Цифрова система компенсації несинхронних імпульсних завад
Номер патенту: 58183
Опубліковано: 15.07.2003
Автори: Чорнобородов Михайло Петрович, Чорнобородова Наталя Петрівна, Часовський Валентин Олександрович
Формула / Реферат
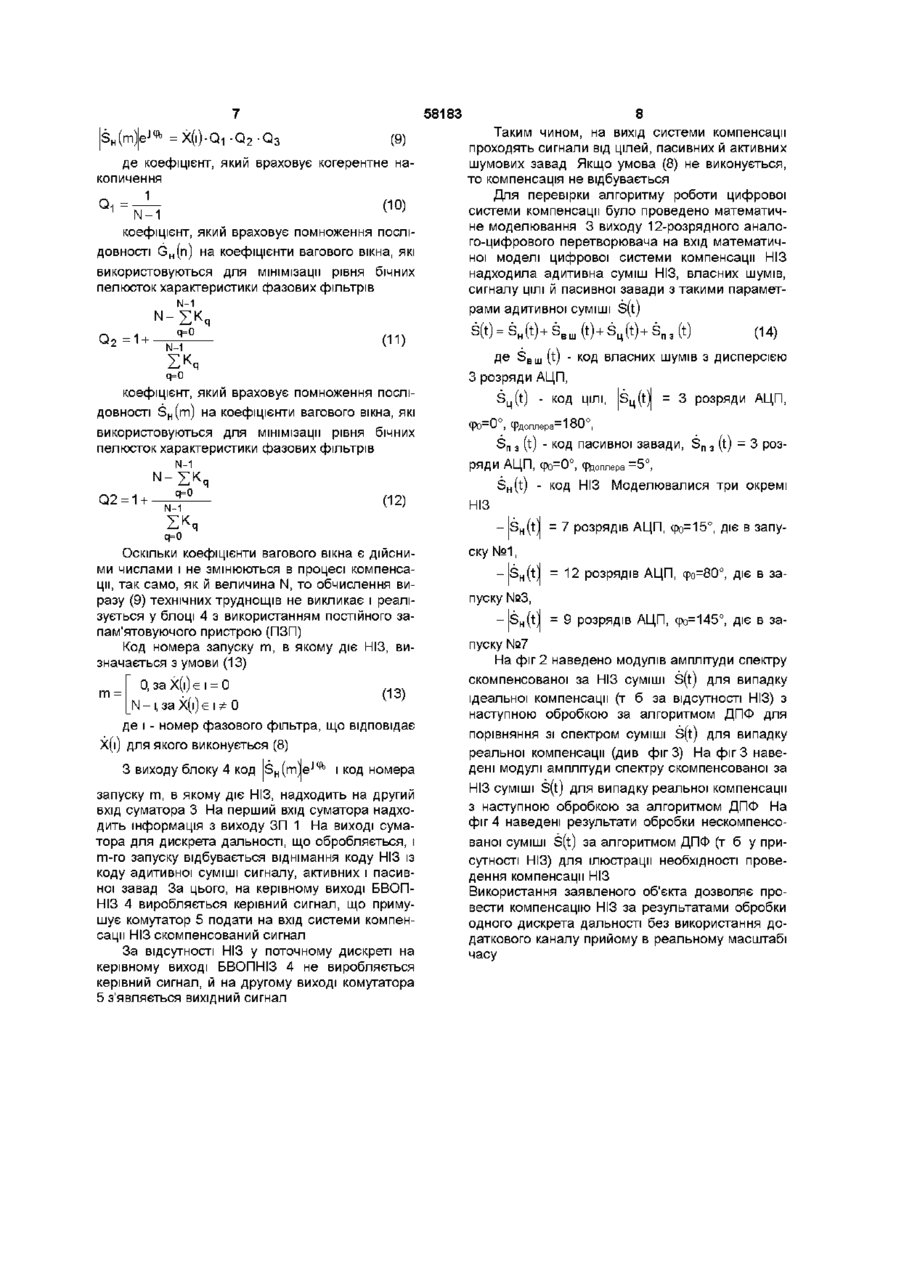
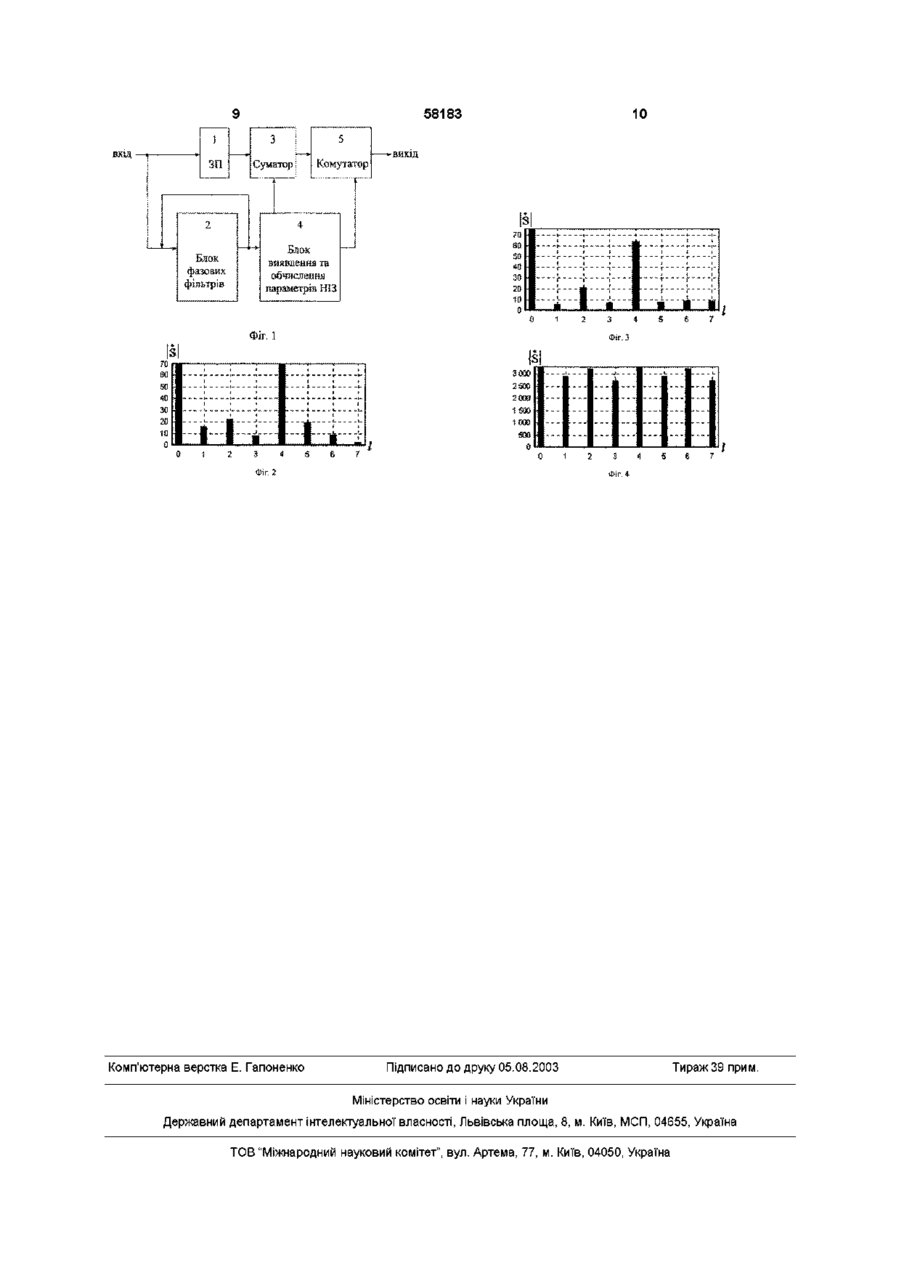
Цифрова система компенсації несинхронних імпульсних завад, що містить запам'ятовуючий пристрій, вхід якого з'єднаний з входом системи і входом блока фазових фільтрів, вхід якого також приєднаний до входу системи, а його вихід приєднаний до його ж входу, блок виявлення та обчислення параметрів несинхронної імпульсної завади, основний вихід якого приєднаний до другого входу суматора, перший вхід якого приєднаний до виходу запам'ятовуючого пристрою, який відрізняється тим, що додатково введено комутатор, причому вихід суматора приєднаний до входу комутатора, керований вхід якого приєднаний до керуючого виходу блока виявлення та обчислення параметрів несинхронної імпульсної завади, вхід якого приєднаний до виходу блока фазових фільтрів, перший вихід комутатора приєднаний до входу запам'ятовуючого пристрою й входу блока фазових фільтрів, а другий вихід комутатора є виходом системи.
Текст
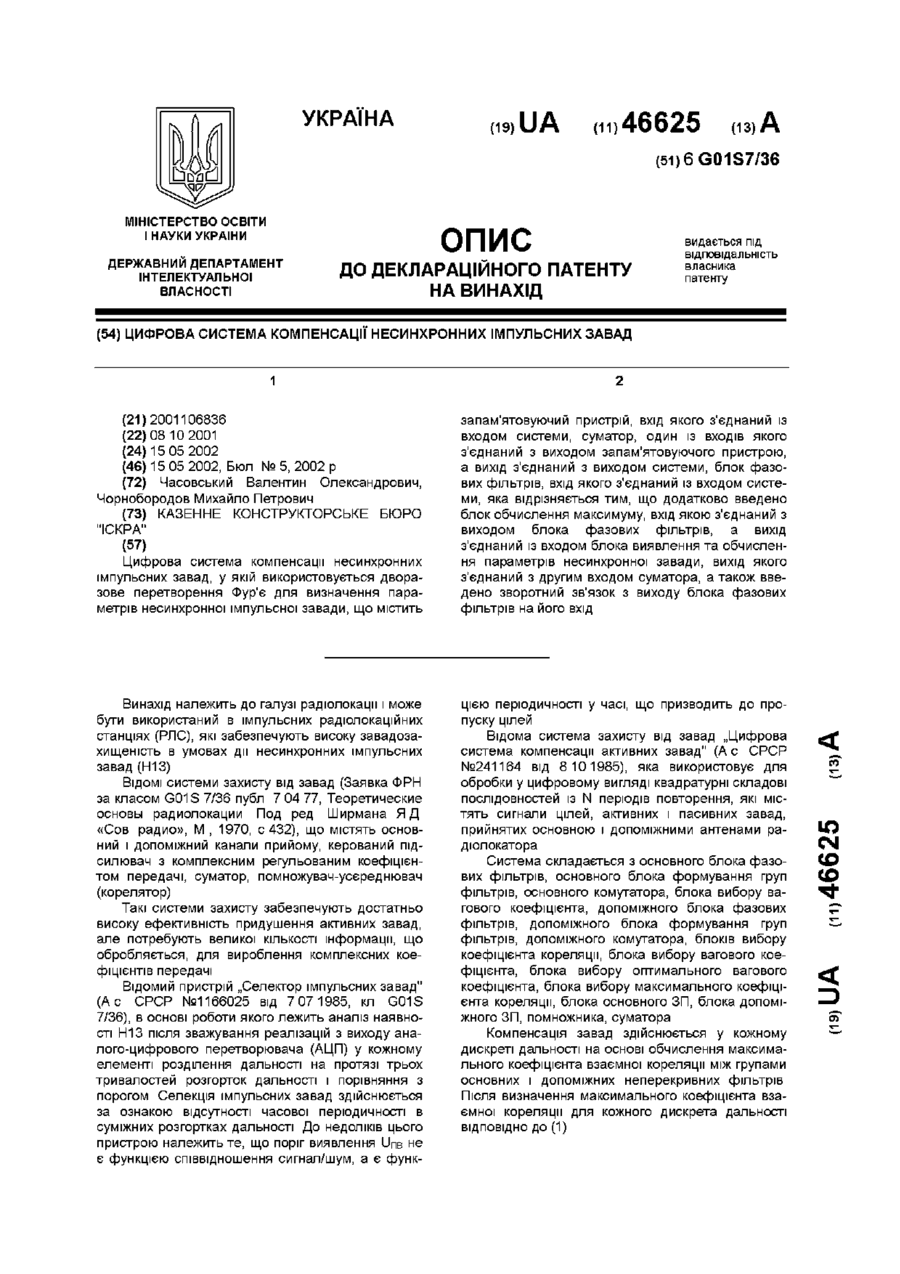
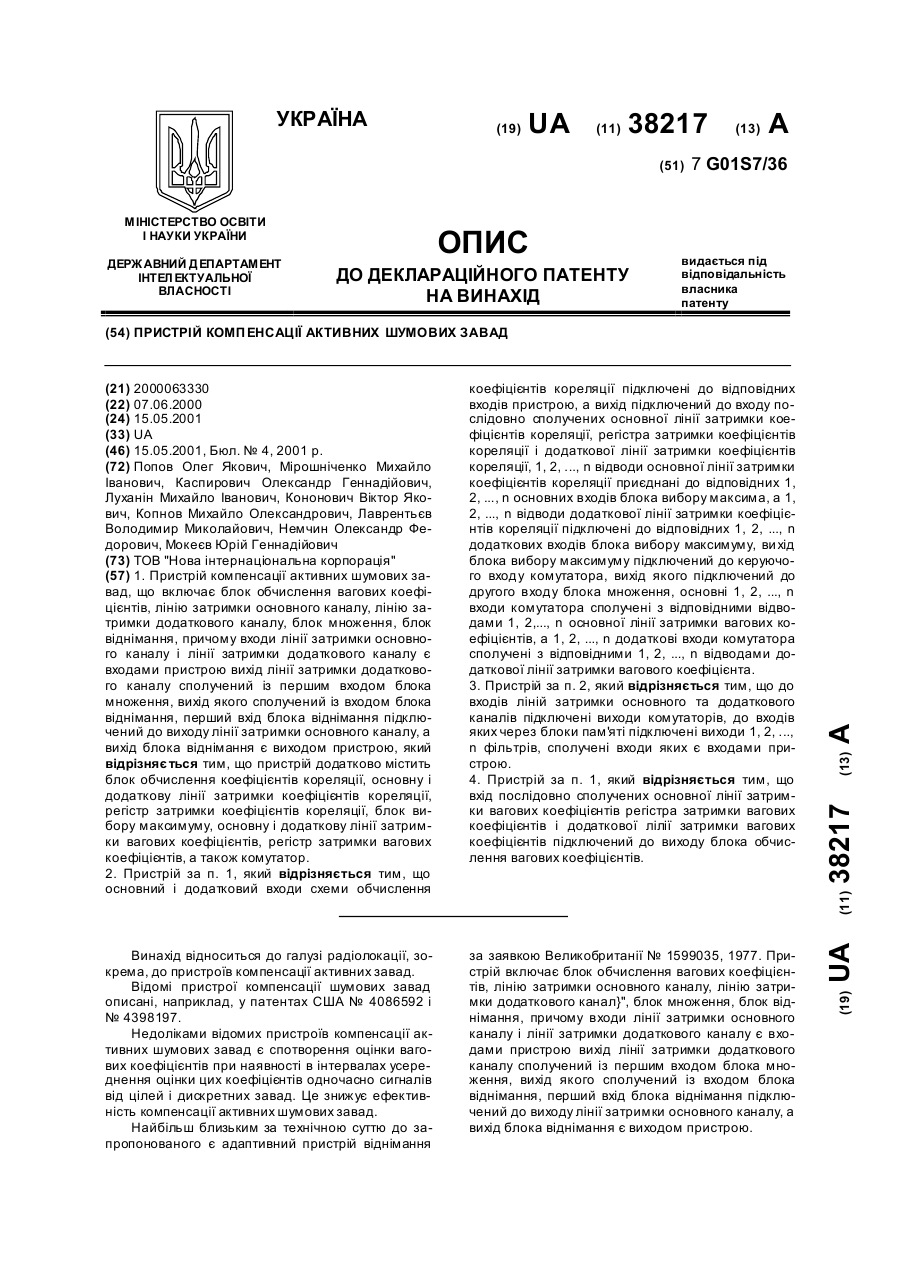
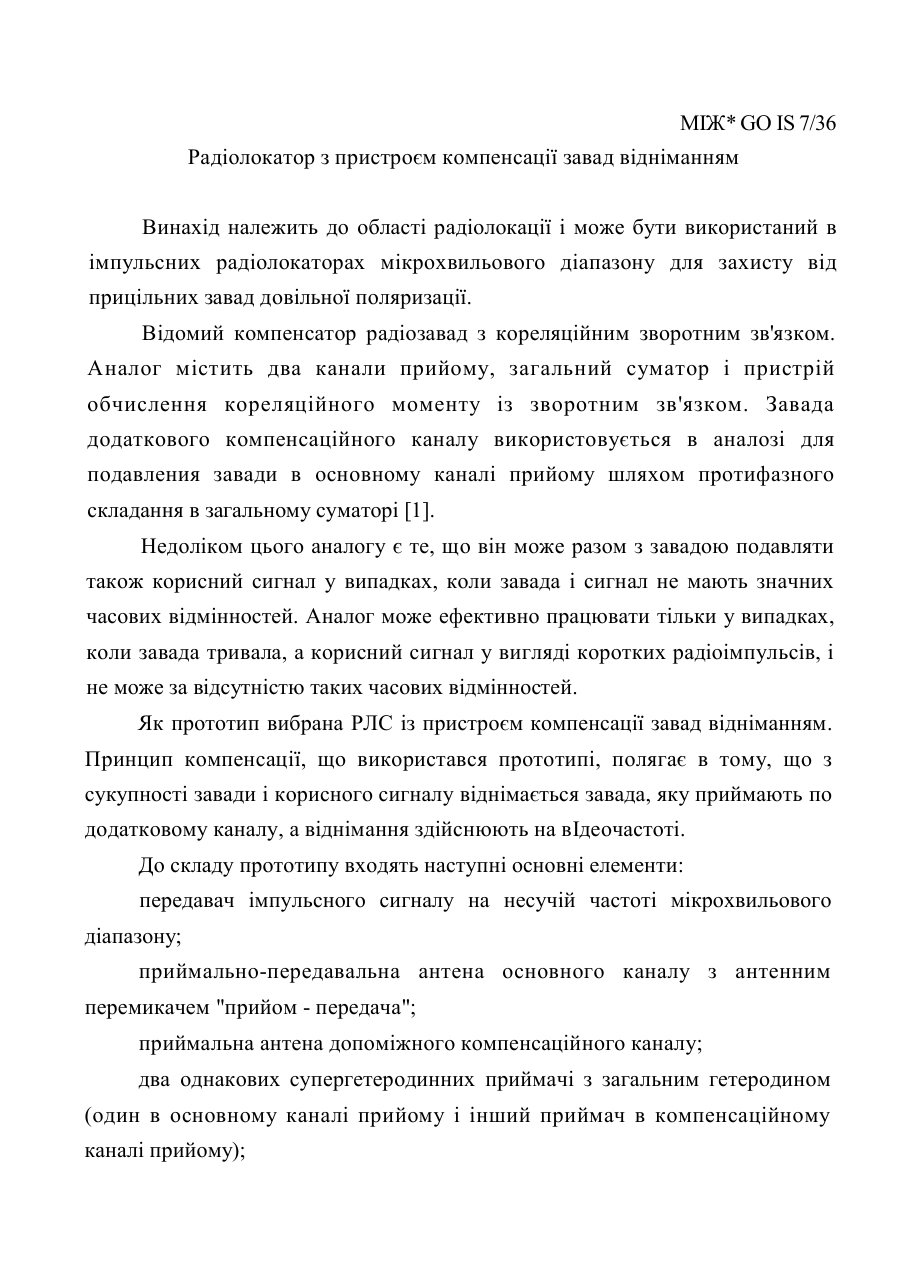
Цифрова система компенсації несинхронних імпульсних завад, що містить запам'ятовуючий пристрій, вхід якого з'єднаний з входом системи і входом блока фазових фільтрів, вхід якого також приєднаний до входу системи, а його вихід приєднаний до його ж входу, блок виявлення та обчис Винахід належить до галузі радіолокації й може бути використаний в імпульсних радіолокаційних станціях (РЛС), які забезпечують високу завадозахищеність в умовах дії несинхронних імпульсних завад (НІЗ) ВІДОМІ системи захисту від завад (заявка ФРН за класом G01S57/36 опубл 7 04 77 Теоретические основы радиолокации Под ред Ширмана Я Д «Сов радио», М , 1970, с 432), що містять основний та допоміжний канали прийому, керований підсилювач з комплексним регульованим коефіцієнтом передачі, суматор, помножувач-усереднювач (корелятор) Такі системи захисту забезпечують достатньо високу ефективність пригнічення активних завад, але потребують великої КІЛЬКОСТІ інформації, що обробляється, для вироблення комплексних коефіцієнтів передачі Відомий пристрій "Селектор імпульсних завад" (А с СРСР №1166025 від 7 071985, кл G01S57/36), в основі роботи якого лежить аналіз наявності НІЗ після зважування реалізацій з виходу аналого-цифрового перетворювача (АЦП) у кожному елементі розрізнення дальності протягом трьох тривалостей розгорток дальності й порівняння з порогом Селекція імпульсних завад здійснюється за ознакою відсутності часової періодичності в суміжних розгортках дальності До лення параметрів несинхронної імпульсної завади, основний вихід якого приєднаний до другого входу суматора, перший вхід якого приєднаний до виходу запам'ятовуючого пристрою, який відрізняється тим, що додатково введено комутатор, причому вихід суматора приєднаний до входу комутатора, керований вхід якого приєднаний до керуючого виходу блока виявлення та обчислення параметрів несинхронної імпульсної завади, вхід якого приєднаний до виходу блока фазових фільтрів, перший вихід комутатора приєднаний до входу запам'ятовуючого пристрою й входу блока фазових фільтрів, а другий вихід комутатора є виходом системи недоліків цього пристрою належить те, що межа виявлення UMB не є функцією співвідношення сигнал/шум, а є функцією періодичності у часі, що призводить до пропуску цілей Відома система захисту від завад "Цифрова система компенсації активних завад" (А с СРСР №241164 від 8 10 1985), яка використовує для обробки у цифровому вигляді квадратурні складові послідовностей з N періодів повторення, які містять сигнали від цілей, активних і пасивних завад, прийнятих основною і допоміжними антенами радіолокатора Система складається з основного блока фазових фільтрів, основного блока формування груп фільтрів, основного комутатора, блока вибору вагового коефіцієнта, допоміжного блока фазових фільтрів, допоміжного блока формування груп фільтрів, допоміжного комутатора, блоків вибору коефіцієнта кореляції, блока вибору вагового коефіцієнта, блока вибору оптимального вагового коефіцієнта, блока вибору максимального коефіцієнта кореляції, блока основного ЗП, блока допоміжного ЗП, помножника, суматора Компенсація завад здійснюється у кожному дискреті дальності на основі обчислення максимального коефіцієнта взаємної кореляції між групами основних і допоміжних неперекривних фільтрів Після визначення максимального коефіцієн СО 00 00 ю 58183 та взаємної кореляції для кожного дискрета дальності ВІДПОВІДНО до (1) J OCH и д о п (1) J J OCH flon де р - модуль коефіцієнта кореляції основного та допоміжного каналів, осн - модуль амплітуди основного каналу, Одоп - модуль амплітуди допоміжного каналу, п*доп - амплітуда комплексно-спряженого сигналу допоміжного каналу, вибирається ВІДПОВІДНИЙ комплексний ваговий коефіцієнт, який залишається незмінним для кожного поточного дискрета дальності на час проходження пакета з N зондувань К = иосн •и*доп метрів несинхронної імпульсної завади, и містить запам'ятовуючий пристрій, вхід якого з'єднаний з входом системи, суматор, однин зі входів якого з'єднаний з виходом запам'ятовуючого пристрою, а вихід з'єднаний з виходом системи, блок фазових фільтрів, вхід якого з'єднано зі входом системи, блок обчислення максимуму, вхід якого з'єднаний з виходом блока фазових фільтрів, а вихід з'єднаний зі входом блока виявлення та обчислення параметрів несинхронної імпульсної завади, вихід якого з'єднаний з другим входом суматора, а також введено зворотній зв'язок з виходу блока фазових фільтрів на його ж вхід У цій системі здійснюється компенсація НІЗ за результатами обробки одного дискрета дальності без використання допоміжного каналу обробки Для цього вхідний сигнал піддають дворазовому перетворенню Фур'є й серед амплітуд ДВІЧІ розфільтрованої інформації для кожного дискрета дальності знаходять найбільшу амплітуду (2) ДОП Суттєвими ознаками, що збігаються з пропонованою цифровою системою компенсації несинхронних імпульсних завад, є наявність основного запам'ятовуючого пристрою, суматора, основного блока фазових фільтрів До недоліків даної системи належить побудова допоміжного каналу обробки радіолокатора Також відома "Система компенсації активних завад" (А с СРСР №238033 від 21 08 1985), яка містить основний та допоміжний блоки фазових фільтрів, блок обчислення вагового коефіцієнта, основний й допоміжний запам'ятовуючі пристрої, суматор, помножувач, основний й допоміжний комутатори У цій системі ваговий коефіцієнт компенсатора може обчислюватися за завадою, яка діє в одному дискреті дальності Ослаблення впливу корисного сигналу на якість компенсації дискретної завади досягається використанням усередненого вагового коефіцієнта для великої КІЛЬКОСТІ фільтрів, що не перекриваються за частотою, розрахованих для одного дискрета дальності Суттєвими ознаками, що збігаються з пропонованою цифровою системою компенсації несинхронних імпульсних завад, є наявність основного запам'ятовуючого пристрою, суматора, основного блока фазових фільтрів До недоліків цієї системи треба віднести зниження ефективності компенсації активної завади, коли КІЛЬКІСТЬ неперекривних фільтрів, вільних від пасивних завад і сигналів від цілей, невелика, і тому наявність пасивних завад і цілей починає позначатися на результаті компенсації, обов'язкове використання допоміжного каналу, що призводить до значних витрат обладнання Найближчою за технічною сутністю й результатом, що досягається, до пропонованої цифрової системи захисту від імпульсних завад є "Цифрова система компенсації несинхронних імпульсних завад" (патент України №46625А, кл G01S7/36, 15,05 2002), що використовує дворазове перетворення Фур'є для визначення пара МАХ та порівнюють м з межовим значен ням Р н За виконання умови Х(м Р м (8) то відбувається обчислення коду S H (m)e J C f t Сутність алгоритму обчислення полягає у необхідності проведення перерахунок Х(і), пов'язаного з когерентним накопиченням, перерахунок Х(і), пов'язаного з помноженням на коефіцієнт вагового вікна Kq перерахунок Х(і), пов'язаного з помноженням на коефіцієнт вагового вікна К т Оскільки ЦІ перерахунки пов'язані з використанням сталих коефіцієнтів, то S H (mle J C f t можна подати у вигляді (9) 58183 Sum e JCft = Х(і)-О1-О2-О3 (9) де коефіцієнт, який враховує когерентне накопичення коефіцієнт, який враховує помноження ПОСЛІДОВНОСТІ G H (n) на коефіцієнти вагового вікна, які використовуються для мінімізації рівня бічних пелюсток характеристики фазових фільтрів N-1 ) = s H (t) T° N-1 q q=0 коефіцієнт, який враховує помноження ПОСЛІДОВНОСТІ S H (m) на коефіцієнти вагового вікна, які використовуються для мінімізації рівня бічних пелюсток характеристики фазових фільтрів N-1 Q2 = q=0 N-1 (12) q=0 Оскільки коефіцієнти вагового вікна є дійсними числами і не змінюються в процесі компенсації, так само, як й величина N, то обчислення виразу (9) технічних труднощів не викликає і реалізується у блоці 4 з використанням постійного запам'ятовуючого пристрою (ПЗП) Код номера запуску т , в якому діє НІЗ, визначається з умови (13) 0,заХ(і)єі = 0 N - і, за Х(і) є і Ф 0 де і - номер фазового фільтра, що відповідає Х(і) для якого виконується (8) т 8 Таким чином, на вихід системи компенсації проходять сигнали від цілей, пасивних й активних шумових завад Якщо умова (8) не виконується, то компенсація не відбувається Для перевірки алгоритму роботи цифрової системи компенсації було проведено математичне моделювання 3 виходу 12-розрядного аналого-цифрового перетворювача на вхід математичної моделі цифрової системи компенсації НІЗ надходила адитивна суміш НІЗ, власних шумів, сигналу ЦІЛІ й пасивної завади з такими параметрами адитивної суміші S(t) = З виходу блоку 4 код S H (mle J C f t і код номера запуску т , в якому діє НІЗ, надходить на другий вхід суматора 3 На перший вхід суматора надходить інформація з виходу ЗП 1 На виході суматора для дискрета дальності, що обробляється, і m-го запуску відбувається віднімання коду НІЗ із коду адитивної суміші сигналу, активних і пасивної завад За цього, на керівному виході БВОПНІЗ 4 виробляється керівний сигнал, що примушує комутатор 5 подати на вхід системи компенсації НІЗ скомпенсований сигнал За відсутності НІЗ у поточному дискреті на керівному виході БВОПНІЗ 4 не виробляється керівний сигнал, й на другому виході комутатора 5 з'являється вихідний сигнал t -вш w Де S 'вш (t) ' З розряди АЦП, ЬЦ\1) - КОД К0 ' W L(\V sn, t ' ~ п з (w j (14) Д власних шумів з дисперсією = 3 розряди АЦП, ЦІЛІ, фО=0°, фдоплера-180°, S n , ft) - код пасивної завади, S ряди АЦП, фо=0°, фдс (t) = 3 роз =5 С - код НІЗ Моделювалися три окремі НІЗ = 7 розрядів АЦП, фо=15°, діє в запу - sH(t ску №1, = 12 розрядів АЦП, фо=80°, діє в за - sH(t пуску МаЗ, - sH(t = 9 розрядів АЦП, фо=145°, діє в заі пуску №7 На фіг 2 наведено модулів амплітуди спектру скомпенсованої за НІЗ суміші S(t) для випадку ідеальної компенсації (т б за відсутності НІЗ) з наступною обробкою за алгоритмом ДПФ для порівняння зі спектром суміші S(t) для випадку реальної компенсації (див фігЗ) На фіг 3 наведені модулі амплітуди спектру скомпенсованої за НІЗ суміші S(t) для випадку реальної компенсації з наступною обробкою за алгоритмом ДПФ На фіг 4 наведені результати обробки нескомпенсованої суміші S(t) за алгоритмом ДПФ (т б у присутності НІЗ) для ілюстрації необхідності проведення компенсації НІЗ Використання заявленого об'єкта дозволяє провести компенсацію НІЗ за результатами обробки одного дискрета дальності без використання додаткового каналу прийому в реальному масштабі часу 58183 10 -ВИХІД вхід —, Блок виявлення та обчислення параметрів НІ З 10 о 1 Фіг. 1 1 2 3 4 5 Фіг. З 2000 1500 1: і: 3 2 Т 3 ФІГ 4 S 2 Комп'ютерна верстка Е. Гапоненко Підписано до друку 05.08.2003 Тираж39 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, Львівська площа, 8, м. Київ, МСП, 04655, Україна ТОВ "Міжнародний науковий комітет", вул. Артема, 77, м. Київ, 04050, Україна
ДивитисяДодаткова інформація
Назва патенту англійськоюDigital device for compensation of asynchronous pulse interferences
Автори англійськоюChasovskyi Valentyn Oleksandrovych
Назва патенту російськоюЦифровое устройство для компенсации несинхронных импульсных помех
Автори російськоюЧасовский Валентин Александрович
МПК / Мітки
МПК: G01S 7/36
Мітки: несинхронних, цифрова, система, імпульсних, завад, компенсації
Код посилання
<a href="https://ua.patents.su/5-58183-cifrova-sistema-kompensaci-nesinkhronnikh-impulsnikh-zavad.html" target="_blank" rel="follow" title="База патентів України">Цифрова система компенсації несинхронних імпульсних завад</a>
Цифрова система компенсації несинхронних імпульсних завад
Номер патенту: 46625
Опубліковано: 15.05.2002
Автори: Часовський Валентин Олександрович, Чорнобородов Михайло Петрович
МПК: G01S 7/36
Мітки: несинхронних, завад, компенсації, цифрова, імпульсних, система
Формула / Реферат:
Цифрова система компенсації несинхронних імпульсних завад, у якій використовується дворазове перетворення Фур'є для визначення параметрів несинхронної імпульсної завади, що містить запам'ятовуючий пристрій, вхід якого з'єднаний із входом системи, суматор, один із входів якого з'єднаний з виходом запам'ятовуючого пристрою, а вихід з'єднаний з виходом системи, блок фазових фільтрів, вхід якого з'єднаний із входом системи, яка відрізняється тим,...
Пристрій компенсації активних шумових завад
Номер патенту: 38217
Опубліковано: 15.05.2001
Автори: Лаврентьєв Володимир Миколайович, Мокеєв Юрій Геннадійович, КОНОНОВИЧ ВІКТОР ЯКОВИЧ, Луханін Михайло Іванович, Мирошниченко Михайло Іванович, Каспирович Олександр Геннадійович, КОПНОВ МИХАЙЛО ОЛЕКСАНДРОВИЧ, Немчин Олександр Федорович, Попов Олег Якович
МПК: G01S 7/36
Мітки: пристрій, шумових, активних, компенсації, завад
Формула / Реферат:
1. Пристрій компенсації активних шумових завад, що включає блок обчислення вагових коефіцієнтів, лінію затримки основного каналу, лінію затримки додаткового каналу, блок множення, блок віднімання, причому входи лінії затримки основного каналу і лінії затримки додаткового каналу є входами пристрою вихід лінії затримки додаткового каналу сполучений із першим входом блока множення, вихід якого сполучений із входом блока віднімання, перший вхід...
Радіолокатор з пристроєм компенсації завад відніманням
Номер патенту: 32194
Опубліковано: 15.12.2000
Автори: Пророшин Сергій Михайлович, Кудрик Андрій Миколайович, Бахвалов Валентин Борисович
МПК: G01S 7/36
Мітки: пристроєм, відніманням, завад, радіолокатор, компенсації
Текст:
...(в тому числі і кругової) поляризації навіть за відсутністю просторових і часових відмінностей завади і сигналу. Поставлена задача вирішується тим, що в радіолокаторі з пристроєм компенсації завад відніманням, що містить антенну систему, антенний перемикач і пов'язаний з ним передавач імпульсного сигналу, приймач сигналу, пристрій віднімання та індикатор, згідно з винаходом антенна система виконана у вигляді рупорно-параболічної антени з...
Радіолокатор з пристроєм компенсації завад
Номер патенту: 32193
Опубліковано: 15.12.2000
Автори: Бахвалов Валентин Борисович, Пророшин Сергій Михайлович, Кудрик Андрій Миколайович
МПК: G01S 7/36
Мітки: завад, пристроєм, компенсації, радіолокатор
Текст:
...пристрої використовуються поляризаційні відмінності завади і луна-сигналу цілі. Випромінюється зондуючий сигнал горизонтальної поляризації і луна-сигнал цілі також має в основному горизонтальну поляризацію. Припускається, що завада має лінійну поляризацію і містить як горизонтальну, так і вертикальну складові поля. Фази цих складових однакові, а амплітуди можуть відрізнятися, але не дуже сильно. Запропонований пристрій призначений для...
Радіолокатор з пристроєм компенсації активних завад відніманням
Номер патенту: 46937
Опубліковано: 17.06.2002
Автори: Пророшин Сергій Михайлович, Бахвалов Валентин Борисович, Кудрик Андрій Миколайович
МПК: G01S 7/36
Мітки: відніманням, компенсації, активних, пристроєм, завад, радіолокатор
Формула / Реферат:
Радіолокатор з пристроєм компенсації активних завад відніманням, що містить передавач з передавальною антеною, приймальну апертурну антену з круглим хвилеводом, приймач сигналу, пристрій віднімання і індикатор, який відрізняється тим, що до складу радіолокатора додатково включений вимірювач відношення амплітуд і зсуву фаз вертикальної і горизонтальної складових завад, що складається з розташованих у хвилеводі приймальної антени вертикального...
Попередній патент: Привід круглов’язальної машини
Наступний патент: Спосіб роботи двигуна внутрішнього згоряння
Випадковий патент: Енергозберігаючий стрічковий водопідіймач