Автокомпенсатор завад цифровий
Номер патенту: 38495
Опубліковано: 15.09.2003
Автори: Піза Дмитро Макарович, КОПНОВ МИХАЙЛО ОЛЕКСАНДРОВИЧ, Немчин Олександр Федорович, Мирошниченко Михайло Іванович, Мокеєв Юрій Генадійович

Формула / Реферат
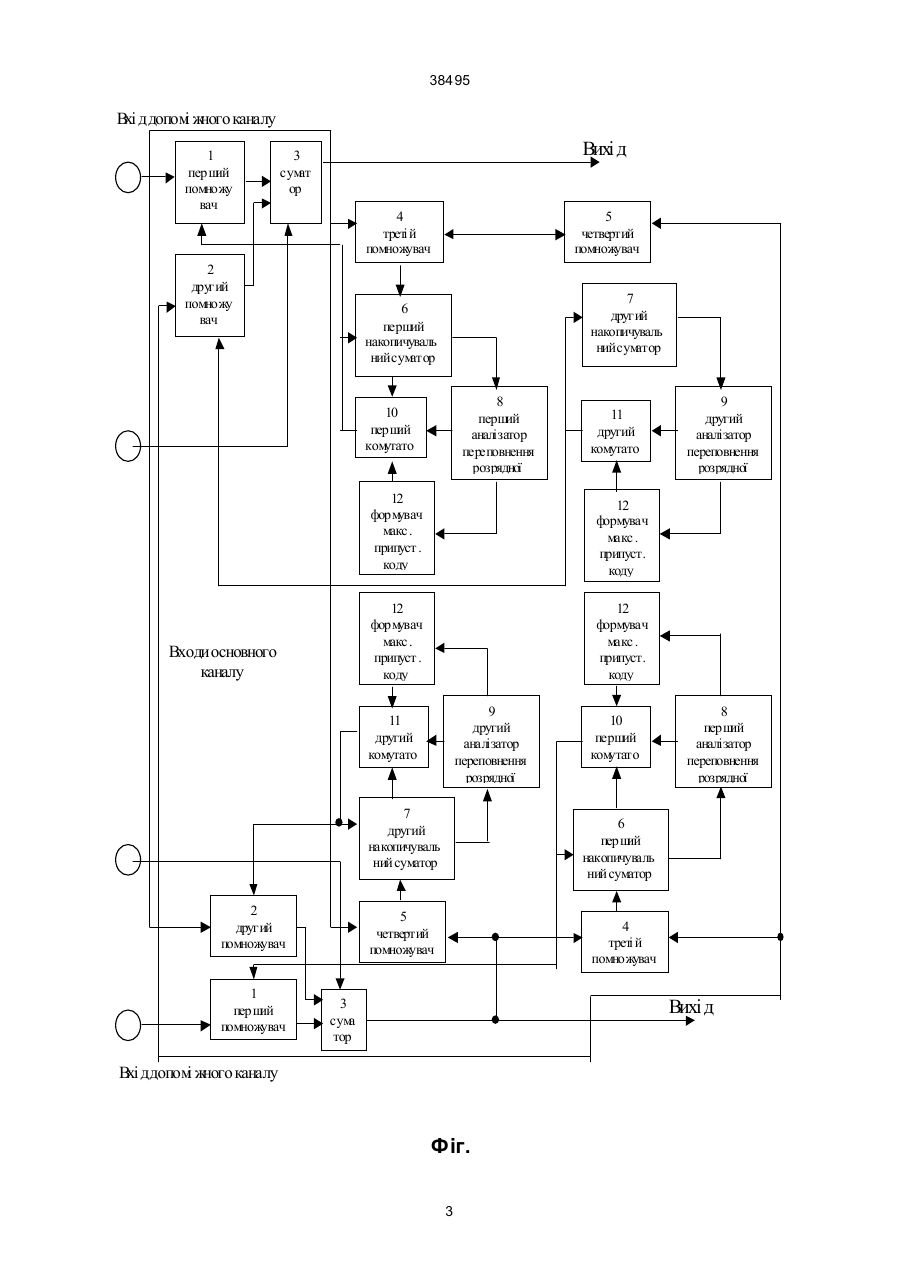
Автокомпенсатор завад цифровий, що містить два квадратурні основний та допоміжний канали, кожний з яких містить суматор, перший і другий помножувачі та перший і другий нагромаджувальні суматори, який відрізняється тим, що кожний з зазначених двох каналів додатково містить третій і четвертий помножувачі, виходи яких з’єднані з першими входами відповідних нагромаджувальних суматорів, виходи яких підключені відповідно до входів першого і другого аналізаторів переповнення розрядної сітки та перших входів комутаторів, а також містить перший і другий формувачі максимально припустимого коду, підключені до других входів відповідно першого і другого комутаторів, керуючі входи яких з’єднані з першими виходами відповідних аналізаторів переповнення розрядної сітки, другі виходи яких підключені до входів відповідних формувачів максимально припустимого коду, виходи комутаторів сполучені зі входами відповідно першого і другого помножувачів та другими входами нагромаджувальних суматорів, другий і третій входи суматора підключені до виходів першого і другого помножувачів, його вихід підключений до входів третього і четвертого помножувачів і є одночасно виходом відповідного квадратурного каналу, а перші входи суматорів та всіх помножувачів є входами відповідних каналів автокомпенсатора.
Текст
1. Автокомпенсатор завад цифровий, який включає основний канал та квадратурний допоміжний канал, що вміщує суматор, помножувачі та 38495 збільшення розрядної сітки на 4...5 розрядів. Більш високі вимоги до динамічного діапазону формованих вагових коефіцієнтів можуть мати місце при врахуванні впливів сигналів завад із напрямків по дальніх бічних пелюстках діаграми спрямованості, що носять порізаний випадковий характер. Розширення розрядності, крім погіршення вагогабаритних характеристик, призводить до зменшення смуги робочих частот. Отже, причиною, що перешкоджає досягненню очікуваного технічного результату, є розширена розрядність відомого пристрою. Задачею, поставленою при створенні даного винаходу, є в автокомпенсаторі завад цифровому шляхом зменшення розрядності досягти розширення смуги робочих частот і поліпшення вагогабаритних характеристик при суттєвому спрощенні схемної реалізації пристрою. Зазначена задача вирішується тим, що в автокомпенсаторі завад цифровому, який включає основний канал, та квадратурний допоміжний канал, що містить суматор, помножувачі та накопичуючи суматори, згідно з винаходом, пристрій додатково вміщує аналізатори переповнення розрядної сітки, комутатори, підключені до виходів накопичувальних суматорів, а також формувачі максимально припустимого коду. Керуючий вхід кожного з комутаторів пов'язаний із першим виходом відповідного аналізатора переповнення розрядної сітки, другий ви хід якого підключений до входу формувача максимально припустимого коду, а виходи комутаторів сполучені зі входами помножувачів. Суть винаходу пояснюється кресленням (фігура), де подана блок-схема пристрою. Відповідно до креслення, автокомпенсатор завад цифровий складається, наприклад, з двох квадратурних, основного та допоміжного, каналів, кожний з яких містить перший 1 і другий 2 помножувачі, суматор 3, третій 4 та четвертий 5 помножувачі, перший 6 та другий 7 накопичувальні суматори, перший 8 та другий 9 аналізатори переповнення розрядної сітки, перший 10 та другий 11 комутатори, підключені до виходів накопичувальних суматорів 6 та 7, а також формувачі 12 максимально припустимого коду, підключені до одного з входів першого 10 і другого 11 комутаторів, управляючі входи яких зв'язані з першим виходом відповідного аналізатора 8 або 9 переповнення розрядної сітки, другий вихід якого підключений до входу формувача максимально припустимого коду, а ви ходи комутаторів сполучені зі входами помножувачів, а їх виходи сполучені зі входами помножувачів 4 і 5. Пристрій працює наступним чином. На входи основного і допоміжного каналів автокомпенсатора завад надходять цифрові сигнали завад, прийняті різними антенами при компенсації активних завад, або прийняті однією антеною з попередньою затримкою на період слідування імпульсів зондування радіолокаційної станції при компенсації пасивних завад. При наявності на входа х автокомпенсатора цифрових кодів квадратурних складових сигналів завад на виходах третього 4 і четвертого 5 помножувачів виникають сигнали, що інтегруються в накопичувальних суматорах 6 і 7 і через комутатори 10 та 11 надходять на другі входи зважувальних помножувачів 1 і 2. Якщо інтенсивність сигналів завад в основному каналі менша, ніж у допоміжному, то через час, рівний часу адаптації автокомпенсатора, на виході накопичувальних суматорів 6 і 7 формуються оптимальні значення сигналів вагових коефіцієнтів. При цьому забезпечується мінімальна величина сигналів завад на виході суматора 3. Якщо інтенсивність сигналів завад в основному каналі більша, ніж у допоміжному, то відбувається переповнення розрядної сітки автокомпенсатора. Момент переповнення розрядної сітки фіксується аналізаторами 8 або 9, що здійснюється шляхом аналізу молодшого і старшого знакових розрядів результату накопичення в модифікованому коді, наприклад, за допомогою схеми «Вимикаюче АБО». При переповненні розрядної сітки аналізатори 8 або 9 формують сигнали, відповідно до яких цифрові комутатори 10 і 11 підключають до других входів зважувальних помножувачів 1 і 2 формувачі 12 максимально припустимого коду. Кожний з аналізаторів 8 або 9 переповнення розрядної сітки визначає знак числа переповнення. Якщо переповнилося негативне число, то на другому ви ході аналізатора 8 або 9 формується ознака, за якою формувачем максимально припустимого коду генерується число. При зменшенні інтенсивності завади в основному каналі, коли δ0 /δ1 1 , що характерне, наприклад, для подолання завад бічних пелюстків антени при впливові шумової завади від напрямку головного променя діаграми спрямованості, спотворені значення вагових коефіцієнтів заміняються вірними значеннями. При цьому забезпечується компенсація завад при обмеженій розрядності автокомпенсатора. Крім того, у запропонованому пристрої при обмеженій розрядності прийнятними є й динамічні характеристики. Це обумовлене тим, що після переповнення розрядної сітки самонастроювання (адаптація) параметрів автокомпенсатора виникає не від випадкового значення внаслідок переповнення вагового коефіцієнта, а від вірного значення. Використання винаходу спрощує реалізацію цифрового автокомпенсатора завад за рахунок зменшення розрядності при незначній вартості додатково введених вузлів корекції вагових коефіцієнтів, при цьому не посилюються вимоги до інших пристроїв радіотехнічних засобів. 2 38495 В д допом ж хі і ного каналу 1 перш ий помнож у вач Вихі д 3 сум ат ор 4 треті й помнож увач 2 другий помнож у вач 5 четвертий помнож увач 7 другий накопичуваль нийсум атор 6 перш ий накопичуваль нийсум атор 8 перш ий аналізатор переповнення розрядної 10 перш ий ком утато 11 другий комутато 12 форм увач макс . припуст . коду Входи основного каналу 12 формувач макс . припуст. коду 12 форм увач макс . припуст . коду 12 формувач макс . припуст. коду 9 другий аналізатор переповнення розрядної 11 другий комутато 7 другий накопичуваль ний суматор 2 другий помнож увач 1 перш ий помнож увач 9 другий аналізатор переповнення розрядної 10 перш ий ком утато 8 перш ий аналізатор переповнення розрядної 6 перш ий накопичуваль ний суматор 5 четвертий помнож увач 4 треті й помнож увач Вихі д 3 сум а тор В ддопом ж хі і ного каналу Фіг. 3 38495 _________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 4
ДивитисяДодаткова інформація
Назва патенту англійськоюDigital device for automatic compensation of interferences
Автори англійськоюMyroshnychenko Mykhailo Ivanovych, Piza Dmytro Makarovych, Nemchyn Oleksandr Fedorovych, Kopnov Mykhailo Oleksandrovych, Mokeiev Yurii Henadiiovych
Назва патенту російськоюЦифровое устройство для автоматической компенсации помех
Автори російськоюМирошниченко Михаил Иванович, Пиза Дмитрий Макарович, Немчин Александр Федорович, Копнов Михаил Александрович, Мокеев Юрий Геннадиевич
МПК / Мітки
МПК: G01S 7/36
Мітки: завад, цифровий, автокомпенсатор
Код посилання
<a href="https://ua.patents.su/4-38495-avtokompensator-zavad-cifrovijj.html" target="_blank" rel="follow" title="База патентів України">Автокомпенсатор завад цифровий</a>
Спосіб виділення сигналів акустичної емісії на фоні завад
Номер патенту: 47257
Опубліковано: 17.06.2002
Автори: Бабак Віталій Павлович, Філоненко Сергій Федорович
МПК: G01N 29/14
Мітки: акустичної, емісії, фоні, завад, спосіб, виділення, сигналів
Формула / Реферат:
Спосіб виділення сигналів акустичної емісії на фоні завад, що включає встановлення порога обмеження, реєстрацію сигналів акустичної емісії з одночасним вимірюванням їх характеристик, за якими здійснюється виділення сигналів акустичної емісії на фоні завад, який відрізняється тим, що встановлюються додатково ще три пороги обмеження, які відповідають мінімальній амплітуді, мінімальній та максимальній тривалості сигналів завад, що забезпечує...
Пристрій компенсації активних шумових завад
Номер патенту: 38217
Опубліковано: 15.05.2001
Автори: Мирошниченко Михайло Іванович, Луханін Михайло Іванович, КОПНОВ МИХАЙЛО ОЛЕКСАНДРОВИЧ, Немчин Олександр Федорович, Лаврентьєв Володимир Миколайович, КОНОНОВИЧ ВІКТОР ЯКОВИЧ, Мокеєв Юрій Геннадійович, Каспирович Олександр Геннадійович, Попов Олег Якович
МПК: G01S 7/36
Мітки: завад, компенсації, шумових, активних, пристрій
Формула / Реферат:
1. Пристрій компенсації активних шумових завад, що включає блок обчислення вагових коефіцієнтів, лінію затримки основного каналу, лінію затримки додаткового каналу, блок множення, блок віднімання, причому входи лінії затримки основного каналу і лінії затримки додаткового каналу є входами пристрою вихід лінії затримки додаткового каналу сполучений із першим входом блока множення, вихід якого сполучений із входом блока віднімання, перший вхід...
Узагальнений цифровий нерекурсивний фільтр

Номер патенту: 31455
Опубліковано: 15.12.2000
Автори: Філіпський Юрій Костянтинович, Бершадський Олексій Михайлович
МПК: H03H 17/06
Мітки: узагальнений, фільтр, нерекурсивний, цифровий
Текст:
...фільтра, у якому зміна конструкції нерекурсивно! частини та введення зворотного зв'язку призводить до можливості спрощення , а через те й до удешевления пристрою. Задачею наданого винаходу (п.2 формули) є створення узагальненого цифрового нерекурсивного фільтра за п.1, в якому шляхом підбору параметрів масштабуючих помножувачів та елементів затримки отримано фільтр низьких частот (ФНЧ) першого порядку. Задачею наданого винаходу (п.З...
Цифрова система компенсації несинхронних імпульсних завад
Номер патенту: 58183
Опубліковано: 15.07.2003
Автори: Чорнобородов Михайло Петрович, Часовський Валентин Олександрович, Чорнобородова Наталя Петрівна
МПК: G01S 7/36
Мітки: імпульсних, несинхронних, цифрова, завад, компенсації, система
Формула / Реферат:
Цифрова система компенсації несинхронних імпульсних завад, що містить запам'ятовуючий пристрій, вхід якого з'єднаний з входом системи і входом блока фазових фільтрів, вхід якого також приєднаний до входу системи, а його вихід приєднаний до його ж входу, блок виявлення та обчислення параметрів несинхронної імпульсної завади, основний вихід якого приєднаний до другого входу суматора, перший вхід якого приєднаний до виходу запам'ятовуючого...
Радіолокатор з пристроєм компенсації завад відніманням
Номер патенту: 32194
Опубліковано: 15.12.2000
Автори: Бахвалов Валентин Борисович, Кудрик Андрій Миколайович, Пророшин Сергій Михайлович
МПК: G01S 7/36
Мітки: відніманням, завад, компенсації, радіолокатор, пристроєм
Текст:
...(в тому числі і кругової) поляризації навіть за відсутністю просторових і часових відмінностей завади і сигналу. Поставлена задача вирішується тим, що в радіолокаторі з пристроєм компенсації завад відніманням, що містить антенну систему, антенний перемикач і пов'язаний з ним передавач імпульсного сигналу, приймач сигналу, пристрій віднімання та індикатор, згідно з винаходом антенна система виконана у вигляді рупорно-параболічної антени з...