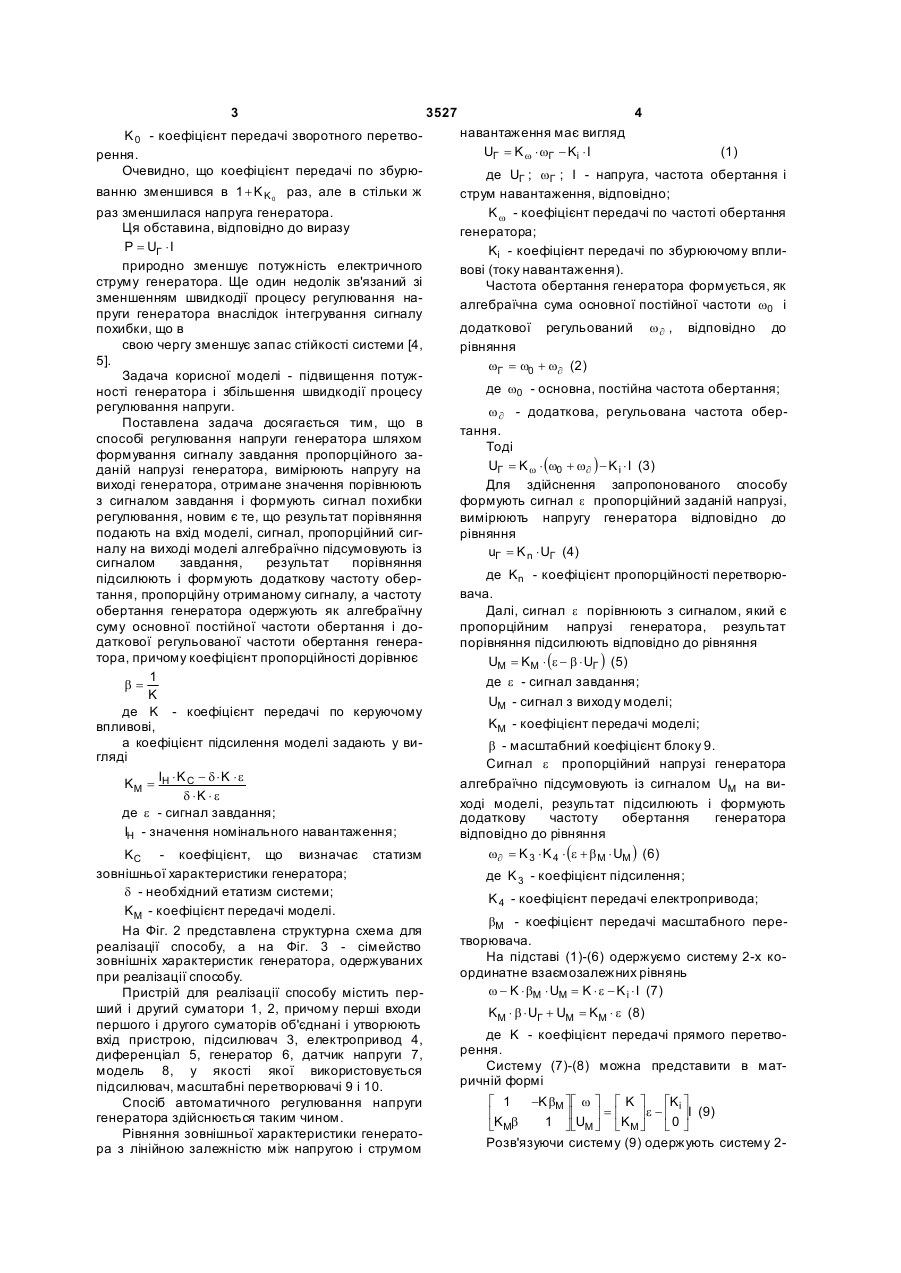
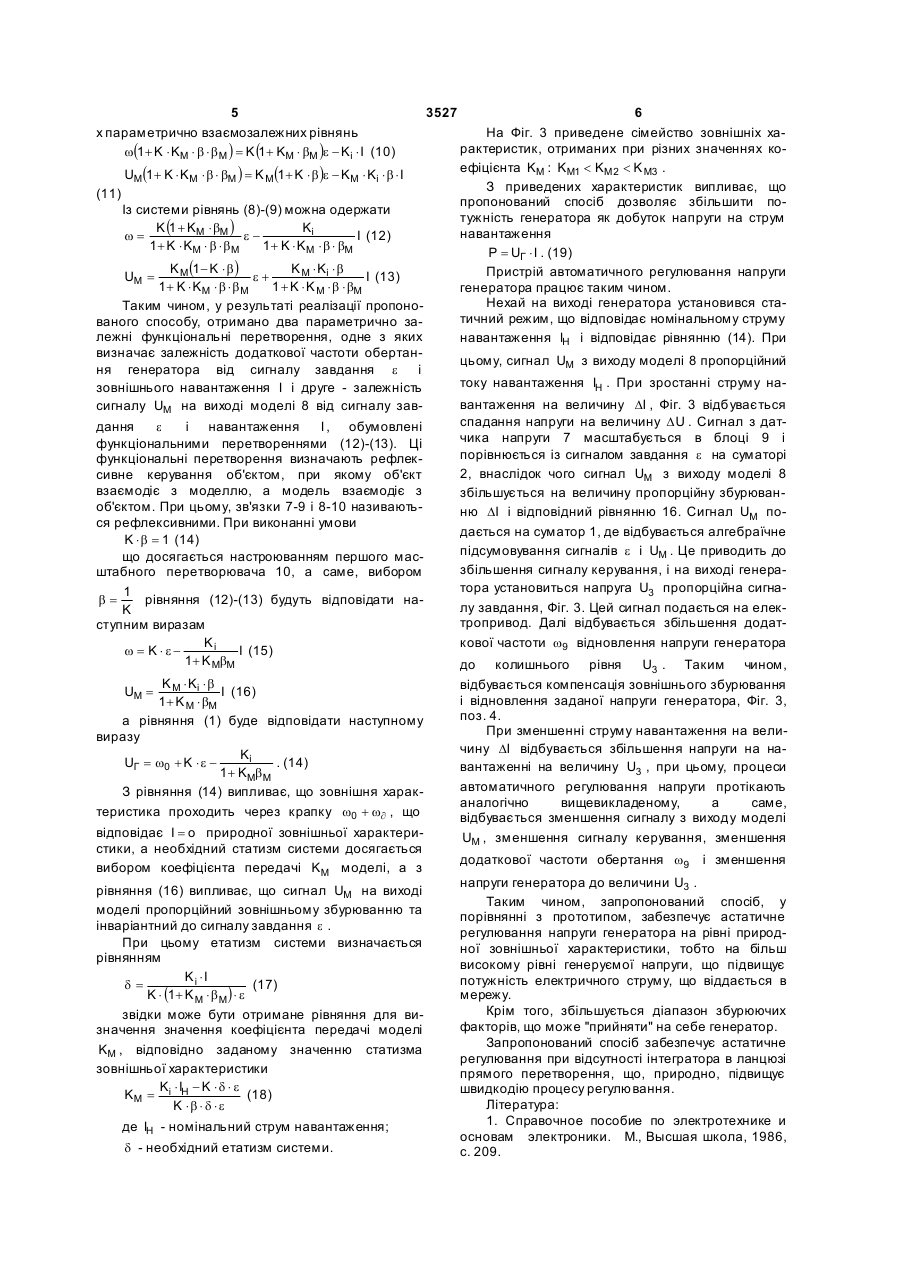
Спосіб автоматичного регулювання напруги генератора, який полягає в тому, що формують сигнал завдання, пропорційний заданій напрузі генератора, вимірюють напругу на ви ході генератора, отримане значення порівнюють з сигналом завдання і формують сигнал похибки регулювання, який відрізняється тим, що результат порівняння подають на вхід моделі, сигнал, пропорційний сигналу на виході моделі, алгебраїчно підсумовують із сигналом завдання, результат порівняння підсилюють і формують додаткову час 2 3 K 0 - коефіцієнт передачі зворотного перетворення. Очевидно, що коефіцієнт передачі по збурюванню зменшився в 1 + K K 0 раз, але в стільки ж раз зменшилася напруга генератора. Ця обставина, відповідно до виразу P = UГ × I природно зменшує потужність електричного струму генератора. Ще один недолік зв'язаний зі зменшенням швидкодії процесу регулювання напруги генератора внаслідок інтегрування сигналу похибки, що в свою чергу зменшує запас стійкості системи [4, 5]. Задача корисної моделі - підвищення потужності генератора і збільшення швидкодії процесу регулювання напруги. Поставлена задача досягається тим, що в способі регулювання напруги генератора шляхом формування сигналу завдання пропорційного заданій напрузі генератора, вимірюють напругу на виході генератора, отримане значення порівнюють з сигналом завдання і формують сигнал похибки регулювання, новим є те, що результат порівняння подають на вхід моделі, сигнал, пропорційний сигналу на виході моделі алгебраїчно підсумовують із сигналом завдання, результат порівняння підсилюють і формують додаткову частоту обертання, пропорційну отриманому сигналу, а частоту обертання генератора одержують як алгебраїчну суму основної постійної частоти обертання і додаткової регульованої частоти обертання генератора, причому коефіцієнт пропорційності дорівнює 1 b= K де K - коефіцієнт передачі по керуючому впливові, а коефіцієнт підсилення моделі задають у вигляді I ×K - d×K ×e KM = H C d ×K × e де e - сигнал завдання; IH - значення номінального навантаження; KC - коефіцієнт, що визначає статизм зовнішньої характеристики генератора; d - необхідний етатизм системи; KM - коефіцієнт передачі моделі. На Фіг. 2 представлена структурна схема для реалізації способу, а на Фіг. 3 - сімейство зовнішніх характеристик генератора, одержуваних при реалізації способу. Пристрій для реалізації способу містить перший і другий суматори 1, 2, причому перші входи першого і другого суматорів об'єднані і утворюють вхід пристрою, підсилювач 3, електропривод 4, диференціал 5, генератор 6, датчик напруги 7, модель 8, у якості якої використовується підсилювач, масштабні перетворювачі 9 і 10. Спосіб автоматичного регулювання напруги генератора здійснюється таким чином. Рівняння зовнішньої характеристики генератора з лінійною залежністю між напругою і струмом 3527 4 навантаження має вигляд UГ = K w × wГ - Ki × I (1) де UГ ; wГ ; І - напруга, частота обертання і струм навантаження, відповідно; K w - коефіцієнт передачі по частоті обертання генератора; Ki - коефіцієнт передачі по збурюючому впливові (току навантаження). Частота обертання генератора формується, як алгебраїчна сума основної постійної частоти w0 і додаткової регульований рівняння wГ = w0 + w¶ (2) w¶ , відповідно до де w0 - основна, постійна частота обертання; w ¶ - додаткова, регульована частота обертання. Тоді UГ = K w × (w0 + w¶ ) - K i × I (3) Для здійснення запропонованого способу формують сигнал e пропорційний заданій напрузі, вимірюють напругу генератора відповідно до рівняння uГ = K n × UГ (4) де Kn - коефіцієнт пропорційності перетворювача. Далі, сигнал e порівнюють з сигналом, який є пропорційним напрузі генератора, результат порівняння підсилюють відповідно до рівняння UM = KM × (e - b × UГ ) (5) де e - сигнал завдання; UM - сигнал з виходу моделі; KM - коефіцієнт передачі моделі; b - масштабний коефіцієнт блоку 9. Сигнал e пропорційний напрузі генератора алгебраїчно підсумовують із сигналом UM на виході моделі, результат підсилюють і формують додаткову частоту обертання генератора відповідно до рівняння w¶ = K 3 × K 4 × (e + b M × UM ) (6) де K 3 - коефіцієнт підсилення; K 4 - коефіцієнт передачі електропривода; bM - коефіцієнт передачі масштабного перетворювача. На підставі (1)-(6) одержуємо систему 2-х координатне взаємозалежних рівнянь w - K × bM × UM = K × e - K i × I (7) KM × b × UГ + UM = KM × e (8) де K - коефіцієнт передачі прямого перетворення. Систему (7)-(8) можна представити в матричній формі é 1 -K bM ù é w ù é K ù éKi ù I (9) ê úê ú = ê úe 1 û ëUM û ë KM û ê 0 ú ëKMb ë û Розв'язуючи систему (9) одержують систему 2 5 х параметрично взаємозалежних рівнянь w(1+ K × KM × b × b M ) = K (1+ KM × bM )e - Ki × I (10) UM(1+ K × KM × b × bM ) = K M(1+ K × b )e - KM × Ki × b × I (11) Із системи рівнянь (8)-(9) можна одержати K (1 + KM × bM ) Ki w= eI (12) 1+ K × KM × b × b M 1+ K × KM × b × bM K M(1- K × b ) K M × Ki × b e+ I (13) 1+ K × KM × b × b M 1 + K × K M × b × bM Таким чином, у результаті реалізації пропонованого способу, отримано два параметрично залежні функціональні перетворення, одне з яких визначає залежність додаткової частоти обертання генератора від сигналу завдання e і зовнішнього навантаження I і друге - залежність сигналу UM на виході моделі 8 від сигналу завUM = дання e і навантаження I , обумовлені функціональними перетвореннями (12)-(13). Ці функціональні перетворення визначають рефлексивне керування об'єктом, при якому об'єкт взаємодіє з моделлю, а модель взаємодіє з об'єктом. При цьому, зв'язки 7-9 і 8-10 називаються рефлексивними. При виконанні умови K × b = 1 (14) що досягається настроюванням першого масштабного перетворювача 10, а саме, вибором 1 b= рівняння (12)-(13) будуть відповідати наK ступним виразам Ki w = K×eI (15) 1+ K MbM K ×K ×b UM = M i I (16) 1+ K M × bM а рівняння (1) буде відповідати наступному виразу Ki UГ = w0 + K × e . (14) 1+ KMb M З рівняння (14) випливає, що зовнішня характеристика проходить через крапку w0 + w¶ , що відповідає I = o природної зовнішньої характеристики, а необхідний статизм системи досягається вибором коефіцієнта передачі KM моделі, а з рівняння (16) випливає, що сигнал UM на виході моделі пропорційний зовнішньому збурюванню та інваріантний до сигналу завдання e . При цьому етатизм системи визначається рівнянням Ki ×I d= (17) K × (1+ K M × b M) × e звідки може бути отримане рівняння для визначення значення коефіцієнта передачі моделі KM , відповідно заданому значенню статизма зовнішньої характеристики K ×I - K ×d × e KM = i H (18) K ×b × d ×e де IH - номінальний струм навантаження; d - необхідний етатизм системи. 3527 6 На Фіг. 3 приведене сімейство зовнішніх характеристик, отриманих при різних значеннях коефіцієнта KM : KM1 < KM2 < K M3 . З приведених характеристик випливає, що пропонований спосіб дозволяє збільшити потужність генератора як добуток напруги на струм навантаження P = UГ × І . (19) Пристрій автоматичного регулювання напруги генератора працює таким чином. Нехай на виході генератора установився статичний режим, що відповідає номінальному струму навантаження ІН і відповідає рівнянню (14). При цьому, сигнал UM з виходу моделі 8 пропорційний току навантаження ІН . При зростанні струму навантаження на величину DI , Фіг. 3 відбувається спадання напруги на величину D U . Сигнал з датчика напруги 7 масштабується в блоці 9 і порівнюється із сигналом завдання e на суматорі 2, внаслідок чого сигнал UM з виходу моделі 8 збільшується на величину пропорційну збурюванню DI і відповідний рівнянню 16. Сигнал UM подається на суматор 1, де відбувається алгебраїчне підсумовування сигналів e і UM . Це приводить до збільшення сигналу керування, і на виході генератора установиться напруга U3 пропорційна сигналу завдання, Фіг. 3. Цей сигнал подається на електропривод. Далі відбувається збільшення додаткової частоти w9 відновлення напруги генератора до колишнього рівня U3 . Таким чином, відбувається компенсація зовнішнього збурювання і відновлення заданої напруги генератора, Фіг. 3, поз. 4. При зменшенні струму навантаження на величину DI відбувається збільшення напруги на навантаженні на величину U3 , при цьому, процеси автоматичного регулювання напруги протікають аналогічно вищевикладеному, а саме, відбувається зменшення сигналу з виходу моделі UM , зменшення сигналу керування, зменшення додаткової частоти обертання w9 і зменшення напруги генератора до величини U3 . Таким чином, запропонований спосіб, у порівнянні з прототипом, забезпечує астатичне регулювання напруги генератора на рівні природної зовнішньої характеристики, тобто на більш високому рівні генеруємої напруги, що підвищує потужність електричного струму, що віддається в мережу. Крім того, збільшується діапазон збурюючих факторів, що може "прийняти" на себе генератор. Запропонований спосіб забезпечує астатичне регулювання при відсутності інтегратора в ланцюзі прямого перетворення, що, природно, підвищує швидкодію процесу регулювання. Література: 1. Справочное пособие по электротехнике и основам электроники. М., Высшая школа, 1986, с. 209. 7 3527 8 2. Волков Н.И. Миловзоров В.П. Электрома1986, с. 21-23. шинные устройства автоматики. Издание второе, 4. Макаров И.М., Менский Б.М. Линейные авпереработанное и дополненное. М., Высшая шкотоматические системы. М., Машиностроение, ла, 1986, с. 20. 1977, с. 298. 3. Теория автоматического регулирования в 5. Бесекерский В. А. Лекции по теории автомадвух частя х. Под редакцией академика А.А. Воротического регулирования. ЛКВВИА, Ленинград, нова. Часть первая. Теория линейных систем ав1962,с. 243. томатического управления. М., Высшая школа, Комп’ютерна в ерстка М. Клюкін Підписне Тираж 37 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Автори англійськоюZbrutskyi Oleksandr Vasyliovych
Автори російськоюЗбруцкий Александр Васильевич
МПК / Мітки
МПК: H02P 9/14
Мітки: регулювання, напруги, автоматичного, генератора, спосіб
Код посилання
<a href="https://ua.patents.su/4-3527-sposib-avtomatichnogo-regulyuvannya-naprugi-generatora.html" target="_blank" rel="follow" title="База патентів України">Спосіб автоматичного регулювання напруги генератора</a>
Спосіб регулювання напруги синхронного генератора з високочастотним збудником
Номер патенту: 65910
Опубліковано: 15.04.2004
Автори: Березовенко Олександр Валентинович, Шайтор Микола Михайлович
МПК: H03L 5/00
Мітки: напруги, спосіб, регулювання, високочастотним, синхронного, генератора, збудником
Формула / Реферат:
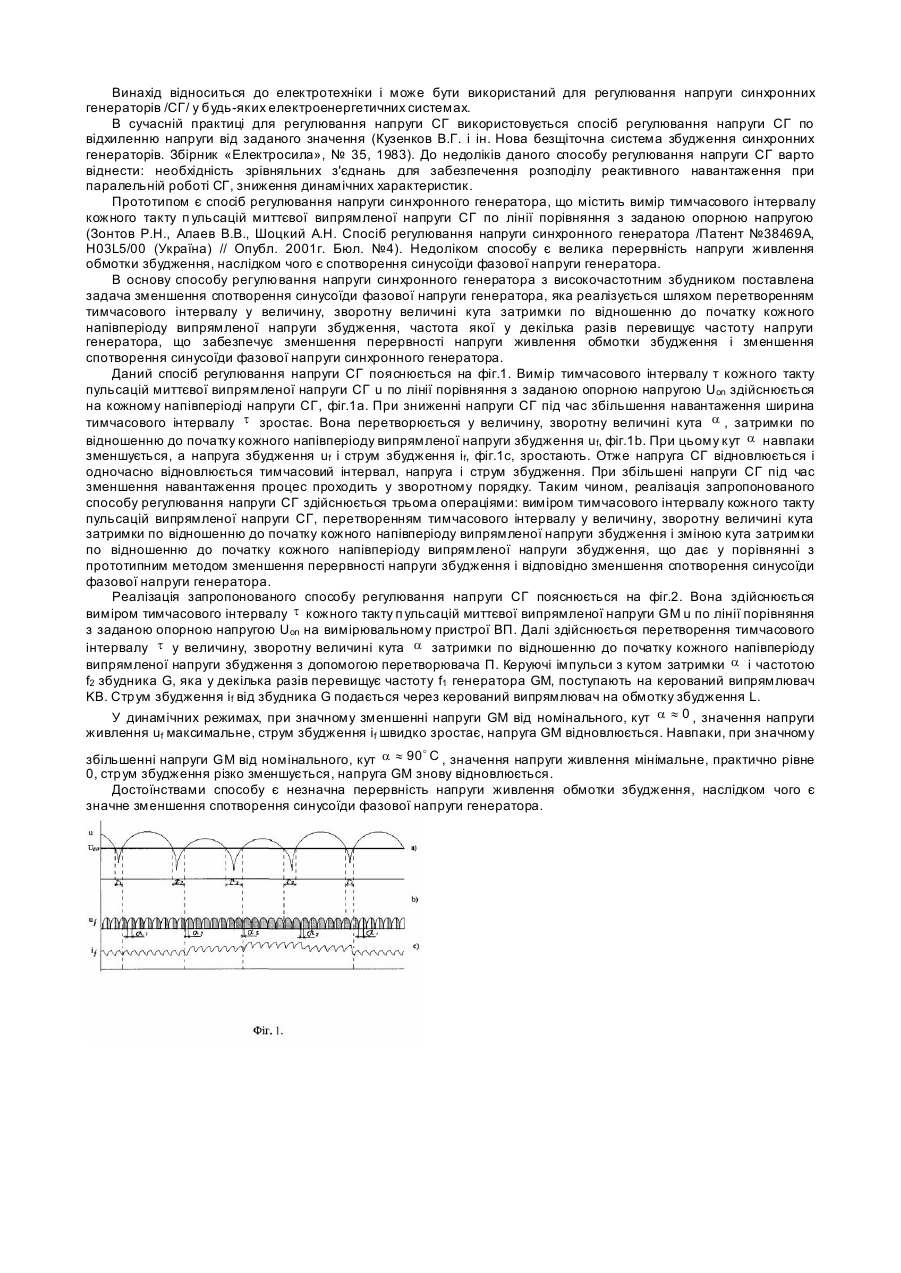
Спосіб регулювання напруги синхронного генератора з високочастотним збудником, що включає вимір часового інтервалу кожного такту пульсацій миттєвої випрямленої напруги синхронного генератора по лінії порівняння з заданою опорною напругою, який відрізняється тим, що перетворюють часовий інтервал у величину, зворотну величині кута затримки по відношенню до початку кожного напівперіоду випрямленої напруги збудження, частота якої у декілька разів...
Спосіб регулювання напруги синхронного генератора
Номер патенту: 38469
Опубліковано: 15.05.2001
Автори: Алаєв Віктор Васильович, Шоцький Олександр Миколайович, Зонтов Роман Миколайович
МПК: H03L 5/00
Мітки: синхронного, регулювання, спосіб, генератора, напруги
Текст:
...при значному зменшенні напруга СГ від номінального значення напруга живлення постійно підключена до обмотки збудження, струм збудження зростає, напруга СГ відновлюється. Навпаки, при значному збільшенні напруги СГ від номінального значення напруга живлення відключена від обмотки збудження, струм збудження зменшується, напруга СТ відновлюється. Реальними параметрами способу є: 1. Кількість тактів випрямлення напруги СГ і, отже, частота подачі...
Спосіб регулювання напруги синхронного генератора
Номер патенту: 64495
Опубліковано: 16.02.2004
Автори: Шоцький Олександр Миколайович, Алаєв Віктор Васильович
МПК: H03L 5/00
Мітки: генератора, спосіб, напруги, синхронного, регулювання
Формула / Реферат:
Спосіб регулювання напруги синхронного генератора шляхом виміру тимчасових інтервалів кожного такту пульсацій миттєвої випрямленої напруги синхронного генератора по лінії порівняння з заданою опорною напругою і подачею по цих тимчасових інтервалах на обмотку збудження імпульсів напруги живлення, який відрізняється тим, що вимірюють cos синхронного генератора і коректують...
Пристрій для регулювання напруги генератора постійного струму
Номер патенту: 22231
Опубліковано: 30.06.1998
Автори: Дадівєрін Іван Георгійович, Імерелі Володимир Борисович, Молотов Віктор Тимофійович, Березовський Павло Йосипович
МПК: H02P 9/00
Мітки: генератора, регулювання, струму, пристрій, напруги, постійного
Формула / Реферат:
Пристрій для регулювання найрути генератора постійного струму, який складається з модулятора ширини імпульсів, задатчика напруги, ключового підсилювача потужності і обмотки збудження генератора постійного струму, який відрізняється тим, що модулятор ширини імпульсів складається з генератора тактових імпульсів і одновібратора з імпульсним пусковим і потенціальним часозадаючим входами, причому імпульсний пусковий вхід одновібратора...
Спосіб регулювання напруги асинхронного вентільного генератора з короткозамкненим ротором
Номер патенту: 7773
Опубліковано: 26.12.1995
Автори: Колесніченко Олександр Владимірович, Пасс Анатолій Єгорович, Вишневський Леонід Вікторович
МПК: H02P 9/00
Мітки: спосіб, генератора, асинхронного, напруги, вентільного, ротором, короткозамкненим, регулювання
Формула / Реферат:
Способ регулирования напряжения асинхронного вентильного генератора с короткозамкнутым ротором, заключающийся в том, что измеряют напряжение на выходе генератора, сравнивают его с заданным и формируют сигнал рассогласования, коммутируют вентили тиристорного источника реактивной мощности, отличающийся тем, что, с целью повышения динамической точности и устойчивости процесса регулирования, выделяют основную гармонику фазного напряжения на...
Попередній патент: Валок до пристрою для термообробки листових матеріалів
Наступний патент: Пристрій для розпилювання кристалів
Випадковий патент: Носій для довготермінового зберігання інформації